仿真转台的工作原理
转台工作原理

转台工作原理转台是一种常见的机械设备,它可以实现物体的旋转和转动,广泛应用于各种工业生产和日常生活中。
下面我们将详细介绍转台的工作原理。
首先,转台的工作原理主要依靠传动系统和控制系统。
传动系统包括电机、减速器、传动轴和轴承等部件,它们共同协作实现对转台的驱动和控制。
控制系统则包括传感器、控制器和执行器等部件,用于监测转台的运行状态和实现对转台的精准控制。
其次,转台的工作原理涉及到力学和动力学的知识。
当电机启动时,通过减速器和传动轴将动力传递给转台,使其产生旋转运动。
同时,传感器不断监测转台的角度和速度,并将反馈信号传输给控制器,控制器根据设定的参数对电机进行调节,实现对转台的精准控制。
另外,转台的工作原理还与轴承和润滑系统密切相关。
轴承能够减小转台的摩擦阻力,降低能量损耗,使转台的运行更加平稳和高效。
而润滑系统则能够减少轴承的磨损和摩擦,延长转台的使用寿命,保证其正常运行。
此外,转台的工作原理还涉及到结构设计和材料选择。
合理的结构设计能够提高转台的稳定性和承载能力,使其适用于不同的工作环境和工作条件。
而优质的材料选择则能够提高转台的耐磨性和耐腐蚀性,延长其使用寿命,降低维护成本。
总的来说,转台的工作原理是一个复杂的系统工程,它涉及到多个学科领域的知识和技术。
只有深入理解转台的工作原理,才能更好地应用和维护转台,提高其工作效率和使用性能。
通过本文的介绍,相信大家对转台的工作原理有了更深入的了解,希望能够对大家有所帮助。
在今后的工作和学习中,希望大家能够充分利用转台的工作原理,发挥其作用,为工业生产和生活提供更好的服务。
一种可全方位移动的三轴转台结构设计

一种可全方位移动的三轴转台结构设计摘要:本文介绍了一种适用于一些小型飞行器模拟测试的实验平台,按要求对其结构进行了设计,并制作了实验的样机。
该实验平台实现可以三个旋转自由度和地面的全方位移动,并且该平台不需要驱动元件,结构简便实用。
关键词:三轴转台;全方位移动;结构设计引言三维转台作为航空、航天研究中的关键地面设备是导航制导设备的关键,所以转台的技术研究一直受到发达国家航空航天领域的高度重视。
三轴转台是用于飞机,导弹,飞船等其他飞行器及地面半实物仿真的关键设备,它可在实验室环境内实时地模拟复现飞行器在空中的动力学特性和飞行器在空间进行中滚转、俯仰、偏航等的运动姿态,转台技术广泛应用于航空、航海、国防建设领域中。
目前,各国研究制作的转台都是带有驱动机构的大型控制转台,这些测试转台无论是机械结构还是测量控制系统都极其复杂,转台的制作使用成本昂贵,操作复杂;而且,这些平台大多是不可自由移动的。
这对于一些需要在地面自由移动的小型简易的实验飞行器和其他一些需要低成本半实物仿真的设备,显然是不适合。
而针对这种在地面自由移动,低成本,使用、操作方便的飞行器设备实验仿真测试平台。
本文提出一种新的可全方位移动的三轴转台设计。
1.结构设计1.1整体结构方案设计按照设计要求,本设计具体地说是一种可全方位移动的三轴转台,包括彼此转动连接的转动部分及移动平台,转动部分包括转杆、中环及外环,移动平台包括底座、支杆及万向轮,外环转动安装在底座上,底座上沿周向均布有多个支杆,每个支杆均连接有万向轮,通过万向轮实现水平方向前后、左右两个平移自由度;中环转动安装在外环内,转杆作为被测对象的载体转动安装在中环内,通过转杆相对于中环转动、中环相对于外环转动及外环相对底座转动实现三个旋转自由度,如图1所示。
图1 转台三维模型1.2转动部分结构设计转台的转动部分包括中间转杆、中环及外环,具体情况可以参照图1。
中环和外环采用的正八边形的形状。
仿真转台内部独立式运动控制卡的研究与实现

机 的运 动。所 以运 动控 制器是计算 机与伺服 电机的连接桥梁 。
2 设 计 依 据
它 的输入 接收光 电码盘 的单 端或差 动信号 , 对位置 信号进 行采集 , 通过适当的算法控制电机的运动 , 同时 与主机进行参数
维普资讯
・
2 4・
《 测控技术)07 第 2 )0年 2 6卷第 3 期
Байду номын сангаас
仿真转 台 内部独立式运动控制卡的研究与实现
崔高嵩
( 京瑞赛科技有 限公 司, 北 北京 10 2 ) 00 2
摘要 : 介绍 了一种独立式 多轴运动控制 器, 并对其工作 原理和工作方式进行 了分析 。此运动控制卡具有 集成度 高、 功耗低 、
程 如 图 1所示 。
备、 印刷机 械等设备 上。特别是 最适用 于非标 准设 备 的快速开 发 , 有非 常好 的发展 和经济效益 前景 。 具
目前 , 由于 以嵌入式 C U为代表的高速 高性能专用微 处理 P 器的 出现和 P C机的广 泛普 及廉价 化 , 开放式 运动 控制 器 的发
接 口简单等优点 , 可以更好地满足各种转 台的灵活性 、 实时性要 求 。该卡采 用独立 式结 构 , 直接安装在 台体 内部 , 于野外 适
使 用。
关键词 : 飞行 仿 真 转 台运 动 控 制 ; 动控 制 器 ;I 服 控 制 运 PD伺 中 图 分 类 号 :P 9 T2 文献标识码 : A 文章 编 号 :0 0— 8 9 20 ) 3- 0 4— 3 10 82 ( 0 7 0 0 2 0
Ke r s moi n c n r l f ih i lt r moin c n r l r P D ev o t l y wo d : t o t g tsmu ao ; t o t l ; I s r o c n r o o of l o oe o
三轴虚拟仿真转台系统设计及实现_刘正华

作者简介: 刘正华, 北京航空航天大学博士研究生, 研究方向: 虚拟样机, 建模与仿真, ,() 2 0’( 2 0’5 。
计算机工程与应用
!""#$%&
!N
箱中提供了简单的线性控制模块和滤波模块, 可以方便地实现 前置滤波、 ’() 控制和其他连续时间系统的模拟仿真。 另 一 种 方法是使用 *+,-.+/ 模块,将机械系统仿真分析工具同控制设 计仿真软件有机地联系起来, 最终实现整个虚拟样机系统的设 计与开发。在实际系统开发中, 后一种方法可以很方便将机械 模型与先进控制率有机结合起来, 进行联合仿真; 同时可以简 化数学模型的建立,最终获得该控制率下的机电联合仿真结 果。 该文正是采用后者方法, 建立起虚拟转台系统模型, 通过加 载控制率进行机电联合仿真分析, 最终输出分析结果。
调用接口, 将转台零件图形库调入软件平台实现模型装配; 再通过 ’(’)* 与 )’KL’M 软件之间的仿真接口, 将控制器 调入转台样机; 最终实现机械模型和控制方法的联合仿真分析, 获得虚拟转台的特性, 包括样机传函和三框运行动 静 态 精度等特性状况。 关键词 虚拟仿真转台 虚拟样机 虚拟装配
虚拟仿真转台联合仿真分析及其实验结果
该 文 利 用 0)012 软 件 实 现 了 三 轴 虚 拟 仿 真 转 台 的 设 计
与开发。通过先对转台样机进行模态分析( 该文仅以某型转台 , 内框作为研究对象) , 获 得 该 型 转 台 内 框 名 义 传 递 函 数 ! "( #) 见公式( ; 同 时 利 用 24BC/4,D 设 计 系 统 ’) 参 数 及 前 馈 传 递 %) , 取名义传函的倒数, 且 % 取值为 "$& 。然后将 函数 ! $ ( #) ! $( #) 虚拟仿真转台系统的机械模型和控制率有机结合, 进行联合仿 真来设计和仿真真实转台系统, 如图 & 所示。
仿真转台误差分析及误差建模

p icpeo l —b d ytm ie t s tetp lgc t cue n o r il f n mu t i o ysse kn mai . oo ia s trsa d lw—od rb d ra so li o yss c h o l r u re o yary f mut—b d y— tm r x aitd,te h o srcinmeh do h rce si mar sp t owad ae nc aatrsi ma e aeep t e a h n tec nt t to fc aatr t t xi u r r .B sd o h rce t - u o i c i f i c
关键词 : 仿真转 台 ; 系统运动学 ; 多体 误差模型 ; 空间误 差
中图分类号 :P 0 . ;P 3 T 222T37 文献标识码 : A
Er o ay i n r r M o ei g o i l t n Tu n a l r r An lss a d Er o d l fS mu a i r t b e n o
AB TRACT:Co c r i g t e sr cu e a d p n i l fa t r e— a i a l ,ti a e ic se l ei rf co s S n e nn t tr n d c pe o h e h u xs tb e h s p p rd s u s s a l l a tr 。 ' o whc f c st e s a e er ro y tm,a d s mma ie l ou t c e o o r e—a i tb e a e n te b s c ih af t h p c ro fs se e n u r s a lmer r l ft e z l v i  ̄ h x s a l .B s d o h a i
转台计算机伺服控制系统设计
转台计算机伺服控制系统设计飞行仿真转台为高精度的复杂控制系统,是地面半实物仿真的关键设备,用以模拟飞行器在空中的各种动作和姿态,包括偏航、滚转和俯仰,实际上是一种电信号到机械运动的转换设备。
把高精度传感器如陀螺仪、导引头等安装于转台之上,将飞行器在空中的各种姿态的电信号转化为转台的三轴机械转动,以使陀螺仪、导引头等敏感飞机的姿态角运动。
“高频响、超低速、宽调速、高精度”成为仿真转台的主要性能指标和发展方向。
其中,“高频响”反映转台跟踪高频信号的能力强;“超低速”反映系统的低速平稳性好;“宽调速”可提供很宽的调速范围;“高精度”指系统跟踪指令信号的准确程度高。
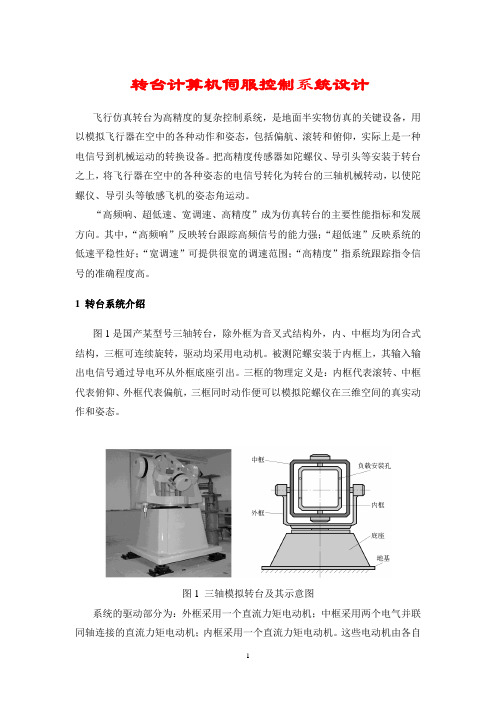
1 转台系统介绍图1是国产某型号三轴转台,除外框为音叉式结构外,内、中框均为闭合式结构,三框可连续旋转,驱动均采用电动机。
被测陀螺安装于内框上,其输入输出电信号通过导电环从外框底座引出。
三框的物理定义是:内框代表滚转、中框代表俯仰、外框代表偏航,三框同时动作便可以模拟陀螺仪在三维空间的真实动作和姿态。
图1 三轴模拟转台及其示意图系统的驱动部分为:外框采用一个直流力矩电动机;中框采用两个电气并联同轴连接的直流力矩电动机;内框采用一个直流力矩电动机。
这些电动机由各自的脉冲调宽放大器(PWM)提供可控直流电源。
三框各有一个测速发电机和一个感应同步器,用以实时检测框架的旋转角速度和角位置。
不同用途的测试转台的对性能指标的要求也不同。
一般转台的主要技术指标包含:静态精度(达到千分之几度)、角速度范围(从千分之几度/秒到几百度/秒)、频率响应要求较宽,并具有一定的负载能力要求,且三个框架都具有最大速率的限制。
2 三轴测试转台的总体控制结构转台三个框架的控制是相互独立的,因此转台的控制系统可以采用如图2所示的原理方案。
该系统为上下位机结构的计算机控制系统。
以一台工控机作上位机,实现对伺服系统的监控、检测和管理。
上位机提供操作者的人机界面,实现对整个转台系统的在线检测、安全保护、性能检测和系统的运动管理以及数据处理。
转台工作原理

转台工作原理
转台是一种将信号源从一个设备传输到另一个设备的机制。
它的工作原理主要涉及信号的输入、处理和输出。
转台首先接收输入信号源,这可以是电视、无线电、音频设备或其他各种设备。
输入信号源可以通过电缆、天线、卫星信号等方式传输。
一旦输入信号源被接收,转台开始对信号进行处理。
这个过程涉及到信号选择、调谐和解码。
信号选择是指从输入信号源中选择一个特定的信号。
调谐是为了从信号中提取出正确的频率和通道。
解码则是将信号转换成可读或可播放的形式,以供输出。
处理完成后,转台将处理后的信号传送到输出设备,如电视、扬声器等。
输出设备可以将信号转换成可视、可听或可感知的形式,供用户观看、听取或使用。
整个转台过程可以实现信号的传输和转换,以满足用户对不同类型信号的需求。
转台通常具有多个输入接口和多个输出接口,以便连接多个信号源和多个输出设备。
通过调节转台的设置,用户可以方便地切换不同的信号源和输出设备。
这使得转台成为现代多媒体应用中的一个重要组成部分。
旋转工作台的工作原理

旋转工作台的工作原理
旋转工作台的工作原理是通过电机或液压系统驱动工作台座椅或工作平台实现旋转运动。
具体步骤如下:
1. 电机或液压系统提供动力:旋转工作台的驱动系统通常由电机或液压系统提供动力。
电机会通过传动装置(如齿轮或皮带传动)使工作台旋转,液压系统则会通过液压油压力产生力矩来驱动工作台旋转。
2. 控制系统控制运动:旋转工作台的运动是通过控制系统来操作的。
控制系统可以是手动控制,也可以是自动化控制。
手动控制通常通过按钮、开关或手柄等方式来实现,而自动化控制则通过程序运行或传感器反馈信号来控制旋转速度和位置。
3. 传递动力至工作台:驱动系统通过传动装置将动力传递至工作台,使其开始旋转。
传动装置可以是直接连接,例如直接将电机轴与工作台连接,或者间接连接,例如通过齿轮传动或链条传动。
4. 工作台旋转运动:一旦动力传递到工作台,工作台开始旋转。
工作台的旋转角度和速度可以根据需求进行调整,以满足特定工作需求。
旋转工作台通常具有可调节的旋转速度和旋转方向。
5. 安全机制:旋转工作台应配备相应的安全机制,以确保操作人员的安全。
例如,可以安装防护罩、安全开关或限位开关,
以避免意外事故发生。
总的来说,旋转工作台的工作原理是通过驱动系统驱动工作台旋转,控制系统控制旋转运动,并通过传动装置将动力传递到工作台上,以达到旋转工作台的目的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
仿真转台的工作原理
仿真转台是一种用于模拟载体在空间中的定向运动的设备,它广泛应用于飞行模拟器、船舶模拟器、汽车模拟器等领域。
通过模拟转台的运动,可以让操作者感受到真实载体运
动时的视觉、听觉和触觉感受,从而提高培训和测试的逼真程度。
本文将从仿真转台的工
作原理、结构和应用领域等方面进行详细介绍。
一、仿真转台的工作原理
1. 传统仿真转台
传统仿真转台主要由电机、传动机构、控制系统和载体支撑系统等组成。
电机通常采
用直流电机或交流电机,通过控制电机的启停、转速和转向等来实现转台的运动。
传动机
构一般采用减速器、联轴器等装置,用于传递电机的运动到转台上。
控制系统则负责对电
机的运动进行精确控制,根据模拟载体的运动要求进行相应的运动控制。
载体支撑系统主
要用于支撑和固定要模拟的载体,以防止在转台运动过程中产生不稳定或不安全的情况。
2. 惯性仿真转台
惯性仿真转台是一种利用离心力产生载体仿真运动的新型仿真设备。
它的工作原理是
通过旋转载体,产生离心力,进而模拟载体的加速度和角速度变化。
惯性仿真转台通常由
旋转体、驱动装置、传感器和控制系统等组成。
驱动装置通过电机或液压装置提供旋转能量,传感器用于实时监测旋转体的角度和速度,控制系统则根据监测结果对驱动装置进行
精确控制。
惯性仿真转台不仅可以模拟载体的转向运动,还可以模拟载体的加速度和角速
度变化,具有更高的仿真真实度。
二、仿真转台的结构
1. 传统仿真转台的结构
传统仿真转台的结构主要包括转台平台、运动系统、支撑系统、传感系统和控制系统
等部分。
转台平台是载体放置的地方,通常有不同尺寸和形状的平台可供选择。
运动系统
由电机、传动装置和联轴器等组成,用于产生转台的运动。
支撑系统主要用于固定和支撑
模拟的载体,通常采用液压支撑或机械支撑的方式。
传感系统用于监测转台的运动状态,
包括角度、速度和加速度等参数。
控制系统则负责对运动系统进行精确的控制,根据模拟
要求进行相应的运动模拟。
2. 惯性仿真转台的结构
惯性仿真转台的结构主要包括旋转体、驱动装置、传感器和控制系统等部分。
旋转体
是惯性仿真转台的核心部件,通过旋转产生模拟载体的运动。
驱动装置提供旋转能量,通
常采用电机或液压装置。
传感器用于监测旋转体的角度和速度,以及模拟载体的运动状态。
控制系统则根据传感器的监测结果对驱动装置进行精确的控制,实现对载体的运动模拟。
三、仿真转台的应用领域
1. 飞行模拟器
飞行模拟器是仿真转台的经典应用之一,通过模拟飞行器在空中的动态特性,在视觉、听觉和触觉上为飞行员提供真实的飞行体验。
飞行模拟器通常配备有仿真转台来模拟飞机
的俯仰、滚转和偏航等运动,使飞行员能够感受到飞机在空中飞行时的运动状态,从而提
高培训的逼真程度。
2. 船舶模拟器
船舶模拟器也是仿真转台的重要应用领域之一,通过模拟船舶在海上的运动特性,为
船舶驾驶员提供真实的航行体验。
船舶模拟器通常配备有仿真转台来模拟船舶在海上的摇晃、颠簸和倾斜等运动,使驾驶员能够感受到船舶在海上航行时的运动状态,从而提高培
训的逼真程度。
3. 汽车模拟器
汽车模拟器是仿真转台的另一重要应用领域,通过模拟汽车在路面行驶的动态特性,
为驾驶员提供真实的驾驶体验。
汽车模拟器通常配备有仿真转台来模拟汽车的转弯、加速
和刹车等运动,使驾驶员能够感受到汽车在路面行驶时的运动状态,从而提高培训的逼真
程度。
仿真转台是一种用于模拟载体定向运动的设备,它的工作原理主要包括传统仿真转台
和惯性仿真转台两种类型,结构包括转台平台、运动系统、支撑系统、传感系统和控制系
统等部分。
在飞行模拟器、船舶模拟器和汽车模拟器等领域有着广泛应用,能够提高培训
和测试的逼真程度。