步进电机转台的控制
步进电机控制方法

步进电机控制方法步进电机是一种将电脉冲信号转换为角位移的执行器,广泛应用于打印机、数控机床、纺织机械、包装设备等自动控制系统中。
步进电机控制方法的选择对于系统的性能和稳定性具有重要影响,下面将介绍几种常见的步进电机控制方法。
1. 开环控制。
开环控制是最简单的步进电机控制方法之一,通过给步进电机施加一定的脉冲信号来控制其旋转角度。
这种方法简单直接,但无法对步进电机的运动状态进行实时监测和调整,容易出现失步现象,适用于对精度要求不高的场合。
2. 半闭环控制。
半闭环控制是在开环控制的基础上增加了位置传感器反馈的控制方法。
通过位置传感器实时监测步进电机的位置,将反馈信息与设定值进行比较,从而实现对步进电机位置的闭环控制。
这种方法相比于开环控制能够更好地提高系统的稳定性和精度,但仍然存在一定的失步风险。
3. 闭环控制。
闭环控制是最为精确的步进电机控制方法,通过在步进电机上增加编码器等位置传感器,实时反馈步进电机的位置信息,并对其进行精确控制。
闭环控制能够及时调整步进电机的运动状态,减小失步风险,提高系统的稳定性和精度,适用于对位置精度要求较高的场合。
4. 微步进控制。
微步进控制是一种通过改变步进电机相序激励方式,使步进电机在每个步距内分成多个微步距的控制方法。
微步进控制能够提高步进电机的分辨率,减小振动和噪音,提高系统的平稳性和精度,适用于对步进电机运动要求较高的场合。
总结。
在实际应用中,步进电机控制方法的选择应根据具体的控制要求和系统性能需求来确定。
不同的控制方法各有特点,开环控制简单直接,但精度较低;半闭环控制提高了系统的稳定性和精度,但仍存在失步风险;闭环控制精度最高,但成本较高。
微步进控制能够提高步进电机的平稳性和分辨率,但相应的控制电路较为复杂。
因此,在选择步进电机控制方法时,需要综合考虑系统的实际需求和成本因素,选择最合适的控制方法来实现系统的稳定运行和高精度控制。
步进电动机的控制
αmin—负载轴要求的最小位移增量(即每个脉冲对应的最小角位 移增量)
➢步距脚θb也可用分辨率bs来表示:bs=360°/ θb(步/转)
➢ 当步进电机拖动的机械作直线运动时,用丝杠作运动转换器,步进电 t/ t
δ—直线增量运动当量(mm/每步)
360 tb z
因为每通电一次(即运行一拍),转子就走一步,各相绕
组轮流通电一次,转子就转过一个齿距。故步距角:
b
齿距 拍数
齿距 Km
360 Kmz
K--定子绕组通电方式系数。相邻两次通电的相数一样,取K=l,如三 相单三拍、三相双三拍工作方式;反之,取K=2,如三相单双六拍工作方 式。(拍数/相数)
步距精度Δθb应满足: b i(L )
ΔθL—丝杠传动精度
2)最大静转矩
步进电动机的静特性,是指步进电动机在稳定状态(即步进电动机不改 变通电情况的运行状态)时的特性,包括静转矩、矩角特性及静态稳定区。
静转矩:指步进电动机处于稳定状态下的电磁转矩。它是绕组电流和失 调角的函数。
在稳定状态下,如果在转子轴上加一负载转矩使转子转过一个角度θ, 并能稳定下来,这时转子受到的电磁转矩与负载转矩相等,该电磁转矩即 为静转矩,而角度θ即为失调角(或:电机定子齿与转子齿中心线之间的 夹角叫做失调角)。
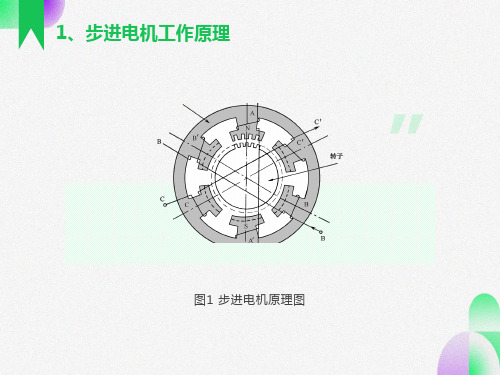
(一)反应式步进电机的结构
1.单段(径向式)三相反应式步进电机的结构原理图
主要由定子和转子两部分组成。
• 定子铁芯由硅钢片叠压而成,定子上有六 个均匀分布的极,每两个为一对。定子绕 组是绕置在定子上的六个均匀分布铁芯齿 上的线圈,它把沿直径方向上相对的两个 齿上的线圈串联在一起,构成一相控制绕 组。图中所示的步进电机为A、B、C三相 控制绕组,故称为三相步进电机。当任一 相绕组通电时,便形成一对定子磁极,即 形成N、S极。 在定子的每个磁极上,即定子铁芯的每 个齿上又开了五个小齿,齿槽等宽,齿间 夹角为9°,在空间位置上依次错开1/3齿 距其展开图如图所示。
步进电机控制方法
步进电机控制方法步进电机是一种常见的电动执行器,广泛应用于各个领域的控制系统中。
它具有结构简单、控制方便、定位精度高等优点,是现代自动化控制系统中必不可少的重要组成部分。
本文将从基本原理、控制方法、应用案例等方面对步进电机进行详细介绍。
1. 基本原理步进电机是一种通过输入控制信号使电机转动一个固定角度的电机。
其基本原理是借助于电磁原理,通过交替激励电机的不同线圈,使电机以一个固定的步距旋转。
步进电机通常由定子和转子两部分组成,定子上布置有若干个线圈,而转子则包含若干个极对磁体。
2. 控制方法步进电机的控制方法主要包括开环控制和闭环控制两种。
开环控制是指根据既定的输入信号频率和相位来驱动电机,控制电机旋转到所需位置。
这种方法简单直接,但存在定位误差和系统响应不稳定的问题。
闭环控制则是在开环控制的基础上,增加了位置反馈系统,通过不断校正电机的实际位置来实现更精确的控制。
闭环控制方法相对复杂,但可以提高系统的定位精度和响应速度。
3. 控制算法控制步进电机的常用算法有两种,一种是全步进算法,另一种是半步进算法。
全步进算法是指将电流逐个向电机的不同线圈通入,使其按照固定的步长旋转。
而半步进算法则是将电流逐渐增加或减小,使电机能够以更小的步长进行旋转。
半步进算法相对全步进算法而言,可以实现更高的旋转精度和更平滑的运动。
4. 应用案例步进电机广泛应用于各个领域的控制系统中。
例如,在机械领域中,步进电机被用于驱动数控机床、3D打印机等设备,实现精确的定位和运动控制。
在医疗设备领域,步进电机被应用于手术机器人、影像设备等,为医疗操作提供准确定位和精确运动。
此外,步进电机还广泛应用于家用电器、汽车控制、航空航天等领域。
总结:步进电机作为一种常见的电动执行器,具有结构简单、控制方便、定位精度高等优点,在自动化控制系统中扮演着重要的角色。
通过本文的介绍,我们了解到步进电机的基本原理、控制方法、算法以及应用案例等方面的知识。
步进电机控制器的工作原理

步进电机控制器的工作原理步进电机控制器是用来控制步进电机的设备,它通过向步进电机提供电流和脉冲信号来驱动电机旋转,并控制电机的运动精度和速度。
本文将详细解释步进电机控制器的工作原理,并提供易于理解的解释。
1. 步进电机基本原理在了解步进电机控制器的工作原理之前,首先需要了解步进电机的基本原理。
步进电机是一种转动电机,它的转动是以确定的步长进行的,每步的转动角度是固定的。
步进电机由定子和转子构成,定子上有多对绕组,每对绕组分别对应一个相位。
转子上有多对磁极,与定子绕组的极性相反。
当绕组通电时,会产生一个磁场,与转子上的磁极相互作用,从而使转子发生转动。
步进电机的转动是通过改变绕组通电的顺序来实现的,这种改变电流方向的操作称为相位控制。
步进电机的最小转动单位称为步进角,一般为1.8度或0.9度。
通过控制电流的相位控制,可以实现步进电机精确的转动。
2. 步进电机控制器的组成步进电机控制器通常由以下几个组件组成:2.1 电源步进电机控制器需要提供适量的电流和电压来驱动步进电机。
电源可以是交流电源或直流电源,通常需要根据步进电机的需求选择适当的电源。
2.2 电流驱动器电流驱动器作为步进电机控制器的核心部件,负责向步进电机提供恒定的电流,并将控制信号转化为电流信号。
电流驱动器可以根据不同的控制方式分为两种类型:常流驱动器和常压驱动器。
常流驱动器是最常见的电流驱动器类型,它通过调节电压来控制电流大小,保持恒定的电流输出。
常压驱动器则通过调节电流源的电压来输出恒定的电流。
控制器是步进电机控制器的核心部件,它负责接收输入信号,并生成脉冲信号来控制步进电机的旋转。
控制器通常由微处理器或专用的控制芯片组成,它可以接收来自外部设备的命令,并将其转化为脉冲信号,以驱动步进电机按照设定的步进角度旋转。
控制器还可以实现一些额外的功能,如速度调节、方向控制、加减速度控制等。
2.4 接口步进电机控制器通常需要与外部设备进行通信,如计算机、PLC等。
步进电机控制

步进电机控制工具/原料要想实现步进电机的控制首先有具备如下器材:1、步进电机2、步进电机驱动器3、控制器4、开关电源5、感应开关方法/步骤1:正确选择器材:1、选择步进电机:根据需要的力矩、转速等数据选择合适的步进电机,步进电机要选择合适的工作电压,通常选择直流24V比较合适,容易与控制器共用一个开关电源。
2、步进电机驱动器:步进电机驱动器一定要和步进电机配套使用,因此在购买步进电机的时候,最好同时配套好驱动器,减少以后的麻烦,步进电机驱动器应该具有脉冲+方向控制方式。
3、控制器:可以选择表控TPC8-8TD的控制器,为什么选择这个控制器呢,因为这个控制器使用很方便,使用比较普遍,资料也比较全。
采用表格设置方式,不用编程,一般人员也可以使用,可以显著加快开发进度,减少不必要的麻烦。
接线也非常简单,可以参考接线原理图接线,应该比较顺利。
4、开关电源:记住我说的经验,步进电机的电源尽量使用开关电源,这是一种以开关方式工作的稳压电源,是将交流220V变为直流电压的专门用来做工业控制的电源。
抗干扰能力强,允许输入电源的波动范围宽。
可以供步进电机和控制器使用,尽量选择输出是直流24V 的开关电源,电流大小根据负载大小来选择,电流是全部负载电流的和,留有一定余量。
例如:步进电机是3A的,控制负载电流2A,开关电源选6A至8A的,功率大约是150瓦至200瓦之间。
6、使用步进电机一般至少需要一个感应开关,原点、定位、限位等动作控制,根据实际需要来选择感应开关的数量。
感应开关有磁性开关、接近开关、光电开关、激光开关等等,完全根据需要来选择。
可以根据安装位置,检测距离、尺寸大小、精度高低等等因素来考虑最为合适的类型。
感应开关的供电电压直流24V的NPN常开的。
可以很方便地与表控的输入端配合。
方法/步骤2:初步调试:(在电脑前进行)1、在电脑前进行初步调试,是调试的捷径,可是调试工作方便、快捷、顺利。
2、将控制器接好电源,数据线插到电脑USB插口,另一端插到控制器下载接口。
步进电机控制系统原理
2、步进电机控制系统原理
三相单三拍
PC.7
PC.6
PC.5
PC.4
PC.3
PC.2C相
PC.1B相
PC.0A相
1
0
0
0
0
0
0
0
1
A
01H
2
0
0
0
0
0
0
1
0
B
02H
3
0
0
0
0
0
1
0
0
C
04H
2、步进电机控制系统原理
用 P1口 的 P1.2 、P1.1、P1.0 对应 C、B、A 相 进行控制 。
(3)程序 根据图4-46可写出如下步进电机控制程序
3、步进电机与微型机的接口及程序设计
AJMP DONE ;A=0,转DONE LOOP2: MOV P1,03H ;反向,输出第一拍 ACALL DELAY ;延时DEC A;A=0,转DON JZ DONE MOV P1,05H ;输出第二拍 ACALL DELAY ;延时 DEC A JZ DONE ; MOV P1,06H ;输出第三拍 ACALL DELAY ;延时 DEC A ;A≠0,转LOOP2 JNZ LOOP2 DONE: RET DELAY:
3、步进电机与微型机的接口及程序设计
ORG 0100H ROUNT1:MOV A,#N ;步进电机步数→A JNB 00H,LOOP2 ;反向,转 LOOP2 LOOP1: MOV P1,#03H ;正向,输出第一拍 ACALL DELAY ;延时 DEC A ;A=0,转DONE JZ DONE MOV P1,06H ;输出第二拍 ACALL DELAY ;延时 DEC A ;A=0,转DONE JZ DONE MOV P1,05H ;输出第三拍 ACALL DELAY ;延时 DEC A ;A≠0,转LOOP1 JNZ LOOP1
步进电机控制说明

实训名称步进电机控制一、实训目的1.掌握步进电机控制系统的接线、调试、操作二、实训设备序号名称型号与规格数量备注1实训装置THHAJS-1 12实训挂箱B10 13导线3号若干45通讯编程电缆SC-90 1 三菱6实训指导书THHAJS-1 17计算机(带编程软件) 1 自备三、面板图+四、控制要求1.总体控制要求:如面板图所示,利用可编程控制器输出信号控制步进电机运行。
2.按下“SD”启动开关,系统准备运行。
3.打开“MA”手动开关,系统进入手动控制模式,选择电机旋转方向,再按动“SE”单步按钮,步进电机运行一步。
4.关闭“MA”手动开关,系统进入自动控制模式,此时步进电机开始自动运行。
5.分别按动速度选择开关“V1”、“V2”、“V3”,步进电机运行在不同的速度段上。
6.步进电机开始运行时为正转,按动“MF”开关,步进电机反方向运行。
再按动“MZ”开关,步进电机正方向运行。
五、功能指令使用及程序流程图六、端口分配及接线图1.端口分配及功能表 序号 PLC 地址(PLC 端子)电气符号(面板端子) 功能说明1 X00 SD 启动开关2 X01 MA 手动3 X02 V1 速度14 X03 V2 速度25 X04 V3 速度36 X05 MZ 正转7 X06 MF 反转8 X07 SE 单步 9Y00 A A 相 10 Y01 B B 相 11 Y02 C C 相 12 Y03DD 相 13 面板V+ 接电源+24V电源正端 14主机COM 、COM0、COM1、COM2接电源GND电源负端2.PLC 外部接线图七、操作步骤1. 检查实训设备中器材及调试程序。
2.按照I/O端口分配表或接线图完成PLC与实训模块之间的接线,认真检查,确保正确无误。
2.打开示例程序或用户自己编写的控制程序,进行编译,有错误时根据提示信息修改,直至无误,用SC-90通讯编程电缆连接计算机串口与PLC通讯口,打开PLC主机电源开关,下载程序至PLC中,下载完毕后将PLC的“RUN/STOP”开关拨至“RUN”状态。
步进电机控制5页word文档
步进电机的一些基本参数电机固有步距角它表示控制系统每发一个步进脉冲信号,电机所转动的角度。
电机出厂时给出了一个步距角的值,如86BYG250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为‘电机固有步距角’,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
通常步进电机步距角β的一般计算按下式计算。
β=360°/(Z·m·K)式中β―步进电机的步距角;Z―转子齿数;m―步进电动机的相数;K―控制系数,是拍数与相数的比例系数步进电机的相数是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。
电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72° 。
在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己步距角的要求。
如果使用细分驱动器,则‘相数’将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。
保持转矩(HOLDING TORQUE)是指步进电机通电但没有转动时,定子锁住转子的力矩。
它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。
由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。
比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m 的步进电机。
DETENT TORQUE:是指步进电机没有通电的情况下,定子锁住转子的力矩。
DETENT TORQUE 在国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机转台的控制
摘要:本文运用A T89C51单片机、键盘和LED专用智能控制芯片HD7279A、步进电机环形分配器L297、步进电机驱动器L298N构成了一套步进电机转台控制系统,实现单片机识别并输出显示键盘输入的数据信息(转角)并产生连续脉冲控制步进电机转动,进而带动转动台转动的任务。
关键词:单片机,步进电机驱动
一、前言
在进行热对流式加速度传感器温度特性研究中,需将传感器系统放置在一个可在纵向进行三百六十度旋转的旋转台上,并将旋转台放入恒温试验箱中,利用当旋转台旋转时传感器敏感面方向感受的重力加速度发生变化这一现象,检测传感器的灵敏度的变化。
为使测量数据可靠,控制系统采用步进电动机作为驱动,通过控制转动的步数(角度),使转动台转过一个角度,待传感器的输出数据稳定以后即可记录有关数据。
为实现这一功能,研制了用单片机控制的步进电机转台。
二、系统的总体设计
步进电动机工作,需要步进电机线圈的励磁信号,还需要功率放大器根据该信号产生驱动电流。
专门为步进电机设计的环形分配器和功率驱动器可以实现这种功能。
通过键盘输入控制信息,包括电机的转向、转角等。
单片机接收这些信息并产生相应的控制信号传送给电机控制器;同时单片机还要控制多位数码管显示键盘所输入的信息和实际转动的情况。
根据实际需要,人机交互通过4×4行列式键盘和一对4联LED数码管来实现;按键输入与LED显示器由控制芯片HD7279A来控制;单片机选用AT89C51 Flash单片机;由于测量范围并不要求倾斜角度变化的分度非常细密,选用成本较低的两相步进电动机42BYG121,其步进角为1.8度,通过半步驱动方式进行细分可获得0.9度的步进角;环形分配器和电机驱动器选用L297和L298N芯片,由L297将单片机给出的连续脉冲转换成步进电机所要求的相绕组脉冲序列;再由L298N对相脉冲信号进行放大,驱动步进电机转动。
最终系统总体方案如图1所示。
图1 控制系统结构框图
系统的工作过程如下:系统利用键盘输入数值,通过HD7279A芯片将输入的按键键值传送到单片机,单片机识别键值所代表的是数据还是功能键,或者传送数据经过HD7279A驱动LED数码管显示,或者根据输入数值确定步进电机的转角,输出一定的脉冲
信号,并由L297转换成步进电动机各相的相脉冲,经过L298N放大驱动步进电动机,由步进电动机带动机械部分转动。
三、主要接口与编程实现
数据输入与显示接口芯片采用HD7279A,它是一个具有串行接口的,可同时驱动8位共阴式LED数码管的智能显示驱动芯片,该芯片同时还可连接多达64键的键盘矩阵,单片即可完成LED显示、键盘接口的全部功能。
HD7279A内含译码器,可直接接受BCD 码或16进制码,并同时具有2种译码方式,此外还具有多种控制指令,如消隐、闪烁、左移、右移、段寻址等。
HD7279A的控制指令分为二大类:纯指令和带有数据的指令。
纯指令包括测试、移位显示、复位等,共计六条,对应的控制码是从0xBF到0xA4;带数据的指令包括显示数据、消隐控制、读出键码等,指令格式是控制字+数据。
用C51编程,实现对HD7279A发送一个字节的指令或数据的例程如下:
void send_byte(unsigned char out_byte){
unsigned char i;
cs=0;
long_delay();
for (i=0;i<8;i++){
if (out_byte&0x80)
dat=1;
else
dat=0;
clk=1;
short_delay();
clk=0;
short_delay();
out_byte=out_byte*2;
}
dat=0;
}
发送带数据的指令可利用下面的例程来实现:
void write7279(unsigned char cmd, unsigned char dta){send_byte (cmd);
send_byte (dta);
}
从HD7279A读出数据的例程如下:
unsigned char read7279(unsigned char command){
send_byte(command);
return(receive_byte());
}
定义有关的命令字如下:
#define CMD_RESET 0xa4
#define DECODE0 0x80
#define DECODE1 0xc8
#define CMD_READ 0x15
#define UNDECODE 0x90
#define BLINKCTL 0x88
……
要控制与HD7279A连接的LED,利用下面的程序行即可实现:
send_byte(CMD_RESET); //复位HD7279A
write7279(BLINKCTL,0xf8); //第1、2、3 位设置为闪烁显示
write7279(UNDECODE,0X08); //在第1位显示下划线
write7279(DECODE0,value); //按0方式解码显示数字
write7279(DECODE1,value); //按1方式解码显示数字
环形分配器L297的核心是脉冲分配器,它可以产生三种相序信号,对应于三种不同的工作方式:半步方式,一相激励方式,两相激励方式。
它接收来自控制器的信号有:CW/ CCW 正/反转(17脚),HALF/ FULL 半步/基本步距(19脚),STEP 步进脉冲(18脚)。
为了在现有硬件基础上达到最佳的使用效果,步进电机按半步方式运转,此时L297的工作时序如图2所示:
系统选用的功率放大器L298N,是一种H型双极性驱动器,D1~D4四个二极管组成桥式续流回路。
使用上述H桥功放,每相绕组必须用一个H桥。
L298N为双H桥高电压大电流功率集成电路,可用来驱动继电器、线圈、直流电动机和步进电动机等电感性负载。
L297步进电机控制器与L298N双H桥驱动器组成典型的集成步进电机微控制器。
其连接电路如图3所示。
其中8个二极管D1~D8为与L298N芯片及步进电动机连接,组成H桥的续流电路。
四、系统控制的实现
图4
为了方便控制与编程,按键的响应方式采用中断方式,在有按键按下时HD7279将发出一个低电平信号触发中断,在中断处理程序中完成对按键的响应,给出相应的显示和控制。
程序框图如右图示。
按上述方案实现的步进电机转台控制器,能够方便地输入转动角度和转动方向,在转动的同时也能准确指示转过角度和方向,取得了良好的效果。