弹塑性力学讲义本构关系
合集下载
弹塑性本构关系简介

松比)。
塑性材料受外部作用的反应和变形的历史有关(可称为历 史相关性或路径相关性),本构关系应写成增量关系。
应力空间表述的弹塑性本构关系
韧性(塑性)金属材料单向拉伸试验曲线如下 图示意
强度极限
b
屈服上限
L y
U y
e
屈服下限
弹性极限
强化段
软化段 卸载
残余变形
弹性变形
y
y
卸载、反向加载 包辛格效应
屈服面随内变量改变的规律称强化规律。由 材料试验的资料可建立各种强化模型,目前广 泛采用的有:等向强化;随动强化两种模型。
等 向 强
初始屈服面
2
B
f 0(ij ) 0 B
2
C A o1
化
o A 1
o
1
C
D
随
弹性
动
f 0 (ij ) 0
强 化
后继屈服面
f
( ij
,
p ij
,
k)
0
等向强化认为屈服面形状不变,只是作均匀
称后继屈服面,f
(
ij
,
p ij
,
k
)
0
。
如果一点应力的 f (ij ,ipj,,则k)此 点0 处于弹性状态,如
果
f (,ij则,处ipj ,于k)塑 0性状态。
式变张中形量的为i量j间应。存ip力j在张如和ip量j 下k,关统系称为ipj为塑内性变应量ip力j 。张其D量i中j,klkkp与l为塑标ipj 性志应永变久
d ij
Dt ijkl
d
kl
式中 Ditjk为l 切线弹性张量,形式上仍可表为
Dt ijkl
第11章-弹塑性力学--本构关系
xy c41 x c42 y c43 z c44 xy c45 yz c46 zx yz c51 x c52 y c53 z c54 xy c55 yz c56 zx zx c61 x c62 y c63 z c64 xy c65 yz c66 zx
xy c41 x c42 y c43 z
y y
图4-2
(a)
z
x
x
z
现在引进坐标系 Ox’y’z’, 原坐 标系 Oxyz 绕 y 轴转动 1800 后可与之重合 (图4-2)
新旧坐标轴间的方向余弦
l11 l33 cos180
1 0 0 1 l22 cos 0 1 0 0 l21 l31 l12 l32 l13 l23 cos 90 0
(11-13)
平面应力问题 用应变分量表示 应力分量
E y x 1 2 x E (11-14) y y x 1 2 G
ij ije 2 ij
(11-3’)
以上证明了各向同性的均匀弹性体的弹性常数只有 两个。
现在考虑一种物体各边平行于坐标轴的特殊情况,并 由此导出工程上常用的弹性常数和广义胡克定律。当物 体边界法线方向与 z 轴重合的两对边上有均匀的σz 作 用,其他边均为自由边时,则由材料力学知道
第11章 本构关系
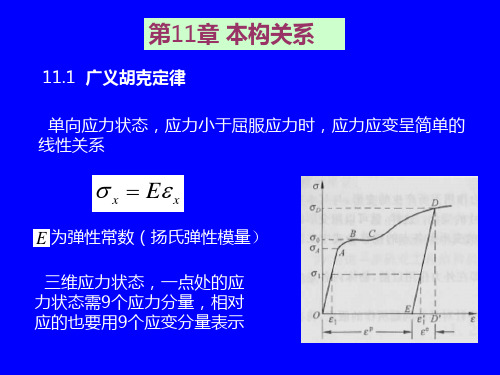
11.1 广义胡克定律 单向应力状态,应力小于屈服应力时,应力应变呈简单的 线性关系
x E x
E 为弹性常数(扬氏弹性模量)
三维应力状态,一点处的应 力状态需9个应力分量,相对 应的也要用9个应变分量表示
xy c41 x c42 y c43 z
y y
图4-2
(a)
z
x
x
z
现在引进坐标系 Ox’y’z’, 原坐 标系 Oxyz 绕 y 轴转动 1800 后可与之重合 (图4-2)
新旧坐标轴间的方向余弦
l11 l33 cos180
1 0 0 1 l22 cos 0 1 0 0 l21 l31 l12 l32 l13 l23 cos 90 0
(11-13)
平面应力问题 用应变分量表示 应力分量
E y x 1 2 x E (11-14) y y x 1 2 G
ij ije 2 ij
(11-3’)
以上证明了各向同性的均匀弹性体的弹性常数只有 两个。
现在考虑一种物体各边平行于坐标轴的特殊情况,并 由此导出工程上常用的弹性常数和广义胡克定律。当物 体边界法线方向与 z 轴重合的两对边上有均匀的σz 作 用,其他边均为自由边时,则由材料力学知道
第11章 本构关系
11.1 广义胡克定律 单向应力状态,应力小于屈服应力时,应力应变呈简单的 线性关系
x E x
E 为弹性常数(扬氏弹性模量)
三维应力状态,一点处的应 力状态需9个应力分量,相对 应的也要用9个应变分量表示
弹塑性力学第5章—塑性本构关系
3 2
sij
−
Cdε
p ij
sij −
Cdε
p ij
−σs = 0
C表征材料强化的大小,来自单向拉伸
5.3 后继屈服条件
1、等向强化模型
单向拉伸实验曲线中三个方向的塑性主应变为
ε1p
= ε p,
ε
p 2
=
ε
p 3
= − 1ε p
2
其中ε p为单向拉伸方向的塑性应变,由此得到等效塑性应变
( ) ( ) ( ) ε p =
4 3
J
′
2
=
2 9
⎡ ⎢⎣
ε1p
−
ε
p 2
2+
ε
p 2
−
ε
p 3
2+
ε
p 3
最大畸变能是材料屈服的原因
J2 = k2
J 2反映了材料的畸变能( U0d
=
J2 2G
)
( ) J2
=
1 2
sij sij
=
1 6
(σ1 − σ2 )2 + (σ2 − σ3 )2 + (σ3 − σ1)2
k 由实验确定,根据简单拉伸实验,在材料屈服时
[ ] J2
=1 6
(σ 0 − 0)2 + 0 + (0 −σ 0 )2
−0.8
屈服条件类似,主要区别是
−1.0
混凝土的抗压强度比抗拉强
−1.2
度高得多。
5.2 常用的屈服条件
5.2.3 混凝土的莫尔-库仑屈服条件
在实验基础上,提出线性化的莫尔-库仑屈服条件,σ
′
0
,
σ
弹塑性力学第四章弹性本构关系资料

产生的x方向应变:
产生的x方向应变:
叠加
产生的x方向应变:
同理:
剪应变:
物理方程:
说明:
1.方程表示了各向同性材料的应力与应 变的关系,称为广义Hooke定义。也称 为本构关系或物理方程。
2.方程组在线弹性条件下成立。
. 体积应变与体积弹性模量
令: 则: 令:
sm称为平均应力; q 称为体积应变
eij
1 2G
sij
(4.40)
因为 J1 0, J1' 0 ,所以以上六个式子中独立变量只有5个
因此应力偏张量形式的广义虎克定律,即
eij
1 2G
sij
em
1 3K
sm
(4.41)
用应变表示应力:
或: ✓ 各种弹性常数之间的关系
§4-2 线弹性体本构方程的一般表达式
弹性条件下,应力与应变有唯一确定的对应关系,三维 应力状态下,一点的应力取决于该点的应变状态,应力是应 变的函数(或应变是应力的函数) 6个应力分量可表述为6个应变分量的函数。
式(2)中的系数 有36个.
称为弹性常数,共
由均匀性假设,弹性体各点作用同样应力 时,必产生同样的应变,反之亦然.因此 为 常数,其数值由弹性体材料的性质而定.
式(2)推导过程未引用各向同性假设, 故可适用于极端各向异性体、正交各向异性体、 二维各向同性体以及各向同性体等.
式(2)可用矩阵表示
式(3)可用简写为 称为弹性矩阵.
三、. 弹性常数
1. 极端各向异性体:
物体内的任一点, 沿各个方向的性能都不相 同, 则称为极端各向异性体. (这种物体的材料极 少见)
即使在极端各向异性条件下, 式(2)中的36个 弹性常数也不是全部独立.
产生的x方向应变:
叠加
产生的x方向应变:
同理:
剪应变:
物理方程:
说明:
1.方程表示了各向同性材料的应力与应 变的关系,称为广义Hooke定义。也称 为本构关系或物理方程。
2.方程组在线弹性条件下成立。
. 体积应变与体积弹性模量
令: 则: 令:
sm称为平均应力; q 称为体积应变
eij
1 2G
sij
(4.40)
因为 J1 0, J1' 0 ,所以以上六个式子中独立变量只有5个
因此应力偏张量形式的广义虎克定律,即
eij
1 2G
sij
em
1 3K
sm
(4.41)
用应变表示应力:
或: ✓ 各种弹性常数之间的关系
§4-2 线弹性体本构方程的一般表达式
弹性条件下,应力与应变有唯一确定的对应关系,三维 应力状态下,一点的应力取决于该点的应变状态,应力是应 变的函数(或应变是应力的函数) 6个应力分量可表述为6个应变分量的函数。
式(2)中的系数 有36个.
称为弹性常数,共
由均匀性假设,弹性体各点作用同样应力 时,必产生同样的应变,反之亦然.因此 为 常数,其数值由弹性体材料的性质而定.
式(2)推导过程未引用各向同性假设, 故可适用于极端各向异性体、正交各向异性体、 二维各向同性体以及各向同性体等.
式(2)可用矩阵表示
式(3)可用简写为 称为弹性矩阵.
三、. 弹性常数
1. 极端各向异性体:
物体内的任一点, 沿各个方向的性能都不相 同, 则称为极端各向异性体. (这种物体的材料极 少见)
即使在极端各向异性条件下, 式(2)中的36个 弹性常数也不是全部独立.
弹塑性力学-弹塑性本构关系

此式限制了屈服面的形状: 对于任意应力状态,应力增量方向
与塑性应变向量之间所成的夹角不应 该大于90°
稳定材料的屈服面必须是凸的.
(a)满足稳定材 料的屈服面
ij
0 ij
(b) 不满足稳定 材料的屈服面
/2
2 塑性应变增量向量与屈服面法向平行
d 必p 与加载面的外法线
重合,否则总可以找到A0 使A0A·dεp≥0不成立(如右 图)。
的真实功与ij0起点无关;
Ñ d ipj ij ij 0
(2)附加应力功不符合功的 定义,并非真实功
i0j ij i0jdij0
-
应力循环中外载所作真实功 与附加应力功
(3)非真实物理功不能引用热力学定律;
(4)德鲁克公设的适用条件:
①ij0在塑性势面与屈服面
之内时,德鲁克公设成立;
d
p ij
d
ij
由应力空间中的屈服与应变空间中屈服面的转换关系,可得:
结合
-
D
ij
ij
dipj Ddipj
d
p ij
d
ij
可得:
d d
3.1.4 塑性位势理论与流动法则
与弹性位势理论相类似,Mises于1928年提出塑性
位势理论。他假设经过应力空间的任何一点M,必有
一塑性位势等势面存在,其数学表达式称为塑性位势
残余应力增量与塑性 应变增量存在关系:
dipj Ddipj
式中,D为弹性矩阵。 根据依留申公设,在 完成上述应变循环中, 外部功不为负,即
Ñ WI ijdij 0 i0j
只有在弹性应变时,上述WI=0。
根据Druker塑性公设
当 i0 jij时 (iji0 j)dijp 0
与塑性应变向量之间所成的夹角不应 该大于90°
稳定材料的屈服面必须是凸的.
(a)满足稳定材 料的屈服面
ij
0 ij
(b) 不满足稳定 材料的屈服面
/2
2 塑性应变增量向量与屈服面法向平行
d 必p 与加载面的外法线
重合,否则总可以找到A0 使A0A·dεp≥0不成立(如右 图)。
的真实功与ij0起点无关;
Ñ d ipj ij ij 0
(2)附加应力功不符合功的 定义,并非真实功
i0j ij i0jdij0
-
应力循环中外载所作真实功 与附加应力功
(3)非真实物理功不能引用热力学定律;
(4)德鲁克公设的适用条件:
①ij0在塑性势面与屈服面
之内时,德鲁克公设成立;
d
p ij
d
ij
由应力空间中的屈服与应变空间中屈服面的转换关系,可得:
结合
-
D
ij
ij
dipj Ddipj
d
p ij
d
ij
可得:
d d
3.1.4 塑性位势理论与流动法则
与弹性位势理论相类似,Mises于1928年提出塑性
位势理论。他假设经过应力空间的任何一点M,必有
一塑性位势等势面存在,其数学表达式称为塑性位势
残余应力增量与塑性 应变增量存在关系:
dipj Ddipj
式中,D为弹性矩阵。 根据依留申公设,在 完成上述应变循环中, 外部功不为负,即
Ñ WI ijdij 0 i0j
只有在弹性应变时,上述WI=0。
根据Druker塑性公设
当 i0 jij时 (iji0 j)dijp 0
弹塑性力学塑性本构关系

0
14
1.理想塑性材料的增量本构关系 2.硬化材料的增量塑性本构关系 3.全量塑性本构关系
15
2. 硬化材料的增量塑性本构关系
d
p ij
d
f
ij
f g 相关联流动
塑性应变大小 塑性应变方向
对于强化材料
f
ij
d ij
0
d ij 在
f
ij
方向上的投影,反映了塑性应变增量的大小。
可假设:
d
1 h
H121
Cp ijkl
1
9K 2
G
H11H 22
H
2 22
对称
H11H 33
H 22H33
H
2 33
H11H12 H 22H12 H 33 H12
H122
H11H 23
H 22H 23
H 33 H12
H12H 23
H
2 23
H11H 31 H 22H31
H
33
H
31
H12H31
H12
H
0
如果hd以 d累积pf塑2ij d性d32应ijd变ijpdkfddijpkdp作32p0为d内2变hd量f ij
f
fij ij
ij
p ij
d
k k p k d2 p f f
p ij
d
d
p ij
d
f k
k
p
d
d p
f
p
ij
0
3 ij ij
2 f f
3 ij ij
h f
Cijkl
1 H
H
ij
H
kl
H
非线性有限元9弹塑性本构关系ppt课件
单轴试验下材料的弹塑性性态 (1/3)
对塑性变形基本规律的认识来自于实验: • 从实验中找出在应力超出弹性极限后材料的特性; • 将这些特性进行归纳并提出合理的假设和简化模型,
确定应力超过弹性极限后材料的本构关系; • 建立塑性力学的基本方程; 1) 求解这些方程,得到不同塑性状态下物体内的应力和
应变。
• 塑性阶段:继续加载,材料可承受 更大应力,称为材料强化,并伴随 出现塑性应变。至A点以前卸载, 路径接近直线,即处于弹性卸载状 态,其斜率等于加载斜率E。
1) 破坏点:继续加载至可承受的最大 极限应力,试件出现颈缩而破坏,
称为强度极限。
在日常生活中,随处都可以看到浪费 粮食的 现象。 也许你 并未意 识到自 己在浪 费,也 许你认 为浪费 这一点 点算不 了什么
1913年:泰勒(Taylor)的实验证明,LevyMises本构关系是真实情况的一阶近似。
1924年:提出塑性全量理论,伊柳辛(Ilyushin) 等苏联学者用来解决大量实际问题。
1930年:罗伊斯(Reuss)在普朗特(Prandtle) 的启示下,提出包括弹性应变部分的三维塑性应力 -应变关系。至此,塑性增量理论初步建立。
(屈服点),描写多维问题的屈服条件就需要应力或应变空间的一个临界曲面,该
曲面称为屈服面。
考虑到塑性变形与静
水压力无关的特点
f1,2,3C
FJ2,J3C
至今已出现许多屈服理论。俞茂宏教授在这方面做出了重要贡献。 屈服函数:
是描写屈服条件的函数。不同屈服条件,其屈服函数不尽相同。
在日常生活中,随处都可以看到浪费 粮食的 现象。 也许你 并未意 识到自 己在浪 费,也 许你认 为浪费 这一点 点算不 了什么
基本实验有两个: • 简单拉伸实验:实验表明,塑性力学研究的应力与应变
对塑性变形基本规律的认识来自于实验: • 从实验中找出在应力超出弹性极限后材料的特性; • 将这些特性进行归纳并提出合理的假设和简化模型,
确定应力超过弹性极限后材料的本构关系; • 建立塑性力学的基本方程; 1) 求解这些方程,得到不同塑性状态下物体内的应力和
应变。
• 塑性阶段:继续加载,材料可承受 更大应力,称为材料强化,并伴随 出现塑性应变。至A点以前卸载, 路径接近直线,即处于弹性卸载状 态,其斜率等于加载斜率E。
1) 破坏点:继续加载至可承受的最大 极限应力,试件出现颈缩而破坏,
称为强度极限。
在日常生活中,随处都可以看到浪费 粮食的 现象。 也许你 并未意 识到自 己在浪 费,也 许你认 为浪费 这一点 点算不 了什么
1913年:泰勒(Taylor)的实验证明,LevyMises本构关系是真实情况的一阶近似。
1924年:提出塑性全量理论,伊柳辛(Ilyushin) 等苏联学者用来解决大量实际问题。
1930年:罗伊斯(Reuss)在普朗特(Prandtle) 的启示下,提出包括弹性应变部分的三维塑性应力 -应变关系。至此,塑性增量理论初步建立。
(屈服点),描写多维问题的屈服条件就需要应力或应变空间的一个临界曲面,该
曲面称为屈服面。
考虑到塑性变形与静
水压力无关的特点
f1,2,3C
FJ2,J3C
至今已出现许多屈服理论。俞茂宏教授在这方面做出了重要贡献。 屈服函数:
是描写屈服条件的函数。不同屈服条件,其屈服函数不尽相同。
在日常生活中,随处都可以看到浪费 粮食的 现象。 也许你 并未意 识到自 己在浪 费,也 许你认 为浪费 这一点 点算不 了什么
基本实验有两个: • 简单拉伸实验:实验表明,塑性力学研究的应力与应变
弹塑性力学讲义本构关系
当材料处于σ3=0,σ1=σ2=σs的平面应力状态时,
2 1 s3= σs ,s1=s2= σs,s别为
1 1 J2 = [(s1)2+(s3)2+(s3)2] = (σs)2 3 3 1 1 τmax= (σ1σ2)= σs 2 2
(2) 加,卸载或中性变载取决(f/σij)dσij的符号.
e p dε ij = dε ij + dε ij
在应力循环中,附加应力在弹性应变上所做功为零
∫σ ∫σ
ij
0 e (σij σij )dε ij = 0
ij
0 p (σij σij )dεij ≥ 0
1 0 p (σij + dσ ij σ ij ) dε ij ≥ 0 2
Drucker公设的两个推论
(2)不稳定材料:应变增加,应力减少,称之为应变软化,σε<0,
(3)随应力增加,应变减少,这种情况和能量守恒原理矛盾
应力循环
0 从1点的应力状态 σ ij σ ij 是静力可能的应力)开始, ( 0
施加某种外力使其达到2点(其应力为σij)并进入屈服, 再施加应力增量dσij使其加载到达3点(其应力为σij +dσij ),
p dε ij = dλ
f = dλsij σ ij
= 0 dλ = ≥ 0
J 2 < σ2 / 3 s
或 J 2 = σ 2 / 3, dJ 2 < 0 s
J 2 = σ 2 / 3, dJ 2 = 0 s
p dεij = deijp 塑性应变增量是一个偏量
deij =
1 dsij + dλsij 2G
dε ip = dλ1 f1 f + dλ 2 2 σi σi
2 1 s3= σs ,s1=s2= σs,s别为
1 1 J2 = [(s1)2+(s3)2+(s3)2] = (σs)2 3 3 1 1 τmax= (σ1σ2)= σs 2 2
(2) 加,卸载或中性变载取决(f/σij)dσij的符号.
e p dε ij = dε ij + dε ij
在应力循环中,附加应力在弹性应变上所做功为零
∫σ ∫σ
ij
0 e (σij σij )dε ij = 0
ij
0 p (σij σij )dεij ≥ 0
1 0 p (σij + dσ ij σ ij ) dε ij ≥ 0 2
Drucker公设的两个推论
(2)不稳定材料:应变增加,应力减少,称之为应变软化,σε<0,
(3)随应力增加,应变减少,这种情况和能量守恒原理矛盾
应力循环
0 从1点的应力状态 σ ij σ ij 是静力可能的应力)开始, ( 0
施加某种外力使其达到2点(其应力为σij)并进入屈服, 再施加应力增量dσij使其加载到达3点(其应力为σij +dσij ),
p dε ij = dλ
f = dλsij σ ij
= 0 dλ = ≥ 0
J 2 < σ2 / 3 s
或 J 2 = σ 2 / 3, dJ 2 < 0 s
J 2 = σ 2 / 3, dJ 2 = 0 s
p dεij = deijp 塑性应变增量是一个偏量
deij =
1 dsij + dλsij 2G
dε ip = dλ1 f1 f + dλ 2 2 σi σi
弹塑性力学本构关系
U 0 ij ij
—— Green公式
U 0 U 0 U 0 U 0 U 0 U 0 x , y , z , xy , yz , zx x y z xy yz zx
由
同理
x U 0 c12 y x c31 c14 c41
横观各向异性材料,其独立的弹性常数为13个;正应变会 产生切应力,切应变也会产生正应力 工程上,单斜晶体(如正长石)可简化为横观各向异性弹 性体。
二. 正交各向异性材料
z
具有三个相互垂直弹性对 称面的材料称为正交各向异性 材料。 设三个弹性对称面分别为 Oxy、Oyz和Ozx平面,材料沿 x、 y、 z 三方向弹性性质各异。
对 称
1 c22 c33 , c44 c66 , c55 c22 c23 2
0 0 0 0 1 c11 c12 2
x y z 0 xy yz 0 zx 1 c11 c12 2 0 0 0
c12 c21 c15 c51
c56 c65
即
cmn cnm
x c11 c12 c22 y z xy 对 yz zx
c13 c23 c33
称
m、n ij、kl 1 11 2 22 3 33 4 12 5 23 6 31
如,c22 c2222 , c56 c2331 广义胡克定律的一般形式最广泛地描述了材料的线弹性性 质,但未能描述物体外部环境条件和内部物理特征。
§4-2 线弹性体的本构关系
如果材料在变形过程中处于等温绝热过程。 根据热力学第一定律和相应数学推导, ij f ij 有势, 其势函数U0(ij) 为物体单位体积的变形能(应变能)。
—— Green公式
U 0 U 0 U 0 U 0 U 0 U 0 x , y , z , xy , yz , zx x y z xy yz zx
由
同理
x U 0 c12 y x c31 c14 c41
横观各向异性材料,其独立的弹性常数为13个;正应变会 产生切应力,切应变也会产生正应力 工程上,单斜晶体(如正长石)可简化为横观各向异性弹 性体。
二. 正交各向异性材料
z
具有三个相互垂直弹性对 称面的材料称为正交各向异性 材料。 设三个弹性对称面分别为 Oxy、Oyz和Ozx平面,材料沿 x、 y、 z 三方向弹性性质各异。
对 称
1 c22 c33 , c44 c66 , c55 c22 c23 2
0 0 0 0 1 c11 c12 2
x y z 0 xy yz 0 zx 1 c11 c12 2 0 0 0
c12 c21 c15 c51
c56 c65
即
cmn cnm
x c11 c12 c22 y z xy 对 yz zx
c13 c23 c33
称
m、n ij、kl 1 11 2 22 3 33 4 12 5 23 6 31
如,c22 c2222 , c56 c2331 广义胡克定律的一般形式最广泛地描述了材料的线弹性性 质,但未能描述物体外部环境条件和内部物理特征。
§4-2 线弹性体的本构关系
如果材料在变形过程中处于等温绝热过程。 根据热力学第一定律和相应数学推导, ij f ij 有势, 其势函数U0(ij) 为物体单位体积的变形能(应变能)。
弹塑性力学-弹塑性本构关系
0 0 p
W D ( ij ij ) d ij 0
0 p
由图(a)可知,对于弹性性质不随加载面改变的非耦合情况,外 部作用在应变循环内做功WI和应力循环所作的外部功之间仅差 一个正的附加项: 1
d
p
d
p
2
因此可将应变循环所作的外部功,写成
WI WD 1 2 d ij d
d
p
2 3
d e ij d e ij
p
p
m ises : q s H ( d W
p
)[ 或 H ( d
p
p
)] 0
p
tresca : m ax s H ( d W
)[ 或 H ( d
)] 0
在应力空间中,这种后 继屈服面的大小 只与最大 的应力状态有关,而与中 间的加载路径无关。在右 图中,路径1与路径2的最 终应力 状态都刚好对应于 加载过程中最大应力状态, 因此两者的最终后继屈服 是一样的;而路径3的最 终后继屈服面由加载路径 中最大应力状态来定。
0
p
ij
0
ij
0
W D ( ij a d ij ij ) d
0
p
ij
0
1 a
1 2
当 ij ij时 , 略 去 无 穷 小 量
0
( ij ij ) d ij 0
0 p
屈服面的外凸性 塑性应变增量方向 与加载曲面正交
当
0 ij
( ij , H ) F ( I 1 , J 2 , J 3 ) K 0 初始屈服面 硬化系数
p p
t r e s c a 、 vo n m ises 、 M - C K H ( d W ) 或 H ( d
W D ( ij ij ) d ij 0
0 p
由图(a)可知,对于弹性性质不随加载面改变的非耦合情况,外 部作用在应变循环内做功WI和应力循环所作的外部功之间仅差 一个正的附加项: 1
d
p
d
p
2
因此可将应变循环所作的外部功,写成
WI WD 1 2 d ij d
d
p
2 3
d e ij d e ij
p
p
m ises : q s H ( d W
p
)[ 或 H ( d
p
p
)] 0
p
tresca : m ax s H ( d W
)[ 或 H ( d
)] 0
在应力空间中,这种后 继屈服面的大小 只与最大 的应力状态有关,而与中 间的加载路径无关。在右 图中,路径1与路径2的最 终应力 状态都刚好对应于 加载过程中最大应力状态, 因此两者的最终后继屈服 是一样的;而路径3的最 终后继屈服面由加载路径 中最大应力状态来定。
0
p
ij
0
ij
0
W D ( ij a d ij ij ) d
0
p
ij
0
1 a
1 2
当 ij ij时 , 略 去 无 穷 小 量
0
( ij ij ) d ij 0
0 p
屈服面的外凸性 塑性应变增量方向 与加载曲面正交
当
0 ij
( ij , H ) F ( I 1 , J 2 , J 3 ) K 0 初始屈服面 硬化系数
p p
t r e s c a 、 vo n m ises 、 M - C K H ( d W ) 或 H ( d
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
p z
s s /
2
1 h
3 22s
(
2 3
z
dz
)z
s 1 h
1 2
= ,
p z
s s /
2
1 h
3 22s
(2 z d z
)
z 3
3 h
s
1
1 2
塑性变形与加载路径有关
三种应力路径下的弹性应变都是
e z
z E
e z
z G
s 3G
全量理论
•增量理论: 一般来说,增量应力—应变关系(本构关系)是不可积的, 在某些加载情况下,增量理论可积分得到应力与应变之间的全量关系,
sz=
2 z,sx= sy = 3
1 3
z,sz=
sz=z,
J2
1 3
2z
2z
2s 3
f ij
dij
2
3 J2
(
2 3
z
d
z
2zdz )
由于z、dz同号,、dz同号,因此,
f ij
dij
0
(3)使用流动法则求塑性变形
d
p z
1 h
f ij
dij
f
z
1 h
2
3 J2
(2 3
z d z
2z dz
z
M
T
z
s/3
(2) (3)
(1)
s
解:(1)求塑性模量: 在单轴应力状态下,弹性应变是 e 。而塑性应变是
E p e s
E
塑性模量应是 (2)加载判别:
h
d d p
E
当应力状态达到初始屈服后,下一步应力增量是否产生塑性变形,取决
于 (f/ij) dij是否大于零。 该题各路径下的应力状态偏量均可表示为:
s
J2
1 3
2s
2z
pz
s 0
3
1 h
2s
3 32z
(z dzBiblioteka )s s 2hln
x2
2 s
3
s 0
/
3
s ln 2 2h
p z
s 0
3
1 h
2s
3 32z
(3z dz
)z
9 h
z 3
s 33
arctan
3z s
s 0
/
3
3 h
1
4
s
路径(2):当剪应力z=s/3,材料屈服,增加应力z,即dz 0,dz=0,
(nn
2
C
2
2
(nn
2
2
C
2
1
1
n= 2 (1 +3)+ 2(1 3)sin
n=
1 2
(1
3)cos
屈服条件用主应力表示
1 2
(1
3)
+1 2
(1 +
3)sin
Ccos
=
0
2 2
x
sin 6
y
C
cos
0
sin
Cctan
当123时,Mohr-Coulomb屈服条件可写成
1 3 1 ft fC
dsij+dsij
dkk=
(1
2v E
)dkk
t
0
eij dt
1 2G
t
0
sij dt
si0j
t
0
td
1 t
t
0
td
eij=
( 1 ) 2G
sij
kk=
(1
2v E
)
kk
令 H=1/2G + 得:
eijeij=H2sijsij 得:
eij=Hsij。 H eijeij 3
sij sij 2
• 拉伸和压缩的力学性能差别很大
2
f't
f'c
1
f't
fc'
• 产生应变软化现象
应变软化段
• 产生塑性体积膨胀变形
0
v
• 与静水压力有关
3
3
1
2
围 压 增 加
3
• 具有弹塑性耦合 弹性模量降低
岩土材料塑性变形的特性与金属材料不同 • Tresca和Mises屈服条件及其相关联的流动法则不再适当; • 屈服面和流动法则等概念可以借用,需进行适当的修正
Mohr-Coulomb屈服条件
考察一任意剪切面,该面上的剪应力为n,正应力为n,
• 推动剪切滑移的有效剪切力是n • 阻止剪切滑动力:内摩擦力(n) tan,粘结力C
Mohr条件:
n = (n) tan +C
随静水压力增长,减小,在 应力平面上不是直线,而是曲线,
Coulumb条件: 对于土和受静水压力不太大的岩石,可假定角为常数,为直线
eij
3 2
sij
单一曲线假定 当材料几乎为不可压缩时,按照不同应力组合所得出的 ~ 曲线与
单轴拉伸时的 ~ 曲线十分相近。
简单加载定理
如何保证物体的每一个微小单元都处在简单(比例)加载情况,Ilusion给 出了一组充分条件。 • 小变形; • 材料不可压缩; • 外荷载按比例单调增长,如有位移边界条件,只能是零位移边界条件; • 材料 ~ 的曲线具有幂指数硬化形式 An
)
2
3 J2
2 3
z
1 h
1 J2
(1 3
z d z
z dz
)z
1 2
d
p z
1 h
f ij
dij
f z
1 h
2
3 J2
(
2 3
z
d
z
2zdz ) 2
3 J2
z
1 h
1 2J2
( z d z
3z dz
)z
(4)按上述路径进行积分,塑性变形
=
路= 径(1):z=s,材料屈服,再增加剪应力dz0,dz=0,
z=s/3
J2
1 3
2 z
2s
p z
s 0
31 h
2z
3 2s
(1 3
z
d
z
)
z
1 h
z
s
arctan z s
s 0
s h
1
4
p z
s 0
3
1 h
2s
3
2s
( z d z
)
s 3
s ln 2 3h
x2
2s
s
0
3s ln 2 2h
路径(3):在加载中z = 3z,z=s/2材料屈服,且dz = 3dz,
•全量理论: 应力应变一一对应的确定关系,相当于非线性弹性(不考虑卸载) 求解简单
简单加载(比例加载)
•是指应力各分量之间成比例且单调增长,即
ij ti0j
sij tsi0j
(t>0,dt>0)
•在平面上,该加载路径是一条=const的射线,
e' 2
y
dipj
o
x
e13'
e' 1
deij=
1 2G
金属塑性(位错滑移) • 屈服只取决于偏应力,而与静水压力无关。 • 不存在塑性体积变形, • 拉伸和压缩的塑性特性几乎一致
岩土材料(岩土材料内部包含大量的微裂纹)
• 在受拉状态下一般表现为脆性而几乎不产生塑性变形。 • 只有在受压状态,由于微裂纹的扩展或闭合裂纹表面的相对滑动,
才可能产生类似于金属的塑性变形
ft
2c cos 1 sin
单轴拉伸屈服应力
fc
2c cos 1 sin
单轴压缩屈服应力
m fc 1 sin ft 1 sin
m1 3 fc