微电机控制电路
无感无刷电机控制电路知识点
无感无刷电机控制电路知识点
无感无刷电机控制电路是一种常见的电机控制方案,其特点是具有高效、低噪音和可靠性强等优点。
下面将从控制原理、电路设计和应用场景三个方面进行介绍。
一、控制原理
无感无刷电机控制电路的核心是通过传感器检测电机转子位置,然后按照一定的算法控制电流进行驱动。
与传统的有刷电机相比,无感无刷电机不需要刷子与转子直接接触,大大减少了摩擦和磨损,提高了电机的寿命和稳定性。
二、电路设计
无感无刷电机控制电路通常由功率电路和控制电路两部分组成。
功率电路主要包括电机驱动芯片、功率管和滤波电路等,用于将控制信号转化为电机驱动所需的高电流和高电压。
控制电路主要由微控制器或数字信号处理器组成,负责接收传感器反馈信号、计算电机的转子位置和速度,并实时调整电流输出,控制电机的运行状态。
三、应用场景
无感无刷电机控制电路在众多领域有着广泛的应用。
在家电领域,它常用于空调、洗衣机和冰箱等产品中,可实现高效、节能的运行。
在工业自动化领域,无感无刷电机控制电路广泛应用于机器人、传送带和自动化生产线等设备中,提高了生产效率和精度。
此外,无感无刷电机控制电路还被应用于电动车、无人机等交通工具中,以
提供高效、稳定的动力输出。
总结:无感无刷电机控制电路是一种高效、低噪音、可靠性强的电机控制方案。
通过传感器检测电机转子位置,控制电路实时调整电流输出,实现对电机的精确控制。
该技术在家电、工业自动化和交通工具等领域具有广泛的应用前景。
无刷直流电机专用控制集成电路MC33035的原理及应用
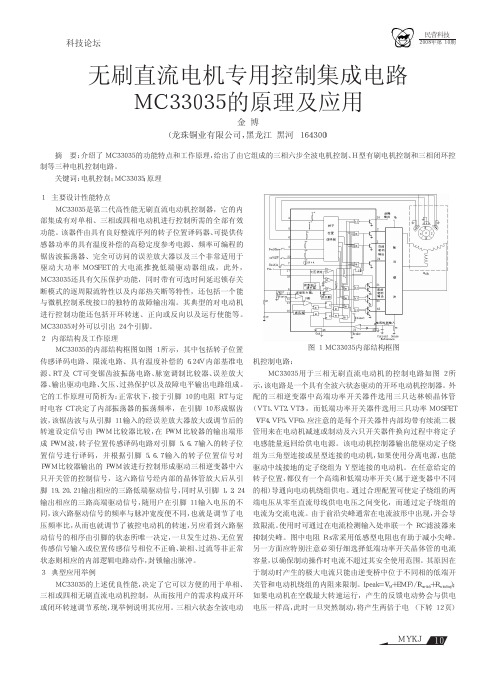
它的工作原理可简析为:正常状下,接于引脚 10 的电阻 RT 与定 配的三相逆变器中高端功率开关器件选用三只达林顿晶体管
时电容 CT 决定了内部振荡器的振荡频率,在引脚 10 形成锯齿 (VT1、VT2、VT3),而低端功率开关器件选用三只功率 MOSFET
波,该锯齿波与从引脚 11 输入的经误差放大器放大或调节后的 (VF4、VF5、VF6)。应注意的是每个开关器件内部均带有续流二极
发展规划,找出本企业在投入、产出方面存在的问题,并参考给
1806.
出的模型计算结果和投影结果增加或减少相关的投资,也可以 [3] 毛世平.技术效率理论及其测度方法[J].农业技术经济,1998
利用给出的方法,计算未讨论的投入、产出指标配置是否合理, (3):37- 41.
计算出合理的指标值,研究提高本企业技术效率的对策和措施, [4] 王丽,魏煜.企业效率研究方法比较[J].预测,1999(5):76- 79.
或闭环转速调节系统,现举例说明其应用。三相六状态全波电动 电压一样高,此时一旦突然制动,将产生两倍于电 (下转 12 页)
MYKJ 10
科技论坛
民营科技 2008 年第 10 期
角股钢丝绳,钢丝绳直径 Φ18mm,钢丝直径 Φ0.95mm,钢丝绳单 Φ1600mm 天轮,其直径也符合《金属非金属矿山安全规程》的要
900mm 的绞车在卷筒直径和宽度上都可满足需要。天轮采用
化管理委员.金属非金属矿山安全规程[S].2006.
(上接 10 页) 动机正常电流的极大电流,这一点尤其应当注 意。
图 2 三相六步全波电机控制电路图 另一方面,转子位置检测信号还被送入 MC33039 经 F/V 转 换,得到一个频率与电机转速成正比的脉冲信号,该信号通过简 单的阻容网络滤波后形成转速反馈信号。利用 MC33035 中的误 差放大器可构成一个简单的 P 调节器,实现电机转速的闭环控
4种直流电机控制电路详解,含图
4种直流电机控制电路详解,含图含公式,直观又细致,不懂都难!旺材电机与电控2小时前私信“干货”二字,即可领取138G伺服与机器人专属及电控资料!直流电机在家用电器、电子仪器设备、电子玩具、录相机及各种自动控制中都有广泛的应用。
但对它的使用和控制,很多读者还不熟悉,而且其技术资料亦难于查找。
直流电机控制电路集锦,将使读者“得来全不费功夫”!在现代电子产品中,自动控制系统,电子仪器设备、家用电器、电子玩具等等方面,直流电机都得到了广泛的应用。
大家熟悉的录音机、电唱机、录相机、电子计算机等,都不能缺少直流电机。
所以直流电机的控制是一门很实用的技术。
本文将详细介绍各种直流电机的控制技术。
直流电机,大体上可分为四类:第一类为有几相绕组的步进电机。
这些步进电机,外加适当的序列脉冲,可使主轴转动一个精密的角度(通常在1.8°--7.5°之间)。
只要施加合适的脉冲序列,电机可以按照人们的预定的速度或方向进行连续的转动。
步进电机用微处理器或专用步进电机驱动集成电路,很容易实现控制。
例如常用的S A A l027或S A A l024专用步进电机控制电路。
步进电机广泛用于需要角度转动精确计量的地方。
例如:机器人手臂的运动,高级字轮的字符选择,计算机驱动器的磁头控制,打印机的字头控制等,都要用到步进电机。
第二类为永磁式换流器直流电机,它的设计很简单,但使用极为广泛。
当外加额定直流电压时,转速几乎相等。
这类电机用于录音机、录相机、唱机或激光唱机等固定转速的机器或设备中。
也用于变速范围很宽的驱动装置,例如:小型电钻、模型火车、电子玩具等。
在这些应用中,它借助于电子控制电路的作用,使电机功能大大加强。
第三类是所谓的伺服电机,伺服电机是自动装置中的执行元件,它的最大特点是可控。
在有控制信号时,伺服电机就转动,且转速大小正比于控制电压的大小,除去控制信号电压后,伺服电机就立即停止转动。
伺服电机应用甚广,几乎所有的自动控制系统中都需要用到。
微型电机噪音控制方法
微型电机噪音控制方法
微型电机在工作过程中可能产生噪音,噪音控制对于提高产品质量和用户体验非常重要。
以下是一些常见的微型电机噪音控制方法:
1.选用低噪音设计的电机:
•在购买微型电机时,选择具有低噪音设计的产品。
某些制造商专注于降低电机噪音水平,并提供低噪音型号。
2.减小电机负载:
•适当选择电机的负载,避免超负荷工作,以减小电机振动和噪音。
3.使用减振装置:
•安装减振装置,如橡胶垫或减震脚,来减缓电机振动的传播,从而减少噪音。
4.优化电机安装位置:
•确保电机安装在结构坚固、稳定的位置上,以减少振动传递到周围结构。
5.改善电机齿轮系统:
•如果微型电机使用了齿轮系统,确保齿轮的设计和制造质量良好,以减少齿轮传递噪音。
6.使用隔音材料:
•在电机周围使用隔音材料,如吸音泡沫或隔音罩,以吸收或隔离噪音。
7.优化电源电路:
•使用电源滤波器和稳压器,以减少电流波动和噪音。
8.改善轴承和润滑:
•保持电机轴承良好的状态,并使用适当的润滑剂,以减少摩擦和振动。
9.采用脉宽调制(PWM)控制:
•使用PWM技术来控制电机速度,这可以降低噪音水平。
PWM控制可以提供更平稳的电机运行。
10.定期维护:
•定期检查和维护电机,确保所有零部件都在良好状态。
损坏的零部件可能导致噪音问题。
在实施这些方法时,需要根据具体的电机类型和应用场景来进行调整。
如果您不确定如何进行噪音控制,建议咨询专业的电机工程师或声学工程师的意见。
基于STM32的微型步进电机驱动控制器设计

3.2 控制器控制策略
STM32软件负责该模块的主控制器,首先让启动模式处于非启动状态(DISABLE),外部中断也处于关闭状态。一旦启动模式被打开,即点亮LED;其次,进行速度设置、细分系数设置以及旋转角度设置。睡眠模式下LED缓慢闪烁。具体该驱动控制器软件设计流程图。
4 结论
通过系统对软硬件进行调试,该控制器实现了对步进电机速度、细分系数、任意角度的设置,并达到了预期设定的目标。此控制器可以应用在相对比较精细的项目控制中,加快项目研发周期。该模块的主要缺陷就是输出驱动电流不够大,无法应用在扭力比较大的场合中,因此,通过上述对A4988模块的分析,可以再对A4988芯片进行改进,更换导通电阻小、驱动电流大的MOS管,实现电机驱动器的设计。
1.2 A4988的工作原理
为了更加清晰地分析A4988的工作原理,首先深入分析A4988的内部结构。为A4988的内部结构图和典型的外部电路连接图。
由图1所示,A4988有一个编译器(Translator),主要负责微控制器和驱动电路的信息交互。通过该编译器可产生DA信号,配合比较器辅助PWM锁存器修复衰减信号,并且该编译器能够产生逻辑电平控制逻辑控制器,逻辑控制器再配合电流调节器和N型MOS管驱动电压共同驱动两路全桥电路。电路中所标电容必须严格与技术文档中所给的相同,Rosc主要更改并修复衰减模式,接VDD自动修复衰减,接GND电流衰减设置为增减电流同时修复。SENSE1和SENSE2检测驱动输出电压,实则是实时检测输出电流,供电流调节器调节输出电流信号,形成闭环控制。因此SENSE1和SENSE2管脚连接的电阻非常关键,一般这个电阻的阻值在零点几欧姆左右。
(1)串口通信模块[6]:主要负责上位机和下位机通信。上位机通过串口通信模块发送相应的功能指令给下位机,下位机执行上位机的指令并控制A4988驱动器模块驱动步进电机。。
两相无刷电机驱动电路
两相无刷电机驱动电路无刷电机是一种高效、可靠且具有良好控制性能的电机。
无刷电机驱动电路是控制无刷电机正常运行的关键。
本文将详细介绍无刷电机驱动电路的原理、设计和调试方法,旨在帮助读者快速学习和掌握无刷电机驱动技术。
无刷电机驱动电路通常由三部分组成:功率电子器件驱动、电机定位反馈和控制器。
下面将对每个部分进行详细讲解。
1. 功率电子器件驱动:无刷电机的转子上有多个永磁体,通过通电与驱动电流相互作用产生转矩。
为了使电机能够正常工作,需要通过电子器件将直流电转换为交流电,并将电流施加到正确的绕组上。
常见的功率电子器件有MOSFET和IGBT,它们能够承受高电压和高电流,并具有快速开关速度和低导通电阻等特性,以便有效地传递能量给电机。
2. 电机定位反馈:无刷电机需要准确的转子位置信息才能实现精确控制。
为了获取转子位置,通常使用霍尔效应传感器或编码器来检测磁力或光信号。
这些传感器将转子位置信息反馈给控制器,以便根据需求调整电机的转速和转向。
3. 控制器:控制器是无刷电机驱动电路的大脑,负责接收转子位置反馈信号,并根据设定值计算和控制电机的运行状态。
控制器一般采用现代数字信号处理器(DSP)或微控制器(MCU),具有高性能的处理能力和丰富的接口功能。
通过控制器,用户可以灵活地调整电机的转速、角度和加速度等参数,实现精确的运动控制。
在进行无刷电机驱动电路的设计和调试时,需要注意以下几点:1. 功率器件选型:合理选择功率器件的规格和参数,根据电机的功率需求和工作环境确定适当的电压和电流。
2. 电路保护:由于无刷电机通常工作在恶劣的环境下,需要考虑电路的安全性和稳定性。
采用过流、过压、过温等保护电路,以确保电机和电路的安全可靠。
3. 控制算法:根据具体应用需求,选择合适的控制算法来实现电机的精确控制。
常用的控制算法包括PID调节器、电流环控制和速度环控制等。
4. 系统稳定性:在调试过程中,需要进行系统参数调优和控制参数调整,以确保系统的稳定性和性能。
驱动伺服电机的电路设计

驱动伺服电机的电路设计伺服电机是一种精密的电动执行器,通常用于需要高精度位置控制的应用中,如工业机器人、数控机床、航空航天设备等。
为了实现对伺服电机的精确控制,需要设计一个高性能的电路来驱动它。
在伺服电机的电路设计中,最常用的驱动方式是采用PWM(脉冲宽度调制)技术。
PWM技术通过控制电路输出的脉冲宽度来调节电机的转速和位置,从而实现对电机的精确控制。
一般来说,伺服电机的驱动电路包括功率放大器、滤波电路、反馈电路和控制电路等部分。
首先,功率放大器是伺服电机驱动电路的核心部分,它负责将控制信号转换为电机驱动信号,通常采用功率晶体管或功率MOSFET等器件来实现。
这些器件需要具有高速开关能力和较大的电流承受能力,以确保电机能够快速响应并具有足够的输出功率。
其次,滤波电路用于平滑输出信号,并去除电路中的高频噪声,以保证电机运行时的稳定性和精度。
另外,反馈电路是伺服电机驱动电路中至关重要的一部分,它负责接收电机位置和速度的反馈信号,并将其与控制信号进行比较,从而实现闭环控制。
常用的反馈传感器包括编码器、霍尔传感器等,通过这些传感器可以实时监测电机的运行状态,并及时调整控制信号,以实现对电机的精确控制。
最后,控制电路通常采用微控制器或数字信号处理器(DSP)来实现,它负责生成PWM信号,并根据反馈信号调整输出信号的占空比,以实现对电机的精确控制。
总的来说,驱动伺服电机的电路设计需要综合考虑功率放大器、滤波电路、反馈电路和控制电路等多个方面的因素,以确保电机能够稳定、精确地运行。
随着电子技术的不断发展,新型的驱动电路设计方案也在不断涌现,为伺服电机的应用带来了更多的可能性。
电动窗帘电路图大全(八款交流直流自动电动窗帘电路原理图详解)

电动窗帘电路图大全(八款交流直流自动电动窗帘电路原理图详解)一、遥控交流电机正反转电路该装置发射/接收部分改用T966/T988多路无线发收模块。
发射部分采用T966两键式发射器成品,接收部分工作原理见图。
接通电源,IC2被复位,Q1、Q2输出低电平,T1、T2截止,J1、J2不吸合,电机M不工作,窗帘停止不动。
按动遥控发射键C,此时ICO的C端输出高电平,D1截止,IO端输出的高电平经IC1-1、IC1-2整形送入IC2-1的CPI端,使Q1翻转输出高电平,T1导通,J1吸合,电机正转,窗帘合上。
若再次按动发射键C,则Q1再次翻转输出低电平,J1释放,窗帘停止运动。
若在电机正转时,窗帘合上过程中,按动发射键D,同样D2截止,IO端输出的高电平经IC1-3、IC1-4整形送入IC2-2的CP2端,并通过D3使IC2-1的R1端呈现高电平,IC2-1被强制复位,J1释放。
同时Q2翻转输出高电平,T2导通,J2吸合,电机反转,窗帘打开。
同样,再次按动D键,Q2再次翻转输出低电平,窗帘停止运动。
如此通过两键可任意实现窗帘的打开、合上、停止,非常方便。
二、遥控直流电机正反转电路工作原理电源变压器B、桥式整流堆和电容C1组成12V 直流电源。
继电器J1、J2 和行程开关K1、K2组成互锁电源极性切换电路。
当按下按钮QA时,220V 交流电接通,指示灯L点亮,由于C2 的存在,J1两端的电压不能突变,故J2 优先吸合,J2-1闭合,电路自保,J2-2 断开,电路5 锁,J2-3、J2-4 闭合,电机得电正转,窗帘开启。
窗帘完全开启后,行程开关K2 被拉线拉动而断开,J2 失电释放,J2-1断开,整个电路断电停i止工作。
窗帘完全开启后,再次按下QA 时,由于K2 断开,J2 不能吸合,J1吸合,J1-1闭合,电路自保,指示灯L点亮,J1一2断开,电路互锁,J1-3、J1-4 闭合,电机得电反转,窗帘闭合。
窗帘完全闭合后,行程开关K1被拉线拉动而断开,J1失电释放,J1-1断开,整个电路断电停止工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课题三 微电机控制电路
微电机控制电路使用1块CMOS集成电路、2只晶体管、2只电阻和1个双刀三掷开关,电路原理如图3-1所示。
通过拨动转换开关K,它可以对直流电机实现正转、停止和反转的控制。
该电路可以广泛用于电动玩具(如电码汽车)或日常用具(如电动窗帘)等,若配上遥控发射和接受电路,还可以实现对玩具和窗帘等的遥控。
一、工作原理
与非门G1A、G1B的输出端(分别为集成电路6脚和9脚)分别与两个晶体管的集电极相连接,作为电路的输出端接接至微型电机的两个输入端。
与非门G1A的输入端(4脚)与G1B的输出相连,G1B的输入端(11脚)与G1A的输出相连。
两个晶体管的基极也分别通过限流电阻加至对方与非门的输出端,从而构成一双稳态电路。
与非门G1A、G1B的另一个输入端(5脚和10脚)与开关K的两定触点A、B相连,作为控制信号输入端。
由图2.18中的开关K的连接方式可知,当拨动开关K时,A、B两端的逻辑电平分别为01、00、10三种状态,分别对应电机的正转、停止和反转。
下面就按这3种状态分析电路的工作过程:
图3-1中开关K的位置使A点为低电平,B点为高电平。
因此与非门G1A 输出高电平U O1=U OH≈V DD,这时与非门G1B的两个输入端均为高电平,所以其输出U O2=U OL≈0V。
由于选用的CMOS与非门的驱动级是漏极开路的CMOS管,所以与非门具有较大灌电流而不能提供拉电流,故必须增加晶体管VT1、VT2来弥补G1A、G1B无拉电流的不足。
因为这时U O1≈V DD通过R2加至晶体管VT2的基极使其截止,U O2≈0V,加至晶体管VT1的基极使其导通,VT1的导通电流经过导通的与非门G1B从左向右流过电机M,使电机产生正向转动。
当开关K往下拨一挡时,A、B两点的电位均为低电平,与非门G1A、G1B均截止而输出高电平,晶体管VT1、VT2的基极由于都加上高电平也截止,电机两端均为高电平,即加至电机两端的电压为0V,所以电机停止转动。
当开关再往下拨一挡时,A点为高电平,B点为低电平,电路的工作状态与正转状态刚好相反,所以电机反转。
二、元器件的选择与调试
CMOS与非门先用C40107,其内部包含两个独立的2输入与非门,输出级为漏极开路的NMOS管,允许有较大的灌电流,以满足驱动微型电机的需要。
晶体管选用PNP管CD8550,微型电机的额定工作电压应为12V。
注意,不能用低压玩具代之,否则CMOS集成块将会因过电流而烧毁。
只要安装无误,元器件正常,无需调试即能正常工作。
三、微电机控制电路的安装调试
按照图3-2 微电机控制电路PCB图和图3-3 微电机控制电路安装图去安装调试。