基于DSP的永磁交流伺服控制系统研究
基于DSP的永磁交流伺服控制系统研究
第 41卷 第 1期
20 0 7年 1 月
电 力 电子 技 术
P we e to c o rEl cr nis
Vo . 141,No. 1
Jn ay 2 0 a u r ,0 7
基于 D P的永磁交流伺服控制系统研究 S
徐 艳 平 , 永 飘 , 彦 儒 刘 钟
a d s f a e i p e e td i eal x e me t lr s l r v h a in i f te h r wa e a d s f r e in i h n ot r s r s n e n d ti E p r n a e u t p o e t e r t a t o h a d r n ot e d sg n t e w . i s ol y wa p r a e t AC s r o s se u ig T 3 0 2 1 . h o t l s se h s f s r s o s n o d p r r a c n e h e m n n e v y tm sn MS 2 F 8 2 T e c n r y t m a a t e p n e a d g o ef m n e u d r t e o o se d n y a c sae . ta y a d d n mi tt s Ke wo d : tr ai g c re ts r o s s m;s f wa ;h r r ;d sg / e a e t g e y c r n u t r y r s a e t u r n e v ・y t l n n e o r t e a d wa e e in p r n n n ts n h o o smoo m ma
中 图 分 类 号 : M 5 T 31 文献标识码 : A 文 章 编 号 :O 0 1 0 ( 0 7 O — 0 ' 0 10 — 0 X 2 0 ) 10 4 — 3 2
基于DSP的交流永磁同步电机伺服系统的研究的开题报告

基于DSP的交流永磁同步电机伺服系统的研究的开题报告一、选题背景及研究意义随着电力电子技术的不断发展,交流永磁同步电机(PMSM)因其具有高效、高转矩密度、低噪音和高控制精度等特点而广泛应用于各种电力系统中,成为工业界研究的热点之一。
PMSM的控制系统是整个电机系统中最关键的部分,直接影响电机性能。
目前,PMSM控制系统普遍采用数字信号处理器(DSP)作为核心控制器,进行高精度的执行器位置、速度和电流控制。
因此,基于DSP的PMSM伺服系统在电力领域中具有重要的研究价值和实际应用价值。
二、研究内容和方法本研究将围绕基于DSP的PMSM伺服系统的设计和优化展开,具体内容包括以下几个方面:1. PMSM的特性分析和建模:分析PMSM的特性与动态响应特点,建立数学模型,为后续控制系统设计和仿真提供理论基础。
2. 基于DSP的数字控制系统设计:采用DSP作为核心控制器,构建PMSM的控制系统,包括执行器位置、速度和电流控制等模块,实现PMSM的高精度控制。
3. 优化控制算法研究:研究改进的控制算法,通过对DSP系统进行实时反馈控制,提高控制精度和系统动态响应特性。
4. 系统模拟和实验验证:采用MATLAB和Simulink进行系统仿真,并通过实验验证PMSM伺服系统的性能和实际控制效果。
三、预期成果和意义本研究预期达到以下成果:1. 建立PMSM的数学模型和基于DSP的数字控制系统,实现高精度的执行器位置、速度和电流控制。
2. 研究改进的控制算法,提高系统控制精度和动态响应特性。
3. 通过系统仿真和实验验证,掌握PMSM伺服系统的控制特性,为工业界实际应用提供可靠的理论指导。
本研究对于提高我国电力系统高效、低噪音、高控制精度的控制系统方面具有重要的理论和实际应用价值,具有重要的国家经济和社会发展意义。
基于DSP的永磁伺服系统设计和实现
基于DSP的永磁伺服系统设计和实现岑海洪;杨艳娟【摘要】AC PMSM can adopt field oriented or direct torque control method.The field-orientedcontrol method and hardware architecture is analyzed to achieve its digital control. Us ing the Texas Instru-ments TMS320F2812 digital signal processor as the master chip,the three closed-loop servo control systemis designed in the CCS integrated development platform,First the overall hardware design and the major cir-cuit design is introduced and the key problems in circuit design are analyzedAnd then the overall softwareframe and specific design for every module is presented as well as a PI controller with integral correction isdesigned to realize three closed-loop control of system,thus preferable control effect is obtained.%交流永磁同步电机可以采用磁场定向控制或直接转矩控制方法,分析了磁场定向控制方法和硬件结构,实现其数字控制.使用德州仪器公司的TMS320F2812数字信号处理器作为主控芯片,在CCS集成开发平台上设计了以磁场定向为控制方法的三闭环伺服控制系统.首先介绍了系统的总体硬件设计和主要电路设计,对电路设计中关键问题进行分析.接着介绍了系统整体软件框架和各模块的具体软件设计,并设计了带有积分校正的PI控制器实现系统的三环控制,得到了较好的控制效果.【期刊名称】《机械设计与制造》【年(卷),期】2011(000)009【总页数】3页(P40-42)【关键词】永磁同步电机;磁场定向控制;DSP【作者】岑海洪;杨艳娟【作者单位】华南理工大学机械与汽车工程学院,广州510641;华南理工大学机械与汽车工程学院,广州510641【正文语种】中文【中图分类】TH16;TM921.54+11 引言现代交流伺服系统对控制的要求是响应快、精度高、转矩脉动小,而实现交流电机瞬时转矩的高性能控制,则成为满足这些要求的关键因素。
基于DSP的永磁同步电机伺服控制算法研究
基于DSP的永磁同步电机伺服控制算法研究摘要:随着社会经济的进步发展和科学技术的革新,生产行业伴随着技术的创新有了新的发展态势,特别是伺服控制系统已经广泛应用在各行各业内。
基于此,本文以DSP永磁同步电机伺服控制算法作为研究对象,通过对永磁同步电机伺服控制系统的相关概况进行分析,分别从基于DSP的永磁同步电机伺服控制系统的硬件电路设计和软件电路设计进行详细阐述,探究基于DSP的永磁同步电机伺服控制的有关算法,从而体现出整个控制系统的数字化和智能化。
关键词:DSP;永磁同步电机;伺服控制算法引言:工业化进程的脚步加快,导致数字信号处理技术和控制技术的发展带动了永磁同步电机的进步,越来越小的功率损耗获得各行各业的青睐,使用先进DSP永磁同步电机伺服控制算法,提高工业生产效率,加强对系统的有效控制,拓宽基于DSP的永磁同步电机伺服控制系统的应用领域,提高计算的精确度,加强航天航空、数控加工以及机器人控制领域的有效发展,推动我国高科技技术的研究实力。
1. 永磁同步电机伺服控制系统相关概况分析基于DSP的永磁同步电机伺服控制系统中,伺服系统指的就是执行机构会根据接收得到的信号进行制定的动作,如果没接收到信号就不会做出动作,当信号达到系统内部的时候,根据信号的要求进行工作。
随着工业的进步和发展,永磁同步电机出现在工业生产领域,并且开始逐渐占据主导地位,但是永磁同步电机的进步会受到材料的制约,在二十世纪七十年代,永磁同步电机生产已经得到应用,但是它用到的稀土永磁材料价格过于昂贵,并没有广泛被应用在各行各业当中;到了二十世纪九十年代,永磁同步电机中材料技术逐渐发展成熟,性能的完善带来了价格的降低,永磁同步电机功率和性能在第一程度上有了提高,电机的体积减小,结构制作以及电机的设计工艺有了发展,基于DSP的永磁同步电机伺服控制算法结果更加精准,带动了永磁同步电机的应用。
电力电子技术是实现永磁同步电机伺服控制的重要技术之一,在这其中半导体功率器件起到了尤为关键的作用,在各个发展阶段中,半导体功率器件都有着属于自己的作用,首先在半控式晶闸管的演进下,形成了具备自关断能力的半导体器件,在这其中包含大功率晶体管、可关断晶闸管以及功率场效应管,随着时代的进步和发展出现了复合型的厂控器件,在这其中包含了绝缘栅功率晶体管、静电感应式晶体管、静电感应式晶闸管和MOS晶体管,最终经过不断的有效资源配置和相关基于DSP的永磁同步电机伺服控制技术的革新,功率集成电路形成,带动了基于DSP的永磁同步电机伺服控制算法的进一步发展[1]。
基于DSP的永磁同步直线电机伺服控制系统的研究_3基于DSP的数字伺服控制系统方
3 基于DSP的数字伺服控制系统方案3.1 交流电机数字控制系统的特点数字控制系统是自动控制理论和计算机技术相结合的产物,一般是指微处理机参与控制的开环或闭环系统,通常具有精度高、速度快、存储量大和有逻辑判断功能等特点,因此可以实现高级复杂的控制方法,获得快速精密的控制效果。
相对于传统的模拟控制系统而言,数字控制系统有以下优点[9]:(1)精心设计的微机控制系统能显著地降低控制器硬件成本。
根据目前微机的发展趋势来看,此优点变得越来越明显,对于复杂控制系统尤其如此。
为用户专门设计的大规模集成电路(VLSI)加软件构成的控制芯片,或为大批量生产设计的专门集成电路(ASIC)均使系统硬件成本大大降低。
体积小、重量轻、耗能少是它们附带的共同优点。
(2)改善系统可靠性。
VLSI使系统连线减少到最少,其平均无故障时间(MTBF)大大长于分立元器件电路。
经验表明,正确设计微机控制系统的可靠性大大优于电机控制系统中的其它元器件。
(3)数字电路不存在温漂问题,不存在参数变化的影响。
(4)可以设计统一的硬件电路,以适合于不同的电机控制系统。
软件设计具有很大的灵活性,可以有不同的版本,还可加快产品的更新换代。
(5)可以完成复杂的功能,指令、反馈、校正、运算、判断、监控、报警、数据处理、故障诊断、状态估计、触发控制、PWM脉冲产生、坐标变换等等。
数字控制系统也有其不足之处,主要表现在:(1)存在采样和量化误差。
尽管计算机内部的数字量非常精确,但和外部打交道均通过数/模(D/A)、模/数(A / D)转换器。
D/A、A / D转换器的位数和计算机的字长是一定的,增加位数和字长及提高采样频率可以减少这一误差,但不可以无限制地增加。
(2)响应速度往往慢于专用的硬件或模拟系统。
计算机处理信号是以串行方式进行的,尽管微处理机的速度提高很快,但要完成很多任务仍需较长的时间。
此外,采样时间的延迟可能造成系统的不稳定。
(3)软件人工成本较贵。
基于DSP永磁同步电机伺服系统硬件设计

微控制器选择
微控制器的选择是伺服控制器硬件设计的关键步骤。它需要满足以下要求: 具有高速运算能力,能够处理复杂的控制算法;具有丰富的外设接口,能够与传 感器和驱动器进行通信;具有高可靠性和稳定性,能够在恶劣环境下正常工作。 常用的微控制器包括STM32、DSP和PowerPC等。
驱动器选择
驱动器是伺服控制器的重要部件,它需要驱动功率电子器件来控制电机的运 行。根据电机的类型和功率要求,选择合适的驱动器至关重要。对于PMSM,常用 的驱动器包括IPM(智能功率模块)和半桥驱动器等。选择驱动器时需要考虑其 功率、效率、保护功能以及与微控制器的接口兼容性等因素。
三、实验结果与性能分析
在完成硬件设计和驱动保护后,我们需要对整个系统进行实验测试,以验证 其性能和稳定性。实验结果通常包括电机的转速、电流、位置等数据的波形图, 以及系统的响应时间、稳态误差等性能指标。
通过实验结果,我们可以分析出基于DSP的永磁同步电机控制系统的控制精 度、动态响应、鲁棒性等性能。这些性能可以通过调整控制算法的参数、优化驱 动电路的设计、改进保护措施等方式进行优化。
结论:
本次演示介绍了基于DSP的永磁同步电机控制系统硬件设计的关键步骤和方 法,包括DSP的选择、硬件设计、永磁同步电机的驱动和保护以及实验结果和性 能分析。通过这些步骤和方法,我们可以实现一个高效、稳定、可靠的永磁同步 电机控制系统。
在实际应用中,我们还需要根据具体的需求和应用场景进行适当的调整和优 化,例如调整控制算法的参数以适应不同的电机特性、优化驱动电路的设计以提 高系统的效率、改进保护措施以提高系统的安全性等。我们还需要最新的技术发 展,以便将最新的技术和方法应用到实际的系统中,以提升系统的性能和竞争力。
2、CAN总线通讯接口:CAN总线通讯接口是一种常见的通讯接口之一,具有 高可靠性、高实时性等特点。在设计中,我们需要选择合适的CAN总线控制器来 进行通讯接口的设计,并确定通讯协议和通讯速率等参数。
基于DSP的交流永磁同步电动机运动控制系统研究
1 控 制 模 型 与 控 制 系统
1 1 控制 模型 .
三相 交 流永磁 同步 电动机 模 型是 一 个 多 变量 、 非 线性 、 强耦 合 系统 。为 了实 现转矩 线性 化控 制 , 就必 须
n ts n h o o tr s r o c n r ls se h s g o y mi e p n e p ro ma c n ttc p rom- e y c r n usmoo e v o to y tm a o d d na c r s o s e fr n e a d sai e fr ac n e,a d wi o a tsr c u e,r a o a l e in,c n r lfe il n t c mp c tu t r h e s n b e d sg o to lxb e,ec. t
Re e rh o s a c n DSP- a e b s d AC e m a e tma n ts n h o o s p r n n g e y c r n u mo o o in c n r l y t m t rm t o t se o o s
L e qn ,W AN Da i IW n ig G we ,DI NG u  ̄i I n ,L N Me g Y n ,JN Me g I n
Dia Reh enn eΒιβλιοθήκη 设计与研究 s d s『 g c
基 于 D P的 交 流 永 磁 同步 电动 机 运 动 控 制 系 统 研 究 S
李文庆 王大伟 丁云 飞 金 蒙 林 猛
( 大连 光洋 科技 工程 有 限公 司 , 大连 辽 宁 16 0 ) 16 0 摘 要 : 了提 高 交流 永磁 同步 电动 机运 动控 制 系统 的 控 制精 度 , 论 了基 于 DS 的永 磁 同步 伺 服 控 制 系 为 讨 P
基于DSP的永磁同步电机矢量控制系统的研究
基于DSP的永磁同步电机矢量控制系统的研究一、本文概述随着科技的快速发展和工业领域的日益进步,永磁同步电机(PMSM)因其高效率、高功率密度以及良好的调速性能,在工业自动化、电动汽车、航空航天等领域得到了广泛应用。
永磁同步电机的控制策略复杂,需要精准的控制算法以实现其性能优化。
在此背景下,基于数字信号处理器(DSP)的永磁同步电机矢量控制系统成为了研究的热点。
本文旨在探讨基于DSP的永磁同步电机矢量控制系统的设计与实现。
文章将介绍永磁同步电机的基本原理和控制策略,为后续研究提供理论基础。
将详细阐述基于DSP的矢量控制系统的硬件和软件设计,包括DSP的选择、外围电路设计、控制算法的实现等。
文章还将探讨矢量控制算法的优化,以提高永磁同步电机的运行效率和稳定性。
通过本文的研究,期望能够为永磁同步电机矢量控制系统的设计与实践提供有益的参考,推动永磁同步电机在实际应用中的性能提升,为工业领域的发展做出贡献。
二、永磁同步电机的基本理论永磁同步电机(PMSM)是一种利用永磁体产生磁场的同步电机。
与传统的电励磁同步电机相比,PMSM省去了励磁线圈和相应的励磁电源,因此结构更为简单,效率更高。
PMSM的理论基础主要涉及电机学、电磁场理论和控制理论。
在电机学方面,PMSM的运行原理基于电磁感应定律和电磁力定律。
电机通过定子电流与转子永磁体产生的磁场相互作用,实现电能与机械能的转换。
定子的三相电流在电机气隙中产生旋转磁场,该磁场与转子上的永磁体磁场相互作用,从而产生转矩,驱动电机旋转。
在电磁场理论方面,PMSM的设计和优化需要考虑电磁场分布、绕组设计、磁路设计等因素。
通过合理的电磁设计,可以提高电机的效率、降低损耗、提高转矩密度和动态性能。
控制理论在PMSM的运行中起着至关重要的作用。
矢量控制(也称为场向量控制)是一种先进的控制策略,它通过独立控制电机的磁通和转矩,实现了对PMSM的高性能控制。
矢量控制将定子电流分解为励磁分量和转矩分量,通过调节这两个分量的大小和相位,可以实现对电机转速、转矩和功率的精确控制。
基于DSP的永磁同步电机伺服控制系统设计与实现的开题报告
基于DSP的永磁同步电机伺服控制系统设计与实现
的开题报告
1.研究背景和意义
随着现代交通工具和工业机械的不断发展,永磁同步电机广泛应用
于这些领域。
永磁同步电机有高效、高功率因素、低噪音和低损耗等优点,因此在工业控制领域中有着广泛的应用前景。
由于其高性能和灵活性,永磁同步电机伺服系统正在逐渐取代传统的伺服系统。
因此,对永
磁同步电机伺服控制系统的研究日益受到关注。
2.研究内容和方法
本文将通过DSP来设计永磁同步电机伺服控制系统。
研究内容主要
包括以下几个方面:
(1)永磁同步电机的理论基础
(2)永磁同步电机伺服控制系统的基本原理和控制算法
(3)基于DSP的永磁同步电机伺服控制系统的硬件设计
(4)基于DSP的永磁同步电机伺服控制系统的软件设计
在硬件设计方面,使用DSP芯片作为核心,在该芯片的支持下,设
计系统的整体电路。
在软件设计方面,使用Matlab/Simulink软件建立永磁同步电机数学模型,分析其控制算法,并开发相应的控制程序。
最后,通过仿真和实验验证系统的性能。
3.研究意义和预期成果
本研究将在永磁同步电机伺服控制系统的设计和控制算法方面进行
深入探索,并将开发一套完整的控制系统。
通过仿真和实验,验证所设
计控制系统的有效性和可行性。
该研究对永磁同步电机的应用以及工业
控制的发展都具有重要意义。
预期成果包括:
(1)基于DSP的永磁同步电机伺服控制系统的硬件设计图(2)DSP控制程序的设计和实现
(3)永磁同步电机伺服控制系统的性能测试结果和分析(4)学术论文、会议论文等相关成果。
基于DSP的永磁同步电机伺服控制系统的研究的开题报告
基于DSP的永磁同步电机伺服控制系统的研究的开题报告1.选题背景及意义永磁同步电机被广泛应用于各种工业领域,其中尤以高性能伺服系统为重要应用之一。
因其响应快、效率高、结构简单等优势,永磁同步电机在伺服系统中具有广泛的应用前景。
现代化的钻机、航空航天、水利电力等工业领域需要高速、精准、高可靠的运动控制系统,这就需要研究出一种高性能伺服系统的控制算法。
DSP (Digital Signal Processing)因其高速、可编程性和易于实现等特点,在控制系统中得到了广泛应用。
在永磁同步电机伺服控制系统中,采用DSP控制器对电机进行控制,可以实现电机的高速响应、高精度控制和高可靠性运行。
本课题的研究目的是:基于DSP控制器,研究永磁同步电机伺服控制系统的控制算法及其实现方法,进一步提高永磁同步电机伺服系统的控制精度和稳定性,并实现对高精度运动控制的需求。
2.研究内容及目标本课题主要研究内容包括:(1)永磁同步电机的特性分析及数学模型建立;(2)永磁同步电机伺服控制系统的控制策略分析和设计;(3)基于DSP控制器的永磁同步电机伺服控制系统的硬件设计和软件实现;(4)永磁同步电机伺服控制系统的实验验证和性能测试。
研究目标:(1)建立永磁同步电机的数学模型,研究电机的特性和控制策略,实现伺服系统对电机的高速、高精度控制;(2)设计基于DSP控制器的永磁同步电机伺服控制系统,实现电机的高速响应、高精度控制、高可靠性运行;(3)验证系统设计的可行性与有效性,测试系统的控制精度和稳定性。
3.研究方法及步骤本课题的研究方法主要包括实验研究和理论分析两种方法,具体步骤如下:(1)理论分析通过对永磁同步电机的特性和数学模型进行理论研究,提出一种适用于高性能伺服系统的控制策略,并进行仿真验证。
(2)硬件设计根据理论研究结果,设计基于DSP控制器的永磁同步电机伺服控制系统硬件,包括电机驱动电路、电机控制器和信号采集模块等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Resear ch on the Per manent Magnet AC Ser vo-Contr ol System based on DSP
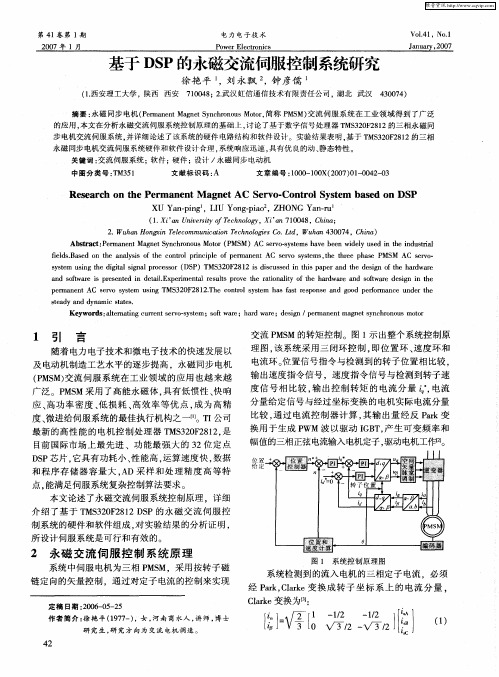
系统检测到的流入电机的三相定子电流,必须 经 Park, Clarke 变换成转子坐标系上的电流分量, Clarke 变换为[3]: isA 1 - 1/2 - 1/2 i! (1) = 2 isB i" 3 0 # 3 /2 - # 3 /2 i sC
! "# !
" !"
Байду номын сангаас
42
基于 DSP 的永磁交流伺服控制系统研究
第 41 卷第 1 期
电力电子技术
Vol.41 , No.1 January, 2007
2007 年 1 月
Power Electronics
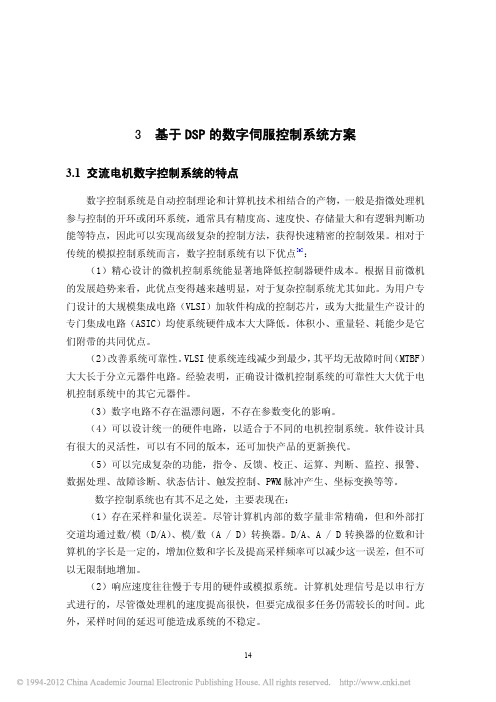
图 4b 为系统空载时 n 响应波形, 经过约 200ms 后 n 迅速由 0r/min 上升到 1000r/min,系统响应无超调; 图 4c 为带负载 1500r/min 时稳态 iA 波形,由图可 见, 系统稳态运行性能良好。
图 4 实验结果
图 4d 为系统运行于 25r/min 时,负载由 1N ・ m 变化为空载时的电流波形, 负载突减时, 电流幅值从 增益大小有很大关系。当电压瞬时值 ( 上 接 第 39 页 ) 环和电流瞬时值环增益较小时, R9 输入端的值就较 大, 系统超调量也越大。
2004. [5] 张卫宁 .Texas Instruments Incorporated. TMS320C28x 系 列 DSP 的 CPU 与外设 (下) 清华大学出版社, [M]. 北京: 2005.
要实现定子坐标系到转子坐标系的变换必须在 控制中实时检测电机转子的位置,系统中采用增量 式光电编码器作为转子位置检测传感器。
4
系统软件设计
3
系统硬件设计
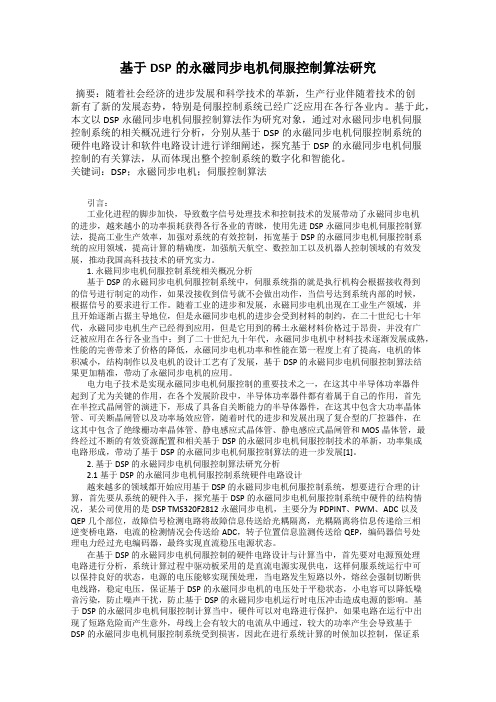
[4, 5]
图 2 示出整个伺服系统硬件框架,硬件电路可 分成三部分, 即主电路、 控制电路、 以及介于主电路 和控制电路之间的检测与驱动电路。控制电路主要 由 TMS320F2812 DSP 和外围电路组成, 包括上电复 位电路, 键盘显示电路, 两相电流采样电路, 温度检 测电路, 测速电路, 直流母线电压采样电路, 过电流 保护与过电压保护电路, 外部输入输出接口电路等。
摘 要 : 永磁同步电机 (Permanent Magnet Synchronous Motor, 简称 PMSM) 交流伺服系统在工业领域得到了广泛 的应用, 本文在分析永磁交流伺服系统控制原理的基础上, 讨论了基于数字信号处理器 TMS320F2812 的三相永磁同
步电机交流伺服系统, 并详细论述了该系统的硬件电路结构和软件设计。实验结果表明, 基于 TMS320F2812 的三相 永磁同步电机交流伺服系统硬件和软件设计合理, 系统响应迅速, 具有优良的动、 静态特性。
式中
—— isA, isB, isC—电机三相定子电流 —! , i!, i"—— " 坐标系上定子 电 流 分 量
Park 变 换 为 :
i cos# =! ! " i - sin#
d q
sin# cos#
i " (2) "! i
! "
式中 id , id —— —d, q 坐标系上定子电流分量 —— A 相定子绕组的夹角 # —转子位置与
第 41 卷第 1 期
电力电子技术
Vol.41 , No.1 January, 2007
2007 年 1 月
Power Electronics
基于 DSP 的永磁交流伺服控制系统研究
徐艳平 1, 刘永飘 2, 钟彦儒 1
(1.西安理工大学,陕西 西安 710048;2.武汉虹信通信技术有限责任公司,湖北 武汉 430074)
XU Yan-ping1,LIU Yong-piao2,ZHONG Yan-ru1
(1. Xi’ an University of Technology,Xi’ an 710048,China; 2. Wuhan Hongxin Telecommunication Technologies Co. Ltd,Wuhan 430074,China) Abstr act : Permanent Magnet Synchronous Motor(PMSM)AC servo-systems have been widely used in the industrial the three phase PMSM AC servo- fields.Based on the analysis of the control principle of permanent AC servo systems, system using the digital signal processor(DSP)TMS320F2812 is discussed in this paper and the design of the hardware and software is presented in detail.Experimental results prove the rationality of the hardware and software design in the permanent AC servo system using TMS320F2812.The control system has fast response and good performance under the steady and dynamic states. alternating current servo-system;soft ware;hard ware;design / permanent magnet synchronous motor Keywor ds:
交流 PMSM 的转矩控制。图 1 示出整个系统控制原 理图, 该系统采用三闭环控制, 即位置环、 速度环和 电流环。 位置信号指令与检测到的转子位置相比较, 输出速度指令信号,速度指令信号与检测到转子速 度信号相比较, 输出控制转矩的电流分量 iq*, 电流 分量给定信号与经过坐标变换的电机实际电流分量 比较, 通过电流控制器计算, 其输出量经反 Park 变 换用于生成 PWM 波以驱动 IGBT, 产生可变频率和 幅值的三相正弦电流输入电机定子, 驱动电机工作[2]。
护信号。过压保护信号分成两路, 一路接入 DSP 的 实现过压的软件保护, 另一路与电流保护信号 I/O 口, 接到功率保护中断引脚 (PDPINTA) , 控制 PWM 驱动。 有 系统采用的光电编码器为每周 2500 脉冲, 提供 6 路脉冲信号。脉冲经 QEP 20 针的标准接口, 电路 4 倍频, 用来计算转子位置和转速。
图 3 主程序流程图
在位置环、速度环运算中插入指令平滑化处理 程序,使产生的位置和速度在单位时间内的变化值 较小, 避免因输入指令急剧变化, 产生过大的加速度 微分, 引起机械结构的振动与噪音。 在进行指令平滑处 理后, 再引入微分前馈, 可使系统响应迅速, 降低系统 动态跟踪误差, 定位精度高。 在程序中多处采用数字 滤波器, 能有效防止干扰和抑制机械结构共振现象。
1
引
言
随着电力电子技术和微电子技术的快速发展以 及电动机制造工艺水平的逐步提高,永磁同步电机 交流伺服系统在工业领域的应用也越来越 (PMSM) 广泛。PMSM 采用了高能永磁体, 具有低惯性、 快响 应、 高功率密度、 低损耗、 高效率等优点, 成为高精 [1] 度、 微进给伺服系统的最佳执行机构之一 。TI 公司 最新的高性能的电机控制处理器 TMS320F2812, 是 目前国际市场上最先进、功能最强大的 32 位定点 它具有功耗小、 性能高, 运算速度快, 数据 DSP 芯片, 和程序存储器容量大, 采样和处理精度高等特 AD 点, 能满足伺服系统复杂控制算法要求。 本文论述了永磁交流伺服系统控制原理,详细 介绍了基于 TMS320F2812 DSP 的永磁交流伺服控 制系统的硬件和软件组成, 对实验结果的分析证明, 所设计伺服系统是可行和有效的。
TMS320F2812 的程序和数据空间资源非常丰 富, 指令周期只有 6.67ns, 能满足复杂的控制算法需 求, 在一片 DSP 内即可实现多种算法。软件算法采 用 C 语言编程, 模块化设计思想大大缩短了开发周 期, 增强了代码的可维护性和移植性。 伺服控制系统 软件部分的设计由主程序、 PWM 中断即定时器 T1 下溢中断、 过压保护中断 XINT2 等组 PDPINTA 保护、 成。在主程序中完成变量初始化、 键盘处理、 显示处 理、 故障检测及处理等。图 3 示出主程序流程图。
约 2A 明显减小到约 0.3A, n 经微小调整后又稳定 到给定值。由实验波形可见,所设计的基于 PMSM 的交流伺服系统响应迅速, 稳态运行时性能良好。
6
结
论
本文介绍了永磁交流伺服控制系统的控制原 理, 采用 TMS320F2812 DSP 设计了交流永磁同步电 机伺服系统的硬件电路和软件编程。 实验结果证明, 所设计的伺服系统硬件和软件可行,控制系统动静 态性能良好。
5
实验结果
根据上述硬件电路和软件编程, 对 PMSM 伺服 系统进行了实验验证, 实验参数为: 额定电压 200V, 额 定 电 流 9.4A, 额 定 转 矩 7.15N・ 额定转速 m, 极对数 4 对, 转子惯量 12.30 × ・ 2000r/min, 10 - 4kg m2。 在软件程序中设定 PWM 频率为 5kHz, 死区时间为 图 4 示出实验波形。 图 4a 为给定阶跃信号、 5.33!s, 带 3N ・ 可见, m 负载时的起动电流 iA 与转速 n 波形。 带 载 起 动 时 间 约 为 800ms, 系统带载起动平稳; 43