QGW变电站智能机器人巡检系统技术规范第部分完整版
(完整版)《智能变电站运行管理规范》(最新版)
为进一步规范电网智能化变电站运行管理工作,保证智能设备安全可靠运行,本规范结合国家电网公司及相关网、省电力公司相关管理标准及现场运行实际,参考各省的《智能变电站运行管理规范》,完成现《智能变电站运行管理规范(最新版)》,供各单位参考和借鉴。
目录1 总则2 引用标准3 术语4 管理职责4.1 管理部门职责4.2 运检单位职责5 运行管理5.1 巡视管理5.2 定期切换、试验制度5.3 倒闸操作管理5.4 防误管理5.5 异常及事故处理6 设备管理6.1 设备分界6.2 验收管理6.3 缺陷管理6.4 台账管理7 智能系统管理7.1 站端自动化系统7.2 设备状态监测系统7.3 智能辅助系统8 资料管理8.1 管理要求8.2 应具备的规程8.3 应具备的图纸资料9 培训管理9.1 管理要求9.2 培训内容及要求1 总则1.1 为规范智能变电站设备生产管理,促进智能变电站运行管理水平的提高,保证智能变电站设备的安全、稳定和可靠运行,特制定本规范。
1.2 本规范依据国家和电力行业的有关法规、规程、制度,智能变电站技术标准、规范等,并结合智能变电站变电运行管理的实际而制定。
1.3 本规范对智能变电站设备的管理职责、运行管理、设备管理、智能系统管理、资料管理和培训管理等六个方面的工作内容提出了规范化要求。
1.4 本规范合用于江苏省电力公司系统内的智能变电站的运行管理。
常规变电站中的智能设备的运行管理参照执行。
1.5 本规范如与上级颁发的规程、制度等相抵触时,按上级有关规定执行。
2 引用标准Q/GDW 383-2022 《智能变电站技术导则》Q/GDW 393-2022《110 (66) kV~220kV 智能变电站设计规范》Q/GDW394 《330kV~750kV 智能变电站设计规范》Q/GDW 410-2022 《高压设备智能化技术导则》及编制说明Q/GDW 424-2022 《电子式电流互感器技术规范》及编制说明Q/GDW 425-2022 《电子式电压互感器技术规范》及编制说明Q/GDW 426-2022 《智能变电站合并单元技术规范》及编制说明Q/GDW 427-2022 《智能变电站测控单元技术规范》及编制说明Q/GDW 428-2022 《智能变电站智能终端技术规范》及编制说明Q/GDW 429-2022 《智能变电站网络交换机技术规范》及编制说明Q/GDW 430-2022 《智能变电站智能控制柜技术规范》及编制说明Q/GDW 431-2022 《智能变电站自动化系统现场调试导则》及编制说明Q/GDW 441-2022 《智能变电站继电保护技术规范》Q/GDW580 《智能变电站改造工程验收规范(试行)》Q/GDWZ414 《变电站智能化改造技术规范》Q/GDW640 《110 (66)千伏变电站智能化改造工程标准化设计规范》Q/GDW6411 《220kV 千伏变电站智能化改造工程标准化设计规范》Q/GDW642 《330kV 及以上330~750 千伏变电站智能化改造工程标准化设计规范》Q/GDW750-2022 《智能变电站运行管理规范》国家电网安监[2022]904 号《国家电网公司防止电气误操作安全管理规定》国家电网生[2022]1261 号《无人值守变电站管理规范(试行)》国家电网科[2022]574 《无人值守变电站及监控中心技术导则》国家电网安监[2022]664 号国家电网公司《电力安全工作规程(变电部份)》国家电网生[2022]512 号《变电站运行管理规范》国家电网生[2022]1256 号《输变电设备在线监测系统管理规范(试行)》3 术语3.1 智能变电站采用先进、可靠、集成、低碳、环保的智能设备,以全站信息数字化、通信平台网络化、信息共享标准化为基本要求,自动完成信息采集、测量、控制、保护、计量和监测等基本功能,并可根据需要支持电网实时自动控制、智能调节、在线分析决策、协同互动等高级功能的变电站。
变电站智能巡检机器人系统应用技术方案
目录1.项目背景 (2)2.项目需求 (3)3.机器人分类 (4)3.1.地面可升降机器人 (4)3.1.1.系统组成 (4)3.1.2.设计目标 (4)3.1.3.系统功能 (5)3.1.4.系统特点 (5)3.1.5.电磁兼容 (9)3.1.6.机器人参数 (9)3.2.轮式可升降机器人 (10)3.2.1.系统简介 (10)3.2.2.系统特点 (11)3.2.3.系统架构 (13)3.2.4.巡检系统 (13)3.2.5.设备参数 (14)3.3.室外地面轮式机器人 (15)3.3.1.系统特点 (15)3.3.2.系统参数 (16)4.系统的特点和优势 (17)4.1.系统主要设计特点 (19)4.2.可靠的抗低温措施 (21)4.3.安全设计 (21)4.4.EMC电磁兼容性设计 (22)4.5.防腐设计 (22)4.6.防水防尘设计 (23)4.7.散热设计 (23)4.8.系统主要功能设计 (23)5.系统软件功能简介 (25)5.1.软件界面介绍 (25)5.1.1.巡检监控 (25)5.1.2.机器人遥控 (26)5.1.3.设备告警信息确认 (28)5.1.4.主接线展示 (29)5.1.5.间隔展示 (29)5.1.6.巡检日志查询 (30)5.2.巡检结果浏览 (31)5.3.巡检报告生成 (33)5.4.未巡检点查询 (34)5.5.巡检结果分析 (35)5.5.1.对比分析说明 (35)智能巡检机器人系统技术方案5.5.2.生成报表 (37)1.项目背景变电站作业人员管理制度中,为了使管理人员能够及时了解、准确掌握本岗位的生产动态,控制处理跑、冒、滴、漏等各类安全隐患险情,各区域实行了巡检制度,主要是通过运行人员定期携带红外热像仪巡检来掌握设备的运行状态,并手工抄录各个仪表的读数。
这种模式存在着许多难以克服的问题:衡量尺度问题:运行经验是确保设备安全运行的一种技术能力,但运行经验的积累过程具有单一性。
精编【技术规范标准】Q/GDW智能变电站智能单元技术规范及编制说明
【技术规范标准】Q/GDW智能变电站智能单元技术规范及编制说明xxxx年xx月xx日xxxxxxxx集团企业有限公司Please enter your company's name and contentvQ/GDW×××—2008ICS 29.240国家电网公司企业标准Q / GDW428—2010智能变电站智能单元技术规范The technical specification for Intelligent unit in Smart SubstationII2010-××-××发布2010-××-××实施国家电网公司发布目次前言 (II)1 范围 (1)2 引用标准 (1)3 基本技术条件 (1)4 主要性能要求 (3)5 安装要求 (4)6 技术服务 (5)编制说明 (7)Q / GDW 428 — 2010II前言由于现行国家标准、行业标准、企业标准和IEC标准等未统一智能变电站智能组件中的智能单元技术要求等内容,为使智能变电站智能单元选型、设备采购等工作有所遵循,特编制本标准。
本标准提出的技术性能参数基于国内变电站中智能单元的设计、制造和运行经验。
由于智能变电站技术仍处于发展阶段,本技术规范的相关技术原则将随着技术的发展与成熟逐步修订和完善。
本规范由国家电网公司基建部提出并解释。
本规范由国家电网公司科技部归口。
本规范主要起草单位:河南省电力勘测设计院、中国电力工程顾问集团公司、江苏省电力设计院、四川电力设计咨询有限责任公司,四川电力试验研究院、山东电力工程咨询院有限公司。
本规范参与起草单位:浙江省电力设计院、陕西省电力设计院、安徽省电力设计院、国网电力科学研究院、浙江电力试验研究院。
本规范主要起草人:于广耀、戴敏、陈志蓉、曾健、黄晓博、耿建凤、王哲、鲁东海、郑旭、李琪林、黄萍、郭宗香、黄国方、阮黎翔、钱锋、宋雪燕、葛斌。
变电站智能巡视系统建设施工规范

变电站智能巡视系统工程 施工技术规范第 1 页 共 35 页巡视系统施工规范目录第一章 施工准备.............................................................................................................................11.1安全教育、安全技术措施编制及安全技术交底 ...................................................11.2组织施工力量 ........................................................................................................... 21.3施工文件准备 ........................................................................................................... 21.4准备工具仪表 ........................................................................................................... 21.5施工条件及环境检查 ............................................................................................... 31.6地线条件检查 ........................................................................................................... 3第二章 开箱验货.............................................................................................................................32.1. 清点货物...................................................................................................................32.2. 开箱验货...................................................................................................................3第三章 施工流程.............................................................................................................................43.1. 现场工作安排...........................................................................................................43.2. 施工总体安排...........................................................................................................4第四章 设备安装.............................................................................................................................64.1. 摄像机安装支架图...................................................................................................64.2. 摄像机安装大样图...................................................................................................94.3. 摄像机箱终端盒.....................................................................................................154.4. 摄像机弱电箱安装效果.........................................................................................154.5. 设备接地.................................................................................................................16第五章 综合布线要求及工艺规范...............................................................................................165.1. 综合布线的一般要求.............................................................................................165.1.1 前端终端箱部分.............................................................................................165.1.2 前端设备弱电箱部分.....................................................................................175.1.3 室外部分.........................................................................................................175.2. 线缆标识要求.........................................................................................................175.3. 设备的固定要求.....................................................................................................175.4. 设备安装一般要求.................................................................................................175.5. 前端摄像机安装环境要求.....................................................................................185.6. 设备安装后视觉效果图:.....................................................................................185.7. 注意事项.................................................................................................................195.8. 现场布线工艺规范.................................................................................................195.8.1 布线原则.........................................................................................................195.8.2 布线方法.........................................................................................................205.8.3 线缆布放.........................................................................................................215.8.3.1 电缆沟布线.............................................................................................225.8.3.2 现场线缆头的加工.................................................................................225.8.3.3 线缆接续方法.........................................................................................255.8.3.4 综合布线中的不规范现象.....................................................................25第七章 设备上电要求...................................................................................................................267.1. 接线检查.................................................................................................................267.2. 上电原则.................................................................................................................26第 2 页 共 35 页巡视系统施工规范7.3. 前端设备上电.........................................................................................................27第八章 设备标识要求...................................................................................................................278.1. 设备、线缆标签、标牌使用要求.........................................................................278.2. 标签、标牌.............................................................................................................277.1.1 主线缆、光缆标牌.........................................................................................277.1.2 前端设备标识要求.........................................................................................287.1.3 前端弱电箱标牌.............................................................................................28第九章 附录...................................................................................................................................28附录 A常用符号、术语及缩写对照表 ............................................................................. 28附录 B (资料性附录) 常用线缆的选用及线芯定义...........................................................29附录 C (资料性附录) 施工材料...........................................................................................29附录 D (资料性附录) 几种常用工具的使用.......................................................................30第 3 页 共 35 页第一章 施工准备施工准备是整体安装过程的第一步,也是保障整个工程顺利进行的前提,主要包括以下 几个方面:1.1 安全教育、安全技术措施编制及安全技术交底 安全教育 施工前必须对所有施工人员进行安全教育,树立“安全第一”的思想。
QGDW—变电站智能机器人巡检系统技术规范部分

变电站智能机器人巡检系统技术规范第1 部分:变电站智能巡检机器人Technical specification for intelligent robot inspection system in substation ? —Part1: Intelligent robot for substation inspection 2016 - 11 - 25 发布2016 - 11 - 25 实施国家电网公司发布ICS 25.040.30Q/GDW国家电网公司企业标准Q/GDW 11513.1—2016 I前言为规范变电站智能巡检机器人的功能要求和性能指标,更好的指导和推进变电站智能机器人巡检系统在公司系统的实用化应用,制定本部分。
《变电站智能机器人巡检系统技术规范》标准分为2 个部分:——第1 部分:变电站智能巡检机器人;——第2 部分:监控系统。
本部分为《变电站智能机器人巡检系统技术规范》标准的第1 部分。
本部分由国家电网公司运维检修部提出并解释。
本部分由国家电网公司科技部归口本部分起草单位:国网山东省电力公司本部分主要起草人:冀肖彤、张斌、任志刚、王兴照、吕俊涛、叶飞、周大洲、黄锐、慈文斌、杜修明、郭源、孙志周、付崇光、王华广、孟海磊、韩磊。
本部分为首次发布。
本部分在执行过程中的意见或建议反馈至国家电网公司科技部。
变电站智能机器人巡检系统技术规范第1 部分:变电站智能巡检机器人1 范围本部分规定了变电站智能巡检机器人的分类与组成、技术要求、检验以及标志、包装、运输、贮存。
本部分适用于变电站智能巡检机器人。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅所注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 5170.13 电工电子产品环境试验设备基本参数检定方法振动(正弦)试验用机械振动台GB/T 17626.2 电磁兼容试验和测量技术静电放电抗扰度试验GB/T 17626.3 电磁兼容试验和测量技术射频电磁场辐射抗扰度试验GB/T 17626.8 电磁兼容试验和测量技术工频磁场抗扰度试验DL/T 664-2008 带电设备红外诊断技术应用规范DL/T 860 变电站通信网络和系统3 术语和定义下列术语和定义适用于本文件。
(完整版)QGW1799.1-2013《电力安全工作规程变电部分》(无附录
目录前言 (2)1 范围 (3)2规范性引用文件 (3)3术语和定义 (4)4总则 (4)5高压设备工作的基本要求 (5)6 保证安全的组织措施 (12)7 保证安全的技术措施 (20)8 线路作业时变电站和发电厂的安全措施 (25)9 带电作业 (26)10 发电机、同期调相机和高压电动机的检修、维护工作 (39)11 在六氟化硫(SF6)电气设备上的工作 (41)12 在低压配电装置和低压导线上的工作 (43)13 二次系统上的工作 (43)14 电气试验 (46)15 电力电缆工作 (50)16 一般安全措施 (53)17 起重与运输 (62)18 高处作业 (69)前言本规程依据《关于委托补充修订〈安规〉的函》(安监一函[2008]12 号)对《国家电网公司电力安全工作规程(变电站和发电厂电气部分)(试行)》进行修订补充形成。
本规程主要内容包括总则和高压设备工作的基本要求,保证安全的组织措施,保证安全的技术措施,线路作业时变电站和发电厂的安全措施,带电作业,发电机同期调相机和高压电动机的检修、维护工作,在六氟化硫(SF6)电气设备上的工作,在低压配电装置和低压导线上的工作,二次系统上的工作,电气试验,电力电缆工作,一般安全措施,起重与运输,高处作业等十五部分。
本规程的附录A、附录B附录C附录D附录E附录F附录G附录H附录K附录N附录O、附录P、附录Q 为资料性附录。
本规程的附录I、附录J、附录L、附录M 为规范性附录。
本规程由国家电网公司安全监察质量部提出并解释。
本规程由国家电网公司科技部归口。
本规程起草单位:国家电网公司华东分部、国网上海市电力公司、国网江苏省电力公司、国网浙江省电力公司、国网安徽省电力公司、国网福建省电力有限公司、国家电网公司运行分公司、中国电力科学研究院。
本规程主要起草人:张雷、陆懋德、戴克铭、葛乃成、刘亨铭、聂宇本、方旭初、吴濡生、罗耀国、胡翔、李智勇、孙鹏、刘凯、刘庭、杨振强、韩学军、张印虎、刘昊、肖关荣、张健、杨光亮、张继明、周忠浩。
2019年变电站大型智能巡检机器人检测项
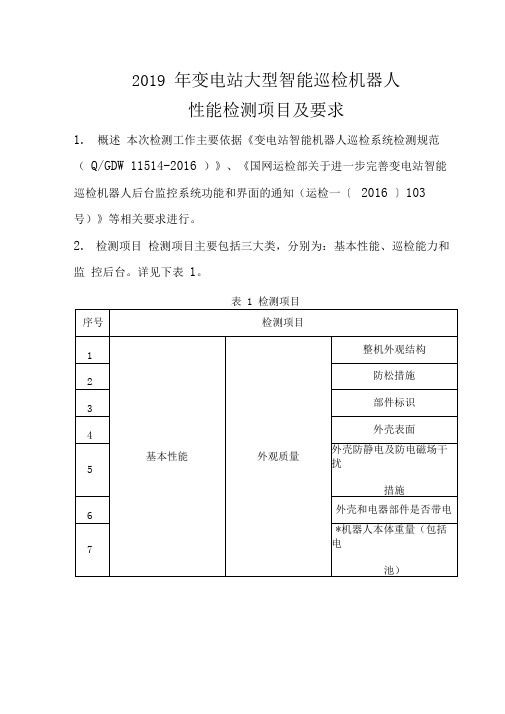
2019 年变电站大型智能巡检机器人性能检测项目及要求1.概述本次检测工作主要依据《变电站智能机器人巡检系统检测规范(Q/GDW 11514-2016 )》、《国网运检部关于进一步完善变电站智能巡检机器人后台监控系统功能和界面的通知(运检一〔2016 〕103 号)》等相关要求进行。
2.检测项目检测项目主要包括三大类,分别为:基本性能、巡检能力和监控后台。
详见下表1。
表1 检测项目序号检测项目注:表“*”号项目为重要技术参数,如该项不符合要求则将判定整体检测结果为不符合要求。
以上表格“ *”号只进行了检测大项初步标识,具体“ *”号对应的子项目以附件2“2019 年变电站大型智能巡检机器人性能检测表”为准。
3.检测项目技术要求3.1基本性能3.1.1外观质量机器人的外观质量应满足:整机外观美观整洁,整机结构坚固,所有连接件、紧固件应有防松措施,电机、支架等可更换部件应有一一对应的明显标识;外壳表面应有保护涂层或防腐设计,不应有伤痕、毛刺等其他缺陷;外壳应采取必要的防静电及防电磁场干扰措施;外壳和电器部件的外壳均不应带电;机器人本体重量(包括电池)不超过100kg 。
将机器人主要部件的规格、型号和数量进行核查记录,与其实物照片一并作为检测机构出具检测报告的附录。
3.1.2可见光及红外成像质量可见光摄像机上传视频分辨率不小于高清1080P ;红外摄像头具备自动对焦功能,热成像仪分辨率不低于320*240 ;红外图像为伪彩显示、可显示影像中温度最高点位置及温度值、具有热图数据。
在巡检温度记录上应显示巡检点设备部件的最高温度并标记位置,设备部件的测温区域应有明显的标记框线,建模数据的框线应与测温结果的标记框线外形一致。
3.1.3运动功能1)具备无轨自主导航功能;前后方向和左右方向的重复导航定位误差不大于±10mm ,在1m/s 的运动速度下,最小制动距离不大于0.5m。
2)具备防碰撞功能,应具有障碍物检测功能,在行走过程中如遇到障碍物应及时停止,障碍物移除后应能恢复行走。
变电站巡检机器人维护规范
变电站巡检机器人维护规范巡检机器人维护、检测、诊断技术规范(版本号)前言为规范在用变电站巡检机器人维护、检测、诊断作业,使巡检机器人保持良好的技术状况,减少运行故障,保证运行安全,延长巡检机器人使用寿命,有效地服务变电站检测,特制定本标准。
1 范围本标准规定了巡检机器人日常维护、一级维护、二级维护的周期,作业内容和技术规范。
本标准适用于所有在用变电站巡检机器人系统。
2 定义本标准采用下列定义2.1 日常维护 routine maintenance以清洁、补给和安全检视为作业中心内容,由变电站负责人为主执行的巡检机器人维护作业。
2.2 一级维护 elementary maintenance除日常维护作业外,以清洁、润滑、紧固为作业中心内容。
并检查操控、操纵等安全部件和巡检巡视功能。
由服务工程师负责执行的巡检机器人维护作业。
2.3 二级维护 complete maintenance除一级维护作业外。
以检查、调整云台预置位、减速器间隙、充电箱充电座状态、雨刷等经过一定时间的使用容易磨损或变形的安全部件为主,并拆检电机托盘,检查调整驱动电机固定状况和工作状况,由维护工程师负责执行的巡检机器人维护作业。
3 巡检机器人维护分级和周期3.1巡检机器人维护的分级日常维护,一级维护,二级维护。
3.2 巡检机器人维护的周期3.2.1 日常维护的周期晨检,晚检。
3.2.2 一级维护、二级维护的周期3.2.2.1 巡检机器人一、二级维护周期的确定,应以巡检机器人行驶里程为基本依据。
巡检机器人一、二级维护行驶里程依据巡检机器人使用说明书的有关规定,同时依据巡检机器人使用环境条件的不同视情况而定。
3.2.2.2 一、二级维护时间间隔。
对于不便用行程里程统计、考核的巡检机器人,可用行驶时间间隔确定一、二级维护周期。
其时间(天)间隔可依据巡检机器人使用强度和条件的不同。
参照巡检机器人一、二级维护里程周期确定。
4日常维护4.1 对巡检机器人外观、巡检机器人外壳表面进行清洁,保持整机整洁。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Q G W变电站智能机器人巡检系统技术规范第部分HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】Q / GDW —2016变电站智能机器人巡检系统技术规范第 1 部分:变电站智能巡检机器人Technical specification for intelligent robot inspection system in substation ?—Part1: Intelligent robot for substation inspection2016 - 11 - 25发布2016 - 11 - 25实施Q/GDW 国家电网公司企业标准 Q/GDW —2016 I前言为规范变电站智能巡检机器人的功能要求和性能指标,更好的指导和推进变电站智能机器人巡检系统在公司系统的实用化应用,制定本部分。
《变电站智能机器人巡检系统技术规范》标准分为 2 个部分:——第 1 部分:变电站智能巡检机器人;——第 2 部分:监控系统。
本部分为《变电站智能机器人巡检系统技术规范》标准的第 1 部分。
本部分由国家电网公司运维检修部提出并解释。
本部分由国家电网公司科技部归口。
本部分起草单位:国网山东省电力公司。
本部分主要起草人:冀肖彤、张斌、任志刚、王兴照、吕俊涛、叶飞、周大洲、黄锐、慈文斌、杜修明、郭源、孙志周、付崇光、王华广、孟海磊、韩磊。
本部分为首次发布。
本部分在执行过程中的意见或建议反馈至国家电网公司科技部。
变电站智能机器人巡检系统技术规范第 1 部分:变电站智能巡检机器人1 范围本部分规定了变电站智能巡检机器人的分类与组成、技术要求、检验以及标志、包装、运输、贮存。
本部分适用于变电站智能巡检机器人。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅所注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 电工电子产品环境试验设备基本参数检定方法振动(正弦)试验用机械振动台 GB/T 电磁兼容试验和测量技术静电放电抗扰度试验 GB/T电磁兼容试验和测量技术射频电磁场辐射抗扰度试验 GB/T 电磁兼容试验和测量技术工频磁场抗扰度试验 DL/T 664-2008带电设备红外诊断技术应用规范 DL/T 860变电站通信网络和系统3 术语和定义下列术语和定义适用于本文件。
变电站智能巡检机器人 intelligent robot for the substation inspecting由移动载体、通信设备和检测设备等组成,采用遥控或全自主运行模式,用于变电站设备巡检作业的移动巡检装置(以下简称机器人)。
变电站智能机器人巡检系统 intelligent robot inspection system in substation 由变电站智能巡检机器人、变电站智能机器人监控系统、电源系统等组成,能够遥控或自主开展变电站巡检作业。
变电站智能机器人监控系统 intelligent robot monitoring system in substation 由变电站智能机器人本地监控系统和远程监控系统组成,用于监控变电站智能巡检机器人运行的计算机系统(以下简称监控系统)。
变电站智能机器人本地监控系统intelligent robot local monitoring system in substation由监控主机、通信设备、监控分析软件和数据库等组成,安装于变电站本地用于监控变电站智能巡检机器人运行的计算机系统(以下简称本地监控系统)。
变电站智能机器人远程监控系统 intelligent robot remote monitoring system in substation安装于运维班驻地等场所,用于监控多个变电站智能巡检机器人的计算机系统(以下简称远程监控系统)。
机器人室 robot room变电站智能巡检机器人完成自主充电的场所。
环境信息采集系统 ambient information acquisition system由变电站温度传感器、湿度传感器以及风速传感器等环境信息采集终端组成的系统。
机器人通信基站robot communication base station用于变电站智能巡检机器人与本地监控系统间数据通信的网络设备。
4 分类与组成变电站智能机器人巡检系统的组成变电站智能机器人巡检系统组成配置应满足表1的要求。
表1 变电站智能机器人巡检系统配置系统组件配置要求变电站智能巡检机器人● 本地监控系统● 机器人室● 环境信息采集系统● 机器人通信基站● 远程监控系统○ 导航磁条○ 注:●表示必须配置的系统组件,○表示可选配的系统组件。
变电站智能巡检机器人的分类按使用方式分类分为:a) 单站使用型:每站配备一台机器人;b) 集中使用型:多个变电站通过轮转的方式集中使用一台机器人。
按导航方式分类分为:a)有轨导航:需用磁条对机器人进行导航;b)无轨导航:无需用磁条对机器人进行导航。
5 技术要求使用条件正常环境要求在如下环境条件下应能正常工作:a) 环境温度:-25℃~+50℃;b) 相对湿度:5%~95%;c) 最大风速:20m/s。
特殊环境要求严于上述环境要求的,应另行提出。
结构及外观要求整机外观结构整机外观整洁,连接线应固定牢靠,布局合理,不外露。
整机结构坚固,所有连接件、紧固件应有防松措施。
电机、支架等可更换部件应有一一对应的明显标识,以指示是否正确安装。
外壳表面外壳表面应有保护涂层或防腐设计。
外壳表面应光洁、均匀, 不应有伤痕、毛刺等其他缺陷,标识清晰。
外壳防护等级应满足 IP55。
电气部件布线内部电气线路应排列整齐、固定牢靠、走向合理,便于安装、维护,并用醒目的颜色和标志加以区分。
机器人重量机器人重量不超过100kg。
电磁兼容要求静电放电抗扰度机器人应能承受GB/T 第5章规定的严酷等级为4级的静电放电抗扰度试验。
射频电磁场辐射抗扰度机器人应能承受GB/T 第5章规定的严酷等级为2级的射频电磁场辐射抗扰度试验。
工频磁场抗扰度机器人应能承受GB/T 第5章规定的严酷等级为4级的工频磁场抗扰度试验。
机械振动性能要求机器人应能承受GB/T 规定的振动耐久试验。
巡检功能要求可见光检测机器人应配备可见光摄像机,能够对设备外观、设备分合状态及表计指示等进行检测,并将图像实时上传至本地监控系统。
可见光摄像机上传视频分辨率不小于高清 1080P。
可见光最小光学变焦倍数 30 倍对有读数的表盘及油位标记的误差小于 5%。
红外检测机器人应配备热红外成像仪,能够对一次设备的本体、导线和接头的温度进行采集,并能将红外图像及温度数据实时上传至本地监控系统。
红外摄像头具备自动对焦功能,热成像仪分辨率不低于 320*240;红外图像为伪彩显示、可显示影像中温度最高点位置及温度值、具有热成像图数据。
测温精度应控制在±2℃或±2%。
噪声检测机器人应配备音频采集设备,能够采集设备噪声,并能够实时上传至本地监控系统。
运动性能要求自主导航定位机器人自动导航定位重复定位误差不大于±10mm。
防碰撞功能机器人应具备防碰撞功能,在自主行走过程中正面遇到障碍物(高150mm X 宽100mm)应及时停止或绕行,对于停止的机器人,障碍物移除后应能恢复行走。
一旦发生碰撞,机器人应能够及时停止并发出报警,不会导致损坏。
防跌落功能机器人在移动过程中,碰到沟槽、下落台阶等情况时,能够及时停止并报警。
越障能力机器人应具备越障能力,越障高度不低于50mm。
涉水能力具备涉水功能,最小涉水深度为100mm。
爬坡能力爬坡能力应不小于15°。
转弯半径最小转弯直径应不大于其本身长度的2倍。
续航能力电池供电一次充电续航能力不小于5h,续航时间内,机器人应稳定、可靠工作。
充电能力电池完成一次充电应不大于5h。
电池完全充放电次数不少于500次,电池容量不小于80%。
在水平地面上的最大速度应不小于1 m/s。
在1m/s的运动速度下,制动距离应不大于。
垂直范围0°~ +90°。
水平范围±180°。
自动充电功能机器人具有自主充电功能,巡检任务完成后或电池电量不足时能够自动返回充电。
双向语音对讲功能机器人应配备音视频采集和语音播放设备,可与本地监控系统实现音视频实时传输。
机器人自检机器人应具备自检功能。
自检内容应包括电源、驱动、通信和检测模块等部件的工作状态,发生异常时应就地指示,并能上传信息。
通信性能要求变电站智能巡检机器人的最大遥控距离应不小于 1km,工作应可靠。
两台或两台以上变电站智能巡检机器人在同一变电站内工作时,其控制信号不应相互干扰。
监控系统应能实时、可靠地接收变电站智能巡检机器人采集的图像、语音、数据等信息并进行处理。
智能报警功能机器人异常报警应包括电池电源异常、驱动异常、检测功能异常、信号传输异常。
被检设备异常报警应包括过热、三相温差异常、各类表计读数异常、设备分合状态异常等。
环境信息采集变电站智能机器人巡检系统应具有环境温度、湿度和风速采集功能。
巡检报告巡检数据应能自动形成巡检报告,红外巡检部分应满足DL/T664-2008中附录I的要求。
系统互联应遵循DL/T 860和国家电网公司相关企业标准,提供与变电站监控系统、智能辅助控制系统、设备(资产)运维精益管理(PMS)等系统的接口。
机器人室接地机器人室应有明显的接地点并与变电站主接地网有效连接。
夜间和雨天巡视功能机器人应配备照明设备和雨刷器,满足夜间巡视和雨天巡视的要求。
状态指示功能机器人应具有状态指示功能。
可指示机器人巡检作业时的工作状态、充电状态及报警状态。
电源适应性要求机器人宜采用锂电池供电。
直流允许幅值偏差:额定电压值的±20%。
220V 交流电源电压,允许幅值偏差±10%。
机器人转运集中使用型机器人应有专用的转运辅助工具,单人能够完成机器人转运环节的操作。
6 检验检验分类检验分型式试验和出厂检验。
型式试验型式试验应该是制造厂家将装置送交具有资质的检测单位,由检测单位依据试验条目完成检验,检验项目表2中规定的检验项目逐个进行,并出具型式检验报告。
有以下情况之一时,应进行型试验:a)新产品定型,投运前;b) 连续批量生产的装置每五年一次;c) 生产设备重大改变时;d)正式投产后,因设计、工艺材料、元器件有较大改变,可能影响机器人性能时;e)出产检验结果与型式试验有较大差异时;f)国家技术监督机构或其委托的技术检验部门提出型式试验要求时;g)合同规定进行型式试验时。
出厂检验每台机器人出厂前,必须由制造厂的检验部门进行出厂检验,检验项目逐个进行,全部检验合格后,附有合格证可允许出厂。