MIMO系统的恒模算法CMA
用恒模算法进行盲自适应均衡的MATLAB仿真

用恒模算法进行盲自适应均衡的MATLAB仿真一:仿真内容:1:了解盲均衡算法和CMA算法的原理;2:用CMA算法来仿真4QAM信号;二:算法原理:1:盲均衡算法:一般的均衡器需要训练和跟踪两个时期,在训练时期,需要已知信号的一些特性参数来训练均衡滤波器,或直接周期地发送训练序列。
由于训练序列并非含用户的数据,而占用了信道资源,自然会降低信道的利用率。
另外,在跟踪时期,不发送训练序列,若是信道特性是快速转变的,均衡器的性能将迅速恶化。
盲均衡能够不借助训练序列(即咱们通常所说的“盲”,而仅仅利用所接收到的信号序列即可对信道进行均衡。
换言之,其本身完全不用训练序列,就能够够自启动收敛并避免死锁情形,且能使滤波器的输出与要恢复的输入信号相等。
盲均衡从全然上幸免了训练序列的利用,收敛范围大,应用范围广,克服了传统自适应均衡的缺点,从而降低了对信道和信号的要求。
盲均衡的原理框图如下:在上图中,x(n)为系统的发送序列,h(n)为离散时刻传输信道的冲激响应,其依据所用调制方式的不同,能够是实值,也能够是复值;n(n)为信道中叠加的高斯噪声;y(n)为通过信道传输后的接收序列,同时也是均衡器的输入序列;w(n)为盲均衡器的冲激响应,盲均衡器一样采纳有限长横向滤波器,其长度为L;x为盲均衡器的输出信号,也即通过均衡后的恢复序列。
)(~n且有下式成立:y(n)=h(n)*x(n)+n(n);x=w(n)*y(n)=w(n)*h(n)*x(n);(~n)2:Bussgang算法Bussgang类盲均衡算法作为盲均衡算法的一个分支,是在原先需要训练序列的传统自适应均衡算法基础上进展起来的。
初期的盲均衡器以横向滤波器为大体结构,利用信号的物理特点选择适合的代价函数和误差操纵函数来调剂均衡器的权系数。
这种算法是以一种迭代方式进行盲均衡,并在均衡器的输出端对数据进行非线性变换,当算法以平均值达到收敛时,被均衡的序列表现为Bussgang 统计量。
cma算法原理
cma算法原理小伙伴!今天咱们来唠唠CMA算法原理呀。
这CMA算法呢,就像是一个超级聪明又有点小调皮的小助手在数据的海洋里畅游呢。
CMA,全称恒模算法(Constant Modulus Algorithm)。
想象一下,我们有一堆数据,这些数据就像是一群调皮捣蛋的小精灵,它们各自有着不同的数值和特性。
CMA 算法的目标呢,就是要在这堆小精灵里找到某种规律,就像把一群乱跑的小羊赶回正确的羊圈一样。
那它具体怎么干的呢?它呀,是基于信号的恒模特性来工作的。
比如说,有一些信号呢,它们的幅度或者说模值在理想情况下是恒定不变的。
这就好比是一群小士兵,他们都应该保持一样的身高(这里的身高就类比信号的模值啦)。
但是呢,在实际的情况中,就像小士兵们在战场上可能会因为各种情况而变得高矮不一(信号受到干扰等情况导致模值变化)。
CMA算法就开始发挥它的魔力啦。
它会先对输入的信号进行一些处理。
这个处理就像是给每个小士兵量身高,看看谁高了谁矮了。
然后呢,它会根据这个测量的结果,计算出一个调整的量。
这个调整量就像是给那些身高不对的小士兵特制的增高鞋或者矮一点的鞋垫。
CMA算法会不断地重复这个过程。
它就像一个超级有耐心的老师,一遍又一遍地检查小士兵们的身高,然后给他们调整。
每一次调整呢,都希望能让整个队伍(也就是信号)更接近理想的状态,也就是让信号的模值更接近恒定的值。
而且哦,这个算法在处理的时候,并不是盲目地调整。
它就像一个很有经验的厨师,知道每种调料(调整的参数)该放多少。
它通过一些数学公式来精确地计算出每次调整的幅度。
这些数学公式呢,虽然看起来有点复杂,但是就像厨师的独家秘方一样,是这个算法的精髓所在。
在这个过程中,CMA算法还像是一个小侦探呢。
它要从各种干扰和噪声中把真正有用的信号找出来。
就像在一个很吵闹的集市里,要找到那个声音很微弱但是很重要的朋友的声音一样。
它通过分析信号的特征,把那些不属于正常信号的干扰因素一点点排除掉。
MCA—CMA次分量分析恒模算法

u s e .M i o o o e t n l ss ( CA )i d p e o fn u h p i l i h e t r o t e n rc mp n n a y i M a sa o t d t i d o tt e o tma g tv c o .S h we
此算 法易 收敛 于局部 极小点 。因此 , 文在权 值满 本 足约 束条件 W 一1 , “ 下 从恒 模代 价 函数 出发 , 通过
数 学 推 导 和 分 析 发 现 最 优 权 矢 量 对 应 于 Ra l g ye h i
应 算法 , 由于其 事 先 不需 要 知道 参 考 ( 练 ) 列 , 训 序
文 章 编 号 : 0 4 9 3 ( 0 8) 3 0 7 — 4 1 0— 0 72 0 0 —2 00
MC — MA 次 分 量 分 析 恒 模 算 法 AC
王淑 艳 吴 仁 彪 石庆 研
( 国 民航 大 学 天 津 市 智 能 信 号 与 图像 处 理 重 点 实 验 室 , 津 , 0 3 0 中 天 30 0 )
摘 要 : 出 了一 种 次 分 量 分析 恒模 算 法 ( n r o o e t n l i—o sat d lsa oi m, C — M A) 该 提 Mio mp nn ay scntn uu l r h M A C c a s mo g t 。
算 法 从 恒 模 代 价 函 数 出发 , 导 出一 个 基 于 Ra lih熵 形 式 的 代 价 函数 , 据 R yeg 推 ye g 根 a l h熵 的 性 质 , 得 出最优 权 i 可 矢量 就 是 协 方 差 矩 阵 的 最 小特 征 值 所 对应 的特 征 矢 量 , 而 引入 次 分 量 分 析 ( A) 找 最 优 权 矢量 , 此 该 恒 从 MC 寻 因 模 算 法 称 为 MC — M A 算 法 。仿 真 结 果 充 分验 证 该 算 法 的 有效 性 。 AC
MIMO无线通信技术研究

MIMO无线通信技术研究MIMO(Multiple-Input Multiple-Output)无线通信技术是一种利用多个天线同时发送和接收数据的技术,通过这种方法,可以增加无线通信系统的数据传输速率和可靠性。
本文将介绍MIMO无线通信技术的相关研究。
MIMO技术的原理在于通过增加发送和接收天线的数量,利用空间复用和多天线分集来提高数据传输速率和可靠性。
在MIMO系统中,多个天线同时发送和接收数据,并通过多个路径传播,从而增加了数据传输速率和可靠性。
MIMO技术在无线通信领域得到了广泛应用,包括蜂窝网络、无线局域网、卫星通信等。
下面介绍一些MIMO技术的应用情况:在蜂窝网络中,MIMO技术被用来提高数据传输速率和可靠性。
在基站和移动台之间,通过增加天线的数量,可以实现多路同时传输和接收数据,从而提高数据传输速率。
MIMO技术也可以增强信号强度和覆盖范围,从而提高网络的可靠性。
在无线局域网中,MIMO技术也被用来提高数据传输速率和可靠性。
通过在接入点和客户端之间增加天线的数量,可以实现多路同时传输和接收数据,从而提高数据传输速率。
MIMO技术也可以增加信号覆盖范围,从而提高网络的可靠性。
在卫星通信中,由于卫星的信号覆盖范围广,信号传输距离远,因此卫星通信系统也常常采用MIMO技术。
通过在卫星和地球站之间增加天线的数量,可以实现多路同时传输和接收数据,从而提高数据传输速率。
MIMO技术也可以增加信号强度和覆盖范围,从而提高网络的可靠性。
随着科技的不断发展,MIMO技术在未来仍具有广泛的应用前景。
在未来5G通信和6G通信等无线通信系统中,MIMO技术将更加重要。
在未来,对于MIMO技术的研究和应用将会涉及更多领域和技术,例如人工智能、物联网、高频通信等。
在这些领域和技术中,MIMO技术将能够发挥更大的作用,为未来的无线通信系统提供更高的性能和更高效的传输效率。
MIMO无线通信技术是一种具有重大意义的技术,它可以提高无线通信系统的数据传输速率和可靠性。
MIMO均衡算法(CMALMSRLS)原理介绍
MIMO均衡算法(CMALMSRLS)原理介绍MIMO(Multiple Input Multiple Output)均衡算法是用来解决多输入多输出通信系统中的信号干扰问题的一种方法。
MIMO系统是一种通过在发送和接收端使用多个天线来提高通信性能的技术,它可以同时传输多个信号流,从而提高了系统的传输容量和可靠性。
MIMO均衡算法主要有三种:CMA(Constant Modulus Algorithm)、LMS(Least Mean Square Algorithm)和RLS(Recursive Least Square Algorithm)。
下面将对这三种算法的原理进行详细介绍。
1.CMA算法原理:CMA算法是一种基于判决反馈的盲均衡算法,主要用于消除通信系统中的多径干扰。
其原理基于一种常数模型,即假设接收信号的样本具有常数模量。
CMA算法通过最小化误差信号的功率来估计多径信道,从而实现均衡。
算法的核心思想是根据判决反馈,通过调整均衡器的参数来最小化误差信号的功率。
2.LMS算法原理:LMS算法是一种基于梯度下降法的自适应均衡算法,其主要特点是简单易理解、计算速度快。
LMS算法通过最小化接收信号与期望信号之间的误差来更新均衡器的权重。
算法的核心思想是根据误差信号和输入信号之间的相关性来更新均衡器的参数,从而逐步优化均衡器的性能。
3.RLS算法原理:RLS算法是一种基于递推最小二乘法的自适应均衡算法,其主要特点是收敛速度快、抗干扰性能好。
RLS算法通过最小化误差的均方值来更新均衡器的权重。
算法的核心思想是根据输入信号和误差信号之间的相关性来更新均衡器的参数,从而实现均衡。
相比于LMS算法,RLS算法的计算复杂度较高,但是收敛速度更快,适用于信道条件变化频繁的情况。
总而言之,MIMO均衡算法通过调整均衡器的权重来消除多输入多输出通信系统中的信号干扰,从而提高通信系统的性能。
CMA算法是一种基于判决反馈的盲均衡算法,LMS算法是一种基于梯度下降法的自适应均衡算法,RLS算法是一种基于递推最小二乘法的自适应均衡算法。
恒模算法及其在盲波束形成中的应用
恒模算法及其在盲波束形成中的应用恒模算法及其在盲波束形成中的应用摘要:盲波束形成是一种通过自适应信号处理技术实现的多个接收天线的阵列信号处理方法。
恒模算法是盲波束形成中应用较为广泛的一种算法,它通过实时监测各个通道的信噪比,并相应地调整每个通道的增益,从而达到信号增强和干扰抑制的目的。
本文将对恒模算法的原理、实现方法以及在盲波束形成中的应用进行详细介绍。
一、引言随着通信技术的不断发展,无线通信系统在提高数据传输速率、增加连接数等方面面临着越来越多的挑战。
盲波束形成作为一种有效的天线阵列信号处理方法,能够有效提高信号质量,降低信号间干扰,因此在无线通信系统中得到了广泛的应用。
二、恒模算法原理恒模算法是一种基于自适应信号处理技术的方法,主要通过监测每个通道的信噪比来调整各个通道的增益,从而实现信号的增强和干扰的抑制。
其主要原理如下:1. 信噪比监测:通过对每个通道的输入信号进行功率估计和噪声估计,计算信噪比。
信噪比的计算可以采用均方误差法或最小均方误差法。
2. 增益调整:根据信噪比的大小,调整每个通道的增益。
当信噪比较低时,增加相应通道的增益;当信噪比较高时,降低相应通道的增益。
3. 误差更新:根据调整后的增益,计算误差信号,并将其作为输入信号进行下一次迭代。
三、恒模算法实现方法恒模算法的实现通常包括以下几个步骤:1. 初始化:设置每个通道的增益初始值。
2. 信号采集:通过天线阵列采集输入信号。
3. 信噪比计算:对每个通道的输入信号进行功率估计和噪声估计,计算信噪比。
4. 增益调整:根据信噪比的大小,调整每个通道的增益。
5. 误差计算:根据调整后的增益,计算误差信号。
6. 误差更新:将误差信号作为新的输入信号,进行下一次迭代。
7. 收敛判断:通过设定的终止条件,判断算法是否收敛,如果没有收敛则返回步骤4继续迭代。
四、恒模算法在盲波束形成中的应用恒模算法在盲波束形成中的应用主要包括:1. 信号增强:通过不断调整每个通道的增益,使得目标信号在接收端得到增强。
误码率cma
CMA(恒模算法)误码率指的是CMA在解码时所可能产生的错误编码的概率,也即CMA无法正确解码的信号的比例。
在数字通信中,由于信道噪声的存在,接收到的信号可能存在误差。
恒模算法是一种自适应均衡算法,它根据接收信号的统计特性调整其增益和相位,以减小误码率。
CMA 在通信领域应用广泛,尤其在无线通信和光纤通信中。
然而,CMA的具体误码率数值会受到多种因素的影响,包括信道噪声的性质和强度、信号的调制方式、均衡器的设计和参数选择等。
这些因素都会影响CMA解码的准确性。
在实际应用中,通常需要通过实验或仿真来评估CMA的误码率性能。
此外,也可以通过改进CMA算法或采用其他更先进的均衡算法来降低误码率。
MIMO快速恒模均衡算法研究
MIMO快速恒模均衡算法的研究张琛鄷广增(南京邮电大学通信与信息工程学院,江苏南京 210003)摘要:恒模算法CMA是一种重要的盲均衡自适应算法,但其性能取决于快速收敛的自适应算法。
本文研究的一种批处理的恒模算法通过优化搜索方向,步长,初值等方面的影响,达到快速收敛的目的。
关键词:恒模算法;批处理;步长;初始值The Study on A Fase Blind Adaptive Algorithm CMA In MIMOSystemZhang chen ,FENG Guang-zeng(Communication and Information Engineering Institute Nanjing University of Posts & Telecommunications,Nanjing Jiangsu 210003, China)Abstract: CMA is an important blind equalization algorithm, but the realization of its best performance for CMA depends on fast effective convergence algorithm. This paper investigates a fast effective convergence CM algorithm named BPCMA [1]which optimizes the effects of the step size, the initial value, and the search direction。
Key words: CMA; Batch Processing; step size; initial value1 引言传统的自适应均衡技术需要插入一些时段(时变系统中要周期性重现)的训练序列,接收机按迫零原理或最小均方误差准则调整横向滤波器抽头系数,使得整个传送系统(含信道和均衡器)输出的符号与符号之间的干扰被消除。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 SISO Fading Channel
Signal FIR channel model: x ( t ) = ∑ hk s ( t − k )
k =0 K
(1-1)
Where s ( t ) is transmitted signal, x ( t ) is received signal and hk is channel impulse response. The FIR channel cause ISI in the x ( t ) , to decode s ( t ) correctly, a equalizer is often required. In the receiver, the output of an equalizer is given by: y ( t ) = ∑ wl x ( t − l ) It is desired that y ( t ) = s ( t − t0 ) , where t0 is an unknown constant. The wl can be found by the minimize of following cost function [2]:
2
(1-3)
J CM It can be seen that if s ( t ) is CM and wl is the solution of a zero forcing equalizer,
∑ wl x ( t − l ) = s ( t − t0 )
l =0
L
(1-4)
Then the J CM will reach its global minimum, i.e. J CM = 0
1
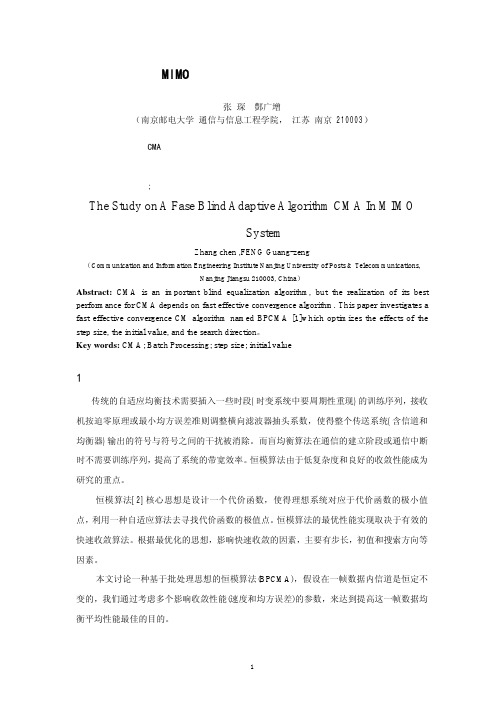
chre 1.
s(t )
h1(z)
x1(t)
w1(z)
h2(z)
x2(t)
w2(z)
Σ
y(t )
hK(z)
xK(t)
wK(z)
CAM
Figure 1. Multi-channel representation of FSE Where hk ( z ) = ∑ hk ,l z
w io
(2-4)
ˆi ( t ) = wT s i x (t )
(2-5)
There are two problems 1 For each w io , one can not make sure which s j ( t ) ( j = 1, 2," , M ) is recovered 2 To recover all si ( t ) for i = 1, 2," , M one have to try all different w . Since J CM is usually minimized by iteration, the selection of the initial value w i0 determines which s j ( t ) it will finally recovered 3 J CM is not convex, so it is possible the selection of w i won’t converge to desired signal
y ( t ) = as1 ( t ) + bs2 ( t )
(2-10)
The modulus of y ( t ) is found to be: | y ( t ) |2 =| as1 ( t ) + bs2 ( t ) |2 =| ae
jθ p
+ be
jφq 2
|
( ) ( ) =| ( a cos θ p + b cos φq ) + j ( a sin θ p + b sin φq ) |2
s1 ( t ) = e
jθ p
, p = 1, 2," , P , q = 1, 2," , Q
(2-7) (2-8)
and
s2 ( t ) = e
jφ p
Let the system is recovered by a constant modulus criterion, i.e. minimize the cost function:
(
)
(
)
(
)
(2-11) Note that if | y ( t ) | kept constant ∀p, q , then | θ p − φq | must keep constant ∀p, q . One example is:
s1 = e ± jπ
(2-12)
and
4
Where | θ p − φq |=
l =0 Lh −l
and wk = ∑ wk ,l z −l . The Lh and Lw are the length of
l =0
Lw
channel and equalizer, respectively. The FSE-CAM cost function is:
J FSE −CAM = Ex | y |2 −γ
T is symbol period and Ts is sample period. There are K samples in each symbol period, xi ( i = 1, 2," , K ), they be regarded as the output of K separated sub-
(2-6)
3
Where si ( t ) is transmitted signal, xi ( t ) is transmitted signal and H is the channel matrix. The signal si ( t ) is constant modulus signal, i.e.
{(
)}
2
(2-3)
Let w io be the optimal combination vector that minimize J CM , i.e.
2⎫ ⎧ 2 ⎪⎛ T ⎪ ⎞ = arg min Ex ⎨⎜ w i x ( t ) − γ ⎟ ⎬ wi ⎠ ⎭ ⎪⎝ ⎪ ⎩ Then the si ( t ) is recovered by:
{(
)}
2
(1-6)
Where
y ( t ) = ∑ hk ( z ) wk ( z ) x ( t )
k =1 K
(1-7)
It is proved in [3] that suppose the system is noiseless, if the length of equalizers are chosen such that ( Lw + 1) ( K − 1) ≥ Lh , then FSE-CAM is globally convergent if the
T
n (t ) = ⎡ ⎣ n1 ( t ) n2 ( t ) " nM ( t ) ⎤ ⎦ is AWGN The receiver tries to recover si ( t ) from the received vector x ( t ) by linear
T
combination, i.e.
J CM = Ex | y ( t ) |2 −γ
{(
)}
2
(2-9)
Where y ( t ) = w1 x1 ( t ) + w2 x2 ( t ) J CM = 0 means that y has constant modulus. We will see whether y is the mixture of s1 and s2 when it has constant modulus. The y ( t ) can be expressed by linear combination of si ( t ) since xi ( t ) is the linear combination of si ( t ) , i.e.
The first problem is common among blind recovery problem. While the second problem can be solved by modified cost function or by subtracting recovered data one by one from x ( t ) . The modified cost function method will be discussed in next section. A simple example of MIMO CMA Consider a simple MIMO model ⎛ x1 ( t ) ⎞ ⎛ s1 ( t ) ⎞ ⎜ ⎟ = H⎜ ⎟ ⎝ x2 ( t ) ⎠ ⎝ s2 ( t ) ⎠
J CM = Ex | y ( t ) |2 −γ
l =0 L
(1-2)
Where γ =
{ } ensures that equalization solution is a stationary point of the Ex {| s ( t ) | }
Ex | s ( t ) |4
2
{(
)}
K sub-channels satisfy the “length and zero” condition, i.e. 1 hk ,0 ≠ 0 for some 1 ≤ k ≤ K
2 3
hk , Lh ≠ 0 for some 1 ≤ k ≤ K
{hk ( z )}1