弹塑性力学10-6梁模型计算圆板和环板的塑形极限载荷(精)
合集下载
结构塑性分析的极限荷
刚塑性模型
线性强化模型
各类简化曲线模型
理想弹塑性模型
加载时,材料的 曲线分弹性I、塑性II两个阶段。
材料的拉压性能相同
理想弹塑性材料假定:
卸载时,卸载点在I、II两个阶段上是不同的。 理想弹塑性假定,材料加载时呈弹塑性,卸载时呈弹性。
2
3
4
1
第二节 极限弯矩和塑性铰 纯弯曲 矩形截面梁
1)限定给结构加载的方式为按比例加载
结构的范围内。并假定: 材料为理想弹塑性材料。 轴力和剪力对极限荷载的影响可以 忽略不计。
2)限定仅在梁、刚架一类以弯曲变形为主的
1
2
平衡条件 在极限状态下,结构的整体、或任一局 部都满足静力平衡条件。 在极限状态下,结构的任一截面上的 弯矩值都不能超过截面的极限弯矩。
即
成立
证毕。
2.唯一性定理(单值定理): 结构的极限荷载是唯一的。
证明:
。根据极限荷载应同时满足既是可破坏荷载又是可接受荷载,先设
为可破坏荷载,
为可接受荷载,由基本定理知应有:
和
(a)
为可破坏荷载,
为可接受荷载,
再设
(b)
(a)、(b)两式应同时成立,否则, 、 均为极限荷载的假设不能成立。而使该两不等式同时成立的条件是:
当截面达到弹性极限状态外力偶继续增大M>Ms以后,截面上的应变分布仍与截面高度呈线性关系,即平截面假定仍然适用,见图14-2-1(c)。但截面上的应力分布不再与截面高度保持线性关系。
Hale Waihona Puke (3)塑性铰概念当截面出现并不断扩大塑性区进入弹塑性发展阶段,直到整个截面被塑性区充满的塑性极限状态止,截面上应变的发展始终与截面高度成线性关系。即尽管这一阶段塑性区上的应力停止在屈服应力值上,但应变仍与弹性核部分的应变分布斜直线共线发展。因此,当截面达到塑性极限状态时,比弹性极限状态的应变值显著增大,由此产生的是该截面两侧无限靠近的两个截面绕中性轴发生相对的转动的相对角位移效应。
弹塑性力学10-结构的塑性极限分析与安定性ppt课件
We= P = Pl
Wi = Mp + 2Mp = 3Mp
由We= Wi 得
Pl+ = 3Mp/l 上限解与下限解相同,该
结果即为完全解。
Pl- = Pl+ = Pl = 3Mp/l
➢ 注意——在确定静力容许的内力场时,若 能考虑到形成破坏机构所需的塑性铰数,
则得到的解答可以接近或等于完全解。若
确定的弯矩绝对值等于Mp的截面数小于形 成破坏机构的塑性铰数,此时应检查其余
10-3 梁的极限分析
【例1】如图所示简支梁,梁截 面的塑性极限弯矩为Mp。由 于在静定梁中无多余约束, 其内力由静力平衡条件唯一 确定,即建立起内力(弯矩) 与外载荷的关系式。而且, 在静定梁中仅需要一个截面 达到全塑性状态(即形成一 个塑性铰)该梁就可成为破 坏机构。取弯矩图中仅有的
一个最大值,并令其等于Mp 就可得到极限载荷的完全解。
第10章 结构的塑性极限分析 与安定性
.
第10章 结构的塑性极限分析与安定性
1. 梁的弹塑性弯曲 2. 塑性极限分析的定理与方法 3. 梁的极限分析 4. 刚架的极限分析 5. 轴对称圆板的极限分析 6. 结构的安定性
➢ 弹塑性结构的塑性极限载荷是表征结构承载能力 的最大值。按塑性极限承载能力进行结构设计, 不仅可以充分发挥材料的塑性性能,而且还可以 得到反映结构真实安全裕度的参数。
➢ 刚架极限分析的方法有静力法、机动法以 及机构叠加法。
➢静力法
(1)先求各截面的控制弯矩,即建立弯矩与 外载的关系;
(2)令控制弯矩中有( n + 1)处达到塑性 极限弯矩,由此建立起静力容许的内力场, 并求其对应的载荷(即下限解);
(3)如果内力场为静力容许,且形成破坏机 构,则此下限解即为完全解。
Wi = Mp + 2Mp = 3Mp
由We= Wi 得
Pl+ = 3Mp/l 上限解与下限解相同,该
结果即为完全解。
Pl- = Pl+ = Pl = 3Mp/l
➢ 注意——在确定静力容许的内力场时,若 能考虑到形成破坏机构所需的塑性铰数,
则得到的解答可以接近或等于完全解。若
确定的弯矩绝对值等于Mp的截面数小于形 成破坏机构的塑性铰数,此时应检查其余
10-3 梁的极限分析
【例1】如图所示简支梁,梁截 面的塑性极限弯矩为Mp。由 于在静定梁中无多余约束, 其内力由静力平衡条件唯一 确定,即建立起内力(弯矩) 与外载荷的关系式。而且, 在静定梁中仅需要一个截面 达到全塑性状态(即形成一 个塑性铰)该梁就可成为破 坏机构。取弯矩图中仅有的
一个最大值,并令其等于Mp 就可得到极限载荷的完全解。
第10章 结构的塑性极限分析 与安定性
.
第10章 结构的塑性极限分析与安定性
1. 梁的弹塑性弯曲 2. 塑性极限分析的定理与方法 3. 梁的极限分析 4. 刚架的极限分析 5. 轴对称圆板的极限分析 6. 结构的安定性
➢ 弹塑性结构的塑性极限载荷是表征结构承载能力 的最大值。按塑性极限承载能力进行结构设计, 不仅可以充分发挥材料的塑性性能,而且还可以 得到反映结构真实安全裕度的参数。
➢ 刚架极限分析的方法有静力法、机动法以 及机构叠加法。
➢静力法
(1)先求各截面的控制弯矩,即建立弯矩与 外载的关系;
(2)令控制弯矩中有( n + 1)处达到塑性 极限弯矩,由此建立起静力容许的内力场, 并求其对应的载荷(即下限解);
(3)如果内力场为静力容许,且形成破坏机 构,则此下限解即为完全解。
弹塑性变形与极限载荷分析
弹塑性变形与极限载荷分析
14-3 超静定桁架的极限载荷
图示的超静定结构,由刚性梁 BE 与各杆的横截面面积分 A1 A3 A , A2 2 A 。各杆 别为 A1、A2、A3 的杆1、杆2、杆3 组成,且, 的材料相同,其拉、压屈服强度均为 s 。试求该结构的极限载荷。 解:一次超静定结构,有两根 杆屈服才进入塑性极限状态。 故有三种可能的极限状态。 1)设杆1与杆2已屈服,杆 3未屈服。此时,载荷 F 有使 刚性梁绕E点转动的趋势。 ME 0 , MD 0 例
E E ( s ) s
( s ) ( s ) (14 - 5)
E E
弹塑性变形与极限载荷分析
14-2 应力-应变关系曲线的简化 1)理想弹塑性材料
2)理想刚塑性材料 3)线性强化材料 4)幂函数强化材料
s s
弹塑性变形与极限载荷分析
14-1 弹塑性变形与极限载荷法概念 2)极限载荷法 图中所示的一次超静定结构,各杆的横截面相同并均为理想 弹塑性材料,a >b 。设各杆均处于弹形变形状态时,杆1、杆2、 杆 3 的内力分别为 FN 、FN 、FN ,可以分析得到,在外力一定 FN1 FN 2 FN 3 。 时, 当外力增大使杆3屈服时,杆3已失去承载能力。由于杆2和杆1 尚未屈服,它们组成一静定结构,仍可继续承受增加的载荷。
m
(14 - 6)
弹塑性变形与极限载荷分析
14-3 超静定桁架的极限载荷
由对 14-1 节中一次超静定桁架的分析可知,当其中一根杆 (多余约束的杆)屈服时,便变为静定杆件结构。此时增大载荷, 若再有一根杆屈服,结构便处于塑性极限状态。以此类推,对于 n 次超静定桁架,如果有 n+1 根杆屈服,该结构便处于塑性极限 状态。
结构的塑性极限分析
塑性极限分析的完全解:
满足平衡条件、极限条件、破坏机构条件的解。
11
二.虚功原理和虚功率原理
❖ 虚功原理:在外力作用下处于平衡的变形体,
若给物体一微小的虚变形(位移)。则外力的
虚功必等于应力的虚功(物体内储存的虚应变
能)。
fi ui*dV
Fiui*dS
s
ij
* ij
dV
V
ST
V
Fi ST
• 特点:
– 塑性铰的存在是由于该截面 上的弯矩等于塑性极限弯矩; 故不能传递大于塑性极限弯 矩的弯矩。
– 塑性铰是单向铰,梁截面的 转动方向与塑性极限弯矩的 方向一致。否则将使塑性铰 消失。
P
x
l 6
o
x
l/2 l/2 z
P x
l/2 l/2 z
7
➢ 例题:悬臂梁在自由端受集中力,求弹性极限载荷、塑 性极限载荷、弹塑性分界线。
V
ST
V
ST
ij
1 2
ui x j
u j xi
s ij s ji
V
f i ui dV
V
(s ij ui ) dV
x j
V
s
x
ij j
f
i
ui
dV
s ij
V
ui x j
dV s ij ijdV
V
s ij ij
1 2
s
ij
ui x j
s
ji
u j xi
体力为零时:
Fiui*dS
12
3h2 4he2
o
x
l/2 l/2
MP
bh2 4
ss
Mp3ຫໍສະໝຸດ e 2塑性极限弯矩z ss
满足平衡条件、极限条件、破坏机构条件的解。
11
二.虚功原理和虚功率原理
❖ 虚功原理:在外力作用下处于平衡的变形体,
若给物体一微小的虚变形(位移)。则外力的
虚功必等于应力的虚功(物体内储存的虚应变
能)。
fi ui*dV
Fiui*dS
s
ij
* ij
dV
V
ST
V
Fi ST
• 特点:
– 塑性铰的存在是由于该截面 上的弯矩等于塑性极限弯矩; 故不能传递大于塑性极限弯 矩的弯矩。
– 塑性铰是单向铰,梁截面的 转动方向与塑性极限弯矩的 方向一致。否则将使塑性铰 消失。
P
x
l 6
o
x
l/2 l/2 z
P x
l/2 l/2 z
7
➢ 例题:悬臂梁在自由端受集中力,求弹性极限载荷、塑 性极限载荷、弹塑性分界线。
V
ST
V
ST
ij
1 2
ui x j
u j xi
s ij s ji
V
f i ui dV
V
(s ij ui ) dV
x j
V
s
x
ij j
f
i
ui
dV
s ij
V
ui x j
dV s ij ijdV
V
s ij ij
1 2
s
ij
ui x j
s
ji
u j xi
体力为零时:
Fiui*dS
12
3h2 4he2
o
x
l/2 l/2
MP
bh2 4
ss
Mp3ຫໍສະໝຸດ e 2塑性极限弯矩z ss
弹塑性力学10-6梁模型计算圆板和环板的塑形极限载荷(精)
例题1:边长为 a 的正方形薄板,一边固支、两边简支,自由边中点A受集 中载荷 P 作用,板的塑性极限弯矩为: Mp ,求塑性极限载荷。 D
b
b
C
a
h
E A B
解:设A点的挠度为d
ABC与ACD的相对转角为q :
a
q
d
AC
cota cot b 5
j d
a
d
2 AC
j
d
ACD与CD的相对转角为j:
dr
梁计算模型
板 x o r
q(r) r
o x
m
Mx Qx
m
q(x) 极限条件:
2rMr 2rQr 2Mq
2rq(r) Mmax Mp
若梁和圆板的边界条 件在形式上相同,可 通过求解变量转换后 梁的问题得到圆板的 解答。
四、 梁模型计算圆板和环板的塑性极限载荷的步骤
1. 结构转换 o
r
o
解:
o
z
r
r a
a
z
2rM r 2rM p r r 2rq 2 3
m= 2Mp
qr 2 Mr M p 6
Mr
r a
qa2 M p M p M p 6
ql 12
Mp a2
简支圆板:
Mr
r a
0
ql 6
Mp a2
例题2:半径为 a 的简支环板,内半径为 b ,受均布载荷 q 作用,圆板单 位塑性极限弯矩为: Mp ,求塑性极限载荷。 2rq q
i 1
ai bi
( n 2) 2n 2 n
Pl M P cota i cot b i
弹塑性力学第10章

第十章 简单弹塑性问题
• • • • • • §10-1 梁的弹塑性弯曲 §10-2 压杆的塑性失稳 *§10-3 圆杆的弹塑性扭转 §10-4 理想弹塑性材料的厚壁球壳 §10-5 理想弹塑性材料的厚壁圆筒 §10-6 关于塑性力学的解题方法
第十章 简单弹塑性问题
• 前面几章介绍了塑性力学的基本理 论,利用这些基本理论就可以求解塑性力 学问题。由于塑性力学基本方程的复杂 性,一般的弹塑性力学边值问题的求解 是相当困难的。但是,对于未知量较少 和边界条件较简单的弹塑性问题,有可 能克服数学上的因难而获得解析解。本 章就介绍这类简单的弹塑性问题,并通 过它们说明塑性力学解题的方法和特点。
s
ys
式(10—3)自动满足
h/2
h / 2
(10—4)
理想弹弹性弯曲应力分布
h/2 ys
M 2
ys
0
y b y dy 2 s
2
yb y dy
M 2
s
ys
ys
0
y b y dy 2 s
2
h/2
ys
yb y dy
式(10—5)确定了弯 矩M和弹性区高度ys的 关系
§10-1 梁的弹塑性弯曲
• • • • 1.假设和屈服条件 2.梁的纯弯曲 3.梁的横力弯曲 4.梁的弹塑性挠度
1.假设和屈服条件
• 这里研究的梁其横截面具有两个对称轴, 载荷作用于纵向对称平面内。仍采用材料力学 中梁弯曲理论的一般假设: ①变形前垂直于梁轴的平面,在变形后仍保持 为垂直于弯曲梁轴的平面,即平截面假设; ②不计各层间的相互挤压; ③小变形,即挠度比横截面的尺寸小得多。 ④梁长比横向尺寸大得多。
•
• • • • • • §10-1 梁的弹塑性弯曲 §10-2 压杆的塑性失稳 *§10-3 圆杆的弹塑性扭转 §10-4 理想弹塑性材料的厚壁球壳 §10-5 理想弹塑性材料的厚壁圆筒 §10-6 关于塑性力学的解题方法
第十章 简单弹塑性问题
• 前面几章介绍了塑性力学的基本理 论,利用这些基本理论就可以求解塑性力 学问题。由于塑性力学基本方程的复杂 性,一般的弹塑性力学边值问题的求解 是相当困难的。但是,对于未知量较少 和边界条件较简单的弹塑性问题,有可 能克服数学上的因难而获得解析解。本 章就介绍这类简单的弹塑性问题,并通 过它们说明塑性力学解题的方法和特点。
s
ys
式(10—3)自动满足
h/2
h / 2
(10—4)
理想弹弹性弯曲应力分布
h/2 ys
M 2
ys
0
y b y dy 2 s
2
yb y dy
M 2
s
ys
ys
0
y b y dy 2 s
2
h/2
ys
yb y dy
式(10—5)确定了弯 矩M和弹性区高度ys的 关系
§10-1 梁的弹塑性弯曲
• • • • 1.假设和屈服条件 2.梁的纯弯曲 3.梁的横力弯曲 4.梁的弹塑性挠度
1.假设和屈服条件
• 这里研究的梁其横截面具有两个对称轴, 载荷作用于纵向对称平面内。仍采用材料力学 中梁弯曲理论的一般假设: ①变形前垂直于梁轴的平面,在变形后仍保持 为垂直于弯曲梁轴的平面,即平截面假设; ②不计各层间的相互挤压; ③小变形,即挠度比横截面的尺寸小得多。 ④梁长比横向尺寸大得多。
•
第14章 弹塑性变形与极限载荷分析

x
d dx
d x S S dx d S G x GS
S
d dx
s
1 3
dx
(14 - 9)
3 6T G 4 R π s 圆轴弹塑性扭转变形公式
第14章 弹塑性变形与极限载荷分析
14-4 圆轴的弹塑性扭转 1)极限扭矩 残余应力
第14章 弹塑性变形与极限载荷分析
14-3 超静定桁架的极限载荷
图示的超静定结构,由刚性梁 BE 与各杆的横截面面积分 A 别为 A1、A2、A3 的杆1、杆2、杆3 组成,且, 1 A3 A , A2 2 A 。各杆 的材料相同,其拉、压屈服强度均为 s 。试求该结构的极限载荷。 解:一次超静定结构,有两根 杆屈服才进入塑性极限状态。 故有三种可能的极限状态。 1)设杆1与杆2已屈服,杆 3未屈服。此时,载荷 F 有使 刚性梁绕E点转动的趋势。 ME 0 , MD 0
( s ) ( s ) (14 - 3)
第14章 弹塑性变形与极限载荷分析
14-2 应力-应变关系曲线的简化 1)理想弹塑性材料 2)理想刚塑性材料
0 s
( p 0) ( p 0) (14 - 4)
p 为塑性应变
第14章 弹塑性变形与极限载荷分析
第14章 弹塑性变形与极限载荷分析
14-4 圆轴的弹塑性扭转 残余应力
即
1)极限扭矩 2)残余应力 如果卸载开始时横截面的扭矩为 T0 ,完全卸载后扭矩为零, DT ,那么 T0 T
D x
0
Ip
这样,卸载后横截面各点切应力为 T0 (0 s ) s I s p x s T0 ( s R) Ip (14 - 11)
弹塑性力学之结构的塑性极限分析
25
塑性极限载荷
4"6
确定塑性区位置
截面的上下两塑性区相连,使 跨中左右两截面产生像结构
・特点:
-塑性较的存在是由于该截面 上的弯矩等于塑性极限弯矩; 故不能传递大于塑性极限弯 矩的弯矩。
<]
ax(x9z\ay=az= rxy=ryz= rzx=0
♦:・小挠度假设:在梁达到塑性极限状态瞬 间之前,挠度与横截面尺寸相比为一微 小量,可用变形前梁的尺寸进行计算。
二.弹性阶段
—
P1
6M
♦ Mises屈服条件:
xmax
bh2
弹性极限弯矩
二
2bh2
弹性极限载荷
三.弹塑性阶段(约束塑性变形阶段)
>Mp塑性区扩展
第十章结构的塑性极限分析
矗塑性极限分析定理和方法
❖梁的极限分析❖圆板的极限分析
❖梁模型法计算圆板和环板的塑性极限 載荷
§10-1梁的弹塑性弯曲
1.基本假定
•:•平截面假设:在变形过程中,变形 前为平面的横截面,变形后仍保持 为平面,且与变形后梁的轴线垂直。
z5=— P
・纵向纤维互不挤压:不计挤压应力, 横截面上只有正应力。
heh/2
陆=2町(yxzdz+ 2町aszdz
0he
陆
0叽he
“Me
Ms=—-
s2
h2
弹塑性区交界线:
h/2
(Jszdz
陆=
£
弹塑性区交界线:饥=±丄3
h~2\
<]
►P(lΒιβλιοθήκη 2x)2ALPl/4
四.全塑性阶段
X—6
x = 0
塑性极限弯矩
n
A
塑性极限载荷
4"6
确定塑性区位置
截面的上下两塑性区相连,使 跨中左右两截面产生像结构
・特点:
-塑性较的存在是由于该截面 上的弯矩等于塑性极限弯矩; 故不能传递大于塑性极限弯 矩的弯矩。
<]
ax(x9z\ay=az= rxy=ryz= rzx=0
♦:・小挠度假设:在梁达到塑性极限状态瞬 间之前,挠度与横截面尺寸相比为一微 小量,可用变形前梁的尺寸进行计算。
二.弹性阶段
—
P1
6M
♦ Mises屈服条件:
xmax
bh2
弹性极限弯矩
二
2bh2
弹性极限载荷
三.弹塑性阶段(约束塑性变形阶段)
>Mp塑性区扩展
第十章结构的塑性极限分析
矗塑性极限分析定理和方法
❖梁的极限分析❖圆板的极限分析
❖梁模型法计算圆板和环板的塑性极限 載荷
§10-1梁的弹塑性弯曲
1.基本假定
•:•平截面假设:在变形过程中,变形 前为平面的横截面,变形后仍保持 为平面,且与变形后梁的轴线垂直。
z5=— P
・纵向纤维互不挤压:不计挤压应力, 横截面上只有正应力。
heh/2
陆=2町(yxzdz+ 2町aszdz
0he
陆
0叽he
“Me
Ms=—-
s2
h2
弹塑性区交界线:
h/2
(Jszdz
陆=
£
弹塑性区交界线:饥=±丄3
h~2\
<]
►P(lΒιβλιοθήκη 2x)2ALPl/4
四.全塑性阶段
X—6
x = 0
塑性极限弯矩
n
A
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
r
o b
解:
o
z
r
b r a
z
a
m= 2Mp
2rM r 2 r b M p
2 r b r b 2rrq 2bq r b 2bq
b r b r 2b Mr 1 M p q r 6r
2
2
2
3
r
o
解:
o
z
r
r a
a
z
2rM r 2rM p r r 2rq 2 3
m= 2Mp
qr 2 Mr M p 6
Mr
r a
qa2 M p M p M 支圆板:
Mr
r a
0
ql 6
Mp a2
例题2:半径为 a 的简支环板,内半径为 b ,受均布载荷 q 作用,圆板单 位塑性极限弯矩为: Mp ,求塑性极限载荷。 2rq q
i 1
ai bi
( n 2) 2n 2 n
Pl M P cota i cot b i
i 1
n
正多边形(集中力作用在板中心): a i b i
( n 2) 2n 2 n
Pl M P 2 tan
i 1
n
n
Pl 2nM P tan
r
o b
解:
o
b c a
z
a
m= 2Mp
z
2 r b M p brc 2rM r 2 r b M p P r c c r a
Mr
r a
0
Pl
2 a b M p ac
10-7 多边形板的塑性极限载荷(机动法)
一、薄板的破坏机构
(2)塑性铰线在板内相交。
(3)终止在自由边界上的塑性铰线,其延长线交于相邻两板块转 动轴的交点上。该交点可能位于无穷远处。 (4)集中力作用下,塑性铰线交于载荷作用点。
二、周边简支的多边形板 在O 处受集中力P 作用
A O C a
ai b i
O
OA=li B b
P
d
d
破坏机构:角锥体
q1
方向与外载荷在梁中产生的弯矩方向相反
梁计算模型上: 2r Mr
3. 求塑性极限载荷
r=a 处简支:M=0
(梁右端边界条件)
2a Mr =0
r=a 处固支:M=- Mp
2a Mr = - 2a Mp
例题1:半径为 a 的固支圆板,受均布载荷 q 作用,圆板单位塑性极限弯 矩为: Mp ,求塑性极限载荷。 2rq q
M(x)+dM(x)
Q(x)+dQ(x)
三、板的平衡方程
dQ( x ) q( x ) dx dM( x ) Q( x ) m dx q(x) 梁
d rQr qr dr
d ( rM r ) rQr Mq dr
d 2rQr 2qr dr d ( 2rM r ) 2rQr 2Mq
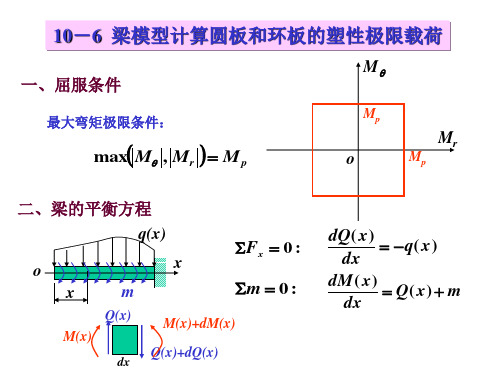
10-6 梁模型计算圆板和环板的塑性极限载荷
一、屈服条件
最大弯矩极限条件:
Mq
Mp
Mq , Mr M p max
二、梁的平衡方程 q(x) o
o
Mp
Mr
x x
M(x)
dx
Fx 0 :
m 0 :
m
Q(x)
dQ( x ) q( x ) dx dM( x ) Q( x ) m dx
q2
qi :相对转角
tanq 1 tanq 2
q i q1 q 2
d
li
d
a
a li tana i b li tan b i
d
b
qi
cota i cot b i
塑性极限弯矩:MP
在塑性铰线 li 上做的内力功:
M p l iq i
qi
d
li
cota i cot b i
1. 基本假设: 1) 在薄板最大弯矩处形成塑性铰线(直线段)。 2) 沿塑性铰线的单位长度上作用着塑性极限弯矩Mp ,不计扭矩 和剪力的作用。 3) 不计弹性变形。 2. 破坏机构的确定规则: (1)薄板的破坏机构由若干板块组成,板内塑性铰线是相邻两板 块的转动轴。 有塑性铰线的固支边、简支边、过支承板中心的线都是板块的 转动轴。 板块数目等于支承边界的数目。
dr
梁计算模型
板 x o r
q(r) r
o x
m
Mx Qx
m
q(x) 极限条件:
2rMr 2rQr 2Mq
2rq(r) Mmax Mp
若梁和圆板的边界条 件在形式上相同,可 通过求解变量转换后 梁的问题得到圆板的 解答。
四、 梁模型计算圆板和环板的塑性极限载荷的步骤
1. 结构转换 o
n
n 3 : Pl 10.39M P n 4 : Pl 8M P n 5 : Pl 7.27M P n 6 : Pl 6.93M P
Mr
r a
0 ql
r a
a ba 2b
6M p
固支环板: Mr
M p q 6 M p 2a b l a b2 a 2b
例题3:半径为 a 的简支环板,内半径为 b ,在半径为 c 的圆周上作用线 分布载荷 p,总值为 P ,单位塑性极限弯矩为: Mp ,求塑性极 限载荷。 P p p c r
r
r
z
圆板的半径
o
z
r
r
梁计算模型的跨度 (只研究右半部) 梁计算模型的左端为自由端 右端与板的支承形式相同。 梁计算模型上的坐标原点 坐标为 r 的梁截面
外边界支承圆板
圆板的对称轴 距圆板的对称轴为 r 处的圆截面
2. 载荷与内力转换
圆板单位面积上的载荷q(r)
圆板某一半径上的载荷P 圆板中的环向弯矩: Mq = Mp (极限条件) 圆板中 r 处的弯矩Mr 梁计算模型上的分布载荷 2rq(r) 梁计算模型相应位置处的集中力 P 梁计算模型上的附加均布弯矩 2 Mp
M p liq i M Pd cota i cot b i
n 多边形,总的内力功Wi :
Wi M p l iq i M Pd cota i cot b i
i 1 i 1
n
n
外力P 做的外力功We :
We Pd
n
We Wi
正多边形:
Pl M P cota i cot b i