履带式挖掘机行走和回转液压控制系统
挖掘机液压系统的工作原理
挖掘机液压系统的工作原理
挖掘机液压系统是通过液压传动来实现工作的。
液压系统由液压泵、液压执行器和控制装置组成。
1. 液压泵:液压泵将液体(通常是油)从油箱中吸入,通过压力产生装置,将油液压力增加,并将其送到液压执行器。
2. 液压执行器:液压执行器包括液压缸和液压马达。
液压泵通过将高压液体送入液压缸或液压马达来驱动机械运动。
液压缸将液压能转化为机械能,驱动挖掘机的各种动作,如臂、斗杆、铲斗等的伸缩、提升、旋转等。
液压马达则将液压能转化为马达机械能,驱动履带行走。
3. 控制装置:液压系统的控制装置用于控制液压泵的工作和液压执行器的动作。
常见的控制装置有手动控制阀、电动控制阀和比例控制阀等。
通过操作控制装置,可调节液压泵的流量和压力,以及控制液压执行器的运动和速度。
在挖掘机工作时,操作员通过操纵手柄或按键控制液压阀门的开闭和泵的流量,从而控制液体的流动方向和速度,进而实现挖掘机的各种运动。
由于液体具有不可压缩性和良好的传递性能,液压系统能够传递更大的力矩和功率,并具有响应速度快、可靠性高、动作平稳等优势。
履带挖掘机行走制动原理
履带挖掘机行走制动原理一、概述履带挖掘机是一种常见的工程机械设备,其行走制动系统起着至关重要的作用。
本文将详细探讨履带挖掘机行走制动原理。
二、行走制动系统的组成履带挖掘机行走制动系统主要由以下几个部分组成:2.1 履带链履带链是履带挖掘机行走制动系统的重要组成部分。
它由一系列链节和链轮组成,可以有效地将履带挂在车身的两侧。
履带链的制动效果与行走速度直接相关。
2.2 制动器制动器是履带挖掘机行走制动系统的核心部件。
它通过与履带链或驱动齿轮直接接触,产生制动摩擦力,从而减速或停止履带挖掘机的行走。
2.3 制动液制动液是履带挖掘机行走制动系统的液压介质。
它通过液压系统将制动力传输到制动器,从而实现行走制动功能。
三、行走制动原理履带挖掘机的行走制动原理可以归纳为以下几个方面:3.1 制动器的工作原理制动器通过调节制动器蹄片或摩擦盘的压力,使其与履带链或驱动齿轮产生摩擦,从而产生制动摩擦力。
这种制动摩擦力可以使履带挖掘机减速或停止行走。
3.2 制动液的作用机制制动液在行走制动系统中起着传递制动力的作用。
当制动器收到制动指令时,制动液通过液压系统传输制动力到制动器,并使其产生足够的制动摩擦力。
3.3 制动力的控制履带挖掘机的行走制动力需要通过控制制动器的压力来实现。
可通过调整制动器的液压系统或制动器本身的结构来控制制动力的大小,以达到适合不同工况的行走制动效果。
四、行走制动系统的应用履带挖掘机的行走制动系统广泛应用于各种工程领域。
以下是行走制动系统的一些应用场景:4.1 坡道行走在坡道行走时,行走制动系统可以通过增加制动摩擦力,使履带挖掘机保持在稳定的行走速度或停止行走,确保安全可靠。
4.2 紧急制动在出现紧急情况时,行走制动系统可以迅速响应制动指令,通过增加制动力使履带挖掘机迅速停止行走,避免事故的发生。
4.3 精确控制行走制动系统还可用于对履带挖掘机的行走速度进行精确控制。
通过调节制动器的制动力大小,可以实现精确的行走速度调节,提高工作效率。
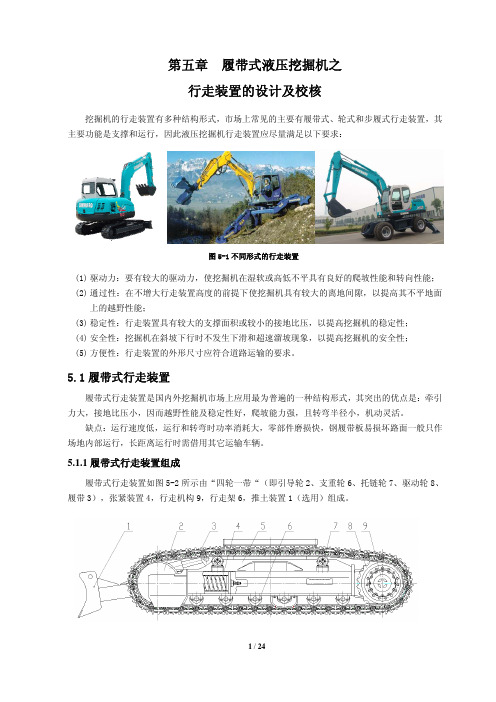
履带式液压挖掘机之行走装置的设计及校核
轮,驱动轮下方与支重轮下缘要有一升变量,以防止刚性轨链在绕过导向轮时呈多角形的轨链节在 接地时顶起导向轮使整机摇晃,升变量为:
图 5-14 升变量示意图
δ≥
t 360 2 sin z
* (1 − cos α )
(5-9)
(9)行走相关计算 A、行走机构输出转速 n
n=
式中:
Q ηv i*q
1 4 6 3 7 8 5 1—左链轨节 2—右链轨节 3—销轴 4—销套 2 5—锁紧销套(用户组装特制) 6—销垫 7—锁紧销垫(用户组装特制) 8—锁紧销轴(用户组装特制) 9—螺栓 10—螺母 11—履带板 10 9 11
图 5-3 履带的典型结构及其组成
吨位不同的挖掘机选用节距不同的履带,挖掘机用履带的技术要求及规格尺寸可参考国家建筑 工业行业标准 JG/T 57-1999,目前,该标准没有涵盖小挖和特大型挖掘机应用的履带规格,在这些 挖掘机履带选型时,可根据机器的技术条件,参照履带生产厂家的技术标准。
1 2 9 3 4 5 6 5 2 7 8 1—螺塞 2—端盖 3—轴 4—轴套 5—浮动油封 6—浮动油封环 7—O 形圈 8—销 9—轮体
图 5-4 支重轮的典型结构及其组成
3. 托链轮
用于托起上部履带,防止其过度下垂。在托链轮的布置设计时,需考虑履带脱离驱动轮的离去 角和滑向引导伦的引入角,以减小履带运行过程时的内阻。托链轮的结构与支重轮类似,所以在有 些挖掘机上用支重轮来替代。挖掘机用托链轮的技术要求及规格尺寸可参考国家建筑工业行业标准 JG/T 58-1999《液压挖掘机 托链轮》以及生产厂家的技术标准。
图 5-11 伸缩式行走架
9. 推土装置
在小型挖掘机上, 一般都装有推土装置, 其主要功能是推土平地, 同时在挖掘作业时辅助支撑, 增加整机的稳定性。
挖掘机履带行走系统介绍
5
三、履带行走系统的缺点
行走速度低 功率消耗大 零件磨损快 易损坏路面 长距离运行时需要借助运 输车辆
2019/4/20 履带行走系统
6
四、履带行走系统的构成
▋回转支承 ▋组合行走架 ▋四轮一带 ▋张紧装置 ▋履带护罩
2019/4/20 履带行走系统
7
(一)回转支承 HSN.30.1220A
回转支承每 工作500小 时加注黄油 (两个部位: 滚道、齿部)
2019/4/20
履带行走系统
8
(二)组合式行走架 分为X、H型
• WY06、 20、22、 30、均X 型、采用 箱型结构, 经有限元 分析,明 显优于H 型
2019/4/20 履带行走系统
9
组合式行走架制造应注意的问题
安装表面部位的加工必须达到计设要求, 否则影响安装接触表面质量 行走系统焊缝外露,因此要注意焊缝的 外观和强度 几大部件为加工后再焊接,必须注意焊 接顺序,以减少对加工尺寸的影响
履带行走系统
17
张紧装置维修
WY20张紧装置剖视图
2019/4/20
履带行走系统
18
张紧装置的维修与维护
注油器处漏油:更换注油器 张紧装置中部漏油:更换O形圈 活塞处漏油:更换密封圈 履带松驰可能是张紧装置漏油所致,必须加注 黄油(加注后履带不宜过度张紧),漏油严重 时必须对张紧装置维修
21
2019/4/20
履带行走系统
3
柳工挖掘机履带行走系统参数
机型 项目
WY30
WY22
WY20-2
WY06
轮 轨
距 距
3600 2600 550
挖掘机行走原理

挖掘机行走原理
挖掘机行走原理是指通过履带或轮胎等方式实现挖掘机在工地上的灵活移动。
具体来说,履带式挖掘机的行走原理是通过履带带动挖掘机的移动。
履带是由一系列的链轮、导轮和履带板组成的。
驱动链轮通过发动机的动力传递给履带,在履带板与地面之间形成摩擦力,从而推动挖掘机前进或后退。
履带的底部还会有一些减震装置,以提供更加平稳的行走体验。
而轮胎式挖掘机的行走原理则是通过减震系统控制挖掘机的轮胎转动,从而实现行走。
轮胎通过传动装置与发动机相连,发动机提供动力,通过减震系统将动力传递给轮胎,使其旋转并推动挖掘机前进或后退。
轮胎式挖掘机相较于履带式挖掘机行走更加灵活,适用于一些比较平坦的工地。
无论是履带式还是轮胎式挖掘机,驱动系统都是关键的部件,它负责将发动机的动力传递给履带或轮胎,从而实现挖掘机的行走。
此外,控制系统也起到重要作用,它通过操作杆或操纵手柄控制挖掘机前进、后退、转弯等动作。
总之,挖掘机行走原理是通过履带或轮胎作为动力传递的媒介,将发动机的动力传递给挖掘机的移动装置,实现机械在工地上的灵活行走。
浅析履带式挖掘机液压系统的特点及故障分析

履带式液压挖掘机行走驱动系统牵引特性分析
, .
液压 泵 的排 量 ( / ) 2 . 3 mL r 8 5 O 行 走 液 压 马 达排 量 口
mL/ r
4 0 4 5
5 0 4 5
6 0 4 5
7 1 4 5
4 5
4 5
系 统 压 力 A ( a p MP ) 行走 液 压 马达 扭 矩
挖 掘 机 行 驶 速 度 ( i/ ) 1 2 20 2 7 3 3 4 1 k h . . . . . n
高速档行 走机构速度 y (皿・ -) / k h1
・
1
3. 63
4. 51
。
j 卜 怔逮 档蕞 压 曩排 量
“ q , = Z 一 Z l q 。… … … … … … () … 3
作 者 简 介 :曲 德 韵 ( 9 7) 1 8一 ,男 , 山东 泰 安 人 ,在 读 硕 士 研 究 生 , 主要 从 事 车 辆 工 程 方 面 的 研 究 。
・
l0 O ・
机 械 工 程 与 自 动 化
\ /
低 i 一 速挡 5 行走机 构牵引力
7 1 4 /8 52
2 8 2 8
22 0 0 22 0 0
0 9 .7 0 9 .7
O 9 .7 O 9 .7
枯 口' f 嗽
…
/ .
i
= : :
\3
: 懈 : : —— 嚣 - —: =
第 5期 ( 第 1 4期 ) 总 7
2 1 0 2年 1 月 0
机 械 工 程 与 自 动 化 M ECHANI CAL ENGI ERI NE NG & AUTOM ATI ON
No. 5 Oc . t
挖掘机在履带上旋转的原理

挖掘机在履带上旋转的原理
挖掘机在履带上旋转的原理是通过履带运动和液压系统的配合来实现的。
具体原理如下:
1. 履带运动原理:挖掘机通过驱动履带来实现移动和旋转。
履带系统由驱动轮、托辊、链板组成。
驱动轮通过电机或液压马达带动,并通过链条将动力传递给链板,使挖掘机产生前进或后退的动力。
2. 液压系统原理:挖掘机的液压系统控制履带运动。
液压系统由液压泵、液压缸、控制阀等组成。
液压泵将液压油输出到液压缸,液压缸通过推拉活塞来实现挖掘机的运动。
控制阀用于控制液压泵的流量和压力,从而控制挖掘机的速度和力量。
3. 旋转原理:挖掘机通过液压系统中的旋转马达来实现履带上的旋转。
旋转马达通过不同的液压油流方向和大小控制履带的旋转方向和速度。
当液压油流经过旋转马达时,它会驱动旋转轴进行旋转,从而使挖掘机在履带上旋转。
总之,挖掘机在履带上旋转的原理是通过履带运动和液压系统的相互配合来实现的。
履带系统提供了移动和旋转的动力,液压系统控制履带的运动,并通过旋转马达来实现履带上的旋转。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
・ /.・
ABC %2* 8B / 第 %2 卷* 第 / 期 机械研究与应用 * * * * * * * * * * * * * * * ’&&/D%’ ’&&/ 年 %’ 月 045678957: ;4<47;56 = 7>>:957?9@8
左、 右两驱动轮液压齿轮马达 ! 三位四通手动换向阀 "# 和 "$ ! 单向背压阀 %& ! 回归油箱, 此时两驱动轮液压齿轮马达处 于正转状态, 挖掘机向前行驶。当遇上后退 ( 俗称倒车) 的情 况时, 只要分别将 ’ 只三位四通手动换向阀 "# 和 "$ 换位, 即 将其置于图示中的左位, 使两液压齿轮马达处于反向运转状 态, 挖掘机即向后作逆向行驶。当需要挖掘机改变行驶方向 时, 只要调节调速阀 (# 或 ($ ( 其中的一件) , 改变两履带驱动 轮液压齿轮马达的转速差即能达到; 若挖掘机向右转向时 (从 车后向车前进方向看) , 调节 (# 阀件使右驱动轮液压齿轮马 达减速; 若向左转向时, 调节 ($ 阀件使左驱动轮液压齿轮马 达减速。当需要急转弯时, 将一侧驱动轮液压齿轮马达保持 正向运转, 另一侧驱动轮液压齿轮马达停转或反转 ( 将控制该 液压马达的三位四通换向阀置于中位或左位) , 即能实现挖掘 机急转弯。当转向完成, 需作向前行进时, 就立刻恢复两驱动 轮液压齿轮马达正常运转时的旋转状态。 入左油缸右腔、 右油缸左腔, 而液流流出的方向为: 由左油缸 左腔、 右油缸右腔 ! 液控单向阀 .$ ! 溢流阀 /$ ! 三位四通手 动换向阀 ", ! 回归油箱, 此时挖掘平台作顺时针旋转 ( 由上 向下俯视战车) 。当需要挖掘平台作逆时针旋转时, 将三位四 通手动换向阀 ", 置于左位, 则此时液流流过该换向阀后的流 动方向变为: 由单向阀 -$ ! 液控单向阀 .$ ! 进入左油缸左 腔、 右油缸右腔, 回油方向为: 由左油缸右腔、 右油缸左腔 ! 液 控单向阀 .# ! 溢流阀 /# ! 三位四通手动换向阀 ", ! 回归油 箱。挖掘平台回转速度的快慢, 可通过调节两溢流阀 /# 和 /$, 改变两液压油缸进油和回油的速度来实现。
66666666666666666666666666666666666666666666666
( 上接第 $% 页) 能提高效率, 但因受到安装结构和叶片宽度的限制, 效果不会 很明显。
$" 结" 论
井下涡轮发电机由于受到安装尺寸的限制, 其叶片宽度 一般较小, 采用等螺距螺旋叶片, 便于加工和维修。同时由于 叶轮叶片宽度较小, 进口一般无涡流, 出口也不易产生回流, 有利于减少流体能量的损失。叶轮的进口和出口处需要进一 步改进, 以减小流体冲击区和滞留区。 该涡轮发电机的转速较高, 能适应的流量范围较大, 有利 于实现较稳定的功率输出。其叶轮对能量的利用率很低, 能 量损失较大, 最大水力效率只有 "&3 左右。叶型结构的改进
参考文献:
[%] * 傅德薰, 马延文+ 计算流体力学 [ 0] + 北 京: 高 等 教 育出 版 社, ’&&’+ [’] * 黄* 思, 周先华+ 节段式多级离心泵全三维湍流场的数值模拟 [ 1] + 西华大学学报 ( 自然科学版) , ’&&" , ’( (/) : )- ! (’+ [)] * 沈阳水泵研究所, 中国农业机械化科学研究院+ 叶片泵设计手 册 [ 0] + 北京: 机械工业出版社, %2.)+
图 #! 动力和行走机构
此时液压系统中的液流方向为: 过滤器 # - 液压齿轮泵 ( - 单 向阀 " - 调速阀 ’6 和 ’> - 三位四通手动换向阀 /6 和 /> -
($$. - $M - (, ! 收稿日期: 作者简介: 沈! 佳 ( #M.M - ) , 女, 浙江湖州人, 讲师, 主要从事机械专业的教学和实习指导工作。
图 (! 回转机构
[ = > ?] <; 液压控制系统
挖掘机行走和回转机构的液压控制系统, 其示意布置原 理如图 " 所示。其中: # 为过滤器; ( 为液压齿轮泵; " 为单向 阀; ’6 和 ’> 为调速阀; /6、 /> 和 /: 为三位四通手动换向阀; .6 和 .> 为液控溢流阀; ,6 和 ,> 为单向阀; L6 和 L> 为液控单向 阀; M 为电磁溢流阀; #$ 为单向背压阀。 < ) :; 履带行走系统 当启动挖掘机运作时, 先启动水冷式柴油机, 待其稳定运 行后, 通过操作机械脚踏式离合器, 使液压齿轮泵上排运转、 并泵油。片刻后, 当液压系统进入稳定的工作状态时, 将图 " 中的 ( 只三位四通手动换向阀 /6 和 /> 均置于图示右位, 则
・ "-・
!"# $%&&’%(# )* $%+#&,’--#& #.$%/%+)& %01 ’+2 (3&)&)+)& "31&%4-’$ $)0+&)--’0( 232+#5 0123! 456
( !"#$%&’( %’)*+,&-%*’ .+*$#/- 0/"**1,234"*3 !"#$%&’(! "#"$$$ , 5"%’&) 672+&%$+:%157 6895:;2 57 9< =27:85>2 912 92:13<;<?5:6; 98637@<8A695<3 9< 7<A2 <;= - 9BC2= 2D:6E69<87,A6=2 >B 63 23928C8572 53 912 3<891 <@ F12G563?) %12B :163?2= 912 798H:9H827 <@ 91258 :68856?27 63= ?B8<8<9<87 539< 1B=86H;5: 798H:9H827,A6I53? 912 <C28J 6953? A<82 @822;B 63= ?<9 KH592 76957@6:9<8B C86:95:6; 827H;97) 8#3 9)&12:2D:6E69<8;92:13<;<?5:6; 98637@<8A695<3;1B=86H;5: 7B792A;C86:95:6; 827H;97 ! ! 浙北某施工企业在改制后, 为提高施工作业的实效, 增强 企业的核心竞争力, 开拓创新, 对一批传统机械式履带挖掘机 进行改造, 将其上的行走和回转机构改造为液压装置, 取得较 好的综合实效, 使旧机子获得新生。
N<; #M! O< . 机械研究与应用 第 #M 卷! 第 . 期 ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ($$.J#( PQRS+OTR+U VQ0Q+VRS W +XXUTR+%TYO ($$. 年 #( 月
履带式挖掘机行走和回转液压控制系统
沈! 佳
( 浙江信息工程Biblioteka 校, 浙江 湖州! "#"$$$ )
挖掘机行走机构的形式为履带自走式, 主要有驱动轮、 支 重轮、 平衡轮、 张紧轮、 前导轨、 后导轨和钢质履带等组成, 发 动机为自循环水冷式柴油机, 设置在履带上方车体的前部。 原先结构上的驱动轮, 其动力传递方式机械直联式, 不仅体积 较大, 且制动时的摩擦片消耗也较大, 特别是在雨天, 有泥浆 进入摩擦面时, 刹车会失灵, 不仅影响作业, 而且影响安全。 而改造成液压系统控制式后, 由于不受环境的影响, 从而操作 状况得到改观。 其改进后的示意结构布置如图 # 所示。整机中的履带起 支承和行走传动的作用, 并由齿式驱动轮带动。只要控制左 右两驱动轮的转速、 转向和转速差, 就能实现挖掘机的前进、 后退、 转向或停止, 原来由发动机通过变速器、 后桥来驱动的。 改进后的履带驱动轮的动力, 分别来自于各自的 # 台由液压 系统控制的液压齿轮马达, 只要控制液压齿轮马达输出轴的 旋转状况, 就可控制挖掘机的运动状况。
!
摘! 要: 叙述某施工企业对一批旧式挖掘机进行技术改造, 将其上的行走和回转机构改造为液压装置, 使操作变得更灵活自如, 取得 了较好的综合施工实效。 关键词: 挖掘机; 技术改造; 液压系统; 施工实效 中图分类号: %&’(() ( * ’! ! ! ! ! ! 文献标识码: +! ! ! ! ! ! 文章编号: #$$, - ’’#’ ( ($$. ) $. - $$/. - $(
[)] * 凌勇坚+ 农用吸泥船及其液压控制系统 [ 1] + 液体传动与控制, ’&&( (/) : %- ! %.+ [(] * 凌勇坚+ 气压机械手的设计 [ 1] + 起重运输机械, ’&&( (%) : ’) ! ’(+ ["] * 凌勇坚+ 联合收割机橡胶履带的优化设计 [ 1] + 农业现代装备, ’&&/ (/) : (/ ! (-+ [/ ] * 林 国 重+ 液 压 传动 与 控 制 [ 0] + 北 京: 北京 理 工 大学 出 版 社, %2./+
#" 实际效果
挖掘机行走和回转机构改造为液压系统后, 好处显而易 见: 自如, 能根据施工现场的作业条件, 改变挖 !操作更灵活、 掘时的回转速度, 提高作业的实效。"减少故障的发生率, 减 轻操作人员的劳动强度和维修工作量, 降低施工成本, 有助于 施工工程进度的加快。# 让过时的旧设备换发了生机, 走出 一条开拓思路、 技术挖潜的新路子, 提升企业的设备管理的水 平。$提高施工企业的经济效益和核心竞争力。 正因为挖掘机液压控制系统的优化设计带来许多好处, 所以, 当改进后的挖掘机一经投入使用, 便给企业带来较好的 综合施工效益。