基于MATLAB的模块化机器人手臂运动学算法验证及运动仿真
基于MATLAB与ADAMS的机械臂联合仿真研究
基于MATLAB与ADAMS的机械臂联合仿真研究一、本文概述随着机器人技术的快速发展,机械臂作为机器人执行机构的重要组成部分,其运动性能和控制精度对于机器人整体性能具有决定性影响。
为了提升机械臂的设计水平和控制性能,研究者们不断探索新的仿真技术。
在此背景下,基于MATLAB与ADAMS的机械臂联合仿真研究应运而生,为机械臂的设计优化和控制策略的开发提供了有力支持。
本文旨在探讨基于MATLAB与ADAMS的机械臂联合仿真的方法与技术,并对其进行深入的研究。
介绍了MATLAB和ADAMS软件的特点及其在机械臂仿真中的应用优势。
阐述了机械臂联合仿真的基本原理和步骤,包括模型的建立、动力学方程的求解、控制算法的设计等。
接着,通过实例分析,展示了联合仿真在机械臂运动学性能分析和控制策略验证方面的实际应用。
总结了联合仿真的研究成果,并展望了未来的发展方向。
本文的研究不仅有助于提升机械臂的设计水平和控制性能,也为相关领域的研究者提供了有益的参考和借鉴。
通过不断深入研究和完善联合仿真技术,将为机器人技术的发展注入新的活力。
二、MATLAB与ADAMS联合仿真的理论基础在进行MATLAB与ADAMS的机械臂联合仿真研究时,理解两种软件的理论基础和它们之间的交互方式是至关重要的。
MATLAB作为一种强大的数值计算环境和编程语言,广泛应用于算法开发、数据可视化、数据分析以及数值计算等多个领域。
而ADAMS(Automated Dynamic Analysis of Mechanical Systems)则是一款专门用于多体动力学仿真的软件,特别适用于复杂机械系统的运动学和动力学分析。
MATLAB与ADAMS的联合仿真理论基础主要包括以下几个方面:接口技术:MATLAB与ADAMS之间的数据交换和通信是联合仿真的核心。
通常,这需要通过特定的接口技术来实现,如ADAMS提供的Control接口或MATLAB的Simulink接口。
基于MATLAB的机器人运动学建模及仿真分析
因此 , 求解 机器 人 的运动 学 问题 转 化成 了求解 夹爪 相对 于基座 的关 系 ̄ 6 T eR , 进而细 化成 求解连 杆i 一 1 与连 杆i 之 间 的相 对关系 , 即 T , 记作 :
cO ,
s o# O L l c e #o L H
一
c 1
基金项 目: 中山 市 科 技 计 划 项 目 ( 2 0 1 4 A 2 F C 3 4 3 ) , 电子 科 技
i - 1 j
s
l c
O l I
d, c a l 1
大学 科 研 平 台建 设项 目( 4 1 4 Y P 0 3 ) , 电子科 技 大 学 中 山 学 院校 内
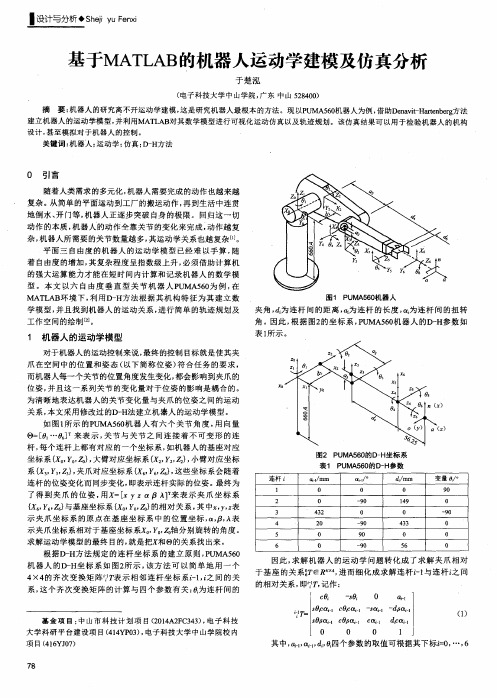
求 解 运 动 学 模 型 的 最 终 目的 , 就 是 把 和 @的 关 系 找 出来 。
根据D— H方 法规 定 的连 杆坐 标系 的建立 原则 , P U MA5 6 0
机器 人 的D — H坐 标系 如 图2 所示, 该方 法可 以简单 地 用 一个 4×4 的齐次变 换矩 阵 表 示相 邻连 杆坐 标系 i - 1 , i 2 _ 间的 关 系, 这个 齐次变换 矩阵 的计算 与四个 参数有 关 : 为连杆 间 的
0 一 9 0 0 — 9 0 9 0 — 9 0
d J m m
0 1 4 9 0 4 3 3 O 5 6
变量 o , / 。
9 0 0 - 9 0 O O O
了得 到 夹 爪 的位 姿 , 用 = y O / p A 】 来 表示 夹 爪 坐 标 系
0 引言
随着人类需求的多元化 , 机器人 需要完成 的动作也越来越 复杂 。 从简单 的平面运动到工厂 的搬运 动作 , 再 到生活 中连贯 地倒水 、 开 门等, 机 器人正逐步 突破 自身 的极限 。回归这一切 动作 的本 质 , 机 器人 的动作 全靠关节 的变化来完 成, 动作越复
基于MATLAB的六自由度工业机器人运动分析和仿真
基于MATLAB的六⾃由度⼯业机器⼈运动分析和仿真基于MATLAB 的六⾃由度⼯业机器⼈运动分析及仿真摘要:以FANUC ARC mate100⼯业机器⼈为研究对象,对其机构和连杆参数进⾏分析,采⽤D-H 法对机器⼈进⾏正运动学和逆运动学分析,建⽴运动学⽅程。
在MATLAB 环境下,运⽤机器⼈⼯具箱进⾏建模仿真,仿真结果证明了所建⽴的运动学正、逆解模型的合理性和正确性。
关键词:FANUC ARC mate100⼯业机器⼈; 运动学; MATLAB 建模仿真 1引⾔⼯业机器⼈技术是在控制⼯程、⼈⼯智能、计算机科学和机构学等多种学科的基础上发展起来的⼀种综合性技术。
经过多年的发展,该项技术已经取得了实质性的进步[1]。
⼯业机器⼈的发展⽔平随着科技的进步和⼯业⾃动化的需求有了很⼤的提⾼,同时⼯业机器⼈技术也得到了进⼀步的完善。
⼯业机器⼈的运动学分析主要是通过⼯业机器⼈各个连杆和机构参数,以确定末端执⾏器的位姿。
⼯业机器⼈的运动学分析包括正运动学分析和逆运动学分析。
随着对焊接件要求的提⾼,弧焊等机器⼈的需求越来越多。
本⽂就以FANUC ARC mate100机器⼈为研究对象,通过分析机构和连杆参数,运⽤D-H 参数法建⽴坐标系,求出连杆之间的位姿矩阵,建⽴⼯业机器⼈运动学⽅程。
并在MATLAB 环境下,利⽤RoboticsToolbox 进⾏建模仿真。
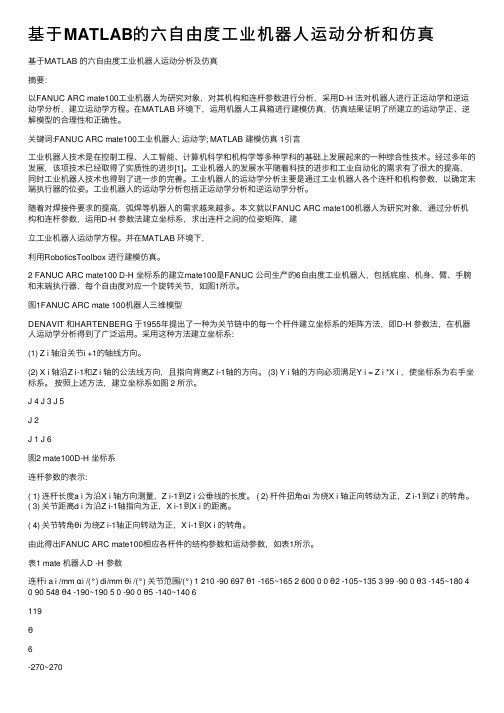
2 FANUC ARC mate100 D-H 坐标系的建⽴mate100是FANUC 公司⽣产的6⾃由度⼯业机器⼈,包括底座、机⾝、臂、⼿腕和末端执⾏器,每个⾃由度对应⼀个旋转关节,如图1所⽰。
图1FANUC ARC mate 100机器⼈三维模型DENAVIT 和HARTENBERG 于1955年提出了⼀种为关节链中的每⼀个杆件建⽴坐标系的矩阵⽅法,即D-H 参数法,在机器⼈运动学分析得到了⼴泛运⽤。
采⽤这种⽅法建⽴坐标系:(1) Z i 轴沿关节i +1的轴线⽅向。
基于MATLAB五自由度机械手运动学仿真分析

基于MATLAB五自由度机械手运动学仿真分析五自由度机械手是一种具有五个独立自由度的机械装置,可以实现复杂的姿态和路径规划。
为了研究其运动学特性,可以使用MATLAB进行仿真分析。
本文将基于MATLAB对五自由度机械手的运动学进行仿真分析,包括直接运动学和逆运动学。
首先,我们需要定义机械手的结构和参数。
五自由度机械手通常由五个关节连接而成,每个关节的旋转角度可以通过电机控制。
我们可以使用DH参数建立机械手的运动学模型,在MATLAB中定义每个关节的DH参数。
DH参数包括关节的长度、偏移、旋转角度和连接方式等。
在定义了机械手的结构和参数之后,我们可以进行直接运动学分析。
直接运动学是指根据机械手的关节角度计算末端执行器的位置和姿态。
在MATLAB中,可以使用正运动学算法根据给定的关节角度计算末端执行器的位置和姿态。
这个过程可以通过建立运动学模型和坐标变换矩阵实现,在MATLAB中可以使用符号计算工具箱对模型进行符号计算,得到末端执行器的位置和姿态的闭式解。
接下来,我们可以进行逆运动学分析。
逆运动学是指根据机械手的末端执行器位置和姿态计算关节角度。
在MATLAB中,可以使用逆运动学算法根据给定的末端执行器的位置和姿态计算关节角度。
这个过程通常需要使用数值方法进行迭代求解,MATLAB提供了多种数值求解方法,如牛顿法和Levenberg-Marquardt算法等。
我们可以使用这些算法对逆运动学进行求解,得到关节角度的解。
在进行仿真分析之前,我们还需要定义机械手的工作空间。
工作空间是机械手可以达到的位置和姿态的集合。
对于五自由度机械手,可以使用三维空间中的一个区域表示其工作空间。
在MATLAB中,可以定义一个三维空间的体积,在此体积内的点被认为是机械手的工作空间。
在MATLAB中进行仿真分析时,可以使用图形界面工具进行交互式仿真分析。
MATLAB提供了多种可视化和动画功能,可以实时显示机械手的运动过程和工作空间。
基于MATLAB的机器人柔性手臂控制系统设计与仿真【毕业作品】

任务书设计题目:基于MATLAB的机器人柔性手臂控制系统设计与仿真1.设计的主要任务及目标学生应通过本次毕业设计,综合运用所学过的基础理论知识,在深入了解反馈控制系统工作原理的基础上,掌握机械系统建模、分析及校正环节设计的基本过程;初步掌握运用MATLAB/Simulink相关模块进行控制系统设计与仿真的方法,为学生在毕业后从事机械控制系统设计工作打好基础。
2.设计的基本要求和内容(1)根据已有的机器人柔性手臂系统相关资料,对其结构特点及工作原理进行分析;(2)建立柔性手臂系统的数学模型;(3)应用极点配置对系统进行状态反馈设计;(4)运用MATLAB/SIMULINK对系统进行仿真计算;(5)通过动态仿真设计优化系统参数,对反馈系数K进行确定;3.主要参考文献[1] 刘白燕等编,机电系统动态仿真-基于MATLAB/SIMULINK[M].北京:机械工业出版社,2005.7[2] 王积伟,吴振顺等著,控制工程基础[M].北京:高等教育出版社2001.8[3] (日)末松良一. 机械控制入门[M].北京:科学出版社,2000[4] 徐昕等著. MATLAB工具箱应用指南.北京:电子工业出版社,2000 4.进度安排基于MATLAB的机器人柔性手臂控制系统设计与仿真摘要:机械臂未来的发展趋势是高速、高精度和轻型化、操作灵活的柔性机械臂。
柔性机械臂系统的动力学特点是大范围刚体运动的同时,伴随着柔性臂杆的小幅弹性运动。
柔性臂杆的弹性振动将极大地影响机械臂末端的定位精度。
本设计结合机器人柔性手臂的结构特点,对机器人柔性手臂进行了受力分析,建立了柔性手臂系统的集中参数模型。
对柔性手臂系统的特性、系统的可控制性和可观测性进行了分析,用极点配置求取状态反馈系数K对系统进行反馈。
使柔性手臂系统的振动快速达到稳态,用MATLAB仿真确认控制效果。
关键词:柔性机械臂,控制系统,MATLAB仿真Design and simulation system for flexible manipulator control basedon MATLABAbstract:The trend of the development of mechanical arm is high speed, high precision and light-duty, flexible operation of the flexible manipulator. The dynamics of flexible manipulator system is characterized by a wide range of rigid motion at the same time, with flexible arm slightly elastic movement. The elastic vibration of flexible arm will greatly influence the mechanical arm at the ends of the positioning accuracy. This design with the structure characteristics of a flexible robot arm, has carried on the stress analysis of flexible robot arms, established the lumped parameter model of the flexible arm system. Characteristics of the flexible arm system, system controllability and observability are analyzed, using pole assignment for state feedback coefficient K to feedback system. To make the vibration of the flexible arm system to reach steady state quickly, MATLAB simulation confirm the control effect.Key words:Flexible manipulator, Control system, MATLAB simulation目录1概述 (1)1.1引言 (1)1.2研究目的及意义 (2)1.3国内外柔性机械臂的研究现状 (3)1.3.1柔性臂动力学建模的研究现状 (3)1.3.2柔性机械臂的主动控制 (4)2柔性手臂的建模过程 (5)2.1柔性手臂对机器人的重要性 (5)2.2柔性手臂的试验模型 (6)2.3状态方程的建立 (8)2.3.1集中参数模型 (8)2.3.2系统参数和变量的定义 (8)2.3.3数学模型 (10)3系统的特性分析 (13)3.1实验参数 (13)3.2比例变换 (14)3.3系统矩阵的特征值和手臂的振型 (15)3.4可控制性和可观测性 (20)4用极点配置法进行设计和仿真 (22)4.1状态反馈设计 (22)4.2控制系统设计方法选择 (22)4.3利用仿真确认控制效果 (24)5控制系统的实现 (26)总结 (27)参考文献 (29)致谢 (30)附录 (31)1 概述1.1 引言随着人类科技水平的不断进步,机器人的应用越来越广泛。
基于MATLAB机器人手臂运动仿真
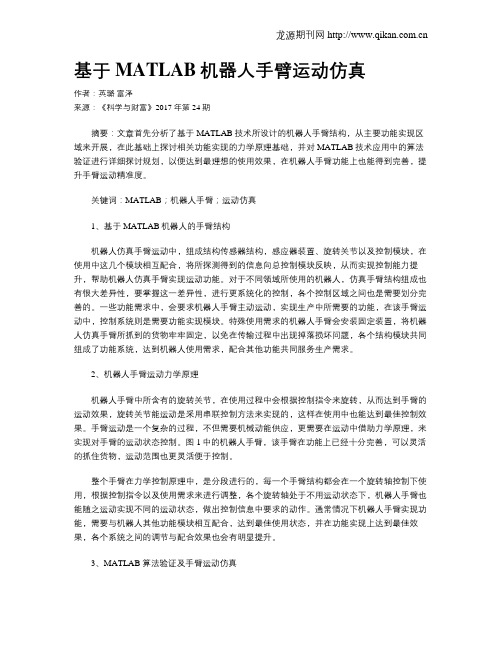
基于MATLAB机器人手臂运动仿真作者:英璐富泽来源:《科学与财富》2017年第24期摘要:文章首先分析了基于MATLAB技术所设计的机器人手臂结构,从主要功能实现区域来开展,在此基础上探讨相关功能实现的力学原理基础,并对MATLAB技术应用中的算法验证进行详细探讨规划,以便达到最理想的使用效果,在机器人手臂功能上也能得到完善,提升手臂运动精准度。
关键词:MATLAB;机器人手臂;运动仿真1、基于MATLAB机器人的手臂结构机器人仿真手臂运动中,组成结构传感器结构,感应器装置、旋转关节以及控制模块,在使用中这几个模块相互配合,将所探测得到的信息向总控制模块反映,从而实现控制能力提升,帮助机器人仿真手臂实现运动功能。
对于不同领域所使用的机器人,仿真手臂结构组成也有很大差异性,要掌握这一差异性,进行更系统化的控制,各个控制区域之间也是需要划分完善的。
一些功能需求中,会要求机器人手臂主动运动,实现生产中所需要的功能,在该手臂运动中,控制系统则是需要功能实现模块。
特殊使用需求的机器人手臂会安装固定装置,将机器人仿真手臂所抓到的货物牢牢固定,以免在传输过程中出现掉落损坏问题,各个结构模块共同组成了功能系统,达到机器人使用需求,配合其他功能共同服务生产需求。
2、机器人手臂运动力学原理机器人手臂中所含有的旋转关节,在使用过程中会根据控制指令来旋转,从而达到手臂的运动效果,旋转关节能运动是采用串联控制方法来实现的,这样在使用中也能达到最佳控制效果。
手臂运动是一个复杂的过程,不但需要机械动能供应,更需要在运动中借助力学原理,来实现对手臂的运动状态控制。
图1中的机器人手臂,该手臂在功能上已经十分完善,可以灵活的抓住货物,运动范围也更灵活便于控制。
整个手臂在力学控制原理中,是分段进行的,每一个手臂结构都会在一个旋转轴控制下使用,根据控制指令以及使用需求来进行调整,各个旋转轴处于不用运动状态下,机器人手臂也能随之运动实现不同的运动状态,做出控制信息中要求的动作。
基于MATLAB—Robotics的工业机器人运动学仿真研究
基于MATLAB—Robotics的工业机器人运动学仿真研究工业机器人是现代化工业生产中不可缺少的元素。
机器人模型的手动控制与轨迹规划仿真可以让机器人运动的研究过程呈现出直观化的特点。
本文主要对基于MATLAB-Robotics的工业机器人运动学仿真问题进行了探究。
标签:工业机器人;运动学轨迹;仿真分析0 前言工业机器人是机电一体化技术发展进步的产物。
现阶段工业机器人实物研发工作具有着成本高、周期长的特点。
工业机器人运动学仿真技术是利用系统模型对实际或设想的工业机器人系统进行试验研究的技术,根据工业机器人制备工艺的发展现状,仿真研究已经贯穿于工业机器人产品的各个研制环节之中MATLAB语言是机电工业领域较为常用的一种编程语言,这一编程语言具有着较为强大的矩阵计算能力,它可以应用于工业机器人的方案论证、设计分析和生产制造等各个阶段。
它也可以在工业研究、产品开发及数值分析等多个领域得到应用。
D-H坐标系法是建立机器人连杆模型的有效方法。
1 D-H坐标系的建立工业机器人是现代化工业生产中不可缺少的元素。
机器人模型的手动控制与轨迹规划仿真可以让机器人运动的研究过程呈现出直观化的特点。
基于MATLAB-Robotics机器人工具箱建立的工业机器人三维模型的应用,可以让人们借助编程形式对机器人模型进行检验。
坐标系在机器人模型的检验过程中发挥着较为重要的作用。
根据机器人的运动学原理与齐次变换的相关知识,在空间中的任意坐标系相对于某个参考坐标系但是位置和姿态的获取方式为两个坐标系之间的变换。
在坐标系建构完成以后,研究者需要在求取工业机器人运动学方程结果的基础上,对求解结果与滑块控制图的设定数值进行比较,为保证运动学方程求解结果的精确性,研究者可以将D-H坐标系应用于工业机器人运动学仿真分析过程之中。
根据工业机器人的实际情况,工业机器人运动学仿真研究工作的开展,要求研究者关注工业机器人的每一个连杆,在为不同连杆构建不同的坐标系以后,齐次变换会成为描述坐标系间的相对位置与姿态的工具。
基于MATLAB仿真的机器人运动学建模及控制技术研究

基于MATLAB仿真的机器人运动学建模及控制技术研究机器人的普及与应用越来越广泛,成为了工业自动化的重要组成部分。
但是,如何对机器人进行运动学建模与控制是机器人研究的重要问题之一。
近年来,由于计算机技术的发展,基于MATLAB仿真的机器人运动学建模及控制技术研究得到了广泛应用。
本文将对此方面的研究进行探讨。
一、机器人运动学建模机器人的运动学建模是指利用几何学和代数学知识来描述机器人的运动规律,从而实现机器人的运动控制。
根据机器人的类型,可以采用不同的方法进行运动学建模。
1、串联机器人的运动学建模串联机器人指的是由各种关节通过齿轮、链条等联接的机器人。
其运动学建模主要是研究各关节的角度、速度、加速度等变量与末端执行器之间的关系,从而实现机器人的控制。
这种建模的方法主要基于牛顿-欧拉方法,可以通过MATLAB中的符号化计算实现。
首先,需要对各个关节进行标号,并定义每个关节和基座之间的距离和角度。
然后,可以运用牛顿-欧拉方法来用关节运动学参数表示末端执行器的位置和姿态变量。
最后,通过控制关节运动学参数来控制机器人的运动。
2、并联机器人的运动学建模并联机器人由多个平台和机械臂组成,并联机器人可以同时控制多个执行器,从而实现更高效的工作。
并联机器人的运动学建模主要是研究机器人末端执行器的位置和姿态变量与各个执行器之间的关系。
建模方法主要包括支点变换法和雅可比矩阵法。
其中支点变换法是将并联机器人转化为串联机器人的形式,然后用串联机器人的运动学进行建模。
而雅可比矩阵法则是运用雅可比矩阵来建立机器人末端执行器的运动学模型,从而实现机器人的控制。
二、机器人运动控制机器人运动控制是指根据机器人的运动学模型,利用控制算法控制机器人的运动状态和轨迹。
在控制机器人的运动过程中,主要的控制方法包括开环控制、PID 控制和反馈控制等。
1、开环控制开环控制是一种简单的控制方法,即在机器人刚开始运动时就预设好机器人的运动轨迹和速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 1 . 安徽 理 工大学 机械 工程 学 院, 安徽 淮 南 2 3 2 0 0 1 ; 2 . 上 海 大学 C I M S&机 器人 中心 , 上海 2 0 0 4 4 4 )
摘 要 :针对 由模块化 关节 构成的 六 自由度 串联机 器人 手臂 , 采用 D H 法 对手臂 的操 作 空 间进行 了描 述 , 得 到
S h a n g h a i U n i v e r s i t y , S h a n g h a i 2 0 0 4 4 4 ,C h i n a )
Ab s t r a c t :A i mi n g a t t h e 6 DOF mo d u l a r s e r i a l r o b o t a r m, i f r s t l y ,t h i s p a p e r e s t a b l i s h e d t h e f o r wa r d k i n e ma t i c s mo d e l o f t h e r o b o t a r m a f t e r u s i n g D H me t h o d t o d e s c r i b e t h e wo r k s p a c e ,i t o b t a i n e d a g r o u p o f c o mp l e t e l y g e n e r a l i z e d c o o r d i n a t e s b y e m— p l o y i n g E u l e r a n g l e t o r e p r e s e n t t h e p o s i t i o n a n d o r i e n t a t i o n,a n d a n a l y z e d t h e g e o me t r i c r e l a t i o n s h i p o f t h e E u l e r a n g l e .
学算 法验 证程 序 以及 连杆驱 动程序 , 实现 了手臂 的仿 真运 动。通 过仿 真 , 不仅更 进 一 步验证 了手臂 正逆 运 动 学 解算 的正确性 , 而且 非常 直观地 看 出手臂 末端在 空 间 中运行 的路 径 以及 各 关节的动作 情 况。机 器人 手臂 正逆 运
动 学算法正确 性的验 证及运 动仿真 为手臂 的精确 定位及 其路径规 划提供 了必要 的保证 。 关键词 :模块 化 ; 机 器人 手臂 ;正逆 运动 学 ; 算 法验证 ; 运 动仿真 中图分类 号 :T P 2 4 1 文 献标志码 :A 文章编号 :1 0 0 1 — 3 6 9 5 ( 2 0 1 3 ) 0 6 — 1 6 8 2 — 0 3
S e c o n d l y,f o r t h e p o o r c o mp ut i ng c a pa bi l i t y o f S o l i d Wo r ks wi t h s t r o n g 3D mo d e l b u i l d i n g a b i l i t y c o mp a r e d wi t h M ATLAB, i t i mpo r t e d t he r o bo t a r m 3 D mo de l t o M ATL AB f r o m S o l i d Wo r ks a f t e r p r o g r a m mi n g t h e i n t e fa c e pr oc e d ur es . At l a s t .no t o n l y
d o i : 1 0. 3 9 6 9 / i . i s s n . 1 0 01 — 3 6 9 5 . 2 01 3. 0 6 . 0 2 0
Ki n e ma t i c s a l g o r i t h m v a l i d a t i o n a n d mo t i o n s i mu l a t i o n o f mo d u l a r r o b o t a r m b a s e d o n MATL AB
第3 0卷 第 6期 2 0 1 3年 6月
计 算 机 应 用 研 究
Ap p l i c a t i o n R e s e a r c h o f C o mp u t e r s
Vo 1 . 3 0 No . 6
的模 块 化 机 器 人 手臂 运 动 学 算法 验 证及 运 动 仿 真 术
L I Xi a n — h u a ,GUO Yo n g — c u n ,Z HANG J u n ,GUO S h u a i
( 1 S c h o o l o fMe c h a n i c a l E n g i n e e r i n g , A n h u i U n i v e r s i t y o fS c i e n c e& T e c h n o l o g y ,H u a i n a n A n h u i 2 3 2 0 0 1 , C h i n a ;2 .C I MS& R o b o t C e n t e r
了正运 动 学模 型 ; 采 用 欧拉 角表 示手臂姿 态, 得到 了包含 六个参数 的 用于表 示手臂 位姿 的完备 广义 坐标 , 并对欧
拉 角 的几何 关 系进 行 了分析 。针 对 S o l i d Wo r k s虽然 实体 建模 简洁方便但 计算 并非其 强项 的缺 点 , 编写相 应接 口 程序 , 将 建立的手臂 三 维 实体模 型保 留几何约 束 关 系简化 后 导入 MA T L A B软 件 。基 于 MA T L AB编 写 正逆 运动