chapter2-5励磁系统稳定器
励磁ESS和PSS稳定器
jM D (d )
同步转矩系数 阻尼转矩系数
同步转矩 增量
阻尼转矩 增量
M D (d )
M e D
M s (d )
系统稳定,要求:
• 同步转矩>0 • 阻尼转矩>0
17
假定 Ede 恒定 Ede 0 无励磁控制
D
(s) Mm(s)
1 K3Td'os 0 TJ s2 0K1 1 K3Td'os K2K3K40
Eq
xd
xT 1
UG
U L1
xL
xT 2
xL UL2
U
10
1、基本方程
Uq Ud
U U
cos sin
UGq UGd
U U
cos sin
Id Xe IqXe
Eq' IqXq
Id
X
' d
I q I d
U cos0 XEq q'XUe sin 0
X
' d
Xe
U Gq
Eq'
X
' d
I
d
UGd X qIq
d 0
阻尼转矩增量
轻负荷情况下,K5>0 同步转矩增量↓
重负荷情况下,K5<0 同步转矩增量↑
阻尼转矩增量↑ 阻尼转矩增量↓
简单式励磁控制:
➢ 增加同步发电机同步转矩系数 ➢ 但同时引进了负阻尼
21
三、电力系统稳定器(PSS)
引进人为信号 → 增强阻尼
PSS的原理
转子运动方程:
TJ
d
dt
M m
'
滤波器
主要保证相位
d
继电保护安全自动装置课件——3_第二章 同步发电机励磁自动控制系统

③提高继电保护装置工作的正确性
当系统处于低负荷运行状态时,发电机 的励磁电流不大,若系统此时发生短路故 障,其短路电流较小,且随时间衰减,以 致带时限的继电保护不能正确工作。励磁 自动控制系统就可以通过调节发电机励磁 以增大短路电流。使继电保护正确工作。 由此可见,发电机励磁自动控制系统 在改善电力系统运行方面起了十分重要的 作用。
a F
c d 1 23
b
上述极简单的示例,使我们得到启示:在一定的 条件下,励磁自动控制系统如果能按照要求进行 某种适当的控制,同样可以改善电力系统的暂态 稳定性。
要使励磁系统在短暂过程中完成符合要求的控制必须要求励 磁系统具备快速响应的条件。为此,一方面缩小励磁系统的 时间常数,另一方面尽可能提高强行励磁的倍数。
2、同步发电机励磁控制系统的任务
• ⑴电压控制 • ⑵ 控制无功功率的分配 • ⑶提高同步发电机并联运行的稳定性
• ⑷改善电力系统的运行条件
• ⑸水轮发电机组要求实行强行减磁
(1)电压控制
电力系统在正常运行时,负荷总是经常波动的,同步发电机的功率也就相应变 化。随着负荷的波动,需要对励磁电流进行调节以维持机端或系统中某一点的电 压在给定的水平。励磁自动控制系统担负了维持电压水平的任务。 IG IEF
PGmax*
0.75 0.70 0.65 0.50
PGmax*
Te=0.1S
0.75
K=4
K=2 K=1
0.70
0.65 0.50
Te=0.8S
0.35
0 0.2 0.4 0.6 0.8
Te(s)
0.35 0 1 2 3 4
K
⑷改善电力系统的运行条件
当电力系统由于种种原因,出现短时低电压时,励磁 自动控制系统可以发挥其调节功能,即大幅度地增加 励磁以提高系统电压。这在下述情况下可以改善系统 的运行条件。
EXC9200励磁系统用户手册 第2章 系统组成及功能

EXC9200励磁系统用户手册第 2 章系统组成及功能中国电器科学研究院有限公司广州擎天实业有限公司目录2-1EXC9200型励磁系统配置 (2)2-1.1型号规格 (2)2-1.2 EXC9200型励磁系统组成 (3)2-2励磁调节器单元 (4)2-2.1 调节通道 (4)2-2.2 励磁调节器硬件配置及技术指标 (5)2-2.3 励磁调节器软件功能 (12)2-2.4 励磁调节器的特殊控制功能 (31)2-2.5 故障和报警信号逻辑 (38)2-2.6 防错功能 (40)2-2.7 跟踪功能 (40)2-2.8 其他辅助功能 (41)2-3励磁系统功率单元 (43)2-3-1高频脉冲列形成技术 (44)2-3.2 脉冲变压器 (45)2-3.3集中式阻容保护 (45)2-3.4 智能化功率柜专有技术 (46)2-4灭磁及过压保护单元 (49)2-4.1灭磁及过压保护回路框图 (49)2-4.2灭磁柜的控制及显示部分 (51)2-4.3智能化灭磁柜专有技术 (52)2-5起励单元 (53)2-1 EXC9200型励磁系统配置EXC9200型励磁系统可根据电站具体需求,进行定制化生产,在主调节器及控制回路不变的情况下,可以选择不通的调节器冗余裕度,配置不同型式的功率整流部件和灭磁回路器件,组成多样的型号规格,可适应不同的需求。
2-1.1 型号规格FJL—4 V A L S P A D E 2 B I F⑴⑵⑶⑷⑸⑹⑺⑻⑼⑽⑾ (12) (13)⑴:励磁装置柜体数量⑵:调节器型号V——EXC9200⑶:调节通道组合方式T——双通道D——三通道⑷:人机界面L——液晶显示器⑸:柔性电制动———无此功能S——自并励接线,需独立的制动变压器A——他励接线,无专门的制动变压器⑹:整流桥冗余方式S——单桥,无冗余R——冷备用P——并联运行⑺:整流桥冷却方式A——实芯铝散热器H——热管散热器⑻:灭磁方式A——交流灭磁D——直流灭磁R——冗余灭磁⑼:功率柜型号(10)功率柜数量(11) 灭磁电阻型式A——线性电阻B——非线性电阻X——其它型式(12)功率柜和灭磁柜的控制显示方式I----HMI控制和显示方式,智能化N----通用表计、按钮等控制和显示方式,常规化(13) 系统内部通信互连方式F----光纤通信C----CAN总线2-1.2 EXC9200型励磁系统组成EXC9200型励磁系统主要由励磁调节器单元(调节柜)、功率单元(多个功率柜)、灭磁及过压保护单元(灭磁开关柜、灭磁柜、灭磁电阻柜等)、起励单元、励磁变压器等组成。
chapter2 同步发动机励磁自动控制系统

显然:
∆ I Q1 > ∆ I Q 2
第一节
概
述
(三)提高同步发电机并联运行的稳定性 • 励磁自动控制系统是通过改变励磁电流 I 载电动势 值来改善系统稳定性的。 E 1、励磁对静态稳定的影响
• q
EF
从而改变空
P
X ∑
G
=
E U sin δ X∑
q
δ
—系统总电抗,一般为发电机,两变压器,输电线电抗 之和; • • —发电机空载电动势 E q 和受端电压 U 间的相角。
•
第一节
概
述
(二)对励磁功率单元的要求
• • 要求励磁功率单元有足够的可靠性并具有一定 的调节容量 具有足够的励磁顶值电压和电压上升速度。
第二节 同步发电机励磁系统
• 同步发电机的励磁电源实质上是一个可控 的直流电源
直流励磁机 换流困难 交流励磁机 缩短主轴长度 发电机自并励
去掉滑环和电刷 无刷励磁系
二、交流励磁机励磁系统
(一)他励交流励磁机励磁系统
交流副励磁机
起励电源
400 Hz
交流励磁机
磁场开关
V
交流发电机
G
AE
100 Hz
TA
滑环
TV
自 励 恒 压 调 节 器
可控整流器 励磁调节器
触发器
放大器
电压检测
调差
图 2-11
他励交流励磁机励磁系统原理接线
第二节 同步发电机励磁系统
• (二)、无刷励磁系统
⎛Uc −Ub ⎞ ⎟ / 0.5 = 2∆U *bc RR = ⎜ ⎜ ⎟ ⎝ Ua ⎠
式中
(1/s)
∆U*bc —图中 bc 段电压标么值。
同步发电机励磁控制系统的稳定性分析
page10
1、根轨迹绘制
(3)分离点:
jw
d
1 0.12
d
1 1.45
d
1 25
0
d1,2 0.775,16.94
-25
显然,分离点应该位于实轴上
位于 1.45 ,0.12 之间
取 d 0.775,
-8.86 -1.45 -0.775
-0.12 σ
2019-5-31 North China Electric Power University page11
Z1
m
-0.12
Z2
2019-5-31 North China Electric Power University
0σ
page18
增加环节前后之性能比较
励磁系统根轨迹向左偏移,提高系统稳定性,改善系统动态特性。
jw
Z1
jw 6.28
-25 -8.86 -1.45 -0.775
σ -0.12
-25 Z3
必需增加校正环节
-0.12 σ
改变根轨迹渐近线, 处于虚轴左半平面
励磁系统稳定器
-6.28 增加开环传递函数的 零点
2019-5-31 North China Electric Power University page14
四、 提高励磁控制系统稳定性的方法
励磁控制系统中的 励磁电压
微分
反馈到综合放大 器中
物理系统 2019-5-31 North China Electric Power University
page4
二、自动控制理论之根轨迹法
根轨迹是当开环系统某一参数(如根轨迹增益)从 零变化至无穷大时,闭环特性方程的根在s平面上移动 的轨迹。
励磁侧电力系统自适应稳定器的设计

励磁侧电力系统自适应稳定器的设计
季黄平
【期刊名称】《陕西理工学院学报(自然科学版)》
【年(卷),期】2001(017)004
【摘要】设计一种用于经输电线与无限大母线连接的同步发动机励磁侧组合系统自适应稳定器.设计的方案与传统的电力系统稳定器不同,它包括几个自适应稳定器,且这些稳定器同时又并联工作.稳定控制信号由各个单一的电力系统自适应稳定器的加权获得.同时又研究了加权系数的选择方法.最后给出的系统的仿真结果表明该稳定器与以往电力系统稳定器相比具有强的鲁棒性.
【总页数】4页(P16-19)
【作者】季黄平
【作者单位】山特电子有限公司
【正文语种】中文
【中图分类】CM712
【相关文献】
1.具有电力系统稳定器的船舶发电机励磁设计 [J], 孙才勤;郭晨;史成军
2.励磁附加控制对电力系统稳定器的影响实例分析 [J], 盛超;张俊峰;魏伟
3.基于自适应差分算法的电力系统稳定器参数设计 [J], 杨祉涵;张雪霞;李奇;邓美玉
4.组合电力系统自适应稳定器PSS的设计 [J], 赵中旗;郑德忠
5.励磁侧组合电力系统混合自适应稳定器PSS的设计 [J], 窦春霞
因版权原因,仅展示原文概要,查看原文内容请购买。
电力系统自动装置原理 杨冠城第四章
PSS——电力系统稳定器 电力系统稳定器
PSS框图与传递函数
电力系统 自动装置原理
Kz 1 + Tz s
电力系统 自动装置原理
第二节、励磁控制系统的传递函数 第二节、
三、同步发电机传递函数
一阶惯性: GG (s ) =
KG 1 + Td′0 s
四、励磁-系统总传递函数
U G (s ) K A K G (1 + TR s ) = U REF (s ) (1 + T A s )(K E + TE s )(1 + Td′0 s )(1 + TR s ) + K A K G K R
当输电线负荷较重、转子相位角发生 振荡时,由于励磁调节器是采用按电 压偏差比例调节方式,所以提供的附 加励磁电流的相位具有使振荡角度加 大的趋势。但是,励磁调节器维持电 压是发电机运行中对其最基本的要求, 又不能取消其维持电压的功能。研究 表明,采用电力系统稳定器去产生正 阻尼转矩以抵消励磁控制系统引起的 负阻尼转矩,是一个比较有效的办法。
电力系统 自动装置原理
第三节、励磁自动控制系统的稳定性 第三节、
一、励磁系统稳定性计算
求系统的开环传递函数,求开环极点 计算以下量,以确定根轨迹的形状 (1)根轨迹渐进线与实轴的交点及倾角
(2)根轨迹在实轴上的分离点 (3)在 jω 轴交叉点的放大系数
根据劳斯判据,确定根轨迹与虚轴的交点 画出根轨迹图
I −I S E = EEA EEB I EEB iEE = (1 + S E )U E G φ = (1 + K )φ a E u E = Kφa
Ndφa dt + (1 + S E )U E GREE = u EE T du E + (1 + S )GR U = u E EE E EE E dt
EXC9200励磁系统用户手册 第2章 系统组成及功能
EXC9200励磁系统用户手册第 2 章系统组成及功能中国电器科学研究院有限公司广州擎天实业有限公司目录2-1EXC9200型励磁系统配置 (2)2-1.1型号规格 (2)2-1.2 EXC9200型励磁系统组成 (3)2-2励磁调节器单元 (4)2-2.1 调节通道 (4)2-2.2 励磁调节器硬件配置及技术指标 (5)2-2.3 励磁调节器软件功能 (12)2-2.4 励磁调节器的特殊控制功能 (31)2-2.5 故障和报警信号逻辑 (38)2-2.6 防错功能 (40)2-2.7 跟踪功能 (40)2-2.8 其他辅助功能 (41)2-3励磁系统功率单元 (43)2-3-1高频脉冲列形成技术 (44)2-3.2 脉冲变压器 (45)2-3.3集中式阻容保护 (45)2-3.4 智能化功率柜专有技术 (46)2-4灭磁及过压保护单元 (49)2-4.1灭磁及过压保护回路框图 (49)2-4.2灭磁柜的控制及显示部分 (51)2-4.3智能化灭磁柜专有技术 (52)2-5起励单元 (53)2-1 EXC9200型励磁系统配置EXC9200型励磁系统可根据电站具体需求,进行定制化生产,在主调节器及控制回路不变的情况下,可以选择不通的调节器冗余裕度,配置不同型式的功率整流部件和灭磁回路器件,组成多样的型号规格,可适应不同的需求。
2-1.1 型号规格FJL—4 V A L S P A D E 2 B I F⑴⑵⑶⑷⑸⑹⑺⑻⑼⑽⑾ (12) (13)⑴:励磁装置柜体数量⑵:调节器型号V——EXC9200⑶:调节通道组合方式T——双通道D——三通道⑷:人机界面L——液晶显示器⑸:柔性电制动———无此功能S——自并励接线,需独立的制动变压器A——他励接线,无专门的制动变压器⑹:整流桥冗余方式S——单桥,无冗余R——冷备用P——并联运行⑺:整流桥冷却方式A——实芯铝散热器H——热管散热器⑻:灭磁方式A——交流灭磁D——直流灭磁R——冗余灭磁⑼:功率柜型号(10)功率柜数量(11) 灭磁电阻型式A——线性电阻B——非线性电阻X——其它型式(12)功率柜和灭磁柜的控制显示方式I----HMI控制和显示方式,智能化N----通用表计、按钮等控制和显示方式,常规化(13) 系统内部通信互连方式F----光纤通信C----CAN总线2-1.2 EXC9200型励磁系统组成EXC9200型励磁系统主要由励磁调节器单元(调节柜)、功率单元(多个功率柜)、灭磁及过压保护单元(灭磁开关柜、灭磁柜、灭磁电阻柜等)、起励单元、励磁变压器等组成。
chapter2-5励磁系统稳定器
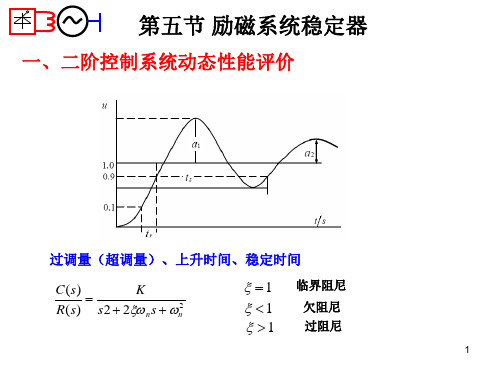
2 2 s 2 n s n
阻尼比 与 a 1 和 a 2 有关。 当
0
时, 励磁系统是稳定的, 当
1 .0
0 .7
时,只有很小的过调量(约 0.5%) ;当
时,临界阻尼。
第五节 励磁系统稳定器
u
U
a1
f
a2
1 .0 0 .9
ts
ts
tr
1
s s 0 . 12 s 25
0
(2-44)
式中, K
2 . 985 T F K F
第五节 励磁系统稳定器
j
增益为 K 时的根
j Z1
Z1
1 T
25
F
o
25
1 T
测量比较电路的传递函数可用下面表示
G R (s) U
de
(s)
KR 1T
R
(2-31)
s
U G (s)
式中
KR
—电压比例系数
第五节 励磁系统稳定器
综合放大单元、移相触发单元当作一个惯性环节。放大倍数 为 K 、时间常数为 T 。它们的合成传递函数是:
A
A
G (s)
K
A
1T As
功率放大单元是晶闸管整流器,工作是断续的,有可能造成 输出平均电压 u d 滞后于触发器控制电压信号 u SM 。 滞后时间为 T z 。 在分析中,这样一个延迟 环节可近似为一惯性环节。
U
EE
1
U
E
E
x ad T
f
E de
U
EE
1 T
chapter2-6电力系统稳定器
K1
M e
Eq' Eq' 0
Xq
X
' d
X
' d
Xe
I q0U sin 0
UE Q0 Xq Xe
cos 0
K2
M e Eq'
0
Xq
X
' d
Xe Xe
I q0
K3
X
' d
Xd
Xe Xe
K4
1 K3
Eq'
Ede 0
Xd
X
' d
X
' d
Xe
U sin 0
K5
UG
UU Eq' Eq' 0
M m M e
Tjs 0
s
第六节 电力系统稳定器
上述模型是在忽略同步发电机定子电阻、定子电流的直流分量(即认为 dd 0 和 dq 0 )以
dt
dt
及阻尼绕组的作用并认为小扰动过程中发电机转速变化很小, M m 0 情况下得到的。这时
发电机电压相量图如图 2-68 所示。
d Iq
角度,则经过励磁调节器和发电机的磁场后, U PSS 产生的电磁转矩
M PSS 刚好落在速度轴( )上如果 M PSS 足够大,则它和端电压为信
号的励磁调节器产生的转矩
M
' e
2
综合,合成转矩
M
e2
就在第一象限,
产生的同步转矩和阻尼转矩就都是正的,就可平息振荡了。
2C K A max
1C
K A min
()
50
60
70
80
90
100
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GG ( s ) = KG 1 + T do ' s
第五节 励磁系统稳定器
(四)励磁控制系统的传递函数
(2-41)
第五节 励磁系统稳定器
将前面已知的数据及 KR = 1代入上式,得
1 s(s + 0.12)(s + 25) + 2.985T F s + KF T F G(s)H(s) = 1.45⋅ K A KF ⋅ TF (s + 0.12)(s +1.45)(s + 25) s + 1 TF
π 5π = , β1 = π , β 3 = β1 3 3
− j6.28
图 2-62 某励磁系统的根轨迹图
第五节 励磁系统稳定器
(2)根轨迹在实轴上的分离点 闭环特征方程为
(1 + T A S )( K E + T E S )(1 + T ' do S )(1 + T R s) + K A K G K R = 0
忽略励磁机的饱和特性和放大器的饱和限制,则由图 2-61 可得
G ( s) =
K A KG (1 + T A S )( K E + T E S )(1 + T ' do S )
H ( s) =
KR 1+ TR S
K A K G (1 + T R s ) 所以 U G ( s ) = U REF ( s ) (1 + T A S )( K E + T E S )(1 + T ' do S )(1 + T R s ) + K A K G K R
A
G ( s) =
KA 1+ T A s
功率放大单元是晶闸管整流器,工作是断续的,有可能造成 输出平均电压 u d 滞后于触发器控制电压信号 u SM 。 滞后时间为 T z 。 在分析中,这样一个延迟 环节可近似为一惯性环节。
G( s) = Kz 1+ Tz s
(2-33)
第五节 励磁系统稳定器
SE
(b)
SE
+
U REF
KA ∑ −U 1 1 + TKE +TE s
KG 1 + T 'd 0 s
UG
KR 1+ T R s
图 2-61 励磁控制系统传递函数框图
第五节 励磁系统稳定器
前向传递函数表示为 G (s ) ,反馈传递函数表示为 H (s ) ,系统的传递函
G( s) U G ( s) = 数为 U REF ( s ) 1 + G ( s ) H ( s )
G
1 i EE G
EB
1
o
G
I EE
1 uE 得: , = u EE 1 + T EE s
式中
IB
IA
图 2-59 励磁机的饱和曲线
T
EE
=
L
EE
,上式即为励磁系统不计饱和的传递函数
REE G
第五节 励磁系统稳定器
(二)励磁调节器各单元的传递函数
• 励磁调节器主要由电压测量比较、综合放大及功率放大等 单元组成。 • 电压测量比较单元由测量变压器、整流滤波电路及测量比 较电路组成。其时间常数要取决于滤波电路的参数。数值 通常在0.02~0.06之间。
上式即为同步发电机励磁控制系统的闭环传递函数。
第五节 励磁系统稳定器
三、励磁自动控制系统的稳定性
(一)典型励磁控制系统的稳定计算 设某励磁控制系统的参数如下: :
' T A = 0 s ,T do = 8.38s ,T E = 0.69 s , T R = 0.04 s , K E = 1 , K G = 1
∑
1 KE +TE s
KG 1+ T 'd 0 s
UG
sK F 1+ T F s KR 1+ T R s
图 2-63 典型补偿系统的框图
第五节 励磁系统稳定器
+
U REF
∑
−
KA UR 1+ T A s KF s 1+ T F s
1 E de KE +TE s
KG 1+ T 'd 0 s
UG
KR 1+ T R s 1 E de KE +TE s 1+ T 'd 0 s KG KR 1+ T R s KG 1+ T 'd 0 s
1 K A KG ⋅ G (s ) = (2-39) T E T ' do K E s + 1 s + ' T E T do
第五节 励磁系统稳定器
反馈传递函数为
1 1 KR 1 KGT F s s + ' s + + s + ' ' T do TR TR T F K F T do T do K F ⋅ H (s ) = 1 1 KG T F s + s + T F TR
这可以在发电机转子电压 u E 处增加一条电压速率负反馈 回路,同样将其换算到 E de 处后,其传递函数为 K F s (1+T F s ) , 典型补偿系统框图如图 2-63 所示。
第五节 励磁系统稳定器
为了分析转子电压速率反馈对励磁控制系统根轨迹的影响,可以对 图 2-63 所示框图进行简化,其简化过程如图 2-64 所示。 由图 2-64(c)得增加转子电压速率反馈后( T A = 0 s )励磁控制系 统的等值前向传递函数为
用给定值带入,得
K = −( s3 + 26.57 s2 + 39.42 s + 4.32)
由 dk = 0 及 k>0
ds
解得 s = −0.775 ,这就是根轨迹在实轴上的分离点。
第五节 励磁系统稳定器
(3)在 jω 轴交叉点的放大系数: 闭环特征方程
Φ(s) = s3 + 26.57s2 + 39.42s + K + 4.32
UG
(a )
U REF
+
∑
−
−
KA UR 1+ T A s KF 1+ T F s
(b )
第五节 励磁系统稳定器
U REF
+
∑
−
K A KG (1 + T A s )(K E + T E s )(1 + T 'd 0 s )
' K F s (1 + T d 0 s ) KR + K G (1 + T F s ) 1+T R s
由图 2-61 可求得系统的开环传递函数为
G( s) H ( s) = K 4.32 K A K G K R = ( s + 0.12)( s + 1.45)( s + 25) ( s + 0.12)( s + 1.45)( s + 25)
式中
K = 4.32 K A K G K R
开环极点为 s= -0.12,s= -1.45,s= -25,它们是根轨迹的起始点。
测量比较电路的传递函数可用下面表示
U de ( s ) = K R G R ( s) = U G ( s) 1 + T R s
(2-31) )
式中 K R —电压比例系数
第五节 励磁系统稳定器
综合放大单元、移相触发单元当作一个惯性环节。放大倍数 为 K A 、时间常数为 T 。它们的合成传递函数是:
第五节 励磁系统稳定器
(1)根轨迹渐进线与实轴的交点及倾角:
σa = −
∑ P j − ∑ zi
j =1 i =1 n m
jω ( K A K R = 241)
j 6.28
n−m
= −8.86
− 25 − 8.86
π 3
− 1.45
− 0.12
σ
(2k + 1)π β= n−m
k=0,1,2
− 0.775
一、励磁自动控制系统响应曲线的一般讨论
过调量— a1 (标幺值)是响应曲线超过稳态 响应的最大值;
a1
u
a2
上升时间— t r 是响应曲线自 10%稳态响应值 上升到 90%稳态响应值时所需的时间 稳定时间— t s 是对应一个阶跃函数的响应 时间,在此以后响应曲线的值
1.0 0.9 0.1
ts
t s
1 K s + TF 的闭环系统特征方程,作出 G0 (s )H 0 (s ) 的根轨 递函数 G0 (s )H 0 (s ) = s (s + 0.12 )(s + 25)
U EE +
∑
−
1 UE TE s + KE
' E
x ad Tf
E de
U EE
U de 1 E de TE s + KE
(c)
S
(a)
U EE +
图 2-60 他励直流励磁机传递函数
∑
−
1 TE s + KE
'
E de
(a)他励直流励磁机的传递函数框图 (b)他励直流励磁机规格化框图 (c)不计饱和他励直流励磁机规格化框图