机械原理大作业
机械原理大作业1
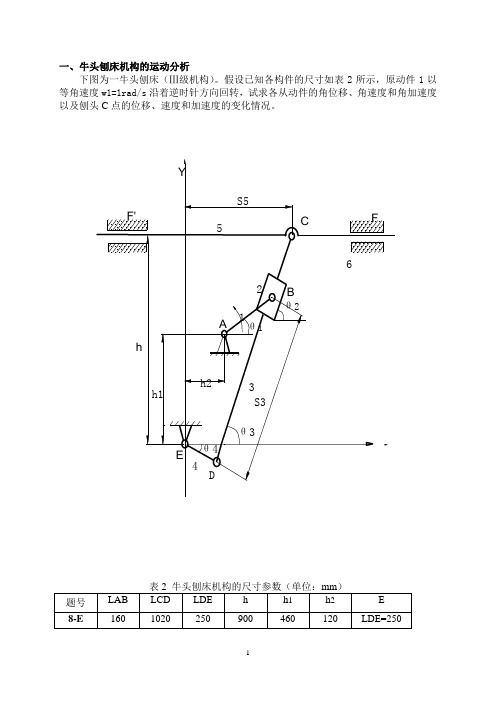
一、牛头刨床机构的运动分析下图为一牛头刨床(Ⅲ级机构)。
假设已知各构件的尺寸如表2所示,原动件1以等角速度w1=1rad/s沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及刨头C点的位移、速度和加速度的变化情况。
二、牛头刨床机构的运动分析方程 1)位置分析建立封闭矢量多边形建立一直角坐标系,并标出各杆矢量及其方位角,其中共有4个未知量3θ(θ2=3θ)、4θ、3S 、5S 。
利用两个封闭图形ABDEFA 和EDCGE ,建立两个封闭矢量方程,由此可得:3125DE AB DE CD l s h h l l l h s →→→→→→→→→⎧+=++⎪⎨⎪+=+⎩(1)把(1)写成投影方程得:433214331143543cos *cos *cos *sin *sin *sin *cos *cos 0*sin *sin DE AB DE AB DE CD DE CD l s h l l s h l l l s l l h θθθθθθθθθθ*+=+⎫⎪+=+⎪⎬+-=⎪⎪+=⎭(2) 由以上各式用型转化法可求得4335s s θθ、、、,滑块2的方位角23θθ=2111*cos *sin b AB b AB x h l y h l θθ=+⎧⎨=+⎩ 44*cos *sin d DE d DE x l y l θθ=⎧⎨=⎩3s =3)*sin *()/*cos *(/c d CD d CD b d c d CD d CD b d s x x l x l x x s y y l y l y y s αα=+=+-⎧⎪⎨=+=+-⎪⎩ 3tan c dc dy y x x θ-=- 5c s x =()ae AE =44()tan *cos d c DE y h y l θθ+-=高斯消去法求解 2)速度分析对(2)求一次导数得:44333331144333331144334433*sin *s '*cos *sin **sin **cos *'*sin *cos **cos **sin **sin *0*cos **cos *0DE AB DE AB DE CD c DE CD l s l l s s l l l v l l θωθθωθωθωθθωθωθωθωθωθω-+-=-⎫⎪++=⎪⎬---=⎪⎪+=⎭(3)矩阵式:3334313334313443cos *sin *sin 0'*sin sin *cos *cos 0*cos 0*sin *sin 100*cos *cos 00DE AB DE AB CD DE CD DE c s l s l s l l l l l l v θθθθθθθθθθωθθ---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥ω⎢⎥⎢⎥⎢⎥=ω1⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ (4)采用高斯消去法可求解(4)可解得角速度ω2,ω3; 3)加速度分析把(4)对时间求导数得:333433334334434cos *sin *sin 0''sin *cos *cos 00*sin *sin 10*cos *cos 0DE DE CD DE CD DE c s l s s l l l l l a θθθθθθθθαθθ--⎡⎤⎡⎤⎢⎥⎢⎥α⎢⎥⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎣⎦⎣⎦33333444433333343443334443344*sin '*sin **cos **cos 0'*cos '*cos **sin **sin 00**cos **cos 00**sin **sin 0DE DE CD DE CD DE c s s l s s s l l l l l v ωθθωθωθωθθωθωθωθωθωωθωθ----⎡⎤⎡⎤⎢⎥⎢⎥--ω⎢⎥⎢⎥=-⎢⎥⎢⎥--⎢⎥⎢⎥--⎣⎦⎣⎦1111**cos **sin 00AB AB l l ωθωθ-⎡⎤⎢⎥-⎢⎥+ω1⎢⎥⎢⎥⎣⎦(5)采用高斯消去法可求解(5)可解得角加速度α2,α3,α5,α6三、程序流程图四、计算源程序#include<stdio.h>#include<stdlib.h>#include<math.h>/* 定义变量*/const double PI = 3.14159265358979;const int N = 4;const double EPSILON = 0.0001;const int T = 1000;/* 代入已知量*/double Lab=160,Lcd=1020,Lde=250,h=900,h1=460,h2=120,Omega1=1;/* 声明子函数*/void AngleDisplacement(double[12],double);/* 角位移函数*/void AngleVelocity(double[N][N],double[N],double[12],double);/* 角速度函数*/void AngleAcceleration(double[N][N],double[N][N],double[N],double [12]);/* 角加速度函数*/void GaussE(double [N][N],double [N],double [N]);/* 高斯消去法函数*/void ModulusMatrixA(double [12],double [N][N]);/* 矩阵A函数*/void ModulusMatrixB(double [12],double ,double [N]);/* 矩阵B函数*/void MatrixDA(double [12],double [N][N]);/* 矩阵DA函数*/void MatrixDB(double [12],double ,double [N]);/* 矩阵DB函数*//* 主函数*/void main(){int i,j;FILE *fp;double data[36][12];double value[12],a[N][N],da[N][N],b[N],db[N],Phi1;char flag;/* 打开文件*/if((fp = fopen("Data","w")) == NULL){printf("文件打开错误!\n");exit(0);}fprintf(fp,"Lab =%lf \n",Lab);fprintf(fp,"s3\tPhi3\tPhi4\ts5\t");fprintf(fp,"s3'\tOmega3\tOmega4\ts5'\t");fprintf(fp,"s3''\tEpsilon3\tEpsilon4\ts5''");printf("\n\n 牛头刨床机构运动分析程序\n\n\n");printf("\n");printf(" 是否开始计算(Y/N):");scanf("%c",&flag);if(flag =='Y'){/*计算并写入文件*/value[0] = 480;value[1] = 65 * PI / 180;value[2] = 10 * PI / 180;value[3] = 500;for(i = 0;i < 36; i++){Phi1 = i * PI / 18;AngleDisplacement(value,Phi1);ModulusMatrixB(value,Phi1,b);ModulusMatrixA(value,a);AngleVelocity(a,b,value,Phi1);MatrixDA(value,da);MatrixDB(value,Phi1,db);AngleAcceleration(a,da,db,value);for(j = 1;j < 3; j++)value[j] = value[j] * 180 / PI;for(j = 0;j < 12; j++)data[i][j] = value[j];fprintf(fp,"\n");for(j = 0;j < 12; j++)fprintf(fp,"%12.3f\t",data[i][j]);}fclose(fp);/* 输出数据*/printf("\n\n\n计算结果如下:\n");for(i = 0;i < 36; i++){Phi1=i * PI / 18;printf("\n输出Phi1=%d时的求解\n",i*10);printf(" S3 Phi3 Phi5 S5\n");for(j = 0;j < 4; j++)printf("%lf\t",data[i][j]);printf("\n");printf(" S3' Omega3 Omega5S5'\n");for(j = 4;j < 8; j++)printf("%lf\t",data[i][j]);printf("\n");printf(" S3'' Epsilon3 Epsilon5 S5''\n");for(j = 8;j < 12; j++)printf("%lf\t",data[i][j]);printf("\n");}printf("\n程序运行结束,计算结果已写入Date文件中,请打开查看。
机械原理大作业
function [ v_Nx,v_Ny ] =v_crank(s,v_Ax,v_Ay,omiga,theta,phi) v_Nx=v_Ax-s*omiga.*sin(theta+phi); v_Ny=v_Ay+s*omiga.*cos(theta+phi); end
3>加速度计算
function [ a_Nx,a_Ny ]=a_crank(s,a_Ax,a_Ay,alph,omiga,theta,phi) a_Nx=a_Ax-alph.*s.*sin(theta+phi)-omiga.^2.*s.*cos(theta+phi);
。
1) 位置分析
将已知 P1P2 两点的坐标差表示为:
u=x2-x1,v=y2-y1
(1)
杆 l1 及 l2 投影方程式为:
l1cosθ1-l2cosθ2=u
l1sinθ1-l2sinθ2=v
(2)
消去θ1 得:vsinθ2+ucosθ2+c=0
(3)
其中: 解式(3)可得:
t(4) 式中+号和-号分别对应图 2 中 m=+1 和 m=-1 两位置。
由式(2)可得:
(5) 2) 速度分析
对 式 (2) 求 导 一 次 得 :
(6)
其中:
解式(6)可得:
(7)
其中: 3) 加速度分析
对式(6)求导一次得:
(8)
其中:
'.
解式(8)可得:
由上述式子可设计出 RRR 杆组运动分析子程序:
1>位置分析:
function[cx,cy,phi2,phi3]=s_RRR(bx,by,dx,dy,l2,l3,m,phi) d=sqrt((dx-bx).^2+(dy-by).^2); if(d>(l2+l3))|(d<abs(l2-l3))
机械原理大作业范文
机械原理大作业范文摘要:机械传动是机械学中的基础内容之一,广泛应用于各个行业和领域。
本文将对机械传动的原理、类型以及应用进行系统的介绍和探讨。
首先介绍了机械传动的定义和作用,然后详细介绍了各种常见的机械传动类型,包括齿轮传动、皮带传动、链传动等,并分别对其工作原理进行了分析。
最后列举了一些机械传动的应用案例,证明了机械传动在现实生活中的重要性和广泛性。
一、引言机械传动是将动力从一个地方传递到另一个地方的机械装置。
它作为机械工程学的基础内容,广泛应用于工业、农业、建筑等各个领域。
机械传动具有传递力量的功能,并能实现运动的改变、平衡、变速等目的。
本文将对机械传动的类型、原理以及应用进行详细介绍。
二、机械传动的类型机械传动可以分为多种类型,常见的有齿轮传动、皮带传动、链传动等。
齿轮传动是利用齿轮间的啮合来传递扭矩和运动的一种传动方式,具有传动效率高、传动比稳定等优点。
皮带传动则是通过绕在两个轮子上的带子来传递力量,常用于需要减速的场合。
链传动与皮带传动类似,但是链传动的传动效率更高,扭矩传递更稳定。
三、机械传动的工作原理1.齿轮传动:齿轮传动采用齿轮之间的啮合来实现传动的目的。
主要通过齿轮的大小、齿数来调整传递的速度和扭矩。
其中,齿轮的齿数比称为传动比,可以实现速度的改变。
齿轮传动通常包括齿轮轴、轴承、齿轮齿廓等组成部分。
2.皮带传动:皮带传动通过绕在轮子上的带子来传递力量。
常见的皮带传动有平行轴带传动和交叉轴带传动。
通过调整轮子的直径和材料来改变传递效果。
皮带传动具有传递动力平稳、减震效果好的特点。
3.链传动:链传动与皮带传动类似,也是通过绕在轮子上的链条来传递力量。
链传动具有噪音低、传动效率高等优点,广泛应用于自行车、摩托车等交通工具中。
四、机械传动的应用1.工业应用:机械传动在工业制造中有广泛的应用。
例如,齿轮传动被广泛应用于机床、起重机械、输送设备等,实现力量的传递和工作的协调。
皮带传动常用于风机、泵等需要平稳传递动力的设备中。
机械原理课程大作业
机械原理课程大作业基于MATLAB平面连杆机构运动学和动力学分析指导老师:王玉丹目录作业一:平面连杆机构运动学分析第2页作业二:平面连杆机构动力学分析第15页作业一L(AE)=70mm,L(AB)=40mm,L(EF)=60mm,L(DE)=35mm,L(CD)=75m m,L(BC)=50mm,原动件以等角速度W1=10rad/s回转。
试以图解法求在θ1=50°时C点的速度和加速度.对机构进行运动分析,写出C点的位置、速度及加速度方程。
解题过程:令AB=r1, BC=r2, CD=r3, DE=r4,AE=r6,EF=r8, AF=r7,角EAF=θ1。
分析:对机构进行位置分析由封闭形ABCDEA可得:r1+r2=r6+r3+r4 (1)由封闭图形AEFA可得:r7=r6+r8 (2)将(1)(2)两式整理可得:r2-r3-r4=-r1+r6-r8+r7=r6【一】(1)位置方程:【二】速度方程:【三】加速度方程:【四】根据位置方程式编制如下函数:【五】进行数据输入,运行程序进行运算。
根据上面分析的θ1 的极限位置取θ1 的范围为40°-55°并均分成15个元素:输出的P、矩阵的第二列到第四列分别是θ2 、θ3 、4θ4 的值,第一列是AF杆的长度r1’。
【六】第二步根据速度方程式编写如下函数:根据第一步得到的数据进行数据输入,运行程序计算各速度值。
程序如下:程序运行得到q矩阵,第一行到第三行分别是a2、a3、a4 的值,第四行是杆AF上滑块运动的速度,即F点的速度。
【七】第三步编写加速度计算函数:【八】根据第一步和第二步输入数据,运行程序得到各加速度的值:【1】计算C点在θ1 =55°,w1 =10rad/s时的速度,加速度:总结数据绘出各构件的位置、速度和加速度的表格如下:【2】输出图像1)角位置程序及输出的图像:2)F点速度程序及输出的图像:3)角加速度程序及输出的图像:4)F点的加速度程序及输出图像:作业二在图示的正弦机构中,已知:L(AB)=100mm,h1=120mm,h2=80mm, W1=10rad/s(常数),滑块2和构件3的重量分别为,G2 =40 N 和G3 =100 N,质心S2 和S3 的位置如图所示,加于构件3上的生产阻力Fr=400 N,构件1的重力和惯性力略去不计。
哈工大机械原理大作业3
Harbin Institute of Technology机械原理大作业三课程名称:设计题目:院系:班级:设计者:学号:指导教师:设计时间:哈尔滨工业大学大作业3 齿轮传动设计 1、设计题目1.1机构运动简图1.2机械传动系统原始参数2、传动比的分配计算由已知条件,电动机转速n=1450r/min ,输出转速n 1=27 r/min ,n 2=31 r/min ,n 3=37 r/min ,带传动最大传动比max p i =2.5,滑移齿轮传动最大传动比=4,定轴齿轮传动最大 传动比=4。
可求得:传动系统的总传动比为:11n ni == 1450/27=53.70322n ni == 1450/31=46.774 33n ni == 1450/37=39.189 传动系统的总传动比分别由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。
设带传的传送比为其最大传送比5.2max =p i ,滑移齿轮的传动比为321,,v v v i i i ,定轴齿轮传动的传动比为f i ,则总传动比由于1i > 2i > 3i ,故取1max 4v v i i ==则定轴齿轮传动部分的传动比为1max max5.37f p v i i i i ==滑移齿轮传动的传动比22max3.49v f p i i i i ==33m a x2.92v f p i i i i ==定轴齿轮传动由3对齿轮传动组成, 每对齿轮的传动比为:1.754d i ==≤3、齿轮齿数的确定滑移齿轮齿数3=v i 65622.9521z z == 2=v i 8766 3.4719z z ==1=v i 10967 3.9417z z ==齿轮7,齿轮8:719z = 866z =781()852a m z z =+=齿轮9,齿轮10:917z =1067z =此时已知条件为'a =85mm ,910211()842()ni i a m z z X X ==+=-∑mm ''arccos(cos )21.78a aαα==总变位系数:'910()0.552tan z z x inv inv ααα∑+=-=根据x ∑值和1093.94 3.0z uz ==>,按选择变位系数线图左部斜线⑤分配变位系数,得90.45x =齿轮5,齿轮6:5=21z662z =此时已知'a =85mm ,561()832a m z z =+= ''arccos(cos )23.42a a αα==100.10x =总变位系数:'65() 1.082tan z z x inv inv ααα∑+=-=根据x ∑值和652.953z u z ==>,按选择变位系数线图左部斜线④分配变位系数,得 50.5x =60.58x =定轴圆柱齿轮齿数=d i 1214111326 1.5317z z z z ===齿轮11,齿轮12:角度变位正传动。
机械原理课程设计大作业
机械原理课程设计大作业菠萝削皮机专业:机械设计制造及其自动化摘要本设计产品提供一种手摇立式菠萝削皮机,主要包括托盘、刀架、顶针架、V 型刀片、手柄或小型发动机、以及机械系统,包括传动系统、装夹系统、切削系统。
其中传动系统由直齿圆锥齿轮(14)与进给螺纹套管(13)固连,通过摇动手柄(18)和变速齿轮机构(17)将动力经直齿圆锥齿轮(15)与进给螺纹管道(13)组成的传递机构将动力传给的刀具夹紧法兰盘(12)从而带动刀具旋转;装夹系统由上顶钉及对顶螺母(3),下顶钉(5)组成;切削系统由刀架和V型刀具(6、7)以及刀片(16)组成。
该削皮机使用方便,安全可靠,切削菠萝和皮根效率高。
目录一、题目复述二、设计方案及结构图三、机械系统四、主要结构件参数五、设计总结和补充六、参考书目一、题目复述菠萝是人们普遍喜爱的一种热带水果。
菠萝虽好吃,但皮难削。
由于菠萝的皮为花苞片状的硬皮,并呈现螺旋状的排列,而且每个花苞片上面都有一个较深的“果眼”或“黑芯”。
通常,人们手工削菠萝皮的做法:一种是用锋利的水果刀先削去菠萝上的全部花苞片硬皮,然后再逐个挖去菠萝上残留的全部“果眼”;另一种是利用特制的U 型刀沿着菠萝花苞片和“果眼”排列的螺旋方向挖出一条深“沟”,连皮带“眼”一块去掉,需逐条螺旋线方向挖“沟”才能完成。
所以手工削皮不仅费时费力,不安全,不卫生,而且对菠萝果肉的浪费也较大。
虽目前市面上有一些水果削皮机的产品,但都不适合于菠萝水果削皮的需要。
因此,为了满足家庭、酒店、水果店或果贩使用,现需设计一种手动式或电动菠萝削皮装置。
图8.1菠萝表面的花苞片及“果眼”的分布形状如图1所示。
菠萝通常呈现未对称性的左右螺旋线排列,左右螺旋线的螺旋线的螺旋升角均约为40,每条螺旋线上的果眼数为7-12个,每个菠萝的螺旋线数为8条,而菠萝的高度与其直径之比为1.5左右,其高度一般在170mm——280mm范围之内。
我们根据市场商场见菠萝的大小以及其表面特性将其归类:二、设计方案及结构图我们经讨论及实验以后采用“V”型刀具剔除果眼及外表皮,对于未长果眼的部分则采取普通刀片(双向)切削方法去除。
机械原理大作业(平面六杆机构的运动分析)
a[3][1]=L[3]*cos((*p).theta[2]);
a[3][2]=L[5]*cos((*p).theta[3]);
a[3][3]=-L[6]*cos((*p).theta[4]);
b[0]=L[2]*cos((*p).theta[1])*(*p).w[0]*(*p).w[0]-L[3]*cos((*p).theta[2])*(*p).w[1]*(*p).w[1]+w1*w1*L[1]*cos((*p).theta[0]);
a[2][2]=-L[5]*sin((*p).theta[3]);
a[2][3]=L[6]*sin((*p).theta[4]);
a[3][0]=L[0]*cos((*p).theta[1]-Alpha);
a[3][1]=L[3]*cos((*p).theta[2]);
a[3][2]=L[5]*cos((*p).theta[3]);
#include "conio.h"
#define Alpha (PI/3)
#define PI 3.979
#define Angle (PI/180)
FILE *fp;
struct motion
{
int theta1;
double theta[5]; /*theta1,2,3,5,6*/
double w[4];/*w2,3,5,6*/
for(m=0;m<4;m++)
(*p).theta[m+1]=x[m];
printf("%d %d",n,i);
getchar();
机械原理大作业一 33题
机械原理大作业(一)作业名称:机械原理设计题目:连杆机构运动分析院系:机电工程学院班级: xxxxxx设计者: xxx学号: xxxxxx指导教师: xxxxx设计时间: 6.25---7.1哈尔滨工业大学机械设计一,运动分析题目二,建立以点G为原点的固定平面直角坐标系G-x,y三,对机构进行结构分析该机构由原动件AB(Ι级组),EFG(RRRⅡ级杆组),EHK(RRRⅡ级杆组),ECD(RRRⅡ级杆组)组成。
四,各基本杆组的运动运动分析数学模型(1)原动件AB(Ⅰ级组)已知原动件AB的转角ψ1=0~2π原动件AB的角速度ω1=10rad/s原动件AB的角加速度α1=0运动副A的位置坐标 XA=0 YA=0A点与机架相连,即该点速度和加速度均为0。
运动副A的速度 VxA=0 VyA=0运动副A的加速度 aXA=0 aYA=0原动件AB长度 lAB=200mm可求出运动副B的位置坐标 XA=XA+lABcosψ1 YB=YA+lABsinψ1 运动副B的速度 vXB=vXA-ω1lABsinψ1 vYB=vYA+ω1lABcosψ1运动副B的加速度aXB=aXA-ω12lABcosψ1-α1lABsinψ1aYB=aYA-ω12lABsinψ1+α1lABcosψ1(2)ECD (RRR Ⅱ级杆组)由(1)知B 点位置坐标、速度、加速度运动副D 点位置坐标 XD=XA+lADcos ψ2 YD=YA+lADsin ψ2D 点与机架相连,即该点速度和加速度均为0。
运动副D 的速度 v X D=0 v Y D=0运动副D 的加速度 a X D=0 a Y D=0杆BC 长 lBC=800mm杆CD 长 lCD=448mm可求得BC 杆相对于X 轴正方向转角Ψ3=2arctan ()00/()0202020(C A C B A B +-++)CD 杆相对于x 轴正方向转角Ψ4=arctan ((YC-YD )/(XC-XD ))其中,A0=2lBC(XD-XB)B0=2lBC(YD-YB)C0=l 2BC+l 2BD-l 2CDl 2BD=(XD-XB)2+(YD-YB)2求导可得BC 杆ω3、α3和CD 杆ω4、α4最后求导得vXC 、vYC 以及aXC 、aYCC 的轨迹即是E 的轨迹(3)EFG (RRR Ⅱ级杆组)运动副G点位置坐标 X G=XA+lAGcosψ5 YG=YA+lAGsinψ5G点与机架相连,即该点速度和加速度均为0。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理大作业
课程名称:机械原理
设计题目:连杆机构运动分析
院系:机械工程院
班级: xxxx
学号: xxxxx
设计者: xx
设计时间:2016年6月
一、题目
1-12:所示的六连杆机构中,各构件尺寸分别为:lAB =200mm,lBC=500mm,lCD=800mm,xF=400mm,xD=350mm,yD=350mm,w1=100rad/s,求构件5上的F点的位移、速度和加速度。
二、数学模型
1.建立直角坐标系
以F点为直角坐标系的原点建立直角坐标系X-Y,如下图所示。
2.机构结构分析
该机构由I级杆组RR(原动件AB)、II级杆组RRR(杆2、3)、II级杆组PRP (杆5、滑块4)组成。
3.各基本杆组运动分析 1.I级杆组RR(原动件AB)
已知原动件AB的转角
φ=0-2Π
原动件AB的角速度
w=10rad/s
原动件AB的角加速度
α=0
运动副A的位置
xA=-400,yA=0
运动副A的速度
vA=0,vA=0
运动副A的加速度
aA=0,aA=0
可得:
xB=xA+lAB*cos(φ)
yB=yA+lAB*sin(φ)
速度和加速度分析:
vxB=vxA-wl*AB*sin(Φ)
vyB=vyA+w*lAB*sin(φ)
axB=axA-w2*lAB*cos(φ)-e*lAB*sin(φ)
ayB=ayA-w2*lAB*sin(φ)+e*lAB*cos(φ)
2.II级杆组RRR(杆2、3)
杆2的角位置、角速度、角加速度
lBC=500mm,lCD=800mm,xD=350mm,yD=350mm,
ψ2=arctan﹛[Bo+﹙Ao²+Bo²-Co²﹚½]/﹙Ao+Bo﹚﹜
ψ3=arctan[﹙yC-yD)/(xC-xD)]
Ao=2*LBC(xD-xB) Bo=2*LBC(yD-yB)
lBD²=(xD-xB)²+(yD-yB)²
Co=lBC²+lBD²-lCD²
xC=xB+lBC*cos(ψ2)
yC=xB+lBC*sin(ψ2)
求导可得C点的角速度和角加速度。
3.II级杆组PRP(杆5、滑块4)
β=﹣arctan[﹙yC-yD﹚/﹙xC-xD)]
xF=0
yF=yD+xD*tan﹙β﹚-lEF
求导可得F点的速度和加速度.
三、程序设计
t=0:pi/50000:pi/50;
leng=length(t);
a=0;
x=-400+200*cos(a+100*t);
y=200*sin(a+100*t);
Vx=diff(x);
Vy=diff(y);
Ax=diff(x,2);
Ay=diff(y,2);
plot(x,y)
%由B点和D点确定杆的角位置、角速度和角加速度:
xb=200*cos(a + 100*t) - 400;
yb=200*sin(a + 100*t);
xd=350;
yd=350;
A0=2*500*(xd-xb);
B0=2*500*(yd-yb);
C0=500*500+(xd-xb).^2+(yd-yb).^2-800*800;
Q1=2.*atan(B0+(A0.*A0+B0.*B0-C0.*C0).^0.5/(A0+C0)); xc=xb+500*cos(Q1);
yc=yb+500*sin(Q1);
Q2=atan((yc-yd)./(xc-xd));
w1=diff(Q1);
w2=diff(Q2);
Vcx=diff(xc);
Vcy=diff(yc);
O1=diff(Q1,2);
O2=diff(Q2,2);
Acx=diff(xc,2);
Acy=diff(yc,2);
%已知杆CD的运动和移动副导路参数推出F点的运动:
EF=250;
xf=0;
yf=350+350*tan(pi-Q2)-EF;
Vfx=0;
Vfy=diff(yf);
Afx=0;
Afy=diff(Vfy);
for(m=1:(leng-1))
t1(m)=t(m);
end
for(m=1:(leng-2)) t2(m)=t(m); end
四、计算结果
令a=0,EF=250;
F点位移:
F点y方向位移图:
F点速度图:
F点加速度图:
(注:专业文档是经验性极强的领域,无法思考和涵盖全面,素材和资料部分来自网络,供参考。
可复制、编制,期待你的好评与关注)。