车载移相全桥DC-DC变换器的设计与仿真
移相全桥DCDC变换器的设计与研究
i
ABSTRACT
With China's rapid economic development, electronic technology and computer technology become more and more widely. It makes the power supply develop in the direction of lighter , smaller, high-frequency and high-efficiency. While increasing the operating frequency, the power switch voltage and current stress increases as well.Soft-switching technology can achieve zero-voltage start or zero current shutdown. It can also improve the efficiency and reduce the electromagnetic interference. In the field of high-power applications,the phase-shifted full-bridge DC/DC converter has a simple circuit structure, a small switching loss, and it is easy to control.So it has been generally applied on many occasions.
第二章 移相全桥 DC/DC 变换器............................................................................................7 2.1 移相全桥 ZVS DC/DC 变换器 ....................................................................................7 2.2 移相全桥 DC/DC 变换器控制方式...........................................................................13 2.2.1 PID 控制............................................................................................................13 2.2.2 电压和电流双闭环控制 .................................................................................. 13 2.2.3 模糊控制 .......................................................................................................... 13 2.3 移相全桥 DC/DC 变换器关键问题的分析 ..............................................................14 2.3.1 两个桥臂实现 ZVS 的差异.............................................................................14 2.3.2 副边占空比的丢失 .......................................................................................... 16 2.3.3 整流二极管的换流 .......................................................................................... 17 2.4 改进型全桥移相 ZVS-PWM DC/DC 变换器电路 ..................................................21 2.5 本章小结 .....................................................................................................................28
车载移相全桥DCDC变换器的设计与仿真
车载移相全桥DC ⁃DC 变换器的设计与仿真DOI :10.19557/ki.1001-9944.2019.04.019何德威,石春,吴刚(中国科学技术大学信息科学技术学院,合肥230026)摘要:采用数字控制方式的移相全桥DC ⁃DC 变换器具有控制回路结构简单、抗干扰能力强等优点。
以车载移相全桥DC ⁃DC 变换器为控制对象,在分析其拓扑结构并得到二阶数学模型的基础上,通过频域分析系统的稳定性,并设计数字PID 控制器,构成闭环系统。
采用Saber ⁃Simulink 联合仿真的方式指导参数调节,在兼顾仿真系统收敛性的基础上加快仿真速度,缩短PID 参数的调整过程;在考虑车载电源对快速性、超调量的要求下,得到满足要求的控制器参数。
通过样机试验验证了分析的正确性。
关键词:数字控制;移相全桥;车载;PID 控制;联合仿真;Saber ;Simulink 中图分类号:TM46;U463.6文献标志码:A文章编号:1001⁃9944(2019)04⁃0075⁃05Design and Simulation of Vehicle Phase Shift Full Bridge DC ⁃DC ConverterHE De ⁃wei ,SHI Chun ,WU Gang(School of Information Science and Technology ,University of Science and Technology of China ,Hefei 230026,China )Abstract :The phase ⁃shifted full ⁃bridge DC ⁃DC converter adopting digital control has the advantages of simple controlloop structure and strong anti ⁃interference ability.The vehicle phase ⁃shifted full ⁃bridge DC ⁃DC converter is used as the control object.Based on the analysis of its topology and the second ⁃order mathematical model ,the stability of the system is analyzed in the frequency domain ,and the digital PID controller is designed to form a closed ⁃loop system.The Saber ⁃Simulink joint simulation method is used to guide the adjustment.On the basis of considering the conver ⁃gence of the simulation system ,the simulation speed is accelerated ,and the adjustment process of the PID parameters is shortened.The vehicle power supply is required to meet the requirements of rapidity and overshoot.The controllerparameters were verified and the correctness of the above analysis was verified by prototype experiments.Key words :digital control ;phase ⁃shift full bridge ;vehicle ;PID controller ;joint simulation ;Saber ;Simulink收稿日期:2019-01-10;修订日期:2019-03-06作者简介:何德威(1993—),男,硕士,研究方向为车载电力电子技术;石春(1980—),男,博士,高级工程师,研究方向为新能源汽车技术;吴刚(1964—),男,博士,教授,研究方向为先进控制、新能源汽车技术。
移相全桥ZVS PWM DC/DC变换器的仿真分析
移相全桥ZVSPWMDC/DC变换器的仿真分析作者:龙泽彪施博文来源:《消费导刊·理论版》2008年第17期[摘要]本文首先在研究硬开关的缺陷上,提出软开关技术。
对移相控制ZVS PWM DC/DC 变换器的工作原理进行分析研究的基础上,使用PSpice9.2计算机仿真软件对变换器的主电路进行仿真和分析,验证该新型DC/DC变换器的拓扑结构设计的正确性和可行性。
[关键词]软开关 DC/DC ZVS 移相控制 PSpice9.2作者简介:龙泽彪(1985-),男,湖北仙桃人,贵州大学电气工程学院在读硕士研究生,研究方向:异步电机控制;施博文(1985-),男,贵州大学电气工程学院在读硕士研究生,研究方向:电力电子与电气传动。
一、引言随着新型电力电子器件以及适用于更高频率的电路拓扑和新型控制技术的不断出现,开关电源朝着小型化、高效化、低成本、低电磁干扰、高可靠性、模块化、智能化的方向发展。
硬开关DC/DC变换器在电流连续工作模式下会遇到严重的问题,这一般都与有源开关器件的体内寄生二极管有关,其关断过程中的反向恢复电流产生的电流尖峰对开关器件有极大的危害。
本文在对DC/DC变换器的基本工作原理进行分析、研究的基础上,对已经出现的软开关DC/DC变换器拓扑结构进行分析研究,提出的一种新型的DC/DC变换器的拓扑结构,并进行深入的研究。
二、移相控制ZVS PWM DC/DC全桥变换器的工作原理移相控制ZVS PWM DC/DC全桥变换器(Phase-Shifted zero-voltage-switching PWMDC/DC Full-Bridge Converter,PS ZVS PWM DC/DC FB Converter),是利用变压器的漏感或原边串联的电感和功率管的寄生电容或外接电容来实现开关管的零电压开关,其主电路拓扑结构及主要波形如图1所示。
其中,D1~D4分别是S1~S4的内部寄生二极管,C1~C4分别是S1~S4的寄生电容或外接电容,Lr是谐振电感,它包含了变压器的漏感。
课程设计报告全桥直流变换器的设计与仿真

重庆大学电气工程学院电力电子技术课程设计设计题目:全桥直流变换器的设计与仿真年级专业:2010级电气工程与自动化学生姓名:学号:成绩评定:完成日期:2021年6月 23日课程设计指导教师评定成绩表指导教师评定成绩:指导教师签名:年月日重庆大学本科学生电力电子课程设计任务书摘要电力电子课程设计的目的在于进一步巩固和加深所学电力电子大体理论知识。
使学生能综合运用相关关课程的大体知识,通过本课程设计,培育学生独立试探能力,学会和熟悉查阅和占有技术资料的重要性,了解专业工程设计的特点、思路、和具体的方式和步骤,把握专业课程设计中的设计计算、软件编制,硬件设计及整体调试。
通过设计进程学习和治理,树立正确的设计思想和严谨的工作作风,以期达到提高学生设计能力。
本次课题为全桥直流变换器的设计与仿真,利用了全控器件IGBT,能将直流信号转换成变压的直流信号,其作用相当于一个变压器。
一样的变压器是由交流电压只是变比能很方便的通过操纵IGBT的驱动信号占空比来操纵,而且能有滤波的功能。
全桥直流变换器集PWM技术和谐振技术于一体,具有体积小、重量轻、效率高的特点,专门适合中大功率应用处合,然后对其工作原理的分析。
本次课程设计确实是基于对全桥直流变换器的设计与仿真练习,达到培育学生独立试探解决问题的能力。
正文1.引言问题的提出随着科学技术进展的日新日异,电力电子技术在现代社会生产中占据着非常重要的地位,电力电子技术应用在是生活中能够说得是无处不在若是把计算机操纵比喻为人的大脑,电磁机械等动力机构喻为人的四肢的话,那么电力电子技术那么可喻为循环和消化系统,它是能力转化和传递的渠道。
因此作为二十一世纪的电气专业的学生而言把握电力电子应用技术十分重要。
全桥DC/DC变换器是可双象限运行的直流-直流变换器。
随着科技和生产的进展,对全桥DC/DC 变换器的需求慢慢增多,要紧有直流不断电电源系统、航天电源系统、电动汽车等应用处合。
在需要能量双向流动的场合,全桥DC/DC变换器的应用可大幅度减轻系统的体积重量和本钱,有重要的研究价值。
75kW移相全桥ZVS DC-DC变换器的设计共3篇
75kW移相全桥ZVS DC-DC变换器的设计共3篇75kW移相全桥ZVS DC/DC变换器的设计175kW移相全桥ZVS DC/DC变换器的设计随着电能的需求不断增加,直流(DC)与交流(AC)能量的转换变得越来越重要。
近年来,随着电力电子技术的发展和高性能的半导体器件的不断进步,DC/DC变换器在工业和消费电子领域的应用越来越广泛。
75kW移相全桥ZVS DC/DC变换器是一种高性能变换器,能够实现高效率、高功率转换。
移相全桥ZVS DC/DC变换器的结构包括移相控制器、输人电感、输出电容、全桥开关和ZVS电路等。
其中,移相控制器的作用是控制全桥开关的相位移动,从而实现零电压开关(ZVS)控制,减少开关过程中的损耗和电磁干扰。
输人电感和输出电容则是负责滤波,保证输出电压的稳定性。
全桥开关通过不同配合的通断实现正负输出电流控制。
ZVS电路通过滤波和电容,实现电路的诸多物理参数计算协调,并通过工艺合理设计,降低待机功耗和回路波动影响。
在设计75kW移相全桥ZVS DC/DC变换器时,需要考虑诸多因素。
首先,应该确定输入电压和输出电压的范围,设计输人电感和输出电容的尺寸。
其次,需要确定最大输出功率、输出电源电流和开关频率,保证全桥开关的可靠性和ZVS电路的稳定性。
还需考虑系统的可扩展性和环境因素,以充分考虑变换器在工业应用和肆意使用中的优越性。
在开发过程中,需要充分利用仿真和实验测试,调整参数和设计方案,为最优的变换器性能和稳定性进行优化和调整。
因此,设计和发布75kW移相全桥ZVS DC/DC变换器需要对额定值、特殊应用等项指标有充分的认识、调试和经验,并充分考虑到指示等级、节约能源等重要性,超出标准数值要求的评定指数,以实现最优化控制。
总之,75kW移相全桥ZVS DC/DC变换器是一种高效、高功率、高稳定性的电能转换装置,能够在工业和消费电子领域得到广泛应用。
设计和发布此类设备需要充分考虑应用环境、指标要求和设计方案,充分利用仿真和实验测试,以实现最优化控制、最低化能量损耗和实时可调参数,为应用和发展带来更多的便利和效益综上所述,75kW移相全桥ZVS DC/DC变换器是一种具有巨大潜力和广泛应用前景的电能转换装置。
移相全桥ZVZCSDCDC变换器综述.
移相全桥ZVZCSDC/DC变换器综述摘要:概述了9种移相全桥ZVZCSDC/DC变换器,简要介绍了各种电路拓扑的工作原理,并对比了优缺点,以供大家参考。
关键词:移相控制;零电压零电流开关;全桥变换器 1概述所谓ZVZCS,就是超前桥臂实现零电压导通和关断,滞后桥臂实现零电流导通和关断。
ZVZCS方案可以解决ZVS方案的故有缺陷,即可以大幅度降低电路内部的循环能量,提高变换效率,减小副边占空比丢失,提高最大占空比,而且其最大软开关范围不受输入电压和负载的影响。
图1 滞后桥臂零电流开关是通过在原边电压过零期间使原边电流复位来实现的。
即当原边电流减小到零后,不允许其继续反方向增长。
原边电流复位目前主要有以下几种方法: 1)利用超前桥臂开关管的反向雪崩击穿,使储存在变压器漏感中的能量完全消耗在超前桥臂的IGBT中,为滞后桥臂提供零电流开关的条件;图2 2)在变压器原边使用隔直电容和饱和电感,在原边电压过零期间,将隔直电容上的电压作为反向阻断电压源,使原边电流复位,为滞后桥臂开关管提供零电流开关的条件; 3)在变压器副边整流器输出端并联电容,在原边电压过零期间,将副边电容上的电压反射到原边作为反向阻断电压源,使原边电流迅速复位,为滞后桥臂开关管提供零电流开关的条件。
图3 2 电路拓扑根据原边电流复位方式的不同,下面列举几种目前常见的移相全桥ZVZCSPWMDC/DC拓扑结构,以供大家参考。
图4 1)NhoE.C. 电路如图1所示[1]。
该电路是最基本的移相全桥ZVZCS变换器,它的驱动信号采用有限双极性控制,从而实现超前桥臂的零电压和滞后桥臂的零电流开关。
这种拓扑结构的缺陷是L1k要折衷选择,L1k太小,在负载电流很小时,超前桥臂不能实现零电压开关;L1k太大,又限制了iL1k的变化速度,从而限制了变换器开关频率的提高。
变换器给负载供电方式是电流源形式,电感L1k电流交流变化,输入电流脉动很大,要求滤波电容很大。
移相全桥ZVS控制的电动汽车DCDC转换器设计研究
116AUTO TIMEAUTOMOBILE DESIGN | 汽车设计移相全桥ZVS 控制的电动汽车DC/DC 转换器设计研究王迎斌南京长安汽车有限公司 江苏省南京市 211200摘 要: 本文采用移相全桥控制策略,设计了一种应用于电动汽车的DC/DC 变换器并能实现功率开关的零电压导通。
本文对其进行了简要介绍移相全桥ZVS-DC 变换器的拓扑结构。
制造了一个原型进行了一系列的实验。
最终的实验结果与仿真结果相一致,且满足要求设计要求,证明设计方案的可行性。
关键词:移相全桥 电动汽车 拓扑结构 ZVS 控制1 引言伴随着全球能源危机情况的日益严重,节能环保汽车需求不断增加,大力发展电动汽车已成为国家重要战略的目标之一,而作为电动汽车核心部件的DC/DC 转换器,对其进行更深入的研究和改进也变得愈发迫切。
开关电源由于效率高、可靠性好等优点近年来逐渐受到设计人员的关注,其高频状态下的功率器件具有非线性特性,寄生电路参数在高频工况下效应明显,可以通过平稳的系统操作达到高效传输的目的。
在此设计中,相移全桥ZVS DC/DC 设计了电动汽车用变频器。
相移全桥ZVS DC/DC 转换器适用于中功率和大功率场合。
它可以充分利用功率器件的寄生参数来实现零电压开关并提高开关的开关频率[1]。
2 移相全桥ZVS DC / DC 转换器的结构和特征DC/DC 转换器可以将不可调节的直流电压转换成可调节的直流电压。
随着电动汽车的发展,DC/DC 转换器越来越多地应用于电动汽车中广泛。
由于动力电池的高压电源可以转换为低压电源通过DC/DC 转换器可以替代传统车辆中的小型发电机车辆的布局和结构可以优化。
相移全桥ZVS DC/DC 转换器的拓扑如图1所示。
全桥逆变器电路用于变压器的一次电路。
Q 1,Q 2,Q 3和Q 4是功率器件,例如IGBT 或MOSFET。
D 1,D 2,D 3和D 4是Q i 的寄生二极管分别。
C i 是寄生电容。
48V_30A移相全桥ZVS DC_DC 变换器的设计
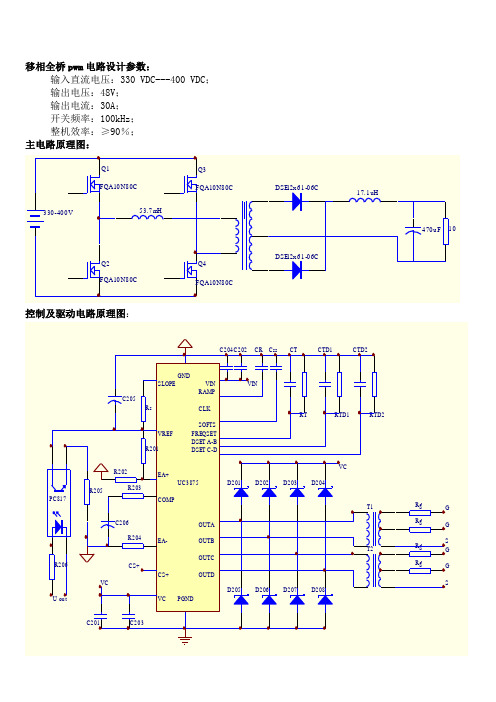
17.1uH10470uFQ3FQA10N80CQ4 Q1Q2FQA10N80CDSEl2x61-06C330-400V53.7m HDSEl2x61-06CFQA10N80CFQA10N80C控制及驱动电路原理图:PC817VIN RAMP CLK SOFTS FREQSET DSET A-B DSET C-DUC3875VREF CS+VCOUTCOUTBOUTA OUTDCOMPEA- EA+SLOPEPGNDGNDC205C206RT U outCS+R206R202R203R205RsR204R201C201C203C204RTD1RTD2C202CR Css CTD1CTD2CT VINT1T2RgRg Rg RgD202D207D204D208D201D205D206D203VCVCG G S G GS电路各参数计算:一:高频变压器设计:(1).选择铁氧体材料的磁芯,设η=90%,其工作磁场强度取B m =0.12T ,电流密度取J =350 cm A 2/,k=0.4。
视在功率P T (全波结构时): )21(0+=ηP P T 。
kJ B f P APST 0m 4410⨯=代人参数得:AP =5.4 cm 4考虑到磁芯的温升及工作频率,取EE 型磁芯65x32x27(mm),则AP=30.7625(cm 4),Ae=535(mm 2),Aw=575(mm 2)。
具体参数如下表:(2).为了防止共同导通,取占空比D max =O.4,初级绕组匝数: N 1== A B f DU e S ∆mmax 1=AB f D U eS mmax 12其中:B ∆m 为磁通密度增量,B m 为工作磁通密度,B ∆m 应取一、三象限磁通密度的总增量,故BB 2m m=∆ ;A e 为磁芯有效面积(m2);fS为功率开关的工作频率(Hz)。
带入参数得:N 1=12.8 故取N 1=13匝。
那么初级绕组最大电流:ηUPI minin 0pmax ==4.85(A )初级绕组裸线面积:JI A xp pmax==1.39 (cm )(3).次级绕组匝数:AB f U N eSS m24==2.3 故取N S =3匝。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车载移相全桥DC-DC变换器的设计与仿真何德威;石春;吴刚【摘要】采用数字控制方式的移相全桥DC-DC变换器具有控制回路结构简单、抗干扰能力强等优点.以车载移相全桥DC-DC变换器为控制对象,在分析其拓扑结构并得到二阶数学模型的基础上,通过频域分析系统的稳定性,并设计数字PID控制器,构成闭环系统.采用Saber-Sirnulink联合仿真的方式指导参数调节,在兼顾仿真系统收敛性的基础上加快仿真速度,缩短PID参数的调整过程;在考虑车载电源对快速性、超调量的要求下,得到满足要求的控制器参数.通过样机试验验证了分析的正确性.【期刊名称】《自动化与仪表》【年(卷),期】2019(034)004【总页数】5页(P75-79)【关键词】数字控制;移相全桥;车载;PID控制;联合仿真;Saber;Simulink【作者】何德威;石春;吴刚【作者单位】中国科学技术大学信息科学技术学院,合肥230026;中国科学技术大学信息科学技术学院,合肥230026;中国科学技术大学信息科学技术学院,合肥230026【正文语种】中文【中图分类】TM46;U463.6近年来,由于环境污染、化石能源短缺等问题日益突出,以电动汽车为代表的新能源汽车受到了人们的关注,且发展迅速,对电动汽车车载电力电子设备的研究也方兴未艾。
针对电动汽车车载高低压直流变换器(DC-DC)的研究则是车载电力电子技术的重点,考虑到电动汽车越来越严苛的能耗要求、车载情况下复杂的电磁环境以及逐渐增加的电附件,对电动汽车车载DC-DC 变换器在效率、抗干扰、大功率等方面提出了越来越高的标准。
移相全桥PSFB(phase-shift full bridge)拓扑,采用外加电感与开关管寄生电容(或并联电容)谐振的方式实现软开关技术,在高频应用时相比全桥拓扑能极大地提高效率,同时能够适用于大功率的应用场合。
而传统PSFB 变换器的控制器往往采用模拟IC 芯片搭配分立元器件来实现功能,相比之下,数字控制系统具有控制回路简洁、抗干扰能力强的优点,并且数字控制芯片兼有实时通讯等接口,能够满足车载环境下实时监控与通讯等需求。
Saber 软件在器件仿真方面具有拟合程度高、收敛性能好、仿真速度快等优点;MatLab/Simulink则可提供算法设计方面的支持,能够以C/C++语言实现S 函数,满足对软件层面的模拟。
通过Saber 中提供的Saber-Simulink 联合仿真机制,在两者间通过设置合适的采样步长,便可实现两者的联合仿真[1],从而优势互补。
综上,在此以数字控制的移相全桥DC-DC 变换器为研究的对象,在分析其结构原理得到二阶传递函数数学模型的基础上,进行频域分析与数字PID控制器设计。
1 移相全桥结构的分析与建模PSFB 拓扑结构如图1 所示。
图中,变压器原边二极管D1—D4 为开关管Q1—Q4 内部并联的体二极管;C1—C4 为开关管Q1—Q4 寄生电容或外接电容;Lr 为谐振电感,包括主变压器自身漏感;变压器副边DR1 和DR2 为整流二极管;Lleak1 和Lleak2 为变压器副边等效漏感;Lf 为输出滤波电感;Co 为滤波电容;Ro 为输出负载。
图1 移相全桥结构Fig.1 PSFB structure其中,Q1,Q2 组成超前桥臂;Q3,Q4 组成滞后桥臂。
同一桥臂上下开关管驱动波形为180°互补导通(忽略死区时间),超前臂(Q1,Q2)驱动波形超前滞后臂(Q3,Q4)若干角度即占空比(移相角)D,调整D 可以改变变压器原边输入方波u1 的宽度,如图2 所示。
方波u1 经过变压器降压、全波整流、LC 滤波后得到直流输出。
图2 变压器原边输入波形Fig.2 Input waveform of transformer primary side在忽略原边谐振电感的影响,将开关管与变压器理想化的情况下,根据图2,变压器原边输入电压u1 为受占空比D 控制的方波,如图3(a)所示;输入方波u1再经过变压器降压、整流后接入LC 滤波器,如图3(b)所示;此时PSFB 电路可等效为幅值u1/K的直流输入,占空比为D 的降压式变换Buck 电路如图3(c)所示。
而在满足小纹波假设、低频假设、小信号假设的情况下,Buck 电路的小信号模型如图3(d)所示。
综上,在忽略谐振电感、器件理想化的情况下,可以采用Buck 电路的小信号模型来指导分析PSFB 电路。
图3 简化移相全桥小信号模型Fig.3 Simplified PSFB small signal model但考虑到谐振电感的影响,在负载较重时会出现副边得到的方波u2 占空比Dsec 明显小于原边输入方波的占空比D 的现象,如图4 所示。
图中,u1 为变压器原边输入电压,u2 为变压器副边电压,i1 为原边输入电流。
图4 原副边占空比对比Fig.4 Comparison of duty cycle between original side and secondary side占空比的丢失是因为原边电流i1 在换流过程(电流方向反向时)时,谐振电感Lr 导致电流不能突变,出现i1 小于负载电流的阶段(即图中虚线部分),此阶段内变压器副边处于短路状态,整流二极管DR1 和DR2 同时导通,负载自然续流,直至原边电流重新提供负载电流。
副边丢失的占空比为因此PSFB 拓扑应在所述Buck 电路模型的基础上考虑占空比丢失的影响。
占空比丢失的时间为图4 所示原边输入电流由-I1 变化至I2 的时间,副边实际有效占空比deff 应为[2]式中:deff 为副边有效占空比;D 为原边给定占空比;K 为变压器变比;Lr 为谐振电感;Uin 为输入额定电压;Ts 为开关周期;If,i 为输出滤波电感Lf 的电流峰值;Uo 为输出电压;Lf 为输出滤波电感。
由式(2)可知,对于给定的电路参数,有效占空比deff 只受If,i,Uin,D 三者的影响,只要求出有效占空比代入所分析的Buck 电路小信号模型中的就可以得到PSFB 电路的小信号模型。
而由式(2)可得式中分别为If,i,Uin,D 对deff 的扰动。
由式(2)可得其中式中:fs 为开关频率。
将代替图3(d)中的从而可得PSFB 小信号模型,如图5 所示。
图5 移相全桥小信号模型Fig.5 Small signal model of PSFB最后,由小信号模型可得占空比对输出电压的传递函数[3]为2 数字控制系统的设计在此所设计的电路参数见表1。
表1 设计电路的参数Tab.1 Parameters of design circuit电路参数额定输入电压Uin变压器变比K额定负载电阻Ro输出滤波电感Lf输出滤波电容Co数值及单位380 V 15 0.33 Ω 3.3 μH 7500 μF电路参数数值及单位谐振电感Lr 22 μH开关周期Ts 10 μs开关频率fs 100 Hz额定功率P 500 W输出电压Uo 12.8 V将表1 数值代入式(7),可得再对其进行伯德图分析,其过零频率为5 kHz,满足远小于开关频率的条件;相位裕量约为22°,幅值裕量大于50 dB。
在未增加控制的情况下,开环系统处于稳定状态,但带宽较小,响应速度较慢。
故应增加控制器提高系统响应速度。
在此,采用增量式数字PID 的方式进行调节,选用高速DSP 芯片作为主控单元,在PSFB 电气回路的基础上增加输入电压电流、输出电压电流思路采样电路,电气量经过滤波后送入主控芯片AD 接口,在芯片内通过软件滤波,阈值保护后进行PID计算得到占空比,将的占空比进行PWM 变换与隔离后用来驱动开关管。
同时,利用芯片控制器局域网络CAN 接口进行整车通讯,如图6 所示。
图6 数字系统设计Fig.6 Digital system design软件控制部分分为主函数和中断函数部分,如图7 所示。
系统上电后自动开始开机检测,随后进入主函数循环,在主函数中主要进行阈值判断与保护。
同时,设置定时中断函数,分为AD 采样中断、PID 计算中断、CAN 通讯中断。
三者按任务的重要性划分优先级:AD 采样中断>PID 计算中断>CAN 通讯中断。
图7 软件流程Fig.7 Software flow chart其中,PID 计算部分根据AD 采样得到的输出电压uo,ad 与给定值相比较,得到误差信号error,根据离散增量式PID 公式得到的占空比信号d 为式中:dinc 为占空比增量;d 为实时占空比;e0 为当前误差;e1 为上一次误差;e2 为上两次误差;kp,ki,kd 分别为增量式PID 参数。
3 Saber-Simulink 联合仿真Saber 仿真软件在提供海量器件模型的基础上,允许用户自行建模,设计满足特定参数的器件,能很好地拟合实际情况,然而在数字系统方面有所欠缺,无法提供软件方面的仿真,不能进行功能性的算法设计。
相反地,Simulink 是很强的控制系统设计工具,其S 函数功能能够提供C/C++等语言环境进行算法设计或改进,较好地符合实际情况中数字系统的设计环境,但在具体器件仿真方面不如Saber精准和方便。
因此,采用Saber 作为硬件器件仿真工具,Simulink 仿真数字控制部分的联合仿真是最终选择。
联合仿真结构如图8 所示。
图8 联合仿真结构Fig.8 Joint simulation structure diagram图中,在Saber 环境下搭建PSFB 的电气回路部分,并在其中加入Sense 与Var to V 模块,Sense 模块将电气参数转换为标量供Simulink 使用,Var toV模块接受来自Simulink 的控制信号用于驱动开关管。
Saber-Simulink Cosimulation是Saber 提供的联合仿真接口,设置好采样步长后用于Saber-Simulink两者间的数据交互。
在Simulink 环境下则设计了2 个S 函数模块:PID模块与PWM creator 模块。
PID 模块接受来自Saber的采样数据进行PID 计算后得到目标占空比,PWM creator 模块则根据计算得到占空比与斜坡信号比较,得到根据占空比调制的PWM 信号,该PWM 信号最终通过Cosimulation 模块返回Saber 软件中用于开关管的驱动。
Simulink 数字控制部分如图9。
图9 Simulink 数字控制部分Fig.9 Simulink digital control part其中,PWM 驱动信号的产生原理如下:由斜坡模块产生最大值为1000,周期为10 μs 的斜坡信号slope。
将计算得到的占空比信号d 放大至0~400 得到比较信号compare,利用最大值为1000 的斜坡信号slope 与比较信号比较,在比较信号等于斜坡信号时触发滞后臂信号delay 为高,固定延时半周期(不考虑死区时间)后触发滞后臂信号为低;而超前臂信号lead 则在斜坡信号等于0 时触发为高,同样固定延时半周期(不考虑死区时间)后触发为低。