开关磁阻电机双闭环控制系统设计
双闭环控制器设计方法
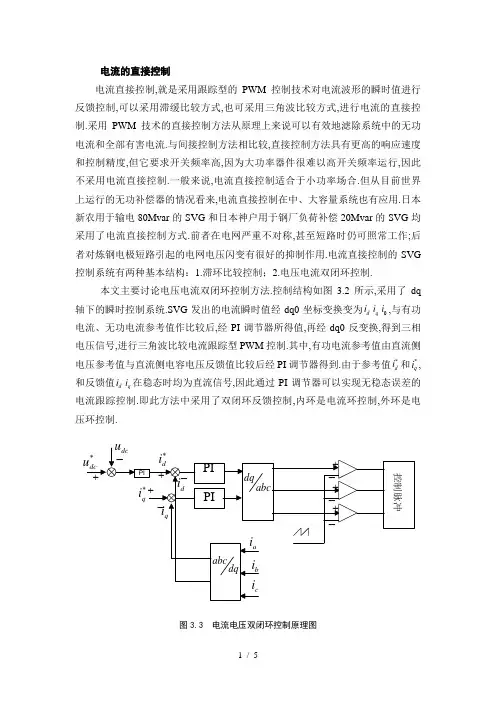
电流的直接控制电流直接控制,就是采用跟踪型的PWM 控制技术对电流波形的瞬时值进行反馈控制,可以采用滞缓比较方式,也可采用三角波比较方式,进行电流的直接控制.采用PWM 技术的直接控制方法从原理上来说可以有效地滤除系统中的无功电流和全部有害电流.与间接控制方法相比较,直接控制方法具有更高的响应速度和控制精度,但它要求开关频率高,因为大功率器件很难以高开关频率运行,因此不采用电流直接控制.一般来说,电流直接控制适合于小功率场合.但从目前世界上运行的无功补偿器的情况看来,电流直接控制在中、大容量系统也有应用.日本新农用于输电80Mvar 的SVG 和日本神户用于钢厂负荷补偿20Mvar 的SVG 均采用了电流直接控制方式.前者在电网严重不对称,甚至短路时仍可照常工作;后者对炼钢电极短路引起的电网电压闪变有很好的抑制作用.电流直接控制的SVG 控制系统有两种基本结构:1.滞环比较控制;2.电压电流双闭环控制.本文主要讨论电压电流双闭环控制方法.控制结构如图3.2所示,采用了dq 轴下的瞬时控制系统.SVG 发出的电流瞬时值经dq0坐标变换变为d i q i 0i ,与有功电流、无功电流参考值作比较后,经PI 调节器所得值,再经dq0反变换,得到三相电压信号,进行三角波比较电流跟踪型PWM 控制.其中,有功电流参考值由直流侧电压参考值与直流侧电容电压反馈值比较后经PI 调节器得到.由于参考值*d i 和*q i ,和反馈值d i q i 在稳态时均为直流信号,因此通过PI 调节器可以实现无稳态误差的电流跟踪控制.即此方法中采用了双闭环反馈控制,内环是电流环控制,外环是电压环控制.图3.3 电流电压双闭环控制原理图SVG 采用电流直接控制后,其响应速度和控制精度将比间接控制法有很大提高.在这种控制方法下,SVG 实际上相当于一个受控电流源.由于受电力半导体器件开关频率限制,这种控制方法对较小容量SVG 比较适用.还有一种电流直接控制方法为空间矢量调制控制方法,其原理可参考相关文献,本文不再给出.以上介绍了SVG 的两类控制方法,电流的间接控制和电流的直接控制.通过对比我们可以得出如下结论:<1>电流的间接控制方法相对简单,技术相对成熟,但间接控制与直接控制相比,控制精度较低,电流响应速度较慢.<2>电流直接控制法对电力半导体器件的开关频率要求高,因此适用于较小容量SVG 控制;间接控制法适用于较大容量的SVG 控制.<3>采用电流间接控制的大容量SVG 可采用多个变流器多重化联结、多电平技术或PWM 控制技术来减小谐波.而采用电流PWM 跟踪控制的直接控制方法电流谐波较少.3.3 控制系统参数计算将双闭环控制器设计方法用于SVG,只需要经过为数不多的几步简单计算,就可以确定控制器的参数,特别适合控制器参数的现场整定.另一特点是在频域设计控制器时,可以比较方便地将系统中诸如变换器延时,滤波延时等小滞后环节考虑进去.因此,在SVG 控制系统设计中,一般采用双环控制,即电压外环和电流内环.电压外环的作用主要是控制三相PWM 整流器直流侧电压,而电流内环的作用是要按电压外环输出的电流指令进行电流控制.电流内环控制系统设计如图2.2所示,在相坐标系VSR<d,q>中,其dq 模型可描述为:d d d q q de i u Lp R L e i L Lp R u ωω⎡⎤⎡⎤+-⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥+⎣⎦⎣⎦⎣⎦⎣⎦ <3.5> ()32d d q q dc dc u i u i u i += <3.6> 式中d e 、q e ——电网电动势矢量dq E 的d 、q 分量d u 、q u ——三相VSR 交流侧电压矢量dq U 的d 、q 分量d i 、q i ——三相VSR 交流侧电流矢量dq I 的d 、q 分量P ——微分算子设dq 坐标系中q 轴与电网电动势矢量dq E 重合,则电网电动势矢量d 轴分量d e =0.从三相VSR dq 模型方程式<3.5>可看出,由于VSR d 、q 轴变量相互耦合,因而给控制器设计造成一定困难.为此,可采用前馈解耦控制策略,当电流调节器采用PI 调节器时,则d u 、q u 的控制方程如下:()iI q ip q q d q K u K i i Li e s ω**⎛⎫=-+--+ ⎪⎝⎭ 〔3.7〕()iI d ip d d q d K u K i i Li e s ω**⎛⎫=-+-++ ⎪⎝⎭〔3.8〕式中 ip K 、iI K ——电流内环比例调节增益和积分调节增益;q i *、d i *——q i 、d i 电流指令值;将式〔3.7〕〔3.8〕代入式〔3.6〕,并化简得:10iI ip d d d iI ip q q q iI ipK R K s i i i K L p K i i L s i K R K s L**⎡⎤⎡⎤⎛⎫-+⎢⎥⎢⎥ ⎪⎝⎭⎣⎦⎢⎥-⎡⎤⎡⎤⎡⎤⎛⎫⎢⎥=-+⎢⎥⎢⎥⎢⎥ ⎪⎢⎥⎡⎤⎝⎭⎛⎫⎢⎥⎣⎦⎣⎦⎣⎦-+⎢⎥⎢⎥ ⎪⎝⎭⎣⎦⎢⎥-⎣⎦〔3.9〕 显然式<3.9>表明:前馈的控制算法式<3.7>和<3.8>使三相VSR 电流内环()d q i i 实现了解耦控制,由于两电流内环的对称性,因而下面以q i 控制为例讨论电流调节器的设计.考虑电流内环信号采样的延迟和PWM 控制的小惯性特性,已解耦的q i 电流内环结构如图3.4所示:图3.4 无q e 扰动时的q i 电流内环简化结构图3.4中,s T 为电流内环电流采样周期〔即亦为PWM 开关周期〕,PWM K 为桥路PWM 等效增益.为简化分析将PI 调节器的传递函数写成零点形式,即:1ip iI i ip ip iI i iK K s K K K s s τττ+⨯==<3.10> 将小时间常数2sT 、s T合并.电流调节器设计方案有两种.当考虑电流内环需获得较快的电流跟随性能时,可按典型I 型系统设计电流调节器,从图3.4可看出,只需以PI 调节器零点抵消电流控制对象传递函数的极点即可,即i L Rτ=.校正后,电流内环的开环传递函数为:()()1.51ip PWM oi i s K K W s R s T τ=+ <3.11>由典型I 型系统参数整定关系,当取系统阻尼比ξ=0.707时,有:1.512s ip PWMiT K K R τ=<3.12> 求解得:3iip s PWMR K T K τ=〔3.13〕3ipiI is PWMK RK T K τ==〔3.14〕式〔3.13〕〔3.14〕即为电流内环PI 调节器控制参数计算公式.外环控制系统的设计由于电压外环的主要控制作用是稳定三相VSR 直流电压,故其控制系统整定时,应着重考虑电压环的抗扰性能.显然,可按典型∏型系统设计电压调节器,电压环的简化控制结构由图3.5所示:图3.5 三相VSR 电压环简化结构得电压环开环传递函数为:()()()20.7511u u ou u eu K T s W s CT s T s +=+ <3.15>由此,得电压环中频宽u h 为:uu euT h T =〔3.16〕 由典型∏型系统控制器参数整定关系得:220.7512u u u u euK h CT h T += 〔3.17〕 综合考虑电压环控制系统的抗扰性与跟随性,工程上一般取中频宽5uu euT h T ==,将5u h =代入〔3.17〕,计算得电压环PI 调节器参数为:()()55343u eu u s u u s T T T C K T ττ⎧==+⎪⎨=⎪+⎩〔3.18〕 另一方面,当采用典型∏型系统设计电压环时,电压环控制系统截止频率c ω为:1112c u eu T T ω⎛⎫=+⎪⎝⎭〔3.19〕 当取u s T τ=时,()5320u u eu u s s T h T T T τ==+= 〔3.20〕 将式〔3.20〕代入式〔3.19〕得:1113220420c s s s T T T ω⎛⎫=+=⎪⎝⎭〔3.21〕 则电压环控制系统频带宽度bv f 为:30.0242202c bv s s f f T ωππ≈=≈⨯ 〔3.22〕 式中s f ——PWM 开关频率.。
开关磁阻电机控制系统设计与仿真
开关磁阻电机控制系统设计与仿真范盼飞;张团善;杨斌;王国庆;何文莉【摘要】In order to improve the speed-governing performance of the switched reluctance motor at different speeds and reduce the torque ripple,a control system of switched reluctance motor is designed.A high-performance DSP (TMS570LS1227) being used as the main controlchip,magnetic encoder AS5040 measures the rotor position,the gate driver IR2130 receives six-way PWM waves and controls IBGT tube off and on.The current tracking control is adopted at low speed,and the phase voltage PWM chopping control at medium and high speed.Under theMatlab/Simulink environment the linear system model is simulated,and a real machine debugging conducted with a switched reluctancemotor,which proves the system runs smoothly with a high-speed performance,and can also effectively inhibit torque ripple and noise of the switched reluctance motor.%为了提高开关磁阻电机(Switched Reluctance Motor)在不同速度运转时的调速性能,降低转矩脉动,设计了一款开关磁阻电机控制系统.控制系统采用高性能DSP(TMS570LS1227)作为主控芯片,磁编码器AS5040测定转子位置,门极驱动器IR2130接收六路PWM波控制IBGT管的通断.低速运行时采用电流跟踪控制,中、高速时采用相电压PWM斩波控制,在Matlab/Simulink环境下对系统线性模型进行了仿真,并对一台开关磁阻电机进行实机调试.测试结果证明所设计系统运行平稳,调速性能优良,能有效地抑制开关磁阻电机的转矩脉动和噪声.【期刊名称】《西安工程大学学报》【年(卷),期】2017(031)001【总页数】7页(P88-94)【关键词】开关磁阻电机;电流跟踪控制;电压斩波【作者】范盼飞;张团善;杨斌;王国庆;何文莉【作者单位】西安工程大学机电工程学院,陕西西安710048;西安工程大学机电工程学院,陕西西安710048;西安工程大学机电工程学院,陕西西安710048;西安工程大学机电工程学院,陕西西安710048;西安工程大学机电工程学院,陕西西安710048【正文语种】中文【中图分类】TM352;TM301.2开关磁阻电机双凸极的结构以及它的开关性(电机工作在连续的开关供电模式),决定了开关磁阻电机具有一定的固有转矩脉动,无法平稳运行,工作在低速时还伴有较大的电磁噪声,根据SRM的可控量及调速性能,在不同的速度段运行时具有角度位置控制、电流斩波、电压斩波等不同方式[1-3].目前有许多学者对SRM的控制系统做了研究,文献[4]依据开通角和关断角随电机转速变化而改变的原理设计了基于DSPACE开发平台的控制系统,虽然缩短了开发周期,但是电流峰值由旋转电动势限制,低速时该电动势减小,电流等值会超标,其他控制手段进行限流;文献[5]提出一种DTC策略下的转矩双滞环控制器,通过判断开关磁阻电机启动转矩偏差,选择空间矢量,该方法只适合于开关磁阻电机在启动阶段的控制,无法完整解决开关磁阻电机的转矩脉动问题;文献[6]和文献[7]分别采用电流双闭环和优化开关角的方法抑制转矩脉动,然而在电机换相控制时瞬间电流过大,产生负转矩,导致转矩脉动;文献[8]提出一种将上上一周期偏差和当前周期叠加到被控对象进行控制的方法,对具有周期性扰动的SRM系统有良好效果,但是抗负载扰动动态性能较差.本文在研究开关磁阻电机的调速特性,建立数学模型之后,采用高性能DSP(TMS570LS1227)作为主控芯片,以速度作为外环,电流控制为内环,电机在低速运行时采用间接转矩控制,对相电流进行跟踪控制,在中、高速运行时采用电压PWM斩波控制,并设计了开关磁阻电机的硬件驱动电路和软件控制程序,有效地改善了开关磁阻电机运行时的转矩脉动,提高了电机转速控制精度.根据机电关系方程式,有在线性模型中简化方程根据式(2)和(3)得以上各式中Te为转矩;θ为转子角位置;ik为k相绕组的相电流;Wm为磁储能;Ψ为相绕组的磁链;L为绕组电感.由式(4)可知,开关磁阻电机的矩角特性,当dL/dθ≥0时,由于转角的增大,电机电感上升,产生正转矩,当dL/dθ≤0时,产生一个负转矩,因此可以通过控制相绕组电流的通断,改变转矩方向[10-12].由此可知,SRM的每一相的转矩特性可以用转矩——电流——角度来描述,相邻两相相差一个步矩角,当转矩达到最大时开始降落,最大的转矩降落出现在相邻两相的矩角特性曲线重叠处,此时正是开关磁阻电机换相的瞬间,当前相不再产生电磁转矩,下一个导通相不能产生所需转矩,该转矩降落大时转矩脉动大.因此选用合适的控制技术,减小开关磁阻电机相邻两相绕组之间的最大转矩降落,可以有效地抑制转矩脉动[13-15].当SRM工作在低速时,相绕组中旋转电动势减小,相反相电流增长迅速,此时电机处于恒转矩状态,适用相电流斩波的控制方式,即跟踪相电流的控制方法,可以有效地限制相电流超过允许值,当SRM工作在中高速时,随着电机角速度增大,磁链和相电流减小迅速,转矩Te以平方下降,电机处于恒功率状态,此时采用PWM电压斩波的控制方式可以调节相绕组电压平均值,间接限制相电流,抗负载扰动动态性能更加优良[16-20].由开关磁阻电机的控制机理可知,控制相绕组电流或磁链大小可以间接完成转矩控制.本文采用TMS570LS1227作为控制芯片设计了开关磁阻电机的电流和转速的双闭环控制系统,如图1所示.速度控制器输入为SRM的给定转速与反馈速度的比较值,经过PI控制器处理,输出量为给定转矩Tref,经由转矩控制器的转矩分配函数处理,得出各相的参考电流,与各相绕组的反馈相电流比较运算,用PWM控制方式产生功率器件的开关信号.2.1 硬件设计2.1.1 磁编码器通信模块 SRM角度信号的采集采用非接触式磁旋转编码器AS5040.图2所示为磁编码器与单片机通信的硬件电路,AS5040通过串行输出接口与TMS570LS1227的SPI进行同步通信,AS5040输出最大值为1024的电角度值,对应角度信息为360°机械角度,角度信息将被用来完成开关磁阻电机的换相控制与速度测算,需要注意的是磁编码器输出信号为8位电角度信息加3位磁场信息,需要进行移位处理以保证准确性.2.1.2 驱动控制模块 SRM的驱动采用电压斩波(CVC)的方式.如图3所示,通过向高性能门集驱动器IR2130输入六路PWM波,可以使IGBT管工作在脉宽调制方式,脉冲周期固定,改变PWM波的占空比,可以调节绕组两端的电压平均值,间接改变绕组电流从而完成转速控制,此种方式适用于高低速运行,且抗扰动响应快.此外,IR2130的ITRIP、CA-、CAO引脚组成过流、欠压检测电路,系统欠电压时,因为功率器件达不到工作所需电压,会导致输出信号错乱,而过电流时,主回路或定子绕组电流超过允许值,会烧坏功率开关管,当检测到过流或欠压信号时,可以封锁输出,保护IGBT因驱动信号幅值不足或过流而损坏.2.1.3 电流检测模块三相开关磁阻电机控制系统需要3个电流传感器分别检测相电流及母线电流,图4所示为U相电流采集电路,电流传感器采用ACS756,有正电压输入、负电压输入、输出信号、电源电压和地5个端口,因为经过ACS756输出的采样电流信号为按比例缩小的电压信号,需要使用运算放大电路及滤波电路处理,防止后续电路对其产生干扰.如图4所示,运算放大电路设计为电压跟随电路使信号电压保持不变,为了消除采集电流信号的毛刺,添加了二阶低通滤波器,同时为防止采集到的信号电压过高损坏DSP,在电流信号进入DSP采样模块之前添加了3.3V钳位电路.2.2 软件设计该系统采用C语言编制完成,用来控制开关磁阻电机的转速闭环和电流闭环控制,主程序设计框图如图5所示.主程序主要由初始化程序和运行程序两大模块组成,在初始化程序完成DSP系统和SRM速度、位置等参数的初始化之后,进入无限循环的运行程序,在较低的优先级完成SRM速度测量及LED可视化输出.需要注意的是速度测量为双精度数据计算,在后台执行.SRM运行中的电流控制、位置检测、速度控制均在定时中断服务程序中进行,电机控制频率为换相控制和速度控制频率的5倍.采样中断程序由外部中断完成,频率由SRM的运行速度决定,转速越高,采样中断频率越高.为了验证所设计系统的性能,在Matlab/Simulink环境下,在不计算SRM相绕组的磁滞、涡流及互感利用模块库的条件下,建立了控制系统的线性仿真模型进行仿真实验.系统由SRM主体模块、电流控制模块、转速控制模块、转矩计算模块转角选择模块等部分组成,其中主体模块选用三相6极SRM电机,输入量为电机转速,输出量为各相电流,转速环由PI调节器构成电流环为PWM电压斩波控制器和相电流斩波控制器复合组成,电压PWM斩波频率为8kHz,母线电压220V,θon和θoff固定为10°和22°,PI调节参数KP=3.2,KI=0.6.图6为PWM波形、相电压、相电流、合成转矩的仿真图像,结果表明所设计控制系统各项指标都在合格范围,电磁转矩平稳,调速性能优良,可以有效地减小开关磁阻电机运行时的转矩脉动.本文开关磁阻电机控制系统选用TMS570LS1227为主控芯片采用低速相电流追踪控制,中、高速PWM电压斩波的控制策略,所设计控制系统可以有效抑制转矩脉动,系统精度高,硬件、软件系统运行可靠,具有使用价值.E-mail:****************FAN Panfei,ZHANG Tuanshan,YANG Bin,et al.Design and simulation of switched reluctance motor control system[J].Journal of Xi′an Polytechnic University,2016,31(1):88-94.【相关文献】[1] 吴红星.开关磁阻电机系统理论与控制技术[M].北京:中国电力出版社2010:124-151.WU Hongxing.Switched reluctance motor system theory and controltechnology[M].Beijing:China Electric Power Press,2010:124-151.[2] 袁驰,范岩.基于DSP的开关磁阻电机控制系统设计[J].电力电子技术,2009,43(2):27-28. YUAN Chi,FAN Yan.Design of SRM control system based on DSP[J].Power Electronics,2009,43(2):27-28.[3] 谢方南,朱莉莉,刘俊纯.基于MCF5213的开关磁阻电机控制系统设计[J].电机与控制应用,2011,38(3):23-27.XIE Fangnan,ZHU Lili,LIU Junchun.Design of switched reluctance motor contro-l system based on MCF5213[J].Motor and Control Applications,2011,38(3):23-27.[4] 李军伟,葛金龙,邱今胜.基于快速原型的开关磁阻电机控制系统开发[J].微电机,2015,43(8):75-78. LI Junwei,GE Jinlong,QIU Jinsheng.Development of switched reluctance motor control system based on rapid control prototyping[J].Micro Motor,2015,43(8):75-78.[5] 林诚才,张月玲,肖逢.基于DTC的开关磁阻电机平稳起动的研究[J].计算机仿真,2015,32(9):180-184.LIN Chengcai,ZHANG Yueling,XIAO Feng.Research on smooth start for switchedreluctance motor based on DTC[J].Computer Simulation,2015,32(9):180-184.[6] 王维平,张磊,朱敏.起动/发电/助力减振一体化系统用开关磁阻电机启动转矩控制研究[J].微电机,2009,42(12):87-89.WANG Weiping,ZHANG Lei,ZHU Min.Research torque control strategy of switched reluctance motor ISAD[J].Computer Simulation,2009,42(12):87-89.[7] 刘勇智,陈杰,盛增津,等.开关磁阻电机启动转矩控制策略研究[J].电气传动,2014,44(7):12-15. LIU Yongzhi,CHEN Jie,SHENG Zengjin,et al.Research on starting torque control strategy of switched reluctance motor[J].Electrical Driver,2014,44(7):12-15.[8] 刘作军,常硕,董砚,等.重复控制的开关磁阻电机转矩脉动抑制策略[J].微电机,2013,46(5):44-47. LIU Zuojun,CHANG Shuo,DONG Yan,et al.Repetitive control based torque ripple reduction strategy for SRM[J].Micro Motor,2013,46(5):44-47.[9] 蒯松岩,吴涛,代尚方,等.基于RBF的无位置开关磁阻电机控制系统[J].电力电子技术,2011,45(7):52-54.KUAI Songyanl,WU Tao,DAI Shangfang,et al.Position sensorless control system of switched reluctance motor based on RBF[J].Power Electronics Technology,2011,45(7):52-54.[10] 崔晓锃,石山,刘志东.基于论域自调整的模糊PID开关磁阻电机控制系统研究[J].微电机,2012,45(2):75-77.CUI Xiaozeng,SHI Shan,LIU Zhidong.Fuzzy PID control system based on adapt-ive universe for switched reluctance motors[J].Micro Motor,2012,45(2):75-77.[11] 周芸,杨红.一种减少开关磁阻电机转矩脉动的算法[J].计算机仿真,2014,31(9):360-362. ZHOU Yun,YANG Hong.An algorithm to reduce torque ripple of switched eluctance motor[J].Computer Simulation,2014,31(9):360-362.[12] 康梅,吉敬华,赵文祥.矿用开关磁阻电机的转矩脉动优化控制[J].煤矿机械,2013,34(4):92-93. KANG Mei,JI Jinghua,ZHAO Wenxiang.Optimal torque ripple minimized control for switched reluctance motor for mining applications[J].Coal Mine Machinery,2013,34(4):92-93.[13] 刘新江.开关磁阻电机转矩估计和预测控制[D].成都:电子科技大学,2014:14-25.LIU Xinjiang.Torque estimation and predictive control of switched reluctancemotor[D].Chengdu:University of Electronic Science and Technology of China,2014:14-25.[14] 宋受俊,葛乐飞,刘虎成,等.开关磁阻电机设计及多目标优化方法[J].电工技术学报,2014,29(5):197-200.SONG Shoujnil,Ge Lefei, LIU Hucheng,et al.Design and multi-objective optimization method of switched reluctance machines[J].Transactions of China Electrotechnical Society,2014,29(5):197-200.[15] 陈鹏.开关磁阻电机控制系统的研究与实现[D].南京:东南大学,2014:37-41.CHEN Peng.Study and implementation of switched reluctance motor controlsystem[D].Nanjing:Southeast University,2014:37-41.[16] 徐宇柘,曹彦萍,钟锐,等.基于LSSVM的开关磁阻电机转子位置估算[J].东南大学学报,2013,43(2):307-311.XU Yuzhe,CAO Yanping,ZHONG Rui,et al.Rotor position estimation of switched reluctance motor based on LSSVM[J].Journal of Southeast University,2013,43(2):307-311.[18] 杨晋岭,张英俊,谢斌红.一种新型开关磁阻电机软开关功率电路[J].煤炭学报,2014,39(1):179-185.YANG Jinling,ZHANG Yingjun,XIE Binhong.A new SRM soft switchingpowercircuit[J].Journal of China Coal Society,2014,39(1):179-185.[19] 李睿,马智远,徐德鸿.一种新型 40 kW 软开关三相脉宽调制整流器[J].中国电机工程学报,2011,31(33):93-100.LI Rui,MA Zhiyuan,XU Dehong.A novel 40 kW soft switching three-phase pulsewidth modulation rectifier[J].Proceedings of the CSEE,2011,31(33):93-100.[20] MUHAMMAD Rafiq,REHMAN Saeed-ur,REHMAN Fazal-ur,et al.A second ordersliding mode control design of a switched reluctance motor using super twistingalgorithm[J].Simulation Modelling Practice and Theory,2012,25:106-117.。
2_2kW开关磁阻电机驱动系统的设计
《中小型电机 》2005, 32 (2)
2. 2kW 开关磁阻电机驱动系统的设计
29
用增量式数字 P ID 控制方式 ,电流环采用滞环比 较控制方式 ,它们都通过软件实现 。只要直接软 件修改 P ID 参数和滞环宽度 ,而不需要对外部硬 件电路做修改 ,就可以实现对双闭环系统控制参 数的修改 ,使得控制更加灵活 。
(CPLD )构成了控制器的中枢 。DSP综合处理速 度指令 、速度反馈信号 、电流传感器 、电压传感器 及位置传感器的信息 ,控制功率变换器的开关器 件的工作状态 ,实现对 SRM 运行状态的控制 。而 采用 CPLD 能完成较复杂的逻辑运算 ,并且提供 输入 、输出缓冲器和扩展 I/O 口等功能 ,它很适合
《中小型电机 》2005, 32 (2)
2. 2kW 开关磁阻电机驱动系统的设计
27
2. 2kW 开关磁阻电机驱动系统的设计
叶华峰 , 王双红 , 詹琼华 (华中科技大学 ,湖北 武汉 430074)
摘要 本文介绍了以数字信号处理器 (DSP)和可逻辑编程器件 (CPLD )为 控制核心的三相 12 /8极开关磁阻电机调速系统 ( SRD ) ,提出了一种新型的适用 于三相 12 /8极 SRM 的绕组分路并联运行方案 ,同时介绍了控制器的软硬件设 计过程和实验结果 。 关键词 开关磁阻电机 功率变换器 控制器 DSP CPLD
ቤተ መጻሕፍቲ ባይዱ
图 3 控制器硬件图
控制器中 ,选用 TM S320F240X 系列 DSP,该 系列 DSP专用于电机数字控制 ,它集成了电机控 制的外围器件 ,设计时只需要外加较少的硬件设 备 , 从 而 降 低 系 统 的 硬 件 成 本 。同 时 选 用 MAX7000S系列的 CPLD ,不仅使设计的产品达到 小型化 、集成化和高可靠性 ,大大缩短了设计周 期 ,减少了设计费用 ,而且 CPLD 还具有在系统编 程 ( In2System p rogrammable,简称 ISP)能力 ,使控 制系统的设计 、开发 、更新与维护变得非常方便 。
双闭环直流电机调速系统设计
双闭环直流电机调速系统设计嘿,大家好!今天咱们聊聊一个挺酷的话题:双闭环直流电机调速系统。
虽然听起来有点像外星人的科技,但是其实它就是咱们日常生活中的一些电机背后的“聪明脑袋”。
没错,电动工具、电动汽车,甚至是你家那台洗衣机,都可能用到这种技术。
别担心,我会用简单易懂的语言,把这个“高大上”的话题聊得通俗易懂,让你像喝水一样轻松明白。
1. 什么是双闭环系统?首先,咱们得搞清楚什么是双闭环系统。
你可以把它想象成一辆高科技的赛车。
车上有两个智能系统,一个负责控制车速,另一个负责检查车速是不是正好。
第一个环节,叫做“速度闭环”,就像是车里的加速器,它根据你给的油门信号来调整速度。
第二个环节,叫做“电流闭环”,就是车上的仪表盘,它会实时监控实际速度和预定速度的差异,确保车速始终如你所愿。
两个环节相互配合,就像是赛车手的左右手,协作得天衣无缝。
1.1 速度闭环的作用速度闭环系统,简单来说,就是确保电机转得刚刚好。
你可以把它想成是你的车速表,告诉你车速到底快不快。
当你设定了目标速度后,速度闭环就会一直“盯着”电机的实际速度,看是不是达到了你想要的。
要是电机转得快了或者慢了,速度闭环会发出“警报”,让电机调整到正确的速度。
就像你开车的时候,如果超速了,车上的警报器就会提醒你:“嘿,慢点!”1.2 电流闭环的作用而电流闭环呢,就是确保电机在运行时不会超负荷。
你可以把它想象成你的车载电脑,时刻监控电机的“健康状态”。
如果电机的电流过大,就像是车上的发动机超负荷一样,电流闭环会自动调整电流,防止电机“过劳”工作,保障电机的长寿命和稳定性。
这就像车上的“健康检查”,时刻关注电机的“身体状况”,让它保持在最佳状态。
2. 如何设计双闭环系统?说到设计双闭环系统,那可不是简单的“煮熟的鸭子嘴里跑”,而是要细心雕琢的“工艺品”。
设计时,你需要考虑到很多细节,就像调配一杯完美的鸡尾酒一样,必须把每个成分都搭配得恰到好处。
2.1 控制器的选择首先,你得挑选一个靠谱的控制器。
开关磁阻电机的设计与应用
开关磁阻电机的设计与应用引言开关磁阻电机是一种新型的电机,具有结构简单、体积小、响应快、效率高等优点,在工业生产和家用电器等领域得到广泛应用。
本文将介绍开关磁阻电机的设计原理、构造和工作方式,并探讨其在不同领域的应用。
1. 开关磁阻电机的设计原理开关磁阻电机是通过控制磁场的方向和大小来实现转动,其设计原理基于磁阻效应和磁场的反转。
当电流通过绕组时,会产生一个磁场,根据右手定则,当磁阻材料中的磁场方向与绕组的磁场方向相反时,就会出现瞬时的磁流偏移,导致磁场的反转。
通过不断地反转磁场的方向,可以产生连续的转动力。
2. 开关磁阻电机的构造开关磁阻电机主要由转子、定子和驱动电路组成。
2.1 转子转子是开关磁阻电机的核心部件,由磁阻材料制成。
磁阻材料通常采用铁短路片或磁铁片,具有高导磁性和低磁饱和性。
转子上绕有线圈,通过控制线圈通电情况,可以控制转子的磁场方向和大小。
2.2 定子定子是开关磁阻电机中固定的部件,用于产生或感应磁场。
定子一般由永磁体或电磁体构成,永磁体具有固定的磁场,电磁体则通过外部电源提供磁场。
定子的磁场与转子的磁场交互作用,产生转动力。
2.3 驱动电路驱动电路是控制开关磁阻电机正常工作的关键部分,它负责提供正确的电流和电压信号,并控制磁场的反转。
驱动电路一般由电能转换器、控制芯片和传感器组成。
3. 开关磁阻电机的工作方式开关磁阻电机主要有两种工作方式:单相工作和多相工作。
3.1 单相工作单相工作是指开关磁阻电机通过单个绕组进行驱动,具有结构简单、成本低的优点。
但由于只有一个驱动绕组,单相工作的开关磁阻电机转速较低,扭矩较小,适用于一些低负载和速度要求不高的应用。
3.2 多相工作多相工作是指开关磁阻电机通过多个绕组进行驱动,具有转速高、扭矩大的优点。
多相工作的开关磁阻电机可以灵活控制磁场的变化,达到更高的效率和更精确的转动性能。
但多相工作的开关磁阻电机相对于单相工作来说,结构复杂,成本较高。
基于MCF5213的开关磁阻电机控制系统设计
并通过试验验证了方案的可行性 。 实现方法,
控制与应用技术EMCA
2011 , 38 ( 3 )
其结构如图 2 所示。
[ 7]
微控制器
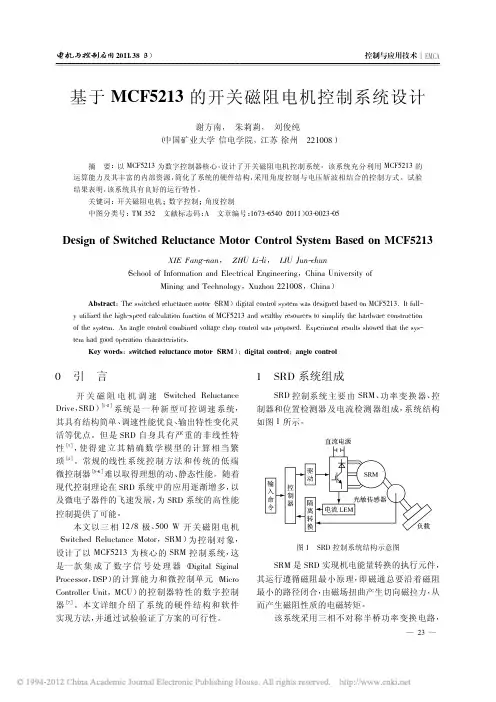
图1
SRD 控制系统结构示意图
SRM 是 SRD 实现机电能量转换的执行元件, 其运行遵循磁阻最小原理, 即磁通总要沿着磁阻 最小的路径闭合, 由磁场扭曲产生切向磁拉力, 从 而产生磁阻性质的电磁转矩。 该系统采用三相不对称半桥功率变构和软件
系统的最小化系统主要包括电源及其滤波电 路、 复位电路、 晶振电路及 PLL 滤波电路、 写入器 接口电路等。 2. 2 位置及速度检测 位置检测的目的是确定定子和转子的相对位 置, 然后将位置信号送到控制器, 以确定相绕组的 通断, 并且实现转速闭环控制。 MCF5213 的通用
电动汽车考试试题
10 10
1 1
-10
2.5
02 10
10 10
2 2
3 10
10 10
3 203 3.5
*解析法求解PID参数
( )、已知Gc ( s ) K P K D s 1
KI 、被控对象G ( s )。确定给定性能指 s 标下的PID参数。给定的性能指标 ess、 %、t s、等。 为 (2)、方法;给定稳态误差 ss,则若系统G ( s )原来是n型的,加入PID e 后,系统变成 1型。而误差常数 n 1 n K K I的值。 1 lim s n K I G ( s )。可求出 0 2 ess s 1
况下有; P jc K D (K KI )G ( jc ) 1e j (c ) j c
tg
1e j (c ) jK I X K P j c K D R jX、可求得K P R、K D 。 G ( j c ) c c
开关磁阻电机控制系统设计
摘要开关磁阻电机调速系统是一种新型电机调速系统,结构简单,成本低,调速性能优异,是传统交、直流电机调速系统的强有力竞争者,具有强大的市场潜力。
本文以DSP为控制核心,研究并设计了15kW三相12/8极SRM的调速实验系统,用于SRM控制技术的研究。
本文概述了开关磁阻电机调速系统(Switched Reluctance Drive,简称SRD)及其发展和研究现状,论述了其主要研究方向,阐述和分析了开关磁阻电机的结构、运行原理以及系统控制。
并且对SRD系统总体硬件结构进行了设计。
采用不对称半桥型结构,在进行了相关功率器件选型计算的基础上设计了该SRD调速实验系统的功率变换器。
然后,以TMS320LF2407为核心设计了开关磁阻电机控制系统的硬件电路,给出了包括电流检测、位置检测、故障保护等部分电路的详细设计,充分利用了DSP的丰富外设资源,达到了简化电路结构、提高运行可靠性的目的。
另外本文讨论了开关磁阻电机控制软件的设计,采用模块化编程方法,采用基于多中断的控制程序,提高了控制软件的效率。
最后,利用MATLAB/SIMULINK对上述12/8极开关磁阻电机调速系统建立了非线性仿真模型,并对该系统进行了仿真实验,实现了调速,并达到了开关磁阻电机调速系统研究和设计的预期目标,验证和深化了前文所取得一些理论成果,同时也为更近一步研究打下了基础。
关键词:开关磁阻电机;调速系统;DSP;MATLAB/SIMULINK;仿真ABSTRACTSwitched Reluctance Drive system is a new motor drive system. It has many good features for example simple structure, low cost and excellent driving performance. It's the strongest competitor to traditional AC and DC drive system, so it has powerful future.This paper developed a speed experimental system for a 3-phase 12/8-pole SRM of 15 kW based on TMS320LF2407 DSP, which can be used for the technical research on SRM control.The thesis summarizes the development and research of switched reluctance drive (SRD), discusses the main research direction. The structure of SRM, operation principle, and the control scheme of the SRD are elaborated and analyzed. And the whole structure of hardware is schemed out for the SRD speed experimental system. Adopting the dissymmetry half-bridge structure, a power converter is designed for the system after selection calculation of the corresponding devices. Then, TMS320LF2407 DSP is used to design the hardware circuits of SRM control system, and design details including the current detection, position sensing, fault protection and PWM output etc. are provided. Because of the full use of the abundant peripheral resources of DSP, it comes to the aim simplifying the circuit structure and heightening the reliability. Also, the thesis discusses the routine designing issue. Because the modularized programming method is adopted, and multi-interrupt processing technique is used, operation efficiency of the control software is highly raised. At last, with the MATLAB/SIMULINK a nonlinear simulation model for the foregoing 12/8-pole SRM control system is established. And the simulation experiments have been done on this model. Speed adjustment is realized, and other targets on the research and design of SRM control system are reached, which establishes a good foundation for further research.Keywords:Switched Reluctance Motor; Drive System; DSP; MATLAB/SIMULINK;Simulation目录1 绪论 (1)1.1开关磁阻电机的发展概述 (1)1.2开关磁阻电机调速系统组成 (2)1.3开关磁阻电机调速系统研究现状和方向 (2)1.4本文研究的内容 (4)2 开关磁阻电机原理 (5)2.1开关磁阻电机的基本结构和运行原理 (5)2.1.1电机结构 (5)2.1.2运行的原理 (6)2.1.3电机的基本方程 (7)2.2开关磁阻电机调速系统的基本控制方式 (8)2.2.1角度控制方式(APC) (9)2.2.2电流斩波方式(CCC) (10)2.2.3电压斩波PWM控制方式 (11)2.2.4组合控制 (13)2.3系统控制方式及控制策略的确定 (13)3 SRD调速实验系统硬件设计 (15)3.1 SRD系统设计方案 (15)3.2基于TMS320LF2407控制器的SRD系统硬件结构设计 (16)3.3功率变换器设计与选型 (18)3.3.1功率变换器主电路的选择 (19)3.3.2功率开关器件的选择及参数计算 (19)3.3.3 IGBT驱动电路的设计 (21)3.4控制、检测和保护电路的设计 (22)3.4.1转子位置检测 (22)3.4.2 PWM输出电路 (23)3.4.3电流检测电路 (24)3.4.4故障检测与保护电路 (25)3.4.5键盘与显示电路 (27)4 软件设计 (29)4.1总的设计思路 (29)4.2主程序设计 (29)4.2.1初始化子程序 (29)4.2.2键盘和显示子程序 (31)4.2.3功率驱动保护子程序 (32)5 SRD系统仿真 (34)5.1基于MATLAB/SIMULINK的SRD非线性仿真模型的建立 (34)5.2 CCC方案下SRD仿真模型 (35)5.3 仿真结果 (40)6 总结 (45)参考文献 (46)翻译部分 (48)中文译文 (48)英文原文 (57)致谢 (68)1 绪论开关磁阻电机调速系统(Switched Reluctance Drive,SRD)是80年代中期发展起来的新型调速系统[1]。
开关磁阻电机毕业设计
performance ;modeling and simulation; MATLAB ;Control strategy
II
目录
摘 要...................................................................................................................................................... I ABSTRACT......................................................................................................................................... II 目录 ..................................................................................................................................................... III 1 绪 论 ................................................................................................................................................. 1 1.1 开关磁阻电机的研究历史和发展方向................................................................................... 1 1.2 本课
永磁同步电机的双闭环调速系统设计
永磁同步电机的双闭环调速系统设计胡建秋;丁学明【摘要】Permanent magnet synchronous motor has been widely used for its excellent performance. Aiming at the problem of unsatisfactory control results caused by the difficulty in parameter setting of dual closed-loop controllers, an improved double closed-loop PI controller based on pole configuration and Ramp function was proposed. From the perspective of the vector control algorithm of the permanent magnet synchronous motor, the system model of decoupling control with double closed-loop speed and current was established. In this model, the design methods of speed loop and current loop controller were discussed, and the calculation results of the parameters of the improved double loop controller were given. Computer simulations and practical tests were conducted on the research methods. The results showed that the optimized system reduced system overshoot, shortened the settling time, improved the dynamic response of the system, which indicated good engineering significance.%永磁同步电机因其优越的性能近年来得到了广泛应用.针对双闭环控制器参数整定困难所导致的控制效果不佳的问题, 文中提出了基于极点配置和Ramp函数的改进型双闭环PI控制器.从永磁同步电机矢量控制算法的角度出发, 建立了速度、电流双闭环解耦控制的系统模型, 并在此模型下论述了速度环、电流环控制器的设计方法, 给出改进后双闭环控制器参数的计算结果.对所研究方法分别进行了计算机仿真和实际试验, 结果表明优化后的系统减小了系统过冲, 缩短了稳定时间, 提高了系统动态响应, 具有良好的工程意义.【期刊名称】《电子科技》【年(卷),期】2019(032)003【总页数】5页(P21-25)【关键词】永磁同步电机;矢量控制;极点配置;Ramp函数;双闭环;PI【作者】胡建秋;丁学明【作者单位】上海理工大学光电信息与计算机工程学院,上海 200093;上海理工大学光电信息与计算机工程学院,上海 200093【正文语种】中文【中图分类】TP13永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)与永磁无刷直流电机相比,转矩脉动和铁芯损耗更小,并且具有调速范围宽、运行平稳、效率高等优点,近年来已得到越来越广泛的应用[1-2]。