位移法典型方程计算举例
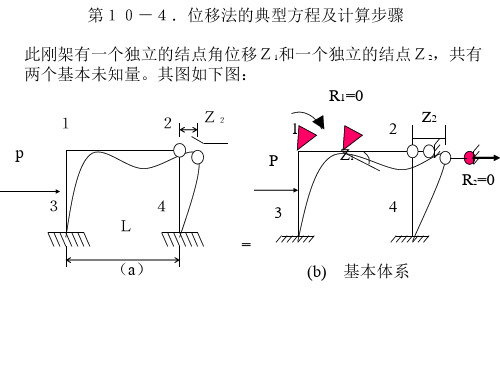
结构力学-位移法的典型方程及计算步骤
(e)
依题意可知并根据叠加原理上述条件可写为:
R1=R11+R12+R1P=r11 Z1+r12 Z2+R1P=0 R2=R21+R22+R2P=r21 Z1+r22 Z2+R2P=0
上述方程称为位移法基本方程,也称为位移法的典型方程。
为了求出典型方程的系数和自由项,可借助于表10-1,绘出基本
结构图,如下图10-7a,b, 和c所示。然后求出各系数和自由项。
r11 1 3i 4i
r12 6i1 0
R1P PL1 0
l
8
Z1=1
4i 1
2
6i 1l
2
Z2=1 1
2
3i M
3 2i 4
(a)
6i 3 l
3i 4 l
(b)
p
MP
PL 3
4
8
(C)
T10-7
1
2
r21 1
2
r22 1
6i l
0
12i
L2
3i
P
L2
2
2
R2P
0
系数和自由项可分为两类,分别由力矩平衡方程 M1=O求得为:
0
6 2 6 9 12 2 11 l Z1 l 2 Z2 16 P 0
Z1 0.02218 Pl Z2 0.02859 Pl 2
M M1Z1 M 2Z2 M P
转到下一节
者的原理有所不同。
§10-7 有侧移的斜柱刚架
B
B’
C’ C
C”
C
A
D
O A,D
B 结点位移图
O为极点,各结点位移前的位置
建筑力学(位移法)

第十七章位移法求解超静定结构的两种最基本的方法力法适用性广泛,解题灵活性较大。
(可选用各种各样的基本结构)。
位移法在解题上比较规范,具有通用性,因而计算机易于实现。
位移法可分为:手算——位移法电算——矩阵位移法力法位移法力法与位移法最基本的区别:基本未知量不同力法:以多余未知力基本未知量位移法:以某些结点位移基本未知量F PϕBϕB在忽略杆轴向变形和剪切变形的条件下,结点B 只发生角位移ϕB 。
由于结点B 是一刚结点,故汇交于结点B 的两杆的杆端在变形后将发生与结点相同的角位移。
位移法计算时就是以这样的结点角位移作为基本未知量的。
第一节位移法的基本概念BAClhEI 1EI 2首先,附加一个约束使结点B 不能转动,此时结构变为两个单跨超静定梁。
称为位移法的基本结构。
在荷载作用下,可用力法求得两根杆的弯矩图。
由于附加约束阻止结点B 的转动,故在附加约束上会产生一个约束力矩1631l F F P P -=C BAF P316Fl 532FlCAB然后,为了使变形符合原来的实际情况,必须转动附加约束以恢复ϕB 。
两个单跨超静梁在B 端有角位移时的弯矩图,同样可由力法求得。
此时在附加约束上产生约束力矩Bh EI lEI F ϕ⎪⎭⎫ ⎝⎛+=211143ϕB ϕBBA CB lEI ϕ13B h EI ϕ24B hEI ϕ22F PBAC求基本未知量,可分两步完成:1)在可动结点上附加约束,限制其位移,在荷载作用下,附加约束上产生附加约束力;2)转动附加约束使结点产生角位移ϕB ,使结构发生与原结构一致的结点位移。
ϕBϕB附加刚臂经过上述两个步骤,附加约束上产生约束力矩应为F 11和F 1P 之和。
由于结构无论是变形,还是受力都应与原结构保持一致,而原结构在B 处无附加约束,亦无约束力矩,故有F 11+F 1P =001634321=-⎪⎭⎫⎝⎛+Fl h EI lEI B ϕ解方程可得出ϕB 。
位移法典型方程将求出后ϕB ,代回图22-1c ,将所得的结果再与图22-1b 叠加,即得原结构(图22-1a )的解。
8-3、8-4位移法的基本未知量和基本结构__典型方程及计算步骤解析

§8.3 位移法的基本未知量和基本结构
确定独立的结点线位移另种一方法
( 1)不考虑轴向变形 长度不变 (2) 弯曲变形微小,受弯矩
把原结构的所有刚结点和固定支座均改为铰结点→铰结体系,如图b。 此铰结体系为几何不变,原结构无结点线位移。 此铰结体系为几何可变或瞬变,添加最少的支座链杆保证其几何不变, 添加的链杆数目既是原结构独立的结点线位移数目。如图b,加一个水 平支座链杆,体系成为几何不变的。
上一章复习
等截面直杆的杆端弯矩和剪力
1 A
B A
2i
B
A B
4i
M AB 4i M BA 2i
A B 1 A
6i/l
FQ 6i / l
6i/l
B A
12i/l2
B
6i/l
M AB 6i / l M BA 6i / l
FQ 12i / l 2
等截面直杆的杆端弯矩和剪力
1 A A B A
+
2 EI i 2l
EI A l
1
B
3i/l
3i/l 3i/l
1
1
EI 2l
1
=
6
+
EI 3i 2 (2l ) 2l 6 EI 3i 2 (2l ) 2l
1
q A EI l B
ql 2 3
ql 2 6
1 1 q (2l ) 2 ql 2 8 2
§8.3 位移法的基本未知量和基本结构
附加刚臂: 阻止刚结点的转动,但不能阻止结点的移动。 附加支座链杆:阻止结点的线位移。
图a所示刚架,在刚结点1、3处分别加上刚臂,在结点3处加上一根 水平支座链杆,则原结构的每根杆件都成为单跨超静定梁。
位移法的典型方程与力法的典型方程一样

位移法的典型方程与力法的典型方程一样位移法和力法是结构分析中常用的两种方法。
位移法是通过求解结构的位移来得到结构的反力,而力法是通过已知的外力和支座反力来求解结构的内力和位移。
尽管这两种方法的思想和计算过程不同,但它们的本质是相同的,都是基于平衡原理和变形原理,因此它们的典型方程也具有相似性。
一、位移法的典型方程位移法是一种基于变形原理的方法,它假设结构的变形是已知的,通过求解结构的位移来得到结构的反力。
位移法的典型方程是:$$boldsymbol{K}boldsymbol{u}=boldsymbol{F}$$其中,$boldsymbol{K}$是结构的刚度矩阵,$boldsymbol{u}$是结构的位移向量,$boldsymbol{F}$是结构的外力向量。
在这个方程中,$boldsymbol{u}$是未知量,$boldsymbol{K}$和$boldsymbol{F}$是已知量。
因此,通过求解这个方程,可以得到结构的位移和反力。
二、力法的典型方程力法是一种基于平衡原理的方法,它假设结构的外力和支座反力是已知的,通过求解结构的内力和位移来满足平衡条件。
力法的典型方程是:$$boldsymbol{K}boldsymbol{x}=boldsymbol{P}$$其中,$boldsymbol{K}$是结构的刚度矩阵,$boldsymbol{x}$是结构的位移向量,$boldsymbol{P}$是结构的等效节点力向量。
在这个方程中,$boldsymbol{x}$是未知量,$boldsymbol{K}$和$boldsymbol{P}$是已知量。
因此,通过求解这个方程,可以得到结构的内力和位移。
三、位移法和力法的相似性位移法和力法的本质是相同的,它们都是基于平衡原理和变形原理的。
因此,它们的典型方程也具有相似性。
首先,它们的典型方程都是线性方程组。
在位移法和力法中,结构的刚度矩阵和等效节点力向量都是已知的,未知量是结构的位移和反力(力法中是内力和位移)。
8-3、8-4位移法的基本未知量和基本结构__典型方程及计算步骤

§6.2.1 位移法的基本未知量
3
2
1
结点转角的数目:7个
独立结点线位移的数目:3个
§8.3 位移法的基本未知量和基本结构
图a所示刚架,结点线位移数目=2
图b所示刚架,结点角位移数目=2 结点线位移数目=2
§8.3 位移法的基本未知量和基本结构
确定角位移6个
确定线位移2个
§8.3 位移法的基本未知量和基本结构
图a所示刚架,结点角位移数目=4(注意结点2)
结点线位移数目=2
加上4个刚臂,两根支座链杆,可得基本结构如图b。
§6.2.1 位移法的基本未知量
1
2
1
1
2
3
§6.2.1 位移法的基本未知量
例1.
B
C
例2.
B
C
A 只有一个刚结点B,由于忽 略轴向变形,B结点只有 B
A
只有一个刚结点B, 由于忽略轴向变形及C 结点的约束形式,B结 点有一个转角和水平位 移 B BH
2kN/m 16kN
A
i
6m
B
3m
i
3m 16kN
Z1
C
2kN/m
A
B
C
解 (1)选取基本体系。
(2)建立位移法典型方程。
r11Z1 R1 0
(3)求系数和自由项。
4i
Z1=1
r11
A
2i
B
3i 18 6
M 1图
C
4i
3i
6
R1P
A
B
MP图(kN.m)
C
6
18
r11 4i 3i 7i
典型方程
位移法典型方程、计算举例

2.78
M M P M 1 C M 2 CH
2.09
0.70
例题2
计算举例
B C
求作弯矩图,EI=常数,各杆长L=6m A
19 kN
D
E
变形图 19 kN
解:1. 位移法变量:θB,ΔAH
2.附加约束作MP图,
并求R1P,R2P R1P=0 ,R2P= –19 kN
R2P
2
你能验算 吗?
例题1
计算举例
16 8
MP
4)位移法方程
r11 C r12 CH R1 P 0 r21 C r22 CH R 2 P 0
3i 4i
C
40 23 i
CH
64 23 i
M1
3i/L
M2
6i/L
5)作M图
2.附加约束(刚臂和支杆)作MP图,并求R1P、R2P
qL2/8
R1P= qL2/16
R2P= – qL
qL2/8
qL2/16
C
R1P
M P图
R2P
例题3
计算举例
2i 3i 4i 4i r21 6i/L r22
3 .作 M 1、 M 2图,求 r11, r21, r12, r22
6i/L
3i r11
n n
图 ,i 1, 2 , , n 。 由
叠 加 原 理 , 当 n 个 变 量 都 产 生 各 自 实 际 的 位 移( 角 度 或 侧 移 ) 时 ,在 第 i 个 变 量 处 产 生 的 力 为 :
r
j 1
ij
Z
j
, 为 消 去 该 处 的 约 束 力 , 令 :R iP
位移法典型方程根据

位移法典型方程根据(实用版)目录1.位移法的基本概念2.位移法的典型方程3.位移法的应用实例4.位移法的优缺点分析正文一、位移法的基本概念位移法是一种求解固体力学问题的数值方法,主要通过计算物体在受力作用下的位移来研究其内部应力和应变分布。
位移法基于弹性力学的基本原理,适用于求解各种复杂的固体力学问题,如梁、板、壳等结构在受力作用下的变形和内部应力分布。
二、位移法的典型方程位移法的典型方程是根据弹性力学原理推导得到的。
以一维简支梁为例,当梁受到均布荷载作用时,其位移法的典型方程为:挠度公式:f(x) = q(x-x0)/8EI弯矩公式:M(x) = EI*(f"(x)-qx)/2其中,f(x) 表示梁在 x 处的挠度,M(x) 表示梁在 x 处的弯矩,E 为材料的弹性模量,I 为梁的惯性矩,q 为均布荷载,x0 为梁的支点,f"(x) 为挠度的一阶导数。
三、位移法的应用实例位移法广泛应用于各种固体力学问题的求解,如梁、板、壳等结构在受力作用下的变形和内部应力分布。
例如,在求解简支梁在均布荷载作用下的挠度和弯矩时,可以采用位移法进行计算。
四、位移法的优缺点分析1.优点:位移法求解固体力学问题时,可以通过计算物体的位移来直接得到其内部应力和应变分布,避免了传统力学方法中的繁琐计算过程。
此外,位移法适用于各种复杂的固体力学问题,具有较强的通用性。
2.缺点:位移法的求解过程涉及到较高阶的微分方程,计算过程较为复杂。
在某些特殊情况下,位移法的求解结果可能不如其他方法准确。
总之,位移法作为一种求解固体力学问题的数值方法,具有广泛的应用前景。
位移法—位移法的典型方程和计算实例(建筑力学)
i
18.94kN m
i
2
i
3.158
M CD 6i
18.95kN m
i
3 21.05
M BD i
20 35.79kN m
4
i
作M图,如图示
位移法
位移法计算步骤归纳如下
(1)确定基本未知量。在原结构上加入附加约束,得到
衡条件求出杆端剪力。
M
B
FQAB
M
A
0
2.5 4 2 20
kN 0
4
0
FQBA
2.5 4 2 20
kN 10kN
4
位移法
同理,取杆件BC,由平衡条件得
FQCB FQBC 10kN
取杆件BD,由平衡条件得
FQDB FQBD 7.5kN
1.5i1 0.9375i 2 15 0
1
3.16
i
2
21.05
i
位移法
(6)作M图
利用叠加公式 M M1Z1 M 2 Z 2 M 计算杆端弯矩
3.158 3 21.05
M AC 2i
i
25.26kN m
i
2
i
3.158 3 21.05
k211 k22 2 F2 0
位移法
(3)求系数和自由项
k11=4i +6 i=10 i
k12= -1.5 i =k21
k12= -1.5 i
k22 0.75i 0.1875 i 0.9375 i
位移法
F1 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
n
n
rijZj , 为 消 去 该 处 的 约 束 力 , 令 : R iP rijZj=0即 可 。 写 成 方 程 组 的 形 式 为 :
j 1
j 1
r11Z1 r12Z2 r1n Zn R1P 0
r21
Z1
r22Z2
r2n
Zn
R2P
0
rn1Z1 rn2 Z2 rnnZn RnP 0
这就是位移法的典型方程。
R2P +
MP图
r11R1 A
r2R12A
+
rr2111AArr12
2B 2B
R1 R2
r12B r22B
rr2111AArr1222B BR R12PP00 这就是位移法方程,解出θA,θB
5)ri j的求法
2i 4i
r11 8i r212i
2i
M
图
1
4i 4i 2i r12 2i 3ir22 11i
2i
M
图
2
求r11,r12的研究对象
求r21,r22的研究对象
6)弯矩图的作法
qL2/12
q
P R1P
PL/8
R2P
MP图
++
r11R1 A
r2R12A
+
r12B r22B
即 M M P M 1A M 2B
qL2/12
q
P R1P
PL/8
R2P
4i
+ A•
MP图
2i + B•
2i
r11
r21
2i
M
图
1
4i
4i
r12
r22
3i
2i
M
图
2
二、有侧移刚架的弯矩图作法
PA
B
C
θB
ΔCH
D
E
变形图
1)位移法变量:θB ,ΔCH
2)为使结构各杆在荷载作用下的弯矩不相互传递, 需施加两种约束。
附加刚臂 和 附加支杆--------先作修改
PA
B
附加刚臂
C
P
AB
D
E
E D
附加支杆
0
0
R1P 0
图 。 然 后 , 使 第 i个 变 量 有 单 位 的 位 移 ( 其 它 变 量 仍 被 约 束 ) , 作 M 出 i 图 , i1,2,,n。 由
叠 加 原 理 , 当 n个 变 量 都 产 生 各 自 实 际 的 位 移 ( 角 度 或 侧 移 ) 时 , 在 第 i个 变 量 处 产 生 的 力 为 :
位移法典型方程计算举例
3、求解思路:
“先修改,后复原”
1)位移法变量 A,B
A
B
2)附加2个刚臂,使结点不能转动----各杆弯矩不能相互传递 PL/8
qL2/12
R1P
R2P
R1P,R2P怎么求?
MP图
3)如何消掉附加的刚臂约束?
若令 R1= - R1P、R2= - R2P
P
PL/8
qL2/12
r21
2i
M
图
1
6i/L
r22
r12
3i/L 6i/L
M
图
2
求r11,r12的研究对象
求r21,r22的研究对象
5)弯矩图的作法
M M PM 1 BM 2 CH
P
R1P
R2P
4i θB·
+ MP图
+ △CH·
3i
3i
2i 6i/L
r12
3i/L 6i/L
三、小结
超静定结构
确定位移法变量
刚结点转角,结点线位移
五、位移法的计步骤
1. 确定位移法变量 2. 作MP图,求出R1P、R2P 3 .作 M 1 、 M 2 图r , 1, 1r2, 1 求 r1, 2r22
4.写出位移法方,程 并求解
rr2111ZZ11rr1222ZZ22R R12PP00
5.依 MM PM 1Z1M 2Z2作出弯矩图
六、位移法计算应注意的问题
R1 R2
如果在C处附加支杆, 在B结点施加力矩使得B结点转角为θB
r11B
r21B
反之,如果在B处附加刚臂,
在C结点施加力使得C结点水平位移为△CH
叠加这两种情况:
a)力的叠加
r11 Br12CH r21 Br22CH
b)位移的叠加
r22 CH r1 2 CH
叠加后,B结点的转角为θB,C结点的水平位移为△CH
等价
附加刚臂和支杆约束 结点没有位移发生
各杆弯矩不相互传递
“复原过程”
MP图 叠
作各杆在各自荷载 作用下得弯矩图
“修改过程”
加
后 约
确定约束力RiP
束 消
在结点处反作用约束力 RiP
除
Mi 图
分别作结构在-RiP作用下
的弯矩图,i=1,2,…
四、位移法的典型方程
一 般 地 , 设 结 构 有 n个 位 移 法 变 量 Z1,Z2,,Zn, 需 附 加 n个 约 束 ( 刚 臂 或 支 杆 ) 作 出 M P
P AB R1P
E D
MP图
R2P
++
+
r1R11 B
R2 r21B
r22 CH r1 2 CH
满足下列方程,就消去了施加的2个约束
r11Br12 CH R 1
r21Br22 CH R 2
rr2111B Brr1222 C CH H R R12PP00
4)ri j的求法
3i
4i
3i r11
求R1P的研究对象
P
R1P
R2P
VAD
VBE
求R2P的研究对象
3)如何消掉附加的约束?
PA
B
C
若令
R1= - R1P、R2= - R2P 仍然使用叠加法
D
E
P AB R1P
E
=D
MP图
R2P
+
R2 R1
继续使用叠加法
同样的问题是:
每种情况下两个结点都发生位移,相
互关联,无法作出弯矩图。
=
+
R2 R1
七、计算举例
例题1 8 kN/m
A
B
C 4m
2m D 4m E EI=常数
16 kN 16 kNm
等效体系及变形图
例题1
16 kN
解:1)位移法变量:θC和ΔCH B
C
2)附加约束作MP图,并
16 kNm
求R1P ,R2P
8 kNm
R1P=8 kNm
0
R2P=0
r11A
r21A
反之,如果在A处附加刚臂, 在B结点施加力矩使得B结点转角为θB
r12 B r22B
如果叠加这两种情况:
1)结点A的转角为θA,结点B的转角为θB
R1
R2
2) 在 A处的约r束 11A力 r12: B R1
在 B处的约r2 束 1A力 r22: B R2
P
PL/8
qL2/12
R1P q
1. 位移法过程中,判断一个杆件有无弯矩的方法是: 1)该杆有无杆端转角 2)该杆有无杆端相对侧移 3)该杆上有无荷载作用
2. 各图中R1P,r11,r12 的方向应保持一致画出 R2P,r21,r22的方向应保持一致画出
3. r11,r22 均为大于零的值,即施加的单位力与发 生位移的方向协调一致。
R1P q
R2P +
R1
R2
MP图 叠加后附加刚臂的约束没了,
叠加后内力就是原结构的内力
4)如何作R1,R2作用下得弯矩图? 与力法类似,依然使用叠加法:
问题是: 每种情况下两个刚结点都发生转动, 相互关联,无法作出弯矩图。
R1
R2
=
R1 +
R2
如果在B处附加刚臂, 在A结点施加力矩使得A结点转角为θA