上位机与下位机之间通信协议格式
上位机与下位机之间的通信编程
上位机与下位机之间的通信编程在现代工业自动化系统中,上位机和下位机之间的通信起着至关重要的作用。
上位机是指控制整个系统的计算机,而下位机则是指负责执行具体任务的设备或机器。
通过上位机与下位机之间的通信,上位机可以向下位机发送指令,控制其工作状态,并实时获取下位机的数据反馈。
本文将探讨以上位机与下位机之间的通信编程技术。
1. 通信协议在上位机与下位机之间进行通信时,需要定义一种通信协议,以确保双方能够正确地交换数据。
常用的通信协议包括Modbus、Profibus、CAN等。
这些协议定义了数据的格式、传输方式以及错误处理机制,使得上位机和下位机能够按照统一的规范进行通信。
2. 通信接口上位机与下位机之间的通信可以通过串口、以太网、无线网络等多种方式实现。
在编程时,需要选择合适的通信接口,并根据接口特点进行相应的编程配置。
例如,在使用串口进行通信时,需要配置串口的波特率、数据位、停止位等参数;在使用以太网进行通信时,需要配置IP地址、端口号等参数。
3. 数据交换在通信过程中,上位机和下位机需要交换各种类型的数据,如控制指令、传感器数据、报警信息等。
为了确保数据的准确性和可靠性,通常会使用特定的数据格式进行数据交换。
常见的数据格式包括二进制、ASCII码、JSON等。
在编程时,需要根据数据格式的要求进行数据的打包和解包操作。
4. 通信流程通信流程是指上位机与下位机之间通信的具体步骤和顺序。
在通信编程中,需要明确通信流程,确保上位机和下位机能够按照预定的顺序进行通信。
通常,通信流程包括建立连接、数据交换、关闭连接等步骤。
5. 异常处理在通信过程中,可能会出现各种异常情况,如通信超时、通信中断、数据错误等。
为了保证通信的稳定性和可靠性,需要在编程时对这些异常情况进行处理。
常见的异常处理方式包括重新连接、重发数据、错误提示等。
6. 安全性在工业自动化系统中,数据的安全性至关重要。
为了保护通信过程中的数据安全,需要在通信编程中加入相应的安全机制。
上位机与下位机通信设计
1 引言现代化集中管理需要对现场数据进行统计、分析、制表、打印、绘图、报警等,同时,又要求对现场装置进行实时控制,完成各种规定操作,达到集中管理的目的。
加之单片机的计算能力有限,难以进行复杂的数据处理。
因此在功能比较复杂的控制系统中,通常以PC机为上位机,单片机为下位机,由单片机完成数据的采集及对装置的控制,而由上位机完成各种复杂的数据处理及对单片机的控制。
2 PC机与单片机8051之间的通信特点在工业控制系统中,各种数据的采集和执行机构的控制都是由下位机或探测站来完成。
由于单片机具有体积小、价格低廉、可应用于恶劣工业环境的特点,在分布式控制系统中大多采用单片机作为下位机来进行数据采集和现场控制。
在这些应用中,单片机只是直接面向被控对象底层。
而对采集到的数据进行进一步分析和处理的工作是由功能强大的主控PC机来完成的。
因此,PC机和单片机之间就有着大量的数据交换。
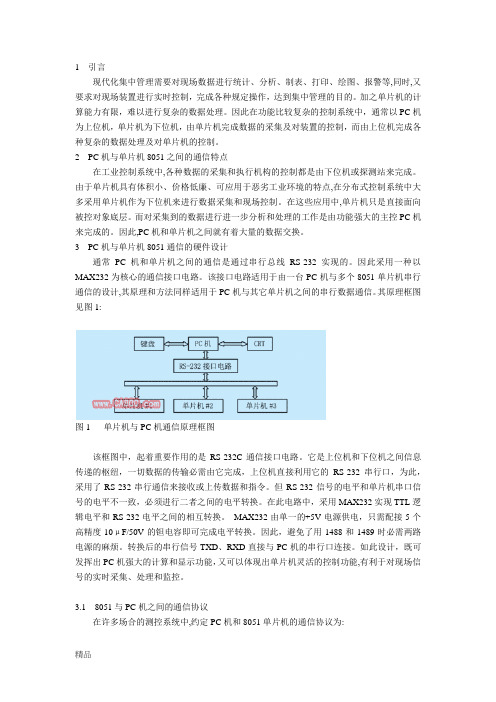
3 PC机与单片机8051通信的硬件设计通常PC机和单片机之间的通信是通过串行总线RS-232实现的。
因此采用一种以MAX232为核心的通信接口电路。
该接口电路适用于由一台PC机与多个8051单片机串行通信的设计,其原理和方法同样适用于PC机与其它单片机之间的串行数据通信。
其原理框图见图1:图1 单片机与PC机通信原理框图该框图中,起着重要作用的是RS-232C通信接口电路。
它是上位机和下位机之间信息传递的枢纽,一切数据的传输必需由它完成,上位机直接利用它的RS-232串行口,为此,采用了RS-232串行通信来接收或上传数据和指令。
但RS-232信号的电平和单片机串口信号的电平不一致,必须进行二者之间的电平转换。
在此电路中,采用MAX232实现TTL逻辑电平和RS-232电平之间的相互转换。
MAX232由单一的+5V电源供电,只需配接5个高精度10μF/50V的钽电容即可完成电平转换。
因此,避免了用1488和1489时必需两路电源的麻烦。
总线采集器-上位机与下位机通讯协议(单点)
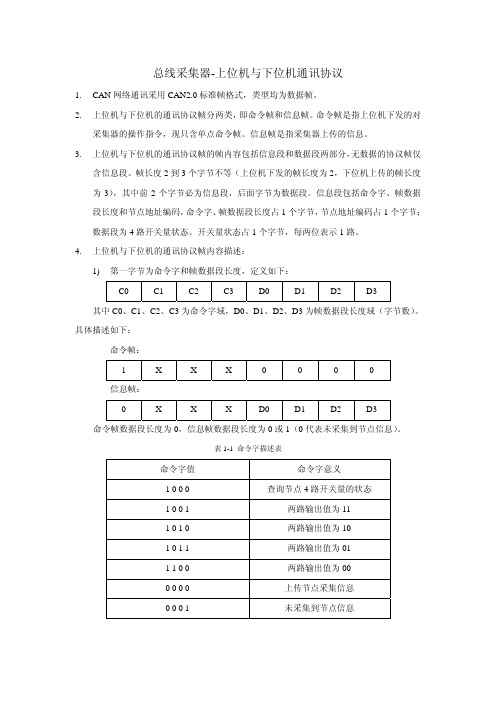
总线采集器-上位机与下位机通讯协议1.CAN网络通讯采用CAN2.0标准帧格式,类型均为数据帧。
2.上位机与下位机的通讯协议帧分两类,即命令帧和信息帧。
命令帧是指上位机下发的对采集器的操作指令,现只含单点命令帧。
信息帧是指采集器上传的信息。
3.上位机与下位机的通讯协议帧的帧内容包括信息段和数据段两部分,无数据的协议帧仅含信息段。
帧长度2到3个字节不等(上位机下发的帧长度为2,下位机上传的帧长度为3),其中前2个字节必为信息段,后面字节为数据段。
信息段包括命令字、帧数据段长度和节点地址编码,命令字、帧数据段长度占1个字节,节点地址编码占1个字节;数据段为4路开关量状态。
开关量状态占1个字节,每两位表示1路。
4.上位机与下位机的通讯协议帧内容描述:1)第一字节为命令字和帧数据段长度,定义如下:C0 C1 C2 C3 D0 D1 D2 D3 其中C0、C1、C2、C3为命令字域,D0、D1、D2、D3为帧数据段长度域(字节数)。
具体描述如下:命令帧:1 X X X 0 0 0 0信息帧:0 X X X D0 D1 D2 D3命令帧数据段长度为0,信息帧数据段长度为0或1(0代表未采集到节点信息)。
表1-1 命令字描述表命令字值命令字意义1 0 0 0 查询节点4路开关量的状态1 0 0 1 两路输出值为111 0 1 0 两路输出值为101 0 1 1 两路输出值为011 1 0 0 两路输出值为000 0 0 0 上传节点采集信息0 0 0 1 未采集到节点信息2)第二个字节为采集器节点地址编码(16进制表示)。
采集器节点地址固定,上位机软件需提供节点添加功能,添加内容为节点地址。
上传采集数据时此部分为采集器自身节点地址,上位机可据此发送反馈的命令帧;适配器节点地址为0x7F(127),采集器节点地址编码从0x00(0)到0x7E(126),最大支持127个采集器。
3)第三个字节为采集器开关量数据值。
上位机与下位机之间通信协议格式
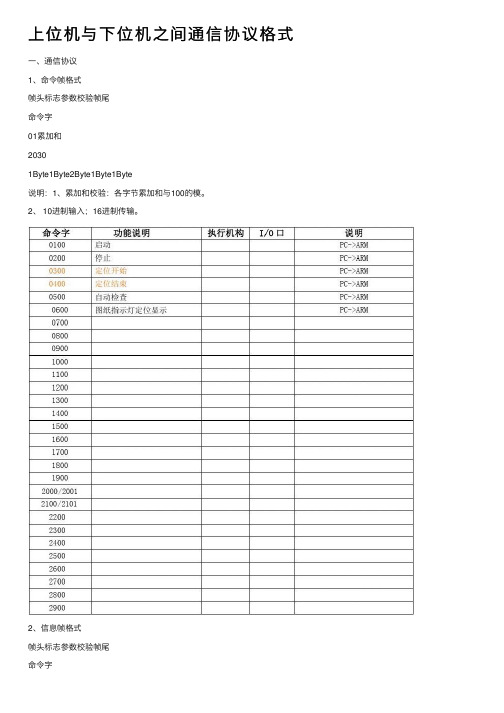
上位机与下位机之间通信协议格式⼀、通信协议1、命令帧格式帧头标志参数校验帧尾命令字01累加和20301Byte1Byte2Byte1Byte1Byte说明:1、累加和校验:各字节累加和与100的模。
2、 10进制输⼊;16进制传输。
2、信息帧格式帧头标志参数校验帧尾命令字203002累加和1Byte1Byte2Byte1Byte1Byte说明:1、累加和校验:各字节累加和与100的模。
2、 10进制输⼊;16进制传输。
3、数据帧格式(⽂件mokuaideng.txt (模块指⽰灯地址) 20 Byte )帧头标志校验帧尾203003累加和数据数据1Byte16Byte1Byte1Byte1Byte标志:03 数据帧⽂件mokuaideng.txt (模块指⽰灯地址) 20 Byte 04 数据帧⽂件daotongbiao.txt (导通表) 40 Byte 05 数据帧⽂件canshu.txt (控制参数) 6 Byte06 数据帧校验⽂件mokuaideng.txt (模块指⽰灯地址) 20 Byte 07 数据帧校验⽂件daotongbiao.txt (导通表) 40 Byte 08 数据帧校验⽂件canshu.txt (控制参数) 6 Byte4、信息帧格式定位物理针位下位机-》上位机上位机-》下位机点亮指⽰灯帧头标志参数校验帧尾203011累加和物理针位1Byte1Byte2Byte1Byte1Byte说明:1、累加和校验:各字节累加和与100的模。
2、 10进制输⼊;16进制传输。
标志位 13 ,单点检测判断单点导通关系是否真确5、信息帧格式下位机-》上位机⾃检、线检测帧头标志参数1校验帧尾203012累加和起始针位1Byte1Byte2Byte1Byte1Byte参数2终点针位2Byte参数3状态1Byte状态:00 导通 01 断路02 短路/错路0308 检测完成09 读485数据超时,485通信故障说明:1、累加和校验:各字节累加和与100的模。
PLC通讯MODBUS协议的应用及编程
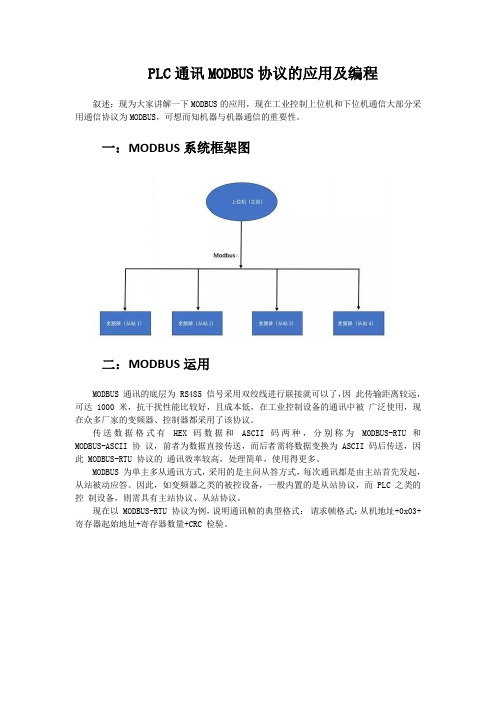
PLC通讯MODBUS协议的应用及编程叙述:现为大家讲解一下MODBUS的应用,现在工业控制上位机和下位机通信大部分采用通信协议为MODBUS,可想而知机器与机器通信的重要性。
一:MODBUS系统框架图二:MODBUS运用MODBUS 通讯的底层为 RS485 信号采用双绞线进行联接就可以了,因此传输距离较远,可达 1000 米,抗干扰性能比较好,且成本低,在工业控制设备的通讯中被广泛使用,现在众多厂家的变频器、控制器都采用了该协议。
传送数据格式有HEX 码数据和ASCII 码两种,分别称为MODBUS-RTU 和MODBUS-ASCII 协议,前者为数据直接传送,而后者需将数据变换为 ASCII 码后传送,因此 MODBUS-RTU 协议的通讯效率较高,处理简单,使用得更多。
MODBUS 为单主多从通讯方式,采用的是主问从答方式,每次通讯都是由主站首先发起,从站被动应答。
因此,如变频器之类的被控设备,一般内置的是从站协议,而 PLC 之类的控制设备,则需具有主站协议、从站协议。
现在以 MODBUS-RTU 协议为例,说明通讯帧的典型格式:请求帧格式:从机地址+0x03+寄存器起始地址+寄存器数量+CRC 检验。
正常响应帧格式:从机地址+0x03+字节数+寄存器值+CRC 检验三:PLC 编程时应该注意以下信息:从机地址:主站发送帧中,该地址表示目标接收从机的地址;从机应答帧中,表示本机地址;从机地址的设定范围为 1~247,0 为广播通信地址。
操作类型:表示读或写操作;0x1=读线圈操作;0x03=读寄存器操作;0x05=改写线圈操作;0x06=改写寄存器操作。
对于变频器而言,只支持 0x03 读、0x06 写的操作。
寄存器起始地址:表示对从机中要访问的寄存器地址,对于 MD280、MD320 系列变频器的访问时,对应的就是"功能码号"、"命令地址"、"运行参数地址";数据个数:即从"寄存器起始地址"开始要连续访问的数据个数,对于寄存器变量,以 word 为单位。
上位机和下位机的通讯协议
上位机和下位机的通讯协议是指在工业自动化等领域中,上位机(如计算机)与下位机(如PLC、传感器、执行器等控制设备)之间进行数据交换和通信所使用的协议。
常见的上位机和下位机通讯协议有以下几种:1. Modbus协议:- Modbus是一种串行通信协议,广泛应用于工业自动化领域。
-它定义了上位机与下位机之间的通信规范和数据格式,支持多种物理介质,如串口和以太网。
2. Profibus协议:- Profibus是一种广泛使用的工业现场总线协议。
-它兼容多种数据传输方式,包括串行通信和以太网,可实现上位机与下位机之间的实时数据传输和远程控制。
3. CAN(Controller Area Network)协议:- CAN是一种主要用于车载通信和工业控制系统的通信协议。
-它提供高可靠性、实时性和抗干扰能力,适用于需要快速和可靠数据传输的环境。
4. OPC(OLE for Process Control)协议:- OPC是一种开放标准的数据传输协议,用于连接上位机和下位机之间的数据通信。
-它允许不同厂家的设备和软件能够互相通信,实现数据采集、监控和控制功能。
5. Ethernet/IP协议:- Ethernet/IP是在以太网上运行的工业自动化通信协议。
-它基于TCP/IP协议栈,并使用标准以太网进行数据传输,实现上位机与下位机之间的实时数据交换和远程控制。
需要根据具体应用场景和设备要求选择合适的通讯协议。
在设计和实施通讯系统时,应确保上位机和下位机之间的通信协议相容性,同时考虑数据传输的速度、稳定性和安全性等方面的要求。
[备注:以上列举的通讯协议仅为常见示例,实际应用中可能涉及更多的协议类型和标准。
在具体项目中,请参考相关标准和设备提供商的文档,并咨询专业人士的建议。
]。
到上位机的通讯协议
到上位机的通讯协议
上位机与下位机之间的通讯协议通常是通过串行通讯或者网络
通讯进行的。
串行通讯协议包括常见的RS-232、RS-485、Modbus等,而网络通讯协议则包括TCP/IP、UDP、HTTP等。
这些通讯协议在工
业控制、自动化领域中被广泛应用。
在串行通讯中,RS-232是一种较为常见的标准,它定义了串行
通讯的物理接口和信号规范。
RS-485则是一种多点通讯的标准,适
用于远距离通讯和多节点通讯。
Modbus是一种常见的工业领域通讯
协议,包括Modbus RTU和Modbus TCP两种形式,用于在工业控制
系统中传输数据。
在网络通讯中,TCP/IP协议是互联网和局域网中最常见的协议
之一,它提供了可靠的、面向连接的数据传输。
UDP协议则是一种
无连接的通讯协议,适用于实时性要求较高的数据传输。
HTTP协议
是超文本传输协议,用于在客户端和服务器之间传输超文本。
除了上述常见的通讯协议外,还有许多其他的通讯协议,如
CAN总线、Ethernet、Profibus等,它们在不同的应用场景中发挥
着重要作用。
总的来说,不同的通讯协议适用于不同的应用场景和需求,选择合适的通讯协议对于建立可靠的上位机与下位机通讯至关重要。
上位机和下位机的通讯协议
上位机和下位机的通讯协议随着信息技术的发展,计算机系统在各个领域中的应用越来越广泛。
在许多实际应用中,需要将上位机和下位机进行通信,以完成数据的传输和控制。
上位机和下位机是指在一个系统中,上位机负责处理数据和控制逻辑,而下位机则负责执行具体指令和操作硬件设备。
两者之间的通信协议起着非常重要的作用,它决定了数据的传输方式、格式和规则。
一种常见的上位机和下位机通信协议是Modbus协议。
Modbus 协议是一种串行通信协议,被广泛应用于工业自动化领域。
它定义了上位机和下位机之间的通信格式和规则,支持多种物理传输介质,如串口、以太网等。
Modbus协议采用主从结构,上位机作为主机发送指令,下位机作为从机接收并执行指令。
在Modbus协议中,上位机可以向下位机发送读取命令,以获取下位机的数据;也可以发送写入命令,以向下位机发送控制指令。
下位机接收到上位机的命令后,根据指令的类型和参数进行相应的处理,并将结果返回给上位机。
除了Modbus协议,还有其他许多通信协议可用于上位机和下位机的通信,如CAN总线协议、RS485协议等。
这些协议各有特点,适用于不同的应用场景。
CAN总线协议是一种广泛应用于汽车电子领域的通信协议。
它采用分布式的总线结构,可以连接多个下位机设备。
CAN总线协议具有高速传输、抗干扰能力强等优点,适用于复杂的汽车电子控制系统。
RS485协议是一种串行通信协议,适用于多点通信。
它可以连接多个下位机设备,支持长距离传输,具有抗干扰能力强的特点。
RS485协议广泛应用于工业自动化、楼宇自控等领域。
除了这些通信协议,还有许多其他的协议可供选择,如Profibus、DeviceNet等。
这些协议根据不同的应用场景和需求,提供了丰富的功能和灵活的配置。
在设计上位机和下位机通信协议时,需要考虑以下几个方面:1. 通信速度:根据实际需求确定通信速率,以保证数据的及时传输。
2. 数据格式:确定数据的编码格式和传输方式,以确保数据的正确解析和处理。
上位机和下位机通信
上位机和下位机通信
简介
在嵌入式系统中,我们经常需要将上位机和下位机进行通信。
上位机可以是
PC机、嵌入式开发板等,下位机可以是单片机、FPGA、DSP等。
本文将介绍上位
机和下位机通信的一般流程和具体实现方法。
通信流程
上位机和下位机之间的通信一般分为以下几个步骤:
1.建立连接:上位机通过串口、USB、以太网等方式建立与下位机的物
理连接。
2.协议定义:双方需要定义好通信协议,即数据格式和通信规则。
3.数据传输:上位机向下位机发送数据,下位机接收数据并进行处理,
然后向上位机返回数据。
4.断开连接:通信结束后,双方需要关闭物理连接。
具体的通信流程如下图所示:
graph LR
A(建立连接) --> B(协议定义)
B --> C(数据传输)
C --> D(断开连接)
常见的通信协议
在上位机和下位机之间通信时,需要定义好数据格式和通信规则,即通信协议。
常见的通信协议有以下几种:
1. ASCII码协议
ASCII码协议是一种文本协议,数据使用ASCII码表示,每个数据项使用特定
的分隔符分开。
这种协议实现简单,但数据量大,传输速度较慢。
常用于调试和测试。
例如,上位机向下位机发送。
与上位机通讯协议
1. 通讯协议
1.1 通讯设置:
数据格式:
起始位+ 8 位数据位+ 1位停止位,奇校验;
波特率:
19200 baud
1.2 50E向上位机发送的实时数据:
发送数据:5字节格式,每秒钟60个包,第7位为同步位。
发送数据:每3个字节为1包,前3包发送的数据为存储开始的时间,以后的为存储的脉率和血氧值。
1.3.1 发送时间的协议
1.3.2 发送数据的协议
发送数据:每3个字节为1包。
格式:存储开始的时间(3包) +存储的字节数(1包)+ 存储的脉率和血氧值;
1.3.1 发送时间的协议
1.3.2 发送存储的字节数的协议
1.3.2 发送数据的协议
1.4 上位机向50E发送的命令:。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、通信协议
1、命令帧格式
帧头标志参数校验帧尾
命令字
01累加和
2030
1Byte1Byte2Byte1Byte1Byte
说明:1、累加和校验:各字节累加和与100的模。
2、 10进制输入;16进制传输。
2、信息帧格式
帧头标志参数校验帧尾
命令字
2030
02累加和
1Byte1Byte2Byte1Byte1Byte
说明:1、累加和校验:各字节累加和与100的模。
2、 10进制输入;16进制传输。
3、数据帧格式 (文件mokuaideng.txt (模块指示灯地址) 20 Byte )
帧头标志校验帧尾203003累加和数据数据1Byte
16Byte
1Byte
1Byte
1Byte
标志:03 数据帧 文件mokuaideng.txt (模块指示灯地址) 20 Byte 04 数据帧 文件daotongbiao.txt (导通表) 40 Byte 05 数据帧 文件canshu.txt (控制参数) 6 Byte
06 数据帧 校验文件mokuaideng.txt (模块指示灯地址) 20 Byte 07 数据帧 校验文件daotongbiao.txt (导通表) 40 Byte
08 数据帧 校验文件canshu.txt (控制参数) 6 Byte
4、信息帧格式
定位物理针位 下位机-》上位机 上位机-》下位机 点亮指示灯
帧头标志参数校验帧尾203011累加和物理针位1Byte
1Byte
2Byte
1Byte
1Byte
说明:1、累加和校验:各字节累加和与100的模。
2、 10进制输入;16进制传输。
标志位 13 ,单点检测 判断单点导通关系是否真确
5、信息帧格式
下位机-》上位机 自检、线检测
帧头标志参数1校验帧尾203012累加和起始针位1Byte
1Byte
2Byte
1Byte
1Byte
参数2终点针位2Byte
参数3状态1Byte
状态:00 导通 01 断路
02 短路/错路
03
08 检测完成
09 读485数据超时,485通信故障
说明:1、累加和校验:各字节累加和与100的模。
2、 10进制输入;16进制传输。
485通信协议
主机发送
帧头从机地址
校验帧尾203000累加和xx 1Byte
1Byte
1Byte
1Byte
1Byte
主机地址
针高位针低位xx xx 1Byte
1Byte
命令字xx 1Byte
命令字:01 读开关量 02 读模拟量值 主机地址为:00 从机地址:01-255 针高位:00-99
针低位 00-28 注:总针数128 校验:和除100取余数
注意:从机地址:00 广播发送
针高位 针低位 全为00 则需读1-128针数据
从机发送:
帧头从机地址
校验帧尾203000累加和xx 1Byte
1Byte
1Byte
1Byte
1Byte
主机地址
针高位针低位xx xx 1Byte
1Byte
命令字xx 1Byte
命令字:01 读开关量 02 读模拟量值 08 起始端复位 09 发送结束 从机地址=0 广播发送,开始检测
03:继电器开 04 继电器关 05 开始按钮 06 停止按钮 07 错误指示灯。