竖井联系测量坐标计算表1
超深竖井联系测量方法及其精度的分析与研究

超深竖井联系测量方法及其精度的分析与研究摘要:随着国民经济发展,国内各大城市基础建设需求,为确保民生越来越多的地下管隧形式的电力、供水、交通工程不断开展,随着城市建设进程的发展各类超深超长的管隧工程不断涌现,为了满足地下隧道掘进按照设计要求贯通,工程测量工作的难度不断加大,研究并做好能够满足施工所需的测量工作迫在眉睫,地下管隧施工测量包括:地面控制测量,竖井联系测量和地下导线测量,这几个阶段,较现有测量技术而言,目前主要的难点在于如何控制好竖井联系测量的误差,但随着竖井的深度约来越深,如何减少或加强竖井联系测量的精度是关键。
基于此,本文分析研究了超深竖井联系测量方法及其精度,以供参考。
关键词:超深竖井;联系测量方法;精度前言:竖井联系测量是将地面控制网的坐标、方位按照设计要求的精度准确的传递至地下施工控制导线,为地下隧道施工提供依据,传统竖井联系测量较多主要有投点仪加陀螺仪定向、垂线加陀螺仪定向、联系三角形、竖直导线,根据现场工况不同采用相应的方法。
目前在竖井联系测量通常采用联系三角形测量和竖直导线定向法,联系三角形测量存在工序繁多、操作繁琐、工作时间较长、工作强度大等不足,导线定向法不足在于导线边短且俯仰角过大,在测量观测中受到仪器误差、目标瞄准误差、目标偏心误差、数据量不足等因素会产生较大测量误差,影响测量成果精度。
总的来说,传统联系测量技术该项工艺准备工作复杂,受环境因素影响较大,测量成果稳定性较差,测量精度和时效性会随竖井深度和施工工况影响而降低,无法满足高精度施工测量要求。
为了实现上述的目的,本技术方案是:一种用于超深竖井自动联系测量的方法,包括如下步骤:1)设计自动联系测量的测站点,在每个测站点安装强制归中测量架;2)在竖井井口一侧已知测站架设有自动测量功能的全站仪,在地面控制网中选择另外一个已知点架设棱镜作为后视点;在竖井的井壁处分别架设带有自动测量功能的全站仪若干台,在竖井底部架设带有自动测量功能的全站仪作为井底起始测站,隧道内近井口处架设棱镜作为井底的前视测点;3)用笔记本电脑连接无线数据传输模块进行联机调试,调整全站仪、棱镜装置及软件参数;4)由笔记本电脑程序控制井上架设有的自动测量功能全站仪的测站,完成一次竖直导线从井上已知点传递至井下起算测点,获得井下起算测站的方向和坐标。
隧道两井定向联系测量
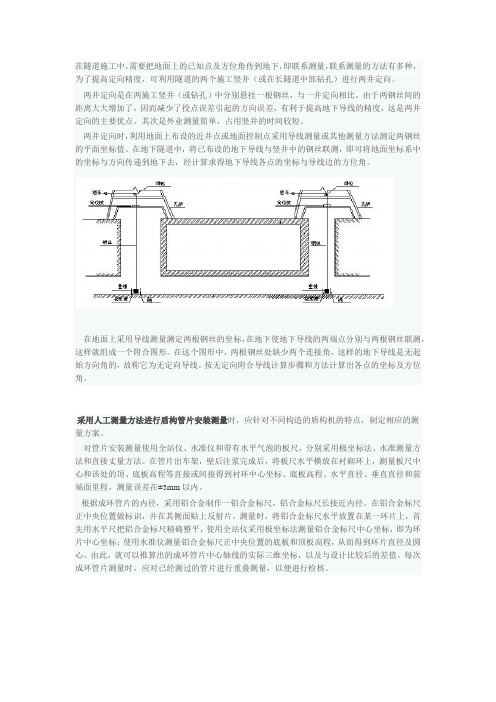
在隧道施工中,需要把地面上的已知点及方位角传到地下,即联系测量,联系测量的方法有多种,为了提高定向精度,可利用隧道的两个施工竖井(或在长隧道中部钻孔)进行两井定向。
两井定向是在两施工竖井(或钻孔)中分别悬挂一根钢丝,与一井定向相比,由于两钢丝间的距离大大增加了,因而减少了投点误差引起的方向误差,有利于提高地下导线的精度,这是两井定向的主要优点。
其次是外业测量简单,占用竖井的时间较短。
两井定向时,利用地面上布设的近井点或地面控制点采用导线测量或其他测量方法测定两钢丝的平面坐标值。
在地下隧道中,将已布设的地下导线与竖井中的钢丝联测,即可将地面坐标系中的坐标与方向传递到地下去,经计算求得地下导线各点的坐标与导线边的方位角。
在地面上采用导线测量测定两根钢丝的坐标,在地下使地下导线的两端点分别与两根钢丝联测,这样就组成一个附合图形。
在这个图形中,两根钢丝处缺少两个连接角,这样的地下导线是无起始方向角的,故称它为无定向导线。
按无定向附合导线计算步骤和方法计算出各点的坐标及方位角。
采用人工测量方法进行盾构管片安装测量时,应针对不同构造的盾构机的特点,制定相应的测量方案。
对管片安装测量使用全站仪、水准仪和带有水平气泡的板尺,分别采用极坐标法、水准测量方法和直接丈量方法。
在管片出车架,壁后注浆完成后,将板尺水平横放在衬砌环上,测量板尺中心和该处的顶、底板高程等直接或间接得到衬环中心坐标、底板高程、水平直径、垂直直径和前端面里程,测量误差在±3mm以内。
根据成环管片的内径,采用铝合金制作一铝合金标尺,铝合金标尺长接近内径。
在铝合金标尺正中央位置做标识,并在其侧面贴上反射片。
测量时,将铝合金标尺水平放置在某一环片上,首先用水平尺把铝合金标尺精确整平,使用全站仪采用极坐标法测量铝合金标尺中心坐标,即为环片中心坐标;使用水准仪测量铝合金标尺正中央位置的底板和顶板高程,从而得到环片直径及圆心。
由此,就可以推算出的成环管片中心轴线的实际三维坐标,以及与设计比较后的差值。
联系测量
地面连接测量:先在C点上架设全站仪,在二根钢丝上粘贴 配套的反射片,利用全站仪免棱镜测量功能测量a、b的距离, 用检验合格的钢卷尺丈量出c的距离.每次独立测量三测回,每 测回三次读数,各测回较差应小于1mm,角度观测采用全圆 观测,独立测量三次,取其平均值作为定向成果。测角中误差 在±2.5″之内。
2、投点误差与投向误差的类型
1、联系测量
减少投点误差的主要措施:
1)尽量增大两垂球线间距离,并选择合理的垂球线位置; 2)测量时最好停止风机运转,以减少风速; 3)减少周边震动对钢丝、仪器的影响; 4)采用高强度、小直径的(0.3mm)钢丝,适当加大垂球 重量,并将垂球浸入到有稠度的液体中; 5)减少滴水对垂球线及垂球的影响。 6)检查垂球是否自由悬挂,确保垂球自由悬挂。
度(km )
水平 仪 等级
水平 尺
观测次数
往返较差、附合 或
环线闭合差(mm)
与已知点 联测
附合或 环线
平坦地
山地
±2
±4
2~4
DS1
因瓦 尺
往返测 各一次
往返测 各一次
±8√L ±2√n
注:L 为往返测段、附合或环线的路线长度(km);n为单程的测站数。
1、联系测量
钢丝自由悬挂的检查 (1) 信号圈法
(2) 比距法 比距法是采用比较井上、井下两钢丝间距离的方
法进行检查。(上下井二根钢丝之间的距离差不超过2毫 米)
投点误差
1、联系测量
由地面向定向水平投点时,由于井筒内气流、滴 水等影响,使得垂球线在地面上的位置投到定向 水平后会发生偏离。
投向误差 由投点误差引起的垂球线连线的方向误差
离}÷(24×实测时张力2) • 计算值非常小可忽略不计。
竖井联系测量

竖井联系测量人民交通一、竖井联系测量的任务在隧道施工中,常用竖井在隧道中间增加掘进工作面,从多面同时掘进,可以缩短贯通段的长度,提高施工进度。
这时,为了保证相向开挖面能正确贯通,就必须将地面控制网中的坐标、方向及高程,经由竖井传递到地下去,这些传递工作称为竖井联系测量。
其中坐标和方向的传递,称为竖井定向测量。
通过定向测量,使地下平面控制网与地面上有统一的坐标系统。
而通过高程传递则使地下高程系统获得与地面统一的起算数据。
按照地下控制网与地面上联系的形式不同,定向的测量方法可分为下列四种:1.经过一个竖井定向(简称一井定向);2.经过两个竖井定向(简称两井定向);3.经过横洞(平坑)与斜井的定向;4.应用陀螺经纬仪定向。
竖井的联系测量可通过一个井筒、也可同时通过两个井筒进行。
这种联系测量是利用地上、地下控制点之间的几何关系将坐标、方向和高程引入地下,故称几何定向。
平峒的联系测量可通过一个井筒、也可同时通过两个井筒进行。
这种联系测量是利用地上、地下控制点之间的几何关系将坐标、方向和高程引入地下。
由于平峒隧道有进口和出口,导线和水准线路可从隧道两端引进,大大缩短贯通长度。
其作业方法与地面控制测量相同。
斜井的联系测量方法与平峒基本相同。
不同处是隧道坡度较大,导线测量要注意坡度的影响。
另外,斜井大部分为单头掘进,从洞口引进的导线均为支导线,要加强检核,以防止联系测量出现错误。
由于陀螺仪技术的飞速发展,在导航和测量工作中已被广泛应用。
陀螺仪重量轻、体积小、精度高、使用方便,在隧道联系测量工作中,不失为一种经济、快速、影响小的现代化定向仪器。
高程联系测量是将地面高程引入地下,又称导入高程。
显而易见,为使地下隧道(巷道)贯通,地上、地下的控制点必须在同一个坐标系统和高程系统。
地下工程与地面工程的相对位置也必须正确无误;地下建(构)筑物的相对关系,也必须精确。
如此种种,说明联系测量是非常重要的。
几何定向几何定向分一井定向和两井定向。
竖井联系测量方法比较探讨
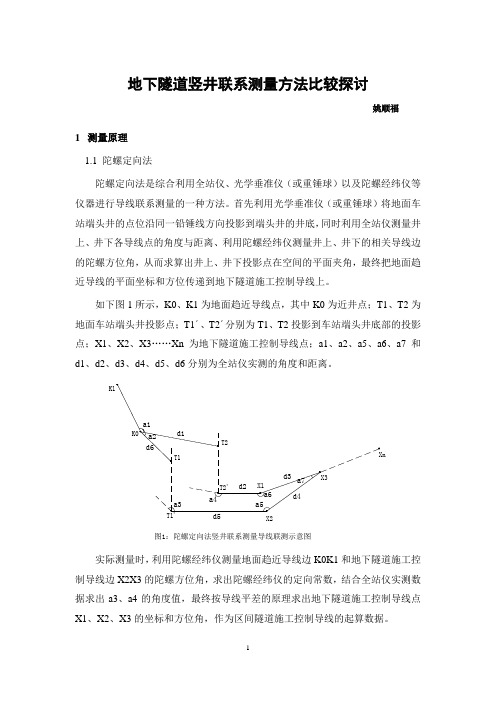
地下隧道竖井联系测量方法比较探讨姚顺福1 测量原理1.1 陀螺定向法陀螺定向法是综合利用全站仪、光学垂准仪(或重锤球)以及陀螺经纬仪等仪器进行导线联系测量的一种方法。
首先利用光学垂准仪(或重锤球)将地面车站端头井的点位沿同一铅锤线方向投影到端头井的井底,同时利用全站仪测量井上、井下各导线点的角度与距离、利用陀螺经纬仪测量井上、井下的相关导线边的陀螺方位角,从而求算出井上、井下投影点在空间的平面夹角,最终把地面趋近导线的平面坐标和方位传递到地下隧道施工控制导线上。
如下图1所示,K0、K1为地面趋近导线点,其中K0为近井点;T1、T2为地面车站端头井投影点;T1´、T2´分别为T1、T2投影到车站端头井底部的投影点;X1、X2、X3……Xn为地下隧道施工控制导线点;a1、a2、a5、a6、a7和d1、d2、d3、d4、d5、d6分别为全站仪实测的角度和距离。
X2图1:陀螺定向法竖井联系测量导线联测示意图实际测量时,利用陀螺经纬仪测量地面趋近导线边K0K1和地下隧道施工控制导线边X2X3的陀螺方位角,求出陀螺经纬仪的定向常数,结合全站仪实测数据求出a3、a4的角度值,最终按导线平差的原理求出地下隧道施工控制导线点X1、X2、X3的坐标和方位角,作为区间隧道施工控制导线的起算数据。
1.2 钻孔投点法钻孔投点法实际上是根据长边投影时投影点的点位投影误差对投影边的坐标方位角影响将大大削弱的原理进行导线联系测量的一种方法。
其基本思想是在隧道前进(或后退)的方向上已开挖的地方离开车站端头井一定的距离(一般应大于150m ),从地面钻孔直达地下隧道中,然后利用光学垂准仪(或重锤球)分别通过车站端头井和钻孔将地面点位沿同一铅锤线方向投影到地下,最终把地面趋近导线的平面坐标和方位传递到地下隧道施工控制导线上。
如下图2所示,K0、K1为地面趋近导线点;T1、T2分别为地面车站端头井和钻孔井上的投影点;T1´、T2´分别为T1、T2投影到车站端头井和区间隧道底部的投影点,T1´、T2´同时又为地下隧道施工控制导线的起算点;X1、……Xn 为地下隧道施工控制导线点;a1、a2、a3、a4和d1、d2、d3分别为全站仪实测的角度和距离。
一井定向在竖井联系测量中的应用

一井定向在竖井联系测量中的应用摘要本文介绍在竖井联系测量作业过程中采用一井定向方法进行方位角及坐标传递,说明基本操作步骤及计算方法,结合实际情况,阐述三角形联系方法及注意事项。
关键词一井定向联系三角形投点方位角1概述在隧道施工时,经常利用竖井增加作业面,从多面进行隧道施工,提高隧道施工进度。
为了保证施工过程中隧道正确贯通,需要将地面控制网点的坐标、方位角及其高程经由施工竖井传递至地下。
通常对于这项工作我们称之为竖井定向联系测量。
基本原理就是在竖井悬挂两根钢丝,钢丝一端固定在井口上方,另一端系有重锤自由悬挂至井底,利用两根钢丝将地面坐标及方位角传递至井下连接点位,使得地面坐标系与地下坐标系一致;同时利用钢尺将地面高程传递至地下点位高程,确保地面地下高程系统一致。
(如图1)2定向测量工作为了确保定向工作的准确,同时增加检核条件,现就某工程项目采用悬挂三根钢丝的方法进行说明(如图2)。
(1) 布设近井点。
在竖井附近布设平面近井点J01-1,该点与地面精密导线点JM2相互通视,近井点J01-1按照精密导线进行施测,最短边不小于50米,并与地面精密导线组合成附合导线;采用强制对中装置,减少对中误差对竖井上下方位角传递的影响。
(2) 悬挂钢丝在竖井内悬挂三根钢丝至井底。
选择直径0.3mm的钢丝。
悬挂钢丝的过程中在钢丝的合适位置粘贴3-4个反射片,各反射片粘贴时有一定的旋转角度,保证在钢丝静止时总有一面反射片面朝向仪器方向。
在井底处,钢丝下端悬挂10kg 左右重锤,并将重锤置于防止钢丝摆动的阻尼液中,保持钢丝处于静止状态。
(3) 测量距离采用1s级及以上精度的全站仪实测地面近井点J01-1到三根钢丝的距离a、b井下近井点C′到三根钢丝间的距离a′、b1′、b2’;同时利用全站仪的对边测量功能分别测量井上及井下三根钢丝间的距离c1、c2/c1、从‘’值。
测回间的距离较差<1mm。
(4) 测量角度实测C/C′点与两根钢丝间夹角γ/γ′。
竖井联系测量坐标计算表
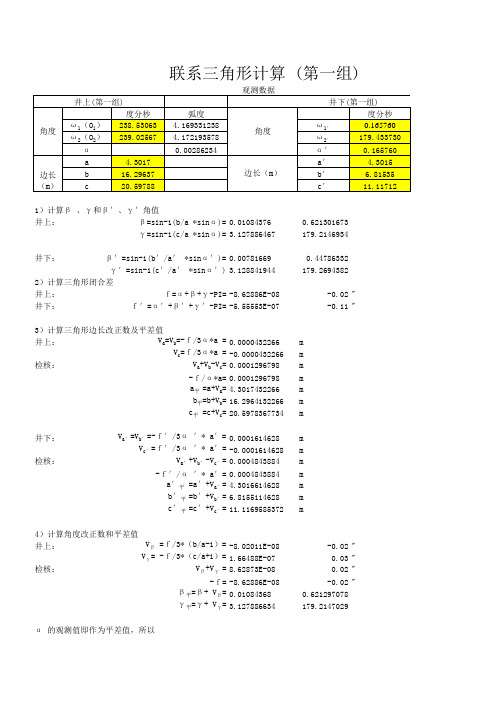
井上:0.010843760.6213016733.127886467179.2146934井下:0.007816690.447863323.128841944179.2694382井上:-8.62886E-08-0.02"井下:-5.55553E-07-0.11"井上:0.0000432266m -0.0000432266m 检核:0.0001296798m 0.0001296798m 4.3017432266m 16.2964132266m 20.5978367734m 井下:0.0001614628m -0.0001614628m 检核:0.0004843884m 0.0004843884m 4.3016614628m 6.8155114628m 11.1169585372m井上:-8.02011E-08-0.02"1.66488E-070.03"检核:8.62873E-080.02"-8.62886E-08-0.02"0.010843680.6212970783.127886634179.2147029-f=β平=β+ V β=γ平=γ+ V γ=α 的观测值即作为平差值,所以c′平 =c′+V c′=4)计算角度改正数和平差值V β =f/3*(b/a-1)=V γ= -f/3*(c/a+1)=V β+V γ =V a′=V b′=-f′/3α ′* a′=V c′=f′/3α ′* a′=V a′+V b′-V c′=-f′/α ′* a′=a′平 =a′+V a′=b′平 =b′+V b′=V a +V b -V c =-f/α*a=a 平 =a+V a =b 平=b+V b =c 平 =c+V c =f=α+β+γ-PI=f′=α′+β′+γ′-PI=3)计算三角形边长改正数及平差值V a =V b =-f/3α*a =V c =f/3α*a =β=sin-1(b/a *sinα)=γ=sin-1(c/a *sinα)=β′=sin-1(b′/a′ *sinα′)=γ′=sin-1(c′/a′ *sinα′)2)计算三角形闭合差联系三角形计算 (第一组)1)计算β 、γ和β′、γ′角值3.141592654井下:-1.08224E-07-0.02"6.63789E-070.14"检核:5.55565E-070.11"5.55553E-070.11"0.0078165810.4478571193.128842608179.26947623.1415926543.668103947210.1668751.55711221889.215958311.55424987889.051958314.709548551269.83725541.57577247990.285112511.57100821590.01214029近井点GJ13:X=13362.9144 Y=14389.8311GJ14X=13192.7498Y=14290.9246DJ 2:13363.1963DJ 1:13363.1840钢丝间距检核:4.301743214实测距离S 3-4:15.49871DJ3:13363.1287DJ4:13363.1254X DJ3=X DJ1+c′平*COSα1-3= Y DJ3=Y DJ1+c′平*SINα1-3=X DJ4=X DJ3+S 3-4*COSα3-4=Y DJ4=Y DJ3+S 3-4*SINα3-4=7)计算坐标已知坐标:解算坐标:X=X A +C 平*COSαA-O2= Y=Y A +C 平*SINαA-O2=X=X A +b 平*COSαA-O1= Y=Y A +b平*SINαA-O1=α13-O1=α2-1=6)推算洞内DJ1-DJ3、DJ3-DJ4 的坐标方位角α1-3=α3-4=α′ 的观测值即作为平差值,所以α′+β′平+γ′平 =5)推算两钢丝连线方向DJ1-DJ2的坐标方位角α13-14=α13-O2=V′β =f′/3*(b′/a′-1)= V′γ= -f′/3*(c′/a′+1)= V′β+V′γ =-f′= β′平=β′+ V′β=γ′平=γ′+ V′γ=α+β平+γ平 =14410.4270 14406.125314417.2421 14432.7408。
竖井传递坐标和高程
竖井传递坐标和高程
把地面上的平面坐标和高程传递到井下、隧道内的测量过程就是所谓的联系测量,地铁工程项目中竖井平面联系测量的方法有多种:支导线传递法、联系三角形法、陀螺仪定向等多种方法。
联系三角形适用于井口比较小,竖井又比较深的情况,联系三角形测量整个流程如下:
1、在竖井悬挂两根钢丝,钢丝间的距离c应尽可能长,宜选用直径为0.3mm钢丝,下端悬挂10kg重锤,重锤应浸没在阻尼液中,在两根钢丝上下适当位置分别贴上反射片。
特别需要注意的是:两根钢丝的方向需与隧道方向一致。
2、测量近井导线点坐标,近井导线最短边长不应小于50米,近井点与精密导线点应构成附和导线或闭合导线。
3、假设全站仪于井口某一导线点上,该导线点与两根钢丝应形成直伸形三角形,联系三角形锐角宜小于1°,近井导线点至悬挂钢丝的最短距离与两根钢丝间距离c的比值宜小于1.5。
4、用全站仪分别测量两根钢丝的反射片,观测量主要是全站仪至两个反射片的平距和水平角,由于距离较短,不需要做相关改正。
5、在井下使用同样方法,架设全站仪于某一导线点上,与两根形成直伸形三角形,几何关系要求同井上的联系三角形。
在井下宜观测两个前视棱镜,以作检核。
6、测量时,竖井旁机械设备应停止运行,并记录气压、温度、湿度等值。
7、数据处理:推算地下定向边的方位角和导线点的坐标,计算井上井下两根钢丝间距离,距离较差应小于2mm。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
井上:0.01084376
0.6213016733.127886467179.2146934井下:
0.00781669
0.447863323.128841944179.2694382
井上:-8.62886E-08-0.02"井下:-5.55553E-07
-0.11"
井上:
0.0000432266m -0.0000432266
m 检核:
0.0001296798m 0.0001296798m 4.3017432266m 16.2964132266m 20.5978367734
m 井下:0.0001614628
m -0.0001614628
m 检核:
0.0004843884
m 0.0004843884m 4.3016614628m 6.8155114628m 11.1169585372
m
井上:
-8.02011E-08-0.02"1.66488E-07
0.03"检核:
8.62873E-080.02"-8.62886E-08-0.02"0.010843680.6212970783.127886634
179.2147029
-f=β平=β+ V β=γ平=γ+ V γ=α 的观测值即作为平差值,所以
c′平 =c′+V c′=
4)计算角度改正数和平差值
V β =f/3*(b/a-1)=V γ= -f/3*(c/a+1)=V β+V γ =V a′=V b′=-f′/3α ′* a′=V c′=f′/3α ′* a′=V a′+V b′-V c′=-f′/α ′* a′=a′平 =a′+V a′=b′平 =b′+V b′=V a +V b -V c =-f/α*a=a 平 =a+V a =b 平=b+V b =c 平 =c+V c =
f=α+β+γ-PI=f′=α′+β′+γ′-PI=
3)计算三角形边长改正数及平差值
V a =V b =-f/3α*a =V c =f/3α*a =β=sin-1(b/a *sin α)= γ=sin-1(c/a *sin α)=β′=sin-1(b′/a′ *sin α′)=γ′=sin-1(c′/a′ *sin α′)
2)计算三角形闭合差 联系三角形计算 (第一组)
1)计算β 、γ和β′、γ′角值
3.141592654
井下:-1.08224E-07-0.02"6.63789E-07
0.14"检核:
5.55565E-07
0.11"5.55553E-07
0.11"0.0078165810.4478571193.128842608
179.2694762
3.1415926543.668103947210.1668751.55711221889.215958311.55424987889.05195831
4.709548551269.83725541.57577247990.285112511.571008215
90.01214029
近井点G J13:X=13362.9144
Y=14389.8311GJ14X=13192.7498
Y=14290.9246
DJ 2:
13363.1963DJ 1:
13363.1840
钢丝间距检核:4.301743214
实测距离(m):
S 3-4:15.49871
DJ3:
13363.1287DJ4:
13363.1254
X DJ3=X DJ1+c′平*COS α1-3=
Y DJ3=Y DJ1+c′平*SIN α1-3=X DJ4=X DJ3+S 3-4*COS α
3-4=Y DJ4=Y DJ3+S 3-4*SIN α
3-4=
7)计算坐标已知坐标:
解算坐标:
X=X A +C 平*COS αA-O2=
Y=Y A +C 平*SIN αA-O2=X=X A +b 平*COS αA-O1= Y=Y A +b平*SIN α
A-O1=
α13-O1=α2-1=6)推算洞内DJ1-DJ3、DJ3-DJ4 的坐标方位角
α1-3=
α
3-4=α′ 的观测值即作为平差值,所以
α′+β′平+γ′平 =5)推算两钢丝连线方向DJ1-DJ2的坐标方位角
α13-14=
α13-O2=V′β =f′/3*(b′/a′-1)= V′γ= -f′/3*(c′/a′+1)= V′β+V′γ =-f′= β′平=β′+ V′β=γ′平=γ′+ V′γ=α+β
平+γ平 =
14410.4270 14406.1253
14417.2421 14432.7408。