哈工大激光雷达一激光雷达基本知识共63页
哈工大激光雷达课件一——激光雷达基本知识

抗隐身目标能力
低仰角跟踪能力 低截获概率能力 多目标探测和跟踪能力 技术成熟程度
下
下 下 上 上
中
中 中 中 中
上
上 上 下 下
3.
激光雷达的优点
工作频率非常高,较微波高3~4个数量级。 激光作为雷达辐射源探测运动目标时多普勒
一 基 本 知 识
频率非常高,因而速度分辨率极高。
工作频率处于电子干扰频谱和微波隐身有效 频率之外,有利于对抗电子干扰和反隐身。
一 基 本 知 识
汞(HgCdTe)探测器和光伏型碲镉汞探测器
③
光学天线 透射式望ห้องสมุดไป่ตู้镜(开普勒、伽利略)
反射式望远镜(牛顿式、卡塞哥伦)
收发合置光学天线 收发分置光学天线
自由空间光路
全光纤光路 波片(四分之一、二分之一)
分束镜、合束镜、布鲁斯特窗片
④ 光学扫描器。
多面体扫描器,利用多面体(6-12面)的
2. 扫描激光成像雷达
非扫描激光成像雷达
1.
激光成像雷达的优点:
分辨率高,具有很高的角度、距离、速度和图 像分辨率,因而能探测飞行路径中截面积小的
激 光 成 像 雷 达
障碍物如电线、电线杆等;能使巡航导弹具有
地形跟随和障碍物回避的能力,有利于低空入 侵,特别是在夜晚和坏气象的条件下。
图像稳定。激光雷达图像所记录的是目标的三
激光雷达技术(1)
基本知识、应用前景、发展概况
哈尔滨工业大学航天学院 王春晖
1. 2.
绪论 基本知识、应用前景、发展概况 激光雷达基本理论 雷达方程、探测方式、传输特性、天线特性等
激光雷达系统基础知识单选题100道及答案解析

激光雷达系统基础知识单选题100道及答案解析1. 激光雷达系统利用()来测量距离。
A. 电磁波B. 超声波C. 激光D. 红外线答案:C解析:激光雷达系统是利用激光来测量距离的。
2. 激光雷达的工作原理主要基于()。
A. 光的折射B. 光的反射C. 光的衍射D. 光的干涉答案:B解析:激光雷达通过发射激光并接收反射回来的激光来工作,主要基于光的反射原理。
3. 以下哪种不是激光雷达系统的应用领域()?A. 自动驾驶B. 气象监测C. 医学成像D. 量子物理研究答案:D解析:量子物理研究通常不直接使用激光雷达系统,而自动驾驶、气象监测和医学成像中会用到激光雷达。
4. 激光雷达系统的精度主要取决于()。
A. 激光波长B. 激光频率C. 激光脉冲宽度D. 接收系统灵敏度答案:C解析:激光脉冲宽度越窄,测量精度通常越高。
5. 激光雷达系统中用于发射激光的部件是()。
A. 激光器B. 探测器C. 放大器D. 滤波器答案:A解析:激光器负责发射激光。
6. 以下哪种激光雷达类型测量速度最快()?A. 固态激光雷达B. 机械旋转式激光雷达C. 混合式激光雷达D. 难以确定答案:B解析:机械旋转式激光雷达可以在短时间内扫描较大的范围,测量速度相对较快。
7. 激光雷达系统的分辨率与以下哪个因素无关()?A. 激光束发散角B. 扫描频率C. 激光功率D. 目标距离答案:C解析:激光功率主要影响探测距离和信号强度,与分辨率关系不大。
8. 激光雷达系统在大气环境监测中可以测量()。
A. 风速B. 湿度C. 气压D. 以上都可以答案:D解析:激光雷达可以通过不同的技术手段测量风速、湿度、气压等大气参数。
9. 以下哪种技术可以提高激光雷达系统的抗干扰能力()?A. 编码调制B. 增加激光功率C. 提高接收灵敏度D. 扩大扫描范围答案:A解析:编码调制可以使激光雷达系统具有更好的抗干扰性能。
10. 激光雷达系统的最大探测距离主要受()限制。
激光雷达测绘技术的基本原理

激光雷达测绘技术的基本原理激光雷达测绘技术是现代测绘领域中一种常用的高精度测量方法。
它利用激光束对目标进行扫描和探测,通过检测激光束的反射信号来获取目标的三维空间位置信息。
这项技术在地理信息系统、遥感、自动驾驶等领域有着广泛的应用。
本文将就激光雷达测绘技术的基本原理进行介绍和探讨。
首先,让我们了解一下激光雷达的组成和工作原理。
激光雷达主要由激光发射器、接收器、光电探测器、时钟、扫描器和数据处理系统等组成。
激光发射器产生和发射出高功率激光束,激光束经过准直和调制后被发射出去。
扫描器旋转使得激光束不断扫描目标,接收器接收目标反射回来的激光束,并将其转化为电信号通过光电探测器转化为电信号,最后由数据处理系统对这些信号进行处理和分析。
接下来,我们来详细探究激光雷达测绘的基本原理。
激光雷达的工作原理基于激光束从发射到返回所花费的时间。
激光束在发射后以光速直线传播,当碰到目标物体时,一部分激光束被吸收,一部分被反射。
接收器接收到反射回来的激光束之后,通过计算激光束从发射到返回所经过的时间,可以得到激光束的飞行时间。
由于光速是已知的,所以可以通过飞行时间乘以光速,计算出激光束到目标的距离。
由于激光束的出射方向和位置是已知的,所以可以通过多次测量得到目标在三维空间中的坐标。
激光雷达测绘技术的精度和分辨率主要取决于激光束的特性以及设备的性能。
激光束的精度受到激光器的波长以及接收信号的噪声等因素的影响。
通常情况下,激光雷达的精度可以达到亚米级别。
分辨率则主要取决于激光束的发散角度和接收器的引导角度,这些参数决定了激光束在水平和垂直方向上的分辨率。
激光雷达测绘技术在地理信息系统中的应用非常广泛。
它可以用于制图、地形测量、城市规划等领域。
例如,在地形测量中,激光雷达可以快速获取地面上各点的高程信息,从而构建出精确的数字地形模型。
在城市规划中,激光雷达可以有效获取城市建筑物的三维信息,辅助进行城市规划和建筑设计。
除了在地理信息系统中的应用,激光雷达测绘技术在自动驾驶领域也有着重要的作用。
一文详解激光雷达
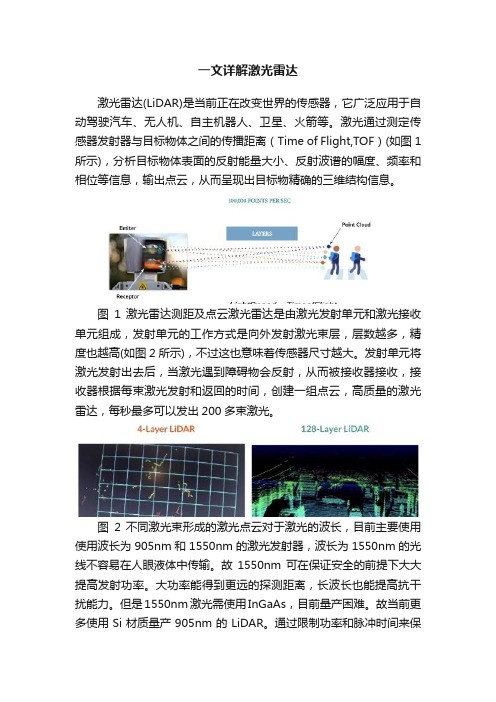
一文详解激光雷达激光雷达(LiDAR)是当前正在改变世界的传感器,它广泛应用于自动驾驶汽车、无人机、自主机器人、卫星、火箭等。
激光通过测定传感器发射器与目标物体之间的传播距离(Time of Flight,TOF)(如图1所示),分析目标物体表面的反射能量大小、反射波谱的幅度、频率和相位等信息,输出点云,从而呈现出目标物精确的三维结构信息。
图1 激光雷达测距及点云激光雷达是由激光发射单元和激光接收单元组成,发射单元的工作方式是向外发射激光束层,层数越多,精度也越高(如图2所示),不过这也意味着传感器尺寸越大。
发射单元将激光发射出去后,当激光遇到障碍物会反射,从而被接收器接收,接收器根据每束激光发射和返回的时间,创建一组点云,高质量的激光雷达,每秒最多可以发出200多束激光。
图2 不同激光束形成的激光点云对于激光的波长,目前主要使用使用波长为905nm和1550nm的激光发射器,波长为1550nm的光线不容易在人眼液体中传输。
故1550nm可在保证安全的前提下大大提高发射功率。
大功率能得到更远的探测距离,长波长也能提高抗干扰能力。
但是1550nm激光需使用InGaAs,目前量产困难。
故当前更多使用Si材质量产905nm的LiDAR。
通过限制功率和脉冲时间来保证安全性。
本文福利:分享报告《激光雷达行业报告2021》,公众号对话框回复【汽车ECU开发024】下载。
01.激光雷达的结构激光雷达的关键部件按照信号处理的信号链包括控制硬件DSP(数字信号处理器)、激光驱动、激光发射发光二极管、发射光学镜头、接收光学镜头、APD(雪崩光学二极管)、TIA(可变跨导放大器)和探测器,如图3所示。
其中除了发射和接收光学镜头外,都是电子部件。
随着半导体技术的快速演进,性能逐步提升的同时成本迅速降低。
但是光学组件和旋转机械则占具了激光雷达的大部分成本。
图3 激光雷达的关键部件02.激光雷达的种类目前市面上有不同种类的激光雷达,按驱动方式可分为机械式、MEMS、相控阵、泛光面阵式(FLASH)。
激光雷达测量系统介绍

激光雷达测量系统介绍激光雷达是一种能够通过发射和接收激光束来测量目标位置和形状的传感器。
它使用激光束在目标表面上形成回波并测量返回时间来计算目标与激光雷达的距离。
激光雷达主要由激光发射器、接收器、控制装置和数据处理器组成。
激光发射器发射出一束激光,经过目标后产生回波,回波由接收器接收。
控制装置负责控制激光发射和接收的时间间隔,数据处理器则负责处理接收到的数据,并计算出目标的位置和形状。
激光雷达测量系统具有许多优点。
首先,激光束是光电信号,传输速度快,能够实时获取目标的位置信息。
其次,激光雷达能够在长距离范围内进行测量,同时精度也很高。
再次,激光雷达可以工作在各种环境下,包括光照不好或恶劣天气条件。
最后,激光雷达的测量结果不受目标颜色、形状和纹理的影响,适用于各种不同的目标。
激光雷达测量系统在许多领域有广泛的应用。
在自动驾驶车辆中,激光雷达能够实时感知车辆周围的环境,帮助车辆避免障碍物并规划最优路径。
在机器人领域,激光雷达能够提供环境的三维地图,帮助机器人进行定位和导航。
在建筑工程中,激光雷达可以用于测量建筑物的形状和尺寸,帮助设计和施工过程中的精确测量。
在激光雷达的发展过程中,随着技术的进步,激光雷达的性能和精度也不断提高。
目前,已经出现了多线激光雷达和相位调制激光雷达等新型激光雷达技术。
多线激光雷达能够同时发射多束激光,并在接收端同时接收多个回波,从而提高测量效率。
相位调制激光雷达则能够通过测量激光的相位信息,实现更高的距离分辨率和测量精度。
总之,激光雷达测量系统是一种非常重要的传感技术,它在机器人、自动驾驶车辆、建筑工程等领域有着广泛的应用前景。
随着技术的不断发展,激光雷达的性能和精度将会进一步提高,为各个领域的应用提供更好的支持。
激光雷达作业课件

激光雷达的应用领域
军事侦察
激光雷达可以用于获取高精度 地形数据,为军事侦察和作战
提供支持。
地形测绘
通过激光雷达测量,可以快速 获取高精度地形数据,为地图 制作和地理信息系统提供基础 数据。
无人驾驶
激光雷达是无人驾驶车辆中重 要的传感器之一,用于感知周 围环境,实现自主导航和避障 功能。
环境监测
激光雷达可以用于监测大气污 染、气象变化和森林覆盖等情 况,为环境保护和治理提供支
扫描范围
扫描系统的扫描范围决定了激光雷达 的覆盖范围和分辨率。
数据处理系统
数据处理算法
数据处理系统负责处理接收到的 电信号,通过算法将其转换为三
维坐标数据。
数据存储与传输
数据处理系统还需要负责数据的存 储和传输,以便后续分析和应用。
系统集成
数据处理系统需要与整个激光雷达 系统集成,确保数据的一致性和准 确性。
激光雷达作业课件
contents
目录
• 激光雷达概述 • 激光雷达系统组成 • 激光雷达数据处理流程 • 激光雷达数据处理软件 • 激光雷达数据处理案例
01
激光雷达概述
激光雷达的定义
激光雷达是一种集激光、全球定位系统(GPS)和惯性测量单元(IMU)于一体的 主动遥感系统。
它通过向目标发射激光束,并测量反射回来的时间,计算出目标的距离和方位信息 。
软件功能
数据预处理
对导入的点云数据进行滤波、 降噪、去重等预处理操作,提 高数据质量。
数据分类
根据不同的应用场景,对点云 数据进行分类,如地面、建筑 物、树木等。
数据导入
支持多种格式的激光雷达数据 导入,包括XYZ、LAS等格式 。
激光雷达测距基本知识与其应用

目录摘要 (1)关键词 (1)Abstract (1)Key words (1)引言 (1)1雷达与激光雷达系统 (2)2激光雷达测距方程研究 (3)2.1测距方程公式 (3)2.2发射器特性 (4)2.3大气传输 (5)2.4激光目标截面 (5)2.5接收器特性 (6)2.6噪声中信号探测 (6)3伪随机m序列在激光测距雷达中的应用 (7)3.1测距原理 (7)3.2 m序列相关积累增益 (8)3.3 m序列测距精度 (8)4脉冲激光测距机测距误差的理论分析 (9)4.1脉冲激光测距机原理 (9)4.2 测距误差简要分析 (10)5激光雷达在移动机器人等其它方面中的应用 (10)6结束语 (11)致谢 (12)参考文献 (12)-激光雷达测距原理与其应用摘要:本文简单介绍激光雷达系统组成,激光雷达系统与普通雷达系统性能的对比,着重阐述激光雷达测距方程的研究。
针对激光远程测距中的微弱信号检测,介绍一种基于m序列的激光测距方法,给出了基于高速数字信号处理器的激光测距雷达数字信号处理系统的实现方案,并理论分析了脉冲激光测距机的测距误差。
了解并学习激光雷达在移动机器人等其它方面中的应用。
关键词:激光雷达;发射器和接收器特性; 伪随机序列; 脉冲激光;测距误差Applications and Principles of laser radar rangingStudent majoring in Optical Information Science and Technology Ren xiaonanTutor Shang lianjuAbstract:This paper briefly describes the composition of laser radar systems, laser radar system and radar system performance comparison of normal, focusing on the laser radar range equation. Laser Ranging for remote signal detection, presents a introduction of a sequence based on laser ranging method m, gives the high-speed digital signal processor-based laser ranging radar digital signal processing system implementations, and theoretical analysis of the pulse Laser rangefinder range error.We understand and learn application of Laser radar in the mobile robot and other aspects.Key words:Laser radar; Transmitter and receiver characteristics;Pseudo-random sequence;Pulsed laser;Ranging error.引言:激光雷达是传统雷达技术与现代激光技术相结合的产物,激光具有亮度高、单色性好、射束窄等优点,成为光雷达的理想光源,因而它是目前激光应用主要的研究领域之一。
激光雷达基础知识

什么是色散呢?当光纤的输入端光脉冲信号经过长距离传输以后,在光纤输出端,光脉冲波形发生了时域上的展宽,这种现象即为色散。
以单模光纤中的色散现象为例,如下图所示:如何消除色度色散对DWDM系统的影响:对于DWDM系统,由于系统主要应用于1550nm窗口,如果使用G.652光纤,需要利用具有负波长色散的色散补偿光纤(DCF),对色散进行补偿,降低整个传输线路的总色散。
光的衍射光在传播过程中,遇到障碍物或小孔时,光将偏离直线传播的途径而绕到障碍物后面传播的现象,叫光的衍射(Diffraction of light)。
光的衍射和光的干涉一样证明了光具有波动性。
物理学中,干涉(interference)是两列或两列以上的波在空间中重叠时发生叠加从而形成新的波形的现象。
光的干涉光的干涉现象是波动独有的特征,如果光真的是一种波,就必然会观察到光的干涉现象。
定义:两列或几列光波在空间相遇时相互叠加,在某些区域始终加强,在另一些区域则始终削弱,形成稳定的强弱分布的现象,证实了光具有波动性。
两束光发生干涉后,干涉条纹的光强分布与两束光的光程差/相位差有关:当相位差为周期的整数倍时光强最大;当相位差为半周期的奇数倍时光强最小。
从光强最大值和最小值的和差值可以定义干涉可见度作为干涉条纹清晰度的量度。
只有两列光波的频率相同,相位差恒定,振动方向一致的相干光源,才能产生光的干涉。
由两个普通独立光源发出的光,不可能具有相同的频率,更不可能存在固定的相差,因此,不能产生干涉现象。
大气气溶胶大气气溶胶是液态或固态微粒在空气中的悬浮体系。
它们能作为水滴和冰晶的凝结核、太阳辐射的吸收体和散射体,并参与各种化学循环,是大气的重要组成部分。
雾、烟、霾等都是天然或人为原因造成的大气气溶胶。
大气气溶胶是悬浮在大气中的固态和液态颗粒物的总称,粒子的空气动力学直径多在0.001~100μm之间,非常之轻,足以悬浮于空气之中,当前主要包括6大类7种气溶胶粒子,即:沙尘气溶胶、碳气溶胶(黑碳和有机碳气溶胶)、硫酸盐气溶胶、硝酸盐气溶胶、铵盐气溶胶和海盐气溶胶。