《机械优化设计》孙靖民哈尔滨工业大学课后答案
机械优化设计习题及答案1
机械优化设计习题及参考答案1-1.简述优化设计问题数学模型的表达形式。
答:优化问题的数学模型是实际优化设计问题的数学抽象。
在明确设计变量、约束条件、目标函数之后,优化设计问题就可以表示成一般数学形式。
求设计变量向量[]12Tn x x x x =L 使 ()min f x → 且满足约束条件()0(1,2,)k h x k l ==L ()0(1,2,)j g x j m ≤=L2-1.何谓函数的梯度梯度对优化设计有何意义答:二元函数f(x 1,x 2)在x 0点处的方向导数的表达式可以改写成下面的形式:⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡∂∂∂∂=∂∂+∂∂=∂∂2cos 1cos 212cos 21cos 1θθθθxo x f x f xo x f xo x f xo d fρ令xo Tx f x f x f x fx f ⎥⎦⎤⎢⎣⎡∂∂∂∂=∂∂∂∂=∇21]21[)0(, 则称它为函数f (x 1,x 2)在x 0点处的梯度。
(1)梯度方向是函数值变化最快方向,梯度模是函数变化率的最大值。
(2)梯度与切线方向d 垂直,从而推得梯度方向为等值面的法线方向。
梯度)0(x f ∇方向为函数变化率最大方向,也就是最速上升方向。
负梯度-)0(x f ∇方向为函数变化率最小方向,即最速下降方向。
2-2.求二元函数f (x 1,x 2)=2x 12+x 22-2x 1+x 2在T x ]0,0[0=处函数变化率最大的方向和数值。
解:由于函数变化率最大的方向就是梯度的方向,这里用单位向量p 表示,函数变化率最大和数值时梯度的模)0(x f ∇。
求f (x1,x2)在x0点处的梯度方向和数值,计算如下:()⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡+-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡∂∂∂∂=∇120122214210x x x x fx f x f 2221)0(⎪⎭⎫ ⎝⎛∂∂+⎪⎭⎫ ⎝⎛∂∂=∇x f x f x f =5⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎦⎤⎢⎣⎡-=∇∇=5152512)0()0(x f x f p ϖ2-3.试求目标函数()2221212143,x x x x x x f +-=在点X 0=[1,0]T 处的最速下降方向,并求沿着该方向移动一个单位长度后新点的目标函数值。
(完整版)机械优化设计习题参考答案孙靖民第四版机械优化设计
2.黄金分割法(0.618法)
原理:提高搜索效率:1)每次只插一个值,利用一个前次的插值;2)每次的缩短率λ相同。左右对称。
程序:p52
(四)插值方法
1.抛物线法
原理:任意插3点:
算得: ; ;
要求:
设函数 用经过3点的抛物线 代替,有
解线代数方程
解得:
程序框图p57
网格法 ,缩小区间,继续搜索。
Monte Carlo方法 , ,随机数。
比较各次得到的 得解
遗传算法(专题)
(二)区间消去法(凸函数)
1.搜索区间的确定:高—低--高( )则区间内有极值。
2.区间消去法原理:在区间[a, b]内插两个点a1, b1保留有极值点区间,消去多余区间。
缩短率:
(三)0.618法
可行方向—约束允许的、函数减小的方向。(图)约束边界的切线与函数等高线的切线方向形成的区域。
数学模型
用内点法或混合法,取 ,
直接方法
(一)随机方向法
1.在可行域产生一个初始点 ,因 (约束),则
--(0,1)的随机数。
2.找k个随机方向,每个方向有n个方向余弦,要产生kn个随机数 , , ,随机方向的单位向量为
3.取一试验步长 ,计算每个方向的最优点
4.找出可行域中的最好点 得搜索方向 。以 为起点, 为搜索方向得 。最优点必须在可行域内或边界上,为此要逐步增加步长。
得
穷举下去得递推公式
3.算例
p73
4.框图p72
5.特点
作业:1. 2.
(六)变尺度法
1.引言
坐标变换
二次函数
令 为尺度变换矩阵
优化设计 孙靖民 课后答案第6章习题解答-3
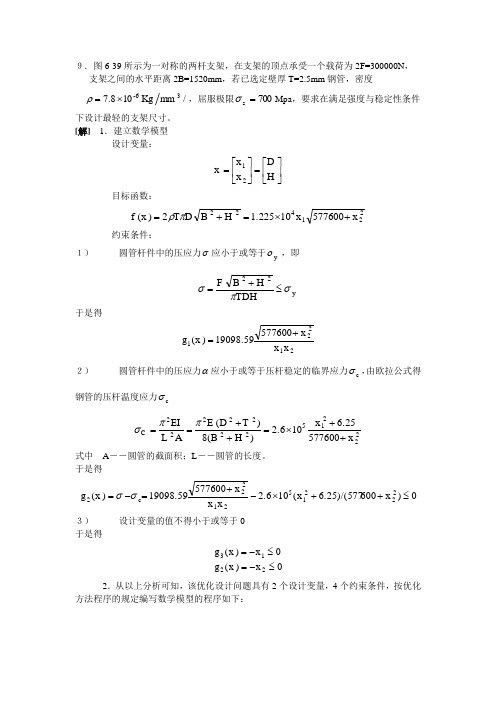
9.图6-39所示为一对称的两杆支架,在支架的顶点承受一个载荷为2F=300000N , 支架之间的水平距离2B=1520mm ,若已选定壁厚T=2.5mm 钢管,密度/1083-6mm Kg ⨯=.7ρ,屈服极限700=s σMpa ,要求在满足强度与稳定性条件下设计最轻的支架尺寸。
[解] 1.建立数学模型 设计变量:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=H D x x x 21目标函数:221422577600101.2252)(x x HB D T x f +⨯=+=πρ 约束条件: 1)圆管杆件中的压应力σ应小于或等于y ο,即y TDHHB F σπσ≤+=22于是得2122157760019098.59)(x x x x g +=2)圆管杆件中的压应力α应小于或等于压杆稳定的临界应力c σ,由欧拉公式得钢管的压杆温度应力c σ222152222225776006.25102.6)8()(x x H B T D E AL EIC ++⨯=++==ππσ2式中 A ――圆管的截面积;L ――圆管的长度。
于是得0)6006.25)/(577(102.657760019098.59)(2221521222≤++⨯-+=-=x x x x x x g c σσ3) 设计变量的值不得小于或等于0于是得)(0)(2213≤-=≤-=x x g x x g2.从以上分析可知,该优化设计问题具有2个设计变量,4个约束条件,按优化方法程序的规定编写数学模型的程序如下:subroutine ffx(n,x,fx) dimension x(n) fx=1.225e-4*x(1)*sqrt(577600.0+x(2)*x(2)) endsubroutine ggx(n,kg,x,gx) dimension x(n),gx(kg)gx(1)=19098.59*sqrt(577600.0+x(2)*x(2))/(x(1)*x(2))-700.0 gx(2)=19098.59*sqrt(577600.0+x(2)*x(2))/(x(1)*x(2))- 1 2.6e5*(x(1)*x(1)+6.25)/(577600.0+x(2)*x(2)) gx(3)=-x(1) gx(4)=-x(2) end3.利用惩罚函数法(SUMT 法)计算,得到的最优解为:============== PRIMARY DATA ============== N= 2 KG= 4 KH= 0 X : .7200000E+02 .7000000E+03 FX: .9113241E+01GX: -.3084610E+03 -.8724784E+03 -.7200000E+02 -.7000000E+03 PEN = .9132947E+01R = .1000000E+01 C = .4000000E+00 T0= .1000000E-01 EPS1= .1000000E-05 EPS2= .1000000E-05=============== OPTIMUM SOLUTION ============== IRC= 18 ITE= 39 ILI= 39 NPE= 229 NFX= 0 NGR= 57 R= .1717988E-06 PEN= .6157225E+01 X : .4868305E+02 .6988214E+03 FX: .6157187E+01GX: -.1204029E+03 -.1266042E-01 -.4868305E+02 -.6988207E+0310.图6-40所示为一箱形盖板,已知长度L=6000mm ,宽度b=600mm ,厚度mm t s 5承受最大单位载荷q=0.01Mpa ,设箱形盖板的材料为铝合金,其弹性模量MPa E 4107⨯=,泊松比3.0=μ,许用弯曲应力[]MPa 70=σ,许用剪应力[]MPa 45=τ,要求在满足强度、刚度和稳定性条件下,设计重量最轻的结构方案。
机械优化设计课后习题答案(可编辑修改word版)
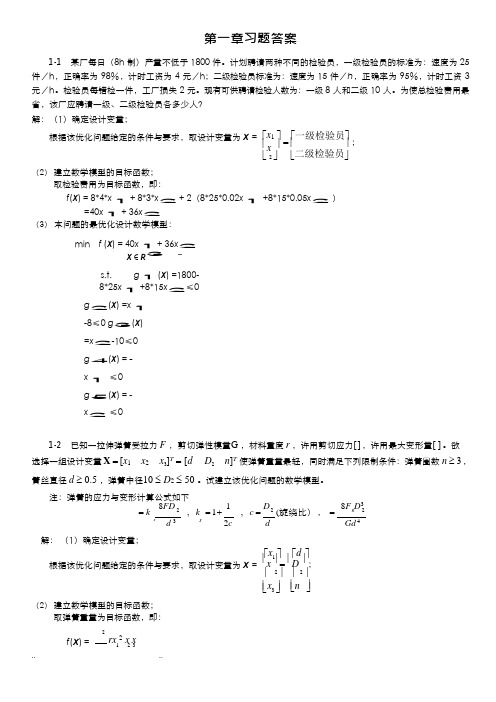
3 1 2 32第一章习题答案1-1某厂每日(8h 制)产量不低于 1800 件。
计划聘请两种不同的检验员,一级检验员的标准为:速度为 25 件/h,正确率为 98%,计时工资为 4 元/h;二级检验员标准为:速度为 15 件/h,正确率为 95%,计时工资 3 元/h。
检验员每错检一件,工厂损失 2 元。
现有可供聘请检验人数为:一级 8 人和二级 10 人。
为使总检验费用最省,该厂应聘请一级、二级检验员各多少人?解:(1)确定设计变量;根据该优化问题给定的条件与要求,取设计变量为X = ⎡x1⎤=⎡一级检验员⎤;⎢x ⎥⎢⎥(2)建立数学模型的目标函数;取检验费用为目标函数,即:⎣2 ⎦ ⎣二级检验员⎦f(X) = 8*4*x1+ 8*3*x2+ 2(8*25*0.02x1+8*15*0.05x2)=40x1+ 36x2(3)本问题的最优化设计数学模型:min f(X) = 40x1+ 36x2X∈R3·s.t. g1(X) =1800-8*25x1+8*15x2≤0g2(X) =x1-8≤0 g3(X)=x2-10≤0g4(X) = -x1≤0g5(X) = -x2≤01-2已知一拉伸弹簧受拉力F,剪切弹性模量G,材料重度r,许用剪切应力[],许用最大变形量[] 。
欲选择一组设计变量X = [x1x2x ]T= [d D n]T使弹簧重量最轻,同时满足下列限制条件:弹簧圈数n ≥ 3 ,簧丝直径d ≥ 0.5 ,弹簧中径10 ≤D2≤ 50 。
试建立该优化问题的数学模型。
注:弹簧的应力与变形计算公式如下8FD 1 D 8F D3=k 2,k=1+,c=2(旋绕比),=n2解:(1)确定设计变量;s d 3s2c d Gd 4⎡x1 ⎤⎡d ⎤根据该优化问题给定的条件与要求,取设计变量为X = ⎢x ⎥=⎢D ⎥;⎢ 2 ⎥⎢2 ⎥(2)建立数学模型的目标函数;取弹簧重量为目标函数,即:⎢⎣x3⎥⎦ ⎢⎣n ⎥⎦f(X) = 2rx 2x x1 2 34(3) 本问题的最优化设计数学模型:min f (X ) =2 rx 2 x x4X ∈R 3·1 1 8Fx 3x x 高h s.t. g 1(X ) =0.5-x 1 ≤0 g 2(X ) =10-x 2 ≤0 g 3(X )=x 2-50 ≤0g 4(X ) =3-x 3 ≤0g 5(X ) =(1+x 1 2x 2 ) 8Fx 2 - []≤0 x 3g 6(X ) = 2 3 - []≤0 Gx 41-3 某厂生产一个容积为 8000 cm 3 的平底、无盖的圆柱形容器,要求设计此容器消耗原材料最少,试写出这一优化问题的数学模型。
机械优化设计习题及答案1

机械优化设计习题及参考答案1- 1.简述优化设计问题数学模型的表达形式。
答:优化问题的数学模型是实际优化设计问题的数学抽象。
在明确设计 变量、约束条件、目标函数之后,优化设计问题就可以表示成一般数学 形式。
求设计变量向量 x - % x 2 L x n T 使 f(x)—; min且满足约束条件h k(x)=O(k=1,2,L 丨)g j (x^O (j =1,2,L m)令f(x0円呼厂!1吕T ,:x2则称它为函数f (X 1, X 2)在X 0点处的梯度。
(1) 梯度方向是函数值变化最快方向,梯度模是函数变化率的最大值。
(2) 梯度与切线方向d 垂直,从而推得梯度方向为等值面的法线方向。
梯度' f(x0)方向为函数变化率最大方向,也就是最速上升方向。
负梯度 -、f(x0)方向为函数变化率最小方向,即最速下降方向。
2- 2.求二元函数 f (X 1,X 2)=2X /+X 22-2X 1+X 2在 x ° =[0,0]T 处函数变化率最大的方向和数值。
解:由于函数变化率最大的方向就是梯度的方向,这里用单位向量 p表示,函数变化率最大和数值时梯度的模 'f(xO)。
求f (x1,x2)在2-1.何谓函数的梯度?梯度对优化设计有何意义?答:二元函数f(X 1,X 2)在X 0点处的方向导数的表达式可以改写成下面 coSM的形式:汗cd xo .x1 xo ::池 xo :fcos 叫 f f1严qI x1 ;x2 xo cos^2X0点处的梯度方向和数值,计算如下:2-3 .试求目标函数f x 1,x 2=3x ; -4x 1x 2 x |在点X =[1,0]处的最速下降方向,并求沿着该方向移动一个单位长度后新点的目标函数值。
解:求目标函数的偏导数新点是新点的目标函数值严cxl “4x1—2〕 _;-21一「2x2+1 x0 一 I 1V f x0 二 ;-21 -2 Ib 一75丄1_V5 j 、f(x0) Tf (x0)则函数在X*=[1,0] 汙:x 1=6捲 _4X 2, jf,:x 2二-4x 1 2x 2T 处的最速下降方向是■c f 1cx-1 6X 1 +4X 2〕 cf]4X r _ 2x 2_上X 2 一 *1 mx 2 =0■-61这个方向上的单位向量是:'、f (x0)P 二 一'、f(X 0)e P[-6,4]T [-3,2]丁|PJ-6)2 - 42 J3f (X 勺)=聖-2J13132- 4.何谓凸集、凸函数、凸规划?(要求配图)答:一个点集(或区域),如果连接其中任意两点x1、x2的线段都全部函数f(x)为凸集定义域内的函数,若对任何的_1及凸集域内的任意两点x1、x2,存在如下不等式:f 卜捲• 1 * ix2岂:f 洛厂i 1 - x2对于约束优化问题若f(x)、g(x)j=1,2,...,m 都是凸函数,贝U称此问题为凸规划3- 1.简述一维搜索区间消去法原理。
《机械优化设计》习题及答案1word版本
机械优化设计习题及参考答案1-1.简述优化设计问题数学模型的表达形式。
答:优化问题的数学模型是实际优化设计问题的数学抽象。
在明确设计变量、约束条件、目标函数之后,优化设计问题就可以表示成一般数学形式。
求设计变量向量[]12Tn x x x x =L 使 ()min f x → 且满足约束条件()0(1,2,)k h x k l ==L ()0(1,2,)j g x j m ≤=L2-1.何谓函数的梯度?梯度对优化设计有何意义?答:二元函数f(x 1,x 2)在x 0点处的方向导数的表达式可以改写成下面的形式:⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡∂∂∂∂=∂∂+∂∂=∂∂2cos 1cos 212cos 21cos 1θθθθxo x f x f xo x f xo x f xo d fρ令xo Tx f x f x f x fx f ⎥⎦⎤⎢⎣⎡∂∂∂∂=∂∂∂∂=∇21]21[)0(, 则称它为函数f (x 1,x 2)在x 0点处的梯度。
(1)梯度方向是函数值变化最快方向,梯度模是函数变化率的最大值。
(2)梯度与切线方向d 垂直,从而推得梯度方向为等值面的法线方向。
梯度)0(x f ∇方向为函数变化率最大方向,也就是最速上升方向。
负梯度-)0(x f ∇方向为函数变化率最小方向,即最速下降方向。
2-2.求二元函数f (x 1,x 2)=2x 12+x 22-2x 1+x 2在T x ]0,0[0=处函数变化率最大的方向和数值。
解:由于函数变化率最大的方向就是梯度的方向,这里用单位向量p表示,函数变化率最大和数值时梯度的模)0(x f ∇。
求f (x1,x2)在x0点处的梯度方向和数值,计算如下:()⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡+-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡∂∂∂∂=∇120122214210x x x x f x f x f 2221)0(⎪⎭⎫ ⎝⎛∂∂+⎪⎭⎫ ⎝⎛∂∂=∇x f x f x f =5⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎦⎤⎢⎣⎡-=∇∇=5152512)0()0(x f x f p ϖ2-3.试求目标函数()2221212143,x x x x x x f +-=在点X 0=[1,0]T 处的最速下降方向,并求沿着该方向移动一个单位长度后新点的目标函数值。
01机械优化设计第一章(哈工大—孙靖民)

哈尔滨工业大学 孙靖民 主编
2020年8月14日9时12分
课程介绍
计划学时数:26学时 使用教材
孙靖民. 机械优化设计. 北京:机械工业出版社,2003
参考书
[1]方世杰,綦耀光主编. 机械优化设计. 北京:机械工业 出版社,2003
[2] 陈立周,机械优化设计方法,北京:冶金工业出版社, 1997
Page 4
2020年8月14日9时12分
优化是万物演化的自然选择和趋势
•(1)来源:优化一语来自英文Optimization,其本意是
寻优的过程,最优化可简写为Opt;
•(2)优化过程:是寻找约束空间下给定函数取极大值或
极小值的过程。
f
例如, 在右图中,求得一维函
f(x)
数 f(x) 最小值的条件为:若
Page 13
2020年8月14日9时12分
优化设计的作用(优点):
使传统机械设计中,求解可行解上升为求解最优 解成为可能;
使传统机械设计中,性能指标的校核可以不再进 行;
使机械设计的部分评价,由定性改定量成为可能; 大大提高了产品的设计质量,从而提高了产品的
质量; 提高生产效率,降低产品开发周期; ……
3、武汉钢铁公司从德国引进的1700薄板轧机,经该公 司自主优化后,20年8月14日9时12分
4、美国波音飞机公司对大型机翼用138个设计变量进 行结构优化,使重量减少了三分之一;大型运输舰用 10个变量进行优化设计,使成本降低约10%。
实践证明,最优化设计是保证产品具有优良的性能,减轻 自重或体积,降低产品成本的一种有效设计方法。同时也可使 设计者从大量繁琐和重复的计算工作中解脱出来,使之有更多 的精力从事创造性的设计,并大大提高设计效率。
机械优化设计课程教学设计
《机械优化设计》课程教学设计(一)基本描述课程编号:S4080270课程名称:机械优化设计课程英文名称:OPTIMAL DESIGN OF MACHINE总学时:30 讲课学时:30 习题课学时:0 实验学时:0 上机学时:0 学分:2开课单位:机电工程学院机械制造及其自动化系授课对象:机电工程学院机械设计制造及其自动化专业,其它相关专业。
先修课程:高等数学理论力学材料力学机械原理机械设计机械制造装备设计高级语言程序设计。
开课时间:第七学期教材与主要参考书:孙靖民.《机械优化设计》机械工业出版社2003年6月孙全颖.《机械优化设计》哈尔滨工业大学出版社2005年(二)课程性质、研究对象及任务机械优化设计是机械类专业的专业选修课,其目的是使学生树立优化设计的思想,掌握优化设计的基本概念和基本方法,获得解决机械优化设计的初步能力,进一步提高学生的分析问题和解决问题的水平。
通过本课程的学习,培养学生具备以下几个方面的能力。
1、树立优化设计的思想,理论联系实际,具有创新设计的能力。
2、掌握机械优化设计的思想、方法和规律。
在学习优化设计基本理论的基础上,应具备数学模型的建立、优化方法的选择、软件使用、优化结果分析等方面的能力。
3、正确的运用已经学过的机械优化设计基础理论和基础知识,能够初步解决其它领域的最优化问题。
4、正确掌握本领域出现的新技术、新原理和新方法,初步具备进行机械结构优化与综合研究的能力。
机械优化设计是高等工科院校中机械设计制造及其自动化专业现代设计方法模块的一门主干课,它能够综合的运用先修课程所学到的知识与技能,在进一步加强数学基础理论知识培养的同时,重点训练学生运用数学方法解决机械设计问题的能力,为学生今后从事机械优化设计及其它相关工作打下一定的基础。
(三)教材选择分析目前全国已经编写出版的机械优化设计的教材比较多,合起来不少于十几本。
但是,综合起来讲,还是由机械工业出版社出版,由哈尔滨工业大学孙靖民教授主编的机械优化设计教材比较合适。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
dimension x(n),gx(kg)
gx(1)=x(1)*x(1)-x(2)
gx(2)=-x(1)
end
subroutine hhx(n,kh,x,hx)
domension x(n),hx(kh)
hx(1)=0.0
end
然后,利用惩罚函数法计算,即可得到如下的最优解:
============== PRIMARY DATA ==============
的可行方向。
[解] 按公式 6-32 d k = −P∇f (x k ) / P∇f (x k ) 计算适用的可行方向:
x k 点的目标函数梯度为: ∇f (x k ) = [− 0.5 1]T
x k 点处起作用约束的梯度 G 为一个 n ⋅ J 阶的矩阵,题中:n=2,J=1:
G = ∇g1(x k ) = [− 1 −1]T
FX: -.1000000E+01
GX: -.6931472E+00 -.2000000E+01 -.1000000E+01
第 4 题答案:
[ ] [ ] 取 x0
=
1 1
时, x2
=1 25
99 48.5
, f (x2 ) = −7.996 。
第 5 题答案: 可参考表 4-1。
第五章 第 1 题答案:
x* = [4 0 0 0.333]T 时, ∑ f (x*) = c j x j = −5.567 。
第 2 题答案:
x
=
⎡1⎤ ⎢⎣3⎥⎦
。
第六章习题解答
1.已知约束优化问题:
s ⋅t
min f (x ) = (x 1 − 2)2 + (x 2 − 1)2
g1(x
)
=
x
2 1
−
x2
≤
0
g2(x ) = x1 + x 2 − 2 ≤ 0
试从第 k 次的迭代点 x (k ) = [− 1 2]T 出发,沿由(-1 1)区间的随机数 0.562 和-0.254
5)计算新的复合形中,去掉最坏点后的中心点得:
x
1 c
=
1 2
⎜⎜⎝⎛
⎡3⎤ ⎢⎣3⎥⎦
+
⎡0.55⎤ ⎢⎣3.3 ⎥⎦
⎟⎟⎠⎞
=
⎡1.775⎤ ⎢⎣3.15 ⎥⎦
6)计算新一轮迭代的反射点得:
x
2 R
=
x
1 c
+ α (x
1 c
−
x
0 1
)
=
⎡1.775⎤
⎢⎣3.15
⎥ ⎦
+
1.3⎜⎜⎝⎛
⎡1.775⎤
ln[gu
(x
)]
=
x
2 1
+
x
2 2
−
2x 1
+1−
r
ln(3
−
x
2)
u =1
令惩罚函数对 x 的极值等于零:
dφ dx
=
⎡2x ⎢⎣2x
1 2
−2 − (−
r
)
/(3
−x
⎤ 2)⎥⎦
=
0
x1 =1
得:
x2 = 6±
36 + 8r 4
舍去负根后,得 x 2 = 6 +
36 + 8r 4
当 r → 0 时,x 2 → 3,该问题的最优解为 x = [1 3]T 。
2)计算去掉最坏点
x
0 2
后的复合形的中心点:
∑ x
0 c
=
1 L
3 i =1
x
0 i
=
1 2
⎜⎜⎝⎛
⎡2⎤ ⎢⎣1 ⎥⎦
+
⎡3⎤ ⎢⎣3⎥⎦
⎟⎟⎠⎞
=
⎡2.5⎤ ⎢⎣ 2 ⎥⎦
+
⎡3⎤ ⎢⎣3⎥⎦
i ≠2
3)计算反射点
x
1 R
(取反射系数α = 1.3 )
x
1 R
=
x
0 c
+ α (x
0 c
−
x
0 2
=
⎡0.822⎤ ⎢⎣1.176⎥⎦
第 2 题答案:
xR2
=
⎡1.4825⎤
⎢⎣5.945
⎥ ⎦
,
f
1 R
= −41.43 。
第 3 题答案:
dk
=
⎡0.707⎤ ⎢⎣0.707⎥⎦
第 4 题答案:
⎡0 ⎤ d k = ⎢⎢0.243⎥⎥
⎢⎣0.97 ⎥⎦
第 5 题答案:
当r
→
0
时,
x2
→
3 ,该问题的最优解为:
即:
X
k +1
=
⎡0.822⎤
⎢⎣1.176
⎥ ⎦
该约束优化问题的目标函数的等值线、可行域和本次迭代的搜索路线如下图所示。
2.已知约束优化问题:
s ⋅t
min
f
(x
)
=
4x 1
−
x
2 2
− 12
g1(x
)
=
x
2 1
+
x
2 2
−
25
≤
0
g2(x ) = −x1 ≤ 0
g3(x ) = −x 2 ≤ 0
⎡0.5 − 0.5⎤⎡− 0.5⎤ ⎢⎣− 0.5 0.5⎥⎦⎢⎣ 1 ⎥⎦
=
⎡− 0.707⎤ ⎢⎣ 0.707 ⎥⎦
4.已知约束优化问题:
s ⋅t
min
f
(x
)
=
4 3
(
x
2 1
−
x 1x
2
+
x
2 2
)( 3 4)
−
x
3
g1 = −x 1 ≤ 0
g2 = −x 2 ≤ 0
g3 = −x 3 ≤ 0
⎢⎣3.15
⎥ ⎦
−
⎡2⎤
⎢⎣1
⎥ ⎦
⎟⎟⎠⎞
=
⎡1.4825⎤
⎢⎣5.945
⎥ ⎦
经判断x
2 R
为可行点,其目标函数值f
1 R
=
−41.413,完成第二次迭代。
3.设 已 知 在 二 维 空 间 中 的 点 x = [x 1 x 2 ]T , 并 已 知 该 点 的 适 时 约 束 的 梯 度 ∇g = [− 1 − 1]T ,目标函数的梯度 ∇f = [− 0.5 1]T ,试用简化方法确定一个适用
5.用内点法求下列问题的最优解:
min f
(x
)
=
x
2 1
+
x
2 2
−
2x 1
+1
s ⋅t
g1 = 3 − x 2 ≤ 0
2
∑ (提示:可构造惩罚函数 φ(x , r ) = f (x ) − r ln[gu (x )],然后用解析法求解。) u =1
[解] 构造内点惩罚函数:
2
∑ φ(x , r ) = f (x ) − r
2) 用公式: x (k +1) = x (k ) + αS R 计算新的迭代点。步长α取为搜索到约束边界
上的最大步长。到第二个约束边界上的步长可取为 2,则:
x
k +1
=
x
k 1
+ αS R 1
=
−1 + 2 × 0.911 = 0.822
x
k 2
+1
=
x
k 2
+ αS R 2
= 2 + 2 × (−0.412) = 1.176
R= .1048577E-13 PEN= .4229850E-06 X : .9493056E-07 .7203758E-07 FX: .1669681E-06 GX: -.7203757E-07 -.9493056E-07
7.用混合惩罚函数法求下列问题的最优解:
min f (x ) = x 2 − x 1
梯度投影矩阵 P 为:
[ ] P = I
−G
GTG
−1
G
T
=
⎡1 ⎢⎣0
0⎤ 1⎥⎦
−
⎢⎣⎡−− 11⎥⎦⎤⎜⎜⎝⎛ [−
1
−
1]⎢⎣⎡−−
1⎤ 1⎥⎦
⎟⎟⎠⎞
−1
[−
1
01]
=
⎡0.5 − ⎢⎣− 0.5
0.5⎤ 0.5⎥⎦
则:适用可行方向为:
d
k
=
−
⎡0.5 − ⎢⎣− 0.5
0.5⎤⎡− 0.5⎤ 0.5⎥⎦⎢⎣ 1 ⎥⎦
PEN = .5000000E+01
R = .1000000E+01
C = .2000000E+00 T0= .1000000E-01
EPS1= .1000000E-05 EPS2= .1000000E-05
=============== OPTIMUM SOLUTION ============== IRC= 21 ITE= 54 ILI= 117 NPE= 3759 NFX= 0 NGR= 0
第四章
第 1 题答案:
[ ] [ ] 当取初始点 x0 =
3 0
时, x2 =
1.11 0.56
, f (x2 ) = 0.63 。
第 2 题答案:
[ ] [ ] 取 x0 =
3 0
时, x2 =
1.57 0.97
, f (x2 ) = 0.17 。