PT2240遥控编码芯片
普通对拷遥控器配对方法
普通对拷遥控器配对⽅法
普通对拷型遥控器只要符合下⾯三点要求,即可以2秒内配置好新的遥控器:
1、原遥控能正常使⽤;
2、清楚原遥控器的发射频率
3、原遥控器编码芯⽚型号为:PT2262 PT2264 SC2262 SC2260 HS2262 2260 LX2262 2260
EV1527 PT2240等
注意:对拷遥控器对芯⽚型号及频率要求较为严格,原遥控器芯⽚型号必须符合要求,频率也要求⼀致性,切不可使⽤433频率的对拷遥控器去配430频率的原遥控等情况,频率差距明显,⽆法对拷成功。
对拷的⽅法:
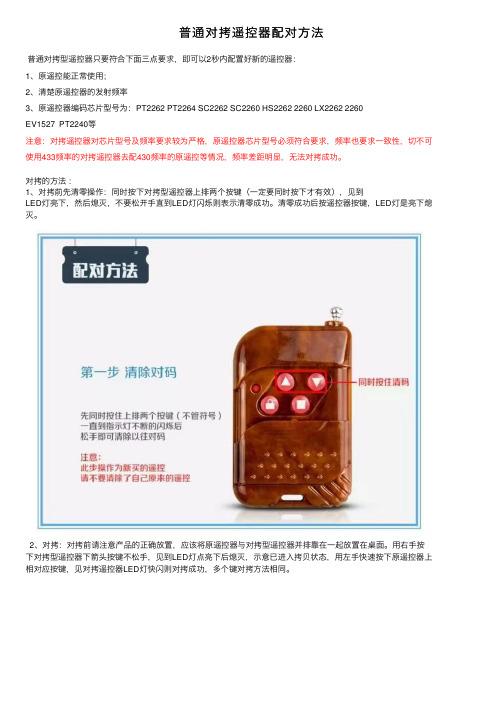
1、对拷前先清零操作:同时按下对拷型遥控器上排两个按键(⼀定要同时按下才有效),见到
LED灯亮下,然后熄灭,不要松开⼿直到LED灯闪烁则表⽰清零成功。
清零成功后按遥控器按键,LED灯是亮下熄灭。
2、对拷:对拷前请注意产品的正确放置,应该将原遥控器与对拷型遥控器并排靠在⼀起放置在桌⾯。
⽤右⼿按下对拷型遥控器下箭头按键不松⼿,见到LED灯点亮下后熄灭,⽰意已进⼊拷贝状态,⽤左⼿快速按下原遥控器上相对应按键,见对拷遥控器LED灯快闪则对拷成功,多个键对拷⽅法相同。
个键不松⼿,见LED灯亮下后熄灭,不松⼿直到LED灯不停闪烁表⽰恢复已经成功了。
对拷遥控器选配和操作说明

对拷遥控器选配和操作说明对拷是指通过对拷遥控器与原遥控器学习,自己加配出新的遥控器。
对拷遥控器使用方便,无需拷贝机,无需拆开外壳,无需跟主机学习对码,跟原来的遥控器对拷后便可直接使用,让您轻松体验到自己动手拷贝遥控器的快乐。
也可将二个遥控器合并为一个遥控器同时使用,可拷贝市面上绝大多数的无线遥控器(家用防盗遥控器、汽车防盗遥控器、摩托车防盗遥控器、电动车防盗遥控器、卷闸门遥控器、车库门遥控器、电动门遥控器等等)。
一、确定是否能用对拷遥控器原遥控正常,芯片兼容,频率正确是必备的三个条件。
购买前先确定你现在在用的遥控器的按键是绝对好的,外观无所谓。
再打开你的遥控器查看芯片型号和频率。
为节省大家的宝贵的时间,请在联系我们之前先抄下您的芯片型号和频率,直接报给我们,我们会为您确认是否能用的。
查看方法:打开您的遥控器外壳,查看里面的线路板:查看一个多脚的黑色元件(8脚或以上),上面印有的文字(英文加数字)就是芯片型号。
固定码遥控器常用芯片有PT2240、PT2240B-S、PT2242、PT2260、PT2262、PT2264、HS2262、SC2262 、HT12D、HT6010、HT6013、HT6014、EV1527、FP527、RF527、SMC918、SMC926、VD5326、VD6026、vd5026-2、MC145026、AX5026等,所有固定码的遥控器都适用。
滚动码或隐藏码的不适用,滚动码遥控器芯片的常用芯片有HSC200、HSC201/HSC300、HSC300等。
查看一个长条形或圆形的银色的元件上面的文字(英文加数字,主要看数字),常见的有NDR315、315、330、433等,各个款式的遥控器可能所处的位置不一样,元器件也可能不同,但都“长”的差不多。
下图为参考实例:二、使用方法所有对拷贝遥控器大致用法都差不多,指示灯快闪说明操作成功。
以下说明如与实际不同,请大家灵活变所有对拷贝遥控器大致用法都差不多,指示灯快闪说明操作成功。
超强新对拷遥控器相关知识

超强新对拷遥控器相关知识
超强新对拷与普通对拷的区别:
目前普通对拷能对拷的芯片范围有:PT2262、PT2264、SC2262、SC2260、HS2262、HS2260、LX2262、LX2260、LX2240、PT2240、EV1527、P527及部份单片机。
而超强对拷能对拷的芯片范围除在普通对拷能对拷的基础上增加了HT系列芯片、SC5262 5326系列芯片SMC918系列芯片、HCS101全部系列、HCS200/HCS201/HCS300/HCS301部分代码。
1、清码方法(与普通对拷不同):
同时按住开锁与关锁两键(有些外壳是上行与下行两键),LED 指示灯闪烁三下,松开按下去的任意一个按键,另一个不松,点击松开的按键三下,LED指示灯进入快速闪烁状态,此时内存的数据全部清除,清完数据之后的遥控器,无论按哪个按键,LED指示灯都是不亮。
2、对拷方法(与普通对拷相同):
一手持原配遥控器,另一手持对拷遥控器,两只遥控器尽量靠近,(理想的是将两个遥控器零距离边靠着边放在桌面上)分别按下所需对拷的按键,LED指示灯快速闪烁三下之后快速闪烁,对拷成功,其他按键操作方法相同。
有些遥控器发射功率较小,应原配遥控器与对拷遥控器背靠背操作,才好对拷。
有些操作环境有干扰的,应避开干扰操作,如果对拷不太好使的,清码以后重新对拷。
提示:
1、使用前对拷遥控器需要清一下码。
2、对拷时,注意看一下原遥控的灯,原遥控分常亮和闪亮。
如果是常亮的,对拷时要一直按住原遥控;如果是闪亮的,要不停点按原遥控。
新遥控一直按住不动,直到灯闪亮,即可。
单片机软件解码(PT2240)
单片机软件解码(PT2240)说明如下:1:利用MCD2及DEMO2:选用PIC16F877A作为软件解码芯片3:单片机时钟频率选用外部4MHZ晶振4:选用外部中断脚作为编码信号脚输入脚5:可解PT2240芯片(8脚的学习型编码芯片编码地址位:2的20次方重复几率100万分之一)6:功能有:遥控器学习(DEMO上的S9作为学习按纽)清除记忆(长按DEMO上的S9即可清除遥控器地址的记忆)7:学习遥控器数量可以设定(可根据EEPROM的大小随便设定)8:输出功能(有三路是单击遥控器双稳,可以通过PORTC上的LED可以看到结果.还有一路是双击遥控器双稳)9:可选用315MHZ/433MHZ的饿超再生/超外差接收模块10:过几天将公布PT2260-PT2262的单片机软件解码资料/************************************************************ ******************//****************************** 遥控器接收程序********************************//************************************************************ ******************/#include#include#define remote_geshu 10/************************************************************ ******************/union BIT_16{int TIMER1_REG;unsigned char REG[2];}union BIT_32{unsigned long data_temp_long;unsigned char data_temp_byte[4];}/************************************************************ ******************/static union BIT_16 TIMER1_TEMP;//16位定时器1static union BIT_32 data_temp;/******************************************************************************/static volatile unsigned char rec_status @ 97;static unsigned char data_cout;//接收的遥控器码位数static unsigned char data;//接收的4位数据static unsigned int h_pulse;//高电平宽度static unsigned int l_pulse;//低电平宽度static unsigned char remote_cout;//遥控器数量static unsigned char remote_numb;//遥控器编号/************************************************************ ******************/static unsigned char TIMER15S1;//清除学习码按键长按时间static unsigned char TIMER15S2;//学习等待时间static unsigned char TIMER15S3;//遥控器数据缓冲时间static unsigned char TIMER15S4;//LED显示时间static unsigned char TIMER15S5;//static unsigned char TIMER15S6;//static unsigned char TIMER15S7;//static unsigned char TIMER15S8;///************************************************************ ******************/static bit head @ ((unsigned)(&rec_status)*8+(0));//同步头标志位static bit learn @((unsigned)(&rec_status)*8+(1));//学习标志位static bit recieved @((unsigned)(&rec_status)*8+(2));//接收完成标志位static bit remote_button_status@((unsigned)(&rec_status)*8+(3));//遥控器按键标志位static bit first_click_status@((unsigned)(&rec_status)*8+(4));//遥控器按键单击标志位/************************************************************ ******************//********************************** 数据接收**********************************//************************************************************ ******************/unsigned char data_read(void){if(h_pulse>l_pulse){if((l_pulse>200)&&(l_pulse<1000)){if(h_pulse<(l_pulse<<2))return 1;//数据为1return 2;//无效的数据}else if(h_pulse {if((h_pulse>200)&&(h_pulse<1000)){if(l_pulse<(h_pulse<<2))return 0;//数据为0}return 2;//无效的数据}}/************************************************************ ******************/void clr_head(void)//清除寄存器{data_cout=0;head=0;}/************************************************************ ******************/#pragma interrupt_level 1void check_data(void)//检测数据是否正确if(head){switch(data_read()){case 0:(data_temp.data_temp_long)<<=1;;data_cout++;break; case1:(data_temp.data_temp_long)<<=1;(data_temp.data_temp_long)++ ;;data_cout++;break;default:clr_head();break;}if(data_cout>23){INTE=0;recieved=1;clr_head();//}}}/************************************************************ ******************/#pragma interrupt_level 1void check_head(void){if((!head)&&(!recieved))//{if((h_pulse>300)&&(h_pulse<1000)){if((l_pulse>h_pulse*27)&&(l_pulse {head=1;}}}}/************************************************************ ******************/#pragma interrupt_level 1void interrupt level_h_l(void){/* if(RAIF)//如果是电平中断{PORTA=PORTA;RAIF=0;//TIMER1_TEMP.REG[0]=TMR1L; TIMER1_TEMP.REG[1]=TMR1H;TMR1H=0;TMR1L=0;if(RA4)//如果是低电平中断{l_pulse=TIMER1_TEMP.TIMER1_REG; check_data();check_head();}else//如果是高电平中断{h_pulse=TIMER1_TEMP.TIMER1_REG; }}*/if(INTF){INTF=0;TIMER1_TEMP.REG[0]=TMR1L;TIMER1_TEMP.REG[1]=TMR1H;TMR1H=0;TMR1L=0;if(INTEDG)//低电平宽度{INTEDG=0;l_pulse=TIMER1_TEMP.TIMER1_REG; check_data();check_head();}else{INTEDG=1;h_pulse=TIMER1_TEMP.TIMER1_REG; }}if(T0IF)//{T0IF=0;TIMER15S1++;TIMER15S2++;TIMER15S3++;TIMER15S4++;TIMER15S5++;TIMER15S6++;TIMER15S7++;TIMER15S8++;}}/************************************************************ ******************//********************************* 遥控器学习*********************************//************************************************************ ******************/void clr_learn_reg(void){unsigned char n;di();for(n=1;n==remote_cout*4;n++){eeprom_write(n,0);}eeprom_write(70,0);eeprom_write(71,0);ei();}/************************************************************ ******************/unsigned char compare_data(unsigned char eep_addr){unsigned char n;union BIT_32 addr_data;for(n=0;n<4;n++){addr_data.data_temp_byte[n]=eeprom_read(eep_addr+n);}if((data_temp.data_temp_long&0x00fffff0)==(addr_data.data_tem p_long&0x00fffff0)){return 1;//地址匹配返回1}return 0;//地址不匹配返回0}/************************************************************ ******************/unsigned char compare_all_data(void){unsigned char n;for(n=0;n {if(compare_data(n*4+1))//如果有相同的遥控器{return 1;}}return 0;//没有一个地址是相同的}/************************************************************ ******************///读遥控器的数量void read_remote_cout(void){remote_cout=eeprom_read(71);//读出已经学习的遥控器总数量if(remote_cout>20)remote_cout=0; //如果EEPROM是空的则为0}/************************************************************ ******************/void check_learn_pro(void){unsigned char n;if(learn){learn=0;remote_numb=eeprom_read(70);//读出现在可以覆盖掉哪个遥控器的编号read_remote_cout();////读遥控器的数量if(remote_numb>(remote_geshu-1))remote_numb=0;//如果遥控器的编号已经是最大的了则从小开始if((remote_cout==0)||!compare_all_data())//如果还没有遥控器学习或没有相同地址的遥控器学习{di();for(n=0;n<4;n++){eeprom_write(remote_numb*4+n+1,data_temp.data_temp_byte[n]); }remote_numb++;if(remote_cout eeprom_write(71,remote_cout);//保存已经学习好的遥控器总数量eeprom_write(70,remote_numb);//保存已学习的遥控起编号}}}/************************************************************ ******************/void check_out_pro(void){read_remote_cout();//读遥控器的数量if(compare_all_data()){data=data_temp.data_temp_byte[0]&0x0f;//TIMER15S3=0;TIMER15S4=0;RC4=1;}}/************************************************************ ******************/void decode_init(void)//接收初始化{OPTION=0x87;TMR0=0;T0IE=1;//使能定时器0中断INTE=1;TMR1ON=1;//PORTC=0x00;//TRISC=0x00;//ei();//开放全局中断}/************************************************************ ******************/void check_remote_recieved(void)//检测有无新的数据{if(!RB1)//{if(TIMER15S1>30)//是否长按了3秒{learn=0;//clr_learn_reg();RC4=0;}elselearn=1;//TIMER15S2=0;TIMER15S4=0;RC4=1;}}else{TIMER15S1=0;if(TIMER15S2>60){learn=0;//}}if(TIMER15S3>2)//数据保持时间{data=0;TIMER15S3=0;}if(TIMER15S4>3)//LED显示时间RC4=0;}if(recieved){TIMER15S3=0;recieved=0;TIMER15S4=0;RC4=1;check_learn_pro();check_out_pro();}INTE=1;}/************************************************************ ******************//********************************* 控制部分程序*******************************//************************************************************ ******************/void control_init(void);}/************************************************************ ******************//*********************************声音部分程序*********************************//************************************************************ ******************//************************************************************ ******************/unsigned char delay(unsigned int nus){for(;nus>0;nus--){if(recieved==1) return 0;asm("nop");}}/************************************************************ ******************/unsigned char soud_one_fre(unsigned int cout,unsigned int delay_time)//发音程序{if(recieved==1) return 0;INTE=0;for (;cout>0;cout--){RC6=!RC6;delay(delay_time);}RC6=0;INTE=1;}/************************************************************ ******************//*********************************急促的声音***********************************//************************************************************ ******************/unsigned char soud_one_fre0(unsigned int time,unsigned int delay_time){for (;time>0;time--){if(recieved==1) return 0;soud_one_fre(1000,10);delay(delay_time);}}/************************************************************ ******************//*********************************救护的声音***********************************//************************************************************ ******************/unsigned char soud_tow_fre0(unsigned int time)//{for (;time>0;time--){if(recieved==1) return 0;soud_one_fre(900,10);soud_one_fre(800,30);}}******************//************************************低-高音***********************************//******************************************************************************/unsigned char soud_many_fre0(unsigned int time,unsigned int cout) {for (;time>0;time--){unsigned int delay_time;for(delay_time=50;delay_time>10;delay_time--){if(recieved==1) return 0;soud_one_fre(cout,delay_time);}}}/******************************************************************************//************************************低-高音1**********************************/******************/unsigned char soud_many_fre2(unsigned int time,unsigned int cout) {for (;time>0;time--){unsigned int delay_time;for(delay_time=30;delay_time>20;delay_time--){if(recieved==1) return 0;soud_one_fre(cout,delay_time);}}}。
遥控器芯片型号

遥控器芯片型号遥控器芯片是一种集成电路,用于接收和解码遥控器发送的信号并控制相应的设备。
下面将介绍几种常见的遥控器芯片型号。
1. PT2262/PT2272:PT2262是一种编码芯片,而PT2272是一种解码芯片。
这对芯片组是很常见的遥控器芯片,可用于控制家电、汽车门禁系统等。
它们使用了Amplitude Shift Keying (ASK) 调制技术,通过编码和解码来实现信号传输和控制。
2. HT12E/HT12D:HT12E是一个编码器芯片,而HT12D是一个解码器芯片。
这种芯片组也是常见的遥控器芯片,广泛应用于无线遥控领域。
它们采用了Holtek公司独特的自适应编码技术,能够提供可靠的无线控制功能。
3. EV1527:EV1527是一种单芯片编码和解码器,广泛应用于家电遥控器、汽车防盗系统等领域。
它可以支持多种调制方式,包括FSK (Frequency Shift Keying)、AM (Amplitude Modulation)等。
EV1527具有低功耗、高稳定性和高抗干扰能力的特点。
4. RX-2B/TX-2B:RX-2B是一个解码器芯片,而TX-2B是一个编码器芯片。
它们是一对非固定代码的遥控器芯片,可用于无线遥控开关、门禁系统等。
它们采用了OOK (On-Off Keying)调制技术,能够实现简单可靠的无线控制功能。
5. SC2260/SC2262:SC2260是一个编码器芯片,而SC2262是一个解码器芯片。
这一对芯片由Silan Microelectronics公司开发,可用于无线遥控开关、智能家居系统等。
它们采用ASK调制技术,具有高灵敏度和抗干扰能力。
以上仅为常见的几种遥控器芯片型号,市场上还有其他许多型号和厂家可供选择。
选择合适的遥控器芯片型号需要考虑应用场景、系统要求和个人需求等因素。
学习型无线解码芯片SK212(SK202升级版)代替PT2272,可解码PT2262和EV1527

自学习型无线解码芯片SK212主要特性:☆兼容市面大多数固定码编码芯片:如PT2262、PT2242、EV1527等☆集锁存、暂存、互锁、翻转四种功能一体,通过跳线选择☆支持PT2262(三态地址码)和EV1527(20位地址码)遥控器混合学习☆支持4位数据码的输出,并且有VT输出☆内置高精度振荡器,不需外接晶振☆自动适应发射端振荡电阻☆智能学习,无需手工编码☆内置存储器,更安全更可靠☆最多支持39个遥控器学习☆超宽工作电压:2.6-5.5V☆工业温度范围:-40~85℃☆低工作电流:≈3mA☆提供SOP14L封装一、SK212引脚功能说明引脚名称功能说明1 GND 电源负极2 KEY 学习按键输入,通过按键与GND连接3 VT 解码有效输出口,解码有效时输出高电平4 D0 数据输出端D05 D1 数据输出端D16 D2 数据输出端D27 D3 数据输出端D38 NC 悬空,待扩展9 NC 悬空,待扩展10 LED 学习状态指示灯11 M1 输出模式选择M1(内置上位电阻)12 M2 输出模式选择M2(内置上位电阻)13 RF RF信号输入端,接到无线接收模块的DA TA14 VCC 电源正极,2.6-5.5V供电二、应用电路输出模式说明:模式 M1 M2 说明锁存HH对应的输出端输出高电平并一直保持,支持15种输出状态 通过判断VT 识别有效信号暂存 H L对应的输出端输出高电平,在停止发射后恢复低电平,支持15种输出状态翻转 L H每按一次发射按钮,对应的输出端输出状态翻转一次,只支持4按键遥控器的单按键操作互锁 L L对应的输出端输出高电平并一直保持,只支持4按键遥控器的单按键操作,D0-D3输出只有一个高电平三、操作说明1、学习EV1527编码遥控器:按下学习按键1次,学习状态灯常亮,进入学习遥控编码状态,此时按下遥控器上任意按键,学习状态灯快速闪2下,表示学习成功。
对于已经学习过的遥控器,无法再次学习。
教您配置各类无线遥控器的方法

教您配置各类无线遥控器的方法先我们来了解下现在市场上常用的遥控器类型:最简单不过的可以通过IC来辨别固定码无线遥控器:常见使用IC有PT2262、PT2264、SC2262、SC2260、HS2262、LX2262等学习码无线遥控器:常见使用IC有EV1527PT2240、EV527、SC1527等滚动码无线遥控器:常见使用IC有HSC301、201等下面我们来讲讲这三者遥控器之间的区别(小弟是做销售的只能站在销售的角度分析这问题)三种遥控器之间的区别在于:遥控器之间的编的地址码不同,安全保密性不同。
固定码无线遥控器:只能编6561种编码学习码无线遥控器:常见的学习码芯片都有百万组不同的编码滚动码无线遥控器:地址编码不可能重复下面就来讲讲配置方法吧方法1配置固定码的方法很简单只要现配遥控器与原配遥控器参数相同就能有效控制对应接收。
参考上图1、遥控器的发射频率要相同2、遥控器的编码IC要相同或相近3、遥控器的振荡电阻要达到最佳匹配效果4、遥控器地址编码要一至5、数据位要相同方法2目前我工厂已批量生产了“自拷型无线遥控器”只要考虑发射频率就可以,其它一概不用考虑(这里针对固定码或大部份学习码而言),只要您原配遥控器是好的,想增配遥控器我们几秒就可给您搞定,方便快捷。
方法3如您时间很忙或对电子产品不很熟悉,那么只要您提供遥控器正反面及外壳清晰的图片给我们,我们可以参照您原来遥控器,给您配置相同效果的遥控器,为您节省保贵的时间。
概述我公司设计制造的华方快速拷贝型无线遥控器,可方便快拷市场上常用的固定码遥控器、学习码遥控器如电动门遥控器、道闸遥控器、卷帘门遥控器、车库门遥控器、平移门遥控器、各类电动车、摩托车、家庭防盗报警遥控器等。
仅需几秒钟就可以轻松给您解决配机难题。
下面我们当然应该了解下自拷型的遥控器啦一、技术参数1、本产品可拷贝的IC型号有2262226015272240及兼容IC等。
2、无需考虑震荡电阻,本产品会自动兼容震荡电阻。
杭州正芯微电子 LX2240B习码编码 IC 说明书
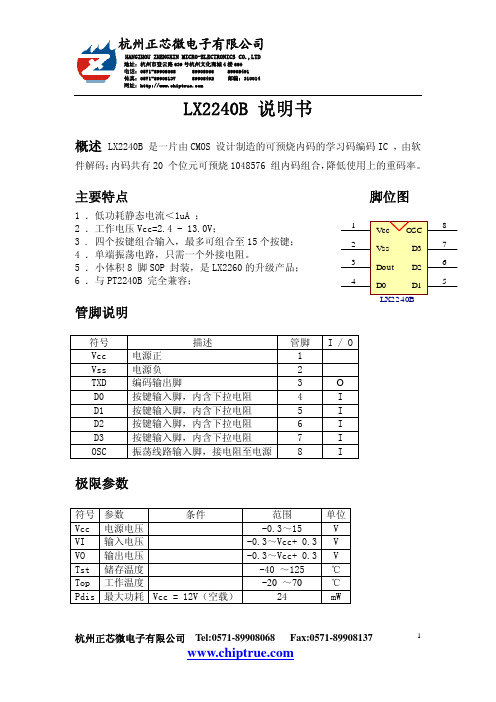
网址:LX2240B 说明书概述LX2240B 是一片由CMOS 设计制造的可预烧内码的学习码编码IC ,由软件解码;内码共有20 个位元可预烧1048576 组内码组合,降低使用上的重码率。
2 .工作电压3 . 四个按键组合输入,最多可组合至155 .小体积8 脚SOP 封装,是LX2260的升级产品;6 .与PT2240B 完全兼容;管脚说明符号描述管脚I / OVcc电源正1Vss电源负2TXD编码输出脚3 OD0按键输入脚,内含下拉电阻4ID1按键输入脚,内含下拉电阻5ID2按键输入脚,内含下拉电阻6ID3按键输入脚,内含下拉电阻7IOSC振荡线路输入脚,接电阻至电源8I极限参数符号 参数 条件范围单位Vcc 电源电压-0.3~15VVI 输入电压-0.3~Vcc+ 0.3VVO 输出电压-0.3~Vcc+ 0.3VTst 储存温度-40 ~125℃Top 工作温度-20 ~70 ℃Pdis 最大功耗 Vcc = 12V(空载)24mW传真:0571-******** 89908492 邮编:310014 网址:电气特性参数 条件符号最小典型最大 单位 工作电压Vcc 2.412 15 V 静态电流Vcc = 12V,OSC stop ,OutPut UnloadedIsb1.0uA 工作电流Vcc = 12V ,一个按键输入(一个按键接Vcc)Iop 0.5 1.0mA驱动拉电流 Vcc = 12V,Voh = 6V Ioh 5 mA驱动灌电流 Vcc = 12V,Vol = 6V Iol 3 mA 工作频率Fop80K Hz输出编码的格式定义:1个CLK=8个 OSC CLOCK内码C0~C19(100万组)D0 D1 D2 D3 同步码网址:振荡电阻和1位数据宽度(TD)对应表13V 12V 11V 10V 9V 8V 7V 6V 5V 4V 1M 605us 620us 640us 655us 675us 704us 736us 780us 844us 944us 1.2M 792us 814us 834us 854us 876us 914us 956us 1.015ms 1.09ms 1.225ms 1.5M 960us 980us 1.01ms 1.03ms 1.06ms 1.1ms 1.145ms 1.23ms 1.32ms 1.47ms 2M 1.22ms 1.25ms 1.28ms 1.31ms 1.35ms 1.39ms 1.46ms 1.54ms 1.65ms 1.85ms 2.2M 1.31ms 1.34ms 1.37ms 1.41ms 1.45ms 1.5ms 1.57ms 1.66ms 1.79ms 1.99ms 2.4M 1.43ms 1.48ms 1.51ms 1.55ms 1.59ms 1.64ms 1.71ms 1.81ms 1.94ms 2.19ms 2.7M 1.68ms 1.71ms 1.75ms 1.79ms 1.84ms 1.91ms 1.99ms 2.11ms 2.27ms 2.53ms 3M 1.79ms 1.82ms 1.86ms 1.91ms 1.96ms 2.03ms 2.11ms 2.24ms 2.401ms 2.69ms 3.3M 1.995ms 2.035ms 2.085ms 2.135ms 2.195ms 2.265ms 2.365ms 2.505ms 2.705ms 3.01msLX2240B与PT2240B之间振荡电阻的替换关系(仅供参考):PT2240B LX2240B3.3M 2.4M3.0M 2.2M2.7M 2.2M2.0M 1.5M1.5M 1.2M传真:0571-******** 89908492 邮编:310014 网址:K0~K3按键组合与输出关系表应用线路图K3 K2 K1 KO D3 D2 D1 DO O O O 1 O O O 1 O O 1 O O O 1 0 O O 1 1 O O 1 1 O 1 O O 0 1 O O O 1 O 1 0 1 O 1 O 1 1 O 0 1 1 0 O 1 1 1 0 1 1 1 1 0 0 0 1 0 0 0 1 0 0 1 1 0 0 1 1 0 1 0 1 0 1 0 1 0 1 1 1 0 1 1 1 1 0 0 1 1 0 0 1 1 0 1 1 1 0 1 1 1 1 0 1 1 1 0 11111111。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
簡介
PT2240是一顆可程式化的編碼遙控IC(Remote Control encoder IC),輸出可配合射頻模組(RF modulation)來發射,PT2240最多有222個位址(Address),可經由程式化後,將IC內部之Fuse燒斷,則可發射出客戶所編的碼,PT2240之資料腳位(Data Pin)有2~8個,可由客戶選擇。
功能
CMOS製程技術
低功率消耗
抗雜訊之能力高
最多提供222組位址
最多可有8個資料腳位(Data pin)
工作電壓範圍:1.8~15伏特
單腳位振盪線路
應用範圍
汽車防盜系統
車庫門之控制系統
家庭防盜自動化系統
遙控玩具
工業用遙控
腳位圖
PT2240 (16 PINS)
VSS
VPG PGM VDD DOUT OSC
D1/CODE D0/CLK
PT2240 (8 PINS)
VSS PGM D2VDD DOUT OSC
D1/CODE D0/CLK
PT2240-D3 (8 PINS)
註:此二極體的用意在於保護IC不受到電池接反,而導致IC毀壞,因此建議將此二極體加入電路中。
訂購資訊
產品編號包裝型式正印Address Codes PT2240-D3 8 Pins, DIP (300mil) PT2240-D3 Programmable PT2240P-D3 8 Pins, DIP (300 mil) PT2240P-D3 Programmed
PT2240-D3S 8 Pins, SOP (150 mil) PT2240-D3S Programmable PT2240P-D3S 8 Pins, SOP (150 mil) PT2240P-D3S Programmed
PT2240 8 Pins, DIP (300 mil) PT2240 Programmable
PT2240-S 8 Pins, SOP (150 mil) PT2240-S Programmable PT2240P 8 Pins, DIP (300 mil) PT2240P Programmed
PT2240P-S 8 Pins, SOP (150 mil) PT2240P-S Programmed
PT2240-16 16 Pins, DIP (300 mil) PT2240-16 Programmable PT2240-16S 16 Pins, SOP (150 mil) PT2240-16S Programmable PT2240P-16 16 Pins, DIP (300 mil) PT2240P-16 Programmed
PT2240P-16S 16 Pins, SOP (150 mil) PT2240P-16S Programmed。