上位机与下位机的区别
上位机、下位机通信实例

上位机、下位机通信实例摘要:I.引言A.介绍上位机和下位机的概念B.阐述上下位机通信的重要性II.上位机和下位机的定义及功能A.上位机的定义和功能1.控制和监控系统2.数据处理和分析3.通信管理和故障诊断B.下位机的定义和功能1.实时数据采集和处理2.控制设备运行3.响应上位机的指令和请求III.上下位机通信实例A.通信方式1.串口通信2.以太网通信3.无线通信B.通信协议1.Modbus 协议2.Profinet 协议3.Can 总线协议C.通信应用实例1.工业自动化领域2.智能家居领域3.医疗设备领域IV.上下位机通信中遇到的问题及解决方案A.通信不稳定1.检查通信线路2.调整通信参数3.使用信号放大器B.数据传输延迟1.优化通信协议2.提高处理器速度3.使用更高速的通信方式C.安全问题1.使用加密算法2.建立访问控制机制3.定期更新安全补丁V.结论A.总结上下位机通信的重要性B.展望上下位机通信的未来发展趋势正文:在现代工业和科技领域中,上位机和下位机的通信变得越来越重要。
上位机主要负责控制、监控、数据处理、通信管理和故障诊断等任务,而下位机则负责实时数据采集、控制设备运行以及响应上位机的指令和请求。
二者之间的通信不仅要求高效、稳定,还要保证数据的安全性。
本文将介绍上位机和下位机的定义及功能,并通过实例分析不同的通信方式、通信协议以及可能遇到的问题和解决方案。
上位机主要负责对整个系统进行控制和监控,对采集到的数据进行处理和分析,以及对通信进行管理和故障诊断。
而下位机则是实时数据采集和处理的中心,它可以控制设备的运行,响应上位机的指令和请求,从而实现数据的传输和系统的控制。
在实际应用中,上下位机之间的通信方式有串口通信、以太网通信和无线通信等。
串口通信虽然传输速度较慢,但成本低、抗干扰能力强;以太网通信速度快、传输距离远,但成本相对较高;无线通信则适用于各种环境,但可能受到信号干扰和传输距离限制。
C#做一个简单的进行串口通信的上位机

C#做一个简单的进行串口通信的上位机1、上位机与下位机上位机相当于一个软件系统,可以用于接收数据、控制数据。
即可以对接收到的数据直接发送操控命令来操作数据。
上位机可以接收下位机的信号。
下位机是一个控制器,是直接控制设备获取设备状况的计算机。
上位机发出的命令首先给下位机,下位机再根据此命令解释成相应时序信号直接控制相应设备。
下位机不时读取设备状态数据(一般为模拟量),转换成数字信号反馈给上位机。
上位机不可以单独使用,而下位机可以单独使用。
2、串口通信串口相当于硬件类型的接口。
比如无线传感节点发送信号到汇聚节点,汇聚节点通过串口将数据传到计算机中的上位机中,上位机接收信息,并处理。
串口是按位(bit)发送和接收字节。
串口通信最重要的参数是波特率、数据位、停止位和奇偶校验。
对于两个进行通信的端口,这些参数必须匹配。
a,波特率:这是一个衡量符号传输速率的参数。
b,数据位:这是衡量通信中实际数据位的参数。
c,停止位:用于表示单个包的最后一位。
典型的值为1,1.5和2位。
d,奇偶校验位:在串口通信中一种简单的检错方式。
3、C#代码[c#] view plain copying System;ing System.Collections.Generic;ing ponentModel;ing System.Data;ing System.Drawing;ing System.Linq;ing System.Text;ing System.Threading.Tasks;ing System.Windows.Forms;ing System.IO.Ports;ing System.Diagnostics;space serial213.{14.public partial class Form1 : Form15.{16.SerialPort s = new SerialPort(); //实例化一个串口对象,在前端控件中可以直接拖过来,但最好是在后端代码中写代码,这样复制到其他地方不会出错。
上位机与下位机PPT课件

昆仑通态人机界面
15
昆仑通态人机界面
16
昆仑通态人机界面
17
本报告包括以下主要议题
¶ 上位机与下位机概念 ¶ 常见上位机及其组成 ¶ 常见下位机及其组成
18
常见下位机有:智能仪表、智能模块、变频器、称重 仪器、电力设备、板卡、PLC。
19
―ADAM-4000
RS485
ADAM-4000
7
两机如何通讯,一般取决于下位机。 通常上位机和下位机通讯可以采用不同的通讯协议, 可以有RS232的串口通讯,或者采用RS485串行通讯; 当用计算机和PLC通讯的时候不但可以采用传统的D形 式的串行通讯,还可以采用更适合工业控制的双线的 PROFIBUS-DP通讯; 采用封装好的程序开发工具就可以实现PLC和上位机的 通讯。当然可以自己编写驱动类的接口协议控制上位 机和下位机的通讯。
13
昆仑通态人机界面
TPC1061Ti,是一套以先进的Cortex-A8 CPU为核心( 主频600MHz)的高性能嵌入式一体化触摸屏。该产品 设计采用了10.2英寸高亮度TFT液晶显示屏(分辨率 1024×600),四线电阻式触摸屏式组态软件(运行版), 具备强大的图像显示和数据处理功能。
12
人机界面(HMI)产品的组成及工作原理
HMI软件一般分为两部分,即运行于 HMI硬件中的系统 软件和运行于PC机Windows操作系统下的画面组态软件 (组态王、力控、MCGS、WINCC FLEXIBLE)。 使用者都必须先使用HMI的画面组态软件制作“工程文 件”,再通过PC机和HMI 产品的通讯口(串口、USB、 网口),把编制好的“工程文件”下载到HMI的处理器 中运行。
4
5
上位机发出的命令首先给下位机,下位机再根据此命 令解释成相应时序信号直接控制相应设备。 下位机不时读取设备状态数据,转换成数字信号反馈 给上位机。 简言之如此,实际情况千差万别,但万变不离其宗。 上下位机都需要编程,都有专门的开发系统。
上位机和下位机的区别
上位机是指:人可以直接发出操控命令的计算机,一般是PC,屏幕上显示各种信号变化(液压,水位,温度等)。
下位机是直接控制设备获取设备状况的的计算机,一般是PLC/单片机之类的。
上位机发出的命令首先给下位机,下位机再根据此命令解释成相应时序信号直接控制相应设备。
下位机不时读取设备状态数据(一般模拟量),转化成数字信号反馈给上位机。
简言之如此,真实情况千差万别不离其宗。
上下位机都需要编程,都有专门的开发系统。
另外,上位机和下位机是通过通讯连接的“物理”层次不同的计算机,是相对而言的。
一般下位机负责前端的“测量、控制”等处理;上位机负责“管理”处理。
下位机是接收到主设备命令才执行的执行单元,即从设备,但是,下位机也能直接智能化处理测控执行;而上位机不参与具体的控制、仅仅进行管理(数据的储存、显示、打印......人机界面等方面)。
常见的DCS系统,“集中-分散(集散)系统”是上位机集中、下位机分散的系统。
在概念上,控制者和提供服务者是上位机.被控制者和被服务者是下位机.也可以理解为主机和从机的关系.但上位机和下位机是可以转换的.
两机如何通讯,一般取决于下位机。
TCP/IP一般是支持的。
但是下位机一般具有更可靠的独有通讯协议,购买下位机时,会带一大堆手册光盘,告诉你如何使用特有协议通讯。
里面会举大量例子。
一般对编程人员而言一看也就那么回事,使用一些新的API罢了。
多语言支持功能模块,一般同时支持数种高级语言为上位机编程。
上位机、下位机通信实例
上位机、下位机通信实例摘要:1.上位机与下位机通信的基本概念2.上位机与下位机通信的方式3.通信实例介绍4.通信实例的应用场景5.通信实例的优势与不足正文:一、上位机与下位机通信的基本概念上位机和下位机通信是指在计算机控制系统中,上位机(通常为控制中心或主计算机)与下位机(通常为现场控制器或执行器)之间的信息交换。
上位机主要负责数据处理、逻辑控制和决策等任务,而下位机则主要负责现场设备的运行控制。
两者之间的通信是实现自动化控制系统正常运行的关键。
二、上位机与下位机通信的方式上位机与下位机之间的通信方式主要有串行通信、并行通信和网络通信等。
其中,串行通信和并行通信是硬件层面的通信方式,而网络通信则是基于计算机网络的通信方式。
1.串行通信:串行通信是指上位机与下位机之间通过串行接口进行数据传输。
它具有线路简单、成本低的优点,但传输速率相对较低。
2.并行通信:并行通信是指上位机与下位机之间通过并行接口进行数据传输。
它具有传输速率快的优点,但需要较多的线路和硬件资源。
3.网络通信:网络通信是指上位机与下位机之间通过网络进行数据传输。
它可以实现远程控制和实时数据交互,但需要建立稳定的网络环境和较高的网络带宽。
三、通信实例介绍以下是一个典型的上位机与下位机通信实例:假设有一个自动化生产线系统,上位机负责生产任务的分配和调度,下位机负责具体的设备运行控制。
在这个系统中,上位机需要实时获取下位机的运行状态和数据,并根据生产任务进行调整。
同时,下位机也需要根据上位机的指令来执行相应的操作。
四、通信实例的应用场景上位机与下位机通信实例在许多领域都有应用,如工业自动化、楼宇自控、智能交通等。
在这些领域中,上位机与下位机通信实例可以实现设备的远程监控、实时数据采集和智能决策等功能,从而提高系统的运行效率和可靠性。
五、通信实例的优势与不足上位机与下位机通信实例具有以下优势:1.提高系统的自动化水平,降低人工干预成本。
2.实现远程监控和控制,方便管理人员进行决策。
工控基础知识

式是多台 DTU 对应一个数据中心。但是上位机和下位机不一定都一一对应,他们可
以是一个下位机对一个或多个上位机,也可以是一个上位机对应一个或多个下
位机,具体的对应方式要视应用而定。 2)什么是数据中心? 数据中心是指对下位机回传的信息进行 采集、汇总和处理,并对下位机进行一定
SCADA 系统的远程终端设备可以用各种不同的硬件和软件来实现。这取决于被控现场的性质、系 统的复杂性、对数据通信的要求、实时报警报告、模拟信号测量精度、状态监控、设备的调节控制和 开关控制。 RTU 的主要功能 (1)采集状态量并向远方发送,带有光电隔离,遥信变位优先传送; (2)采集数据量并向远方发送,带有光电隔离; (3)直接采集系统工频电量,实现对电压、电流、有功、无功的测量并向远方发送 ,可计算正反向电 度; (4)采集脉冲电度量并向远方发送,带有光电隔离; (6)接收并执行遥控及返校; (7)程序自恢复; (8)设备自诊断(故障诊断到插件级); (9)设备自调;
脉冲技术 pulse technique 脉冲信号的变换、产生和应用技术。脉冲信号的波形在某一时间内有突发性和断续性的特点,几种理 想的脉冲信号波形有方波、矩形波、三角波、尖顶脉冲波和锯齿波等。脉冲技术在电子技术中起着非 常重要的作用,它已广泛应用于电子计算机、通信、雷达、电视、自动控制、遥控遥测、无线电导航 和测量技术等领域。常见的线性波形变换电路有微分电路和积分电路。另外还有非线性波形变换电路。 脉冲波产生电路含有晶体管和电容器或电感器 。 晶体管用作开关,它的通、断可以改变电路的工作 状态。电容、电感用作惰性元件,可以形成电路中的暂态特性。例如能产生矩形波或方波的无稳态自 激多谐振荡器,需要外触发的单稳态触发电路和双稳态触发电路(见触发器)。能产生锯齿波的锯齿 波发生器和占空比很大的窄脉冲间歇振荡器都属于这类电路。它们可以完成诸如同步、分频、计数、 移位寄存 、电压比较、延时、扫描、模-数和数-模转换、选通、脉冲编码等功能。
上位机与下位机的区别
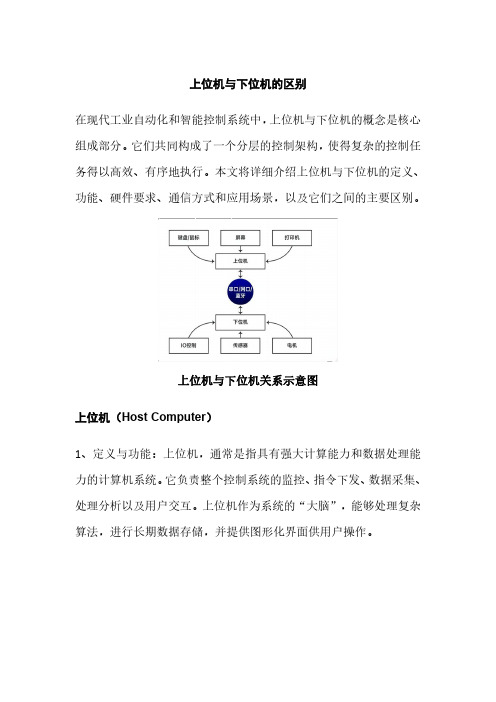
上位机与下位机的区别在现代工业自动化和智能控制系统中,上位机与下位机的概念是核心组成部分。
它们共同构成了一个分层的控制架构,使得复杂的控制任务得以高效、有序地执行。
本文将详细介绍上位机与下位机的定义、功能、硬件要求、通信方式和应用场景,以及它们之间的主要区别。
上位机与下位机关系示意图上位机(Host Computer)1、定义与功能:上位机,通常是指具有强大计算能力和数据处理能力的计算机系统。
它负责整个控制系统的监控、指令下发、数据采集、处理分析以及用户交互。
上位机作为系统的“大脑”,能够处理复杂算法,进行长期数据存储,并提供图形化界面供用户操作。
上位机控制示意框图2、硬件要求:上位机的硬件通常包括个人电脑、工业PC或服务器。
这些设备配备有高性能的CPU、较大的内存和存储空间,以及多种I/O 接口。
它们运行着完整的操作系统,如Windows、Linux或其他实时操作系统,以支持复杂的应用程序和网络服务。
3、通信方式:上位机通过各种通信接口与下位机进行数据交换,这些接口包括串行端口(如RS232、RS485)、USB、以太网、WLAN等。
上位机支持多种工业通信协议,如Modbus、Profibus、CANopen、EtherCAT、TCP/IP等,以实现与下位机的互联互通。
4、应用场景:上位机广泛应用于工业自动化、过程控制、监控系统、数据采集和分析、智能建筑管理等领域。
它们通常位于控制系统的最高层,负责协调和管理整个系统的运行。
下位机(Slave Device)1、定义与功能:下位机是指在控制系统中直接与传感器、执行器等硬件相连的设备或控制器。
它负责执行上位机发出的具体控制指令,如开关信号的输出、模拟量的调节、数据的采集等。
下位机通常执行简单的逻辑判断和实时控制任务。
2、硬件要求:下位机的硬件通常包括微控制器、PLC、嵌入式控制板等。
这些设备具有一定的计算能力,但远不如上位机强大。
它们可能运行着简化的操作系统或无操作系统(裸机),并且具有与传感器、执行器直接连接的I/O接口。
上位机与下位机的定义

学习的路上,越努力越渺小。
——单片机初学者有很多刚从学校踏入社会的职场新手,在听到前辈们讨论:我们上位机要实现这个功能,你们下位机需要这样配合,之类的话题时都是一脸的蒙:什么是上位机、什么又是下位机。
其实在学校都是接触过,只是不知道其在职场应用中的专业名词而已。
上位机通常是指可以直接发出控制命令的计算机,一般是PC/host computer/master computer/upper computer。
通常上位机存在可视化的操作界面,例如显示屏,便于使用者进行控制操作。
下位机是直接控制设备、获取设备状态的计算机,一般是PLC、STM32等。
通常下位机不为用户所知,有点类似幕后实施者。
上位机与下位机从概念上分析:上位机属于控制者,下位机属于被控制者;从执行角度去分析:上位机属于命令发布者,下位机属于命令实施者。
一般工作的流程是:用户通过界面、语音或者按键等操作将用户意图通知给上位机,上位机将用户意图转换为操作命令,通过两者间的通信协议将操作命令传递给下位机,下位机再根据命令去控制对应的相关设备。
上位机与下位机之间的通信通常取决于下位机,通过下位机支持的通信接口,例如:UART、SPI、SCI、I2C、CAN等接口。
基于底层接口对通信协议进行设计扩展,可参考各接口标准协议进行开发,亦可根据需求自定义通信协议。
不论是上位机还是下位机,都是可编程设计的。
上位机编程,可以选用不同的编程语言,比如:C/C++、C#、JAVA、LABVIEW等。
不同的编程语言适用于不同的编程软件,实现出不同风格的监控显示界面。
当然使用何种编程语言,主要根据个人爱好、水平以及公司需求。
下位机编程通常是嵌入式编程,在硬件资源上进行代码设计,通常使用汇编、C语言、VHDL等等。
下面以一实例描述下上、下位机在项目中的实际功能应用:上位机:IMAX6,ARM芯片下位机:STM32F091RC功能:根据电源电压的变化控制LED0、LED1,提醒操作者工作状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上位机是指人可以直接发出操控命令的计算机,一般是PC,屏幕上显示各种信号变化(液压,水位,温度等)。
下位机是直接控制设备获取设备状况的计算机,一般是PLC/单片机之类的。
上位机发出的命令首先给下位机,下位机再根据此命令解释成相应时序信号直接控制相应设备。
下位机不时读取设备状态数据(一般为模拟量),转换成数字信号反馈给上位机。
简言之如此,实际情况千差万别,但万变不离其宗:上下位机都需要编程,都有专门的开发系统。
在概念上
控制者和提供服务者是上位机
被控制者和被服务者是下位机
也可以理解为主机和从机的关系
但上位机和下位机是可以转换的
两机如何通讯,一般取决于下位机。
TCP/IP一般是支持的。
但是下位机一般具有更可靠的独有通讯协议,购买下位机时,会带一大堆手册光盘,告诉你如何使用特有协议通讯,里面会举大量例子,一般对编程人员而言一看也就那么回事,使用一些新的API罢了。
多语言支持功能模块,一般同时支持数种高级语言为上位机编程。
通常上位机和下位机通讯可以采用不同的通讯协议,可以有RS232的串口通讯,或者采用RS485串行通讯,当用计算机和PLC通讯的时候不但可以采用传统的D形式的串行通讯,还可以采用更适合工业控制的双线的PROFIBUS-DP通讯,采用封装好的程序开发工具就可以实现PLC和上位机的通讯。
当然可以自己编写驱动类的接口协议控制上位机和下位机的通讯。
果博东方,果博东方娱乐http://www.92gb.ws d2sA33Iz2I2i。