nrf24l01发送接收一体程序(以调通-解决了接收端只能接收一次的问题)
NRF24L01无线模块收发程序(实测成功 多图)
NRF24L01无线模块收发程序(实测成功多图)本模块是NRF24L01无线传输模块,用于无线传输数据,距离不远,一般只是能够满足小距离的传输,目测是4-5m,价格一般是4元左右,可以方便的买到。
51最小系统学习板就可以,当时是用了两块学习板,一块用于发送,一块用于接收。
小车也是比较容易购到的,四个端口控制两个电机,两个控制一个电机,当两个端口高低电平不同时电机就会转动,即为赋值1和0是电机转动,赋值可以用单片机作用,当然这是小车启动部分,前进后退左转右转就是你赋值0和1的顺序问题了。
整体思路是用发射端的按键控制小车,即为按键按下就前进,再按其他按键实现其他功能,本次程序是在用NRF24L01发射数据在接收端用1602显示的基础上改变。
下面是程序源码(有好几个文件,分别创建)////////////////////////////////////////////////////////////////////////////////////////////////////////////// ////////////////#include#include#include'1602.h'#include'delay.h'#include 'nrf24l01.h'#define uint unsigned int#define uchar unsigned charuint Weight_Shiwu=1234;unsigned char KeyScan(void);//键盘扫描// unsigned char KeyScan(void);//键盘扫描//#define KeyPort P0sbit KEY1 = P0^0;sbit KEY2 = P0^1;sbit KEY3 = P0^2;sbit KEY4 = P0^3;sbit KEY5 = P0^4;void main(){// char TxDate[4];// LCD_Init(); //初始化液晶屏// LCD_Clear(); //清屏// NRF24L01Int(); //初始化LCD1602// LCD_Write_String(4,0,'welcome');while(1){KeyScan();}}unsigned char KeyScan(void){/********************************************************/ char TxDate[4];{if(!KEY1) //如果检测到低电平,说明按键按下{DelayMs(10); //延时去抖,一般10-20msif(!KEY1) //再次确认按键是否按下,没有按下则退出{while(!KEY1);//如果确认按下按键等待按键释放,没有则退出{TxDate[0] = 1;//向左转TxDate[1] = 0;TxDate[2] = 1;TxDate[3] = 1;NRFSetTxMode(TxDate);//发送数据·while(CheckACK()); //检测是否发送完毕}}}/********************************************************/ else if(!KEY2) //如果检测到低电平,说明按键按下{DelayMs(10); //延时去抖,一般10-20msif(!KEY2) //再次确认按键是否按下,没有按下则退出{while(!KEY2);//如果确认按下按键等待按键释放,没有则退出{TxDate[0] = 1;//向右转TxDate[1] = 1;TxDate[2] = 1;TxDate[3] = 0;NRFSetTxMode(TxDate);//发送数据while(CheckACK()); //检测是否发送完毕}}}/********************************************************/ else if(!KEY3) //如果检测到低电平,说明按键按下{DelayMs(10); //延时去抖,一般10-20msif(!KEY3) //再次确认按键是否按下,没有按下则退出{while(!KEY3);//如果确认按下按键等待按键释放,没有则退出{TxDate[0] = 1;//前进TxDate[1] = 0;TxDate[2] = 1;TxDate[3] = 0;NRFSetTxMode(TxDate);//发送数据while(CheckACK()); //检测是否发送完毕}}}/********************************************************/ else if(!KEY4) //如果检测到低电平,说明按键按下{DelayMs(10); //延时去抖,一般10-20msif(!KEY4) //再次确认按键是否按下,没有按下则退出{while(!KEY4);//如果确认按下按键等待按键释放,没有则退出{TxDate[0] = 0;//后退TxDate[1] = 1;TxDate[2] = 0;TxDate[3] = 1;NRFSetTxMode(TxDate);//发送数据while(CheckACK()); //检测是否发送完毕}}}else if(!KEY5){DelayMs(10);if(!KEY5){while(!KEY5){TxDate[0] = 1;TxDate[1] = 1;TxDate[2] = 1;TxDate[3] = 1;NRFSetTxMode(TxDate);while(CheckACK());}}}}}////////////////////////////////////////////////////////////////////////////////////////////////////////////// /////////#include#include#include'1602.h'#include'delay.h'#include 'nrf24l01.h'#define uint unsigned int#define uchar unsigned charuint Weight;sbit a = P2^0;sbit b = P2^1;sbit c = P2^2;sbit d = P2^3;void main(){LCD_Init(); //初始化液晶屏LCD_Clear(); //清屏*(RevTempDate+4)=*\0*;NRF24L01Int();while(1){NRFSetRXMode();//设置为接收模式GetDate();//开始接受数;//Weight=RevTempDate[0]*1000+RevTempDate[1]*100+RevTempDate[2]* 10+RevTempDate[3];LCD_Write_Char(7,0,RevTempDate[0]+0x30);LCD_Write_Char(8,0,RevTempDate[1]+0x30);LCD_Write_Char(9,0,RevTempDate[2]+0x30);LCD_Write_Char(10,0,RevTempDate[3]+0x30);a = RevTempDate[0];//根据接受数据来设置高低电平(目测仅限传输1.0两种数值)b = RevTempDate[1];c = RevTempDate[2];d = RevTempDate[3];}}////////////////////////////////////////////////////////////////////////////////////////////////////////////// /////////////////////////////////////#include#include 'nrf24l01.h'#define uchar unsigned char#define uint unsigned intsbit IRQ =P1^2;//输入sbit MISO =P1^3; //输入sbit MOSI =P1^1;//输出sbit SCLK =P1^4;//输出sbit CE =P1^5;//输出sbit CSN =P1^0;//输出uchar code TxAddr[]={0x34,0x43,0x10,0x10,0x01};//发送地址/*****************状态标志*****************************************/uchar bdata sta; //状态标志sbit RX_DR=sta^6;sbit TX_DS=sta^5;sbit MAX_RT=sta^4;/*****************SPI时序函数******************************************/uchar NRFSPI(uchar date){uchar i;for(i=0;i{if(date&0x80)MOSI=1;elseMOSI=0; // byte最高位输出到MOSIdateSCLK=1;if(MISO) // 拉高SCK,nRF24L01从MOSI读入1位数据,同时从MISO 输出1位数据date|=0x01; // 读MISO到byte最低位SCLK=0; // SCK置低}return(date); // 返回读出的一字节}/**********************NRF24L01初始化函数*******************************/void NRF24L01Int(){DDelay(2);//让系统什么都不干CE=0; //待机模式1CSN=1;SCLK=0;IRQ=1;}/*****************SPI读寄存器一字节函数*********************************/uchar NRFReadReg(uchar RegAddr){uchar BackDate;CSN=0;//启动时序NRFSPI(RegAddr);//写寄存器地址BackDate=NRFSPI(0x00);//写入读寄存器指令CSN=1;return(BackDate); //返回状态}/*****************SPI写寄存器一字节函数*********************************/uchar NRFWriteReg(uchar RegAddr,uchar date){uchar BackDate;CSN=0;//启动时序BackDate=NRFSPI(RegAddr);//写入地址NRFSPI(date);//写入值return(BackDate);}/*****************SPI读取RXFIFO寄存器的值********************************/uchar NRFReadRxDate(uchar RegAddr,uchar *RxDate,uchar DateLen) { //寄存器地址//读取数据存放变量//读取数据长度//用于接收uchar BackDate,i;CSN=0;//启动时序BackDate=NRFSPI(RegAddr);//写入要读取的寄存器地址for(i=0;i{RxDate[i]=NRFSPI(0);}CSN=1;return(BackDate);}/*****************SPI写入TXFIFO寄存器的值**********************************/uchar NRFWriteTxDate(uchar RegAddr,uchar *TxDate,uchar DateLen) { //寄存器地址//写入数据存放变量//读取数据长度//用于发送uchar BackDate,i;CSN=0;BackDate=NRFSPI(RegAddr);//写入要写入寄存器的地址for(i=0;i{NRFSPI(*TxDate++);}CSN=1;return(BackDate);}/*****************NRF设置为发送模式并发送数据******************************/void NRFSetTxMode(uchar *TxDate){//发送模式NRFWriteTxDate(W_REGISTER+TX_ADDR,TxAddr,TX_ADDR_WITD H);//写寄存器指令+接收地址使能指令+接收地址+地址宽度NRFWriteTxDate(W_REGISTER+RX_ADDR_P0,TxAddr,TX_ADDR_WI TDH);//为了应答接收设备,接收通道0地址和发送地址相同NRFWriteTxDate(W_TX_PAYLOAD,TxDate,TX_DATA_WITDH);//写入数据/******下面有关寄存器配置**************/NRFWriteReg(W_REGISTER+EN_AA,0x01); // 使能接收通道0自动应答NRFWriteReg(W_REGISTER+EN_RXADDR,0x01); // 使能接收通道0 NRFWriteReg(W_REGISTER+SETUP_RETR,0x0a); // 自动重发延时等待250us+86us,自动重发10次NRFWriteReg(W_REGISTER+RF_CH,0x40); // 选择射频通道0x40 NRFWriteReg(W_REGISTER+RF_SETUP,0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益NRFWriteReg(W_REGISTER+CONFIG,0x0e); // CRC使能,16位CRC 校验,上电CE=1;DDelay(5);//保持10us秒以上}/*****************NRF设置为接收模式并接收数据******************************///主要接收模式void NRFSetRXMode(){CE=0;NRFWriteTxDate(W_REGISTER+RX_ADDR_P0,TxAddr,TX_ADDR_WI TDH); // 接收设备接收通道0使用和发送设备相同的发送地址NRFWriteReg(W_REGISTER+EN_AA,0x01); // 使能接收通道0自动应答NRFWriteReg(W_REGISTER+EN_RXADDR,0x01); // 使能接收通道0 NRFWriteReg(W_REGISTER+RF_CH,0x40); // 选择射频通道0x40 NRFWriteReg(W_REGISTER+RX_PW_P0,TX_DATA_WITDH); // 接收通道0选择和发送通道相同有效数据宽度NRFWriteReg(W_REGISTER+RF_SETUP,0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益*/NRFWriteReg(W_REGISTER+CONFIG,0x0f); // CRC使能,16位CRC 校验,上电,接收模式CE = 1;DDelay(5);//保持10us秒以上}/****************************检测应答信号******************************/uchar CheckACK(){ //用于发射sta=NRFReadReg(R_REGISTER+STATUS); // 返回状态寄存器if(TX_DS||MAX_RT) //发送完毕中断{NRFWriteReg(W_REGISTER+STATUS,0xff); // 清除TX_DS或MAX_RT中断标志CSN=0;NRFSPI(FLUSH_TX);//用于清空FIFO !!关键!!不然会出现意想不到的后果!!!大家记住!!CSN=1;return(0);}elsereturn(1);}/******************判断是否接收收到数据,接到就从RX取出*********************///用于接收模式uchar NRFRevDate(uchar *RevDate){uchar RevFlags=0;sta=NRFReadReg(R_REGISTER+STATUS);//发送数据后读取状态寄存器if(RX_DR) // 判断是否接收到数据{CE=0; //SPI使能NRFReadRxDate(R_RX_PAYLOAD,RevDate,RX_DATA_WITDH);// 从RXFIFO读取数据RevFlags=1; //读取数据完成标志}NRFWriteReg(W_REGISTER+STATUS,0xff); //接收到数据后RX_DR,TX_DS,MAX_PT都置高为1,通过写1来清楚中断标return(RevFlags);}void DDelay(uint t){uint x,y;for(x=t;x>0;x--)for(y=110;y>0;y--);}//////////////////////////////////////////////////////////////////////////////////////////////////////// #include 'delay.h'/*------------------------------------------------uS延时函数,含有输入参数unsigned char t,无返回值unsigned char 是定义无符号字符变量,其值的范围是0~255 这里使用晶振12M,精确延时请使用汇编,大致延时长度如下T=tx2+5 uS------------------------------------------------*/void DelayUs2x(unsigned char t){while(--t);}/*------------------------------------------------mS延时函数,含有输入参数unsigned char t,无返回值unsigned char 是定义无符号字符变量,其值的范围是0~255 这里使用晶振12M,精确延时请使用汇编------------------------------------------------*/void DelayMs(unsigned char t){while(t--){//大致延时1mSDelayUs2x(245);DelayUs2x(245);}}///////////////////////////////////////////////////////////////////////////////////////////下面是接收的NRF24L01的程序。
NRF24L01的发送与接收程序

N R F24L01的发送与接收程序-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN#include <>#include <>typedef unsigned char uchar;typedef unsigned char uint;SCK = 1;uchar |= MISO; then set SCK low again}return(uchar); .SPI_RW(reg);reg_val = SPI_RW(0); then read registervalueCSN = 1; and write value to it..CSN = 1;SCK = 1;uchar |= MISO; then set SCK low again}return(uchar); .SPI_RW(reg);reg_val = SPI_RW(0); then read registervalueCSN = 1; and write value to it..CSN = 1; // CSN high againreturn(status); // return nRF24L01 status uchar}/*********************//*函数:uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars)/*功能: 用于读数据,reg:为寄存器地址,pBuf:为待读出数据地址,uchars:读出数据的个数/*********************/uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars){uint status,uchar_ctr;CSN = 0; // Set CSN low, init SPI tranactionstatus = SPI_RW(reg); // Select register to write to and read status ucharfor(uchar_ctr=0;uchar_ctr<uchars;uchar_ctr++)pBuf[uchar_ctr] = SPI_RW(0); //CSN = 1;return(status); // return nRF24L01 status uchar}/**************************/*函数:uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars)/*功能: 用于写数据:为寄存器地址,pBuf:为待写入数据地址,uchars:写入数据的个数/**************************/uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars){uint status,uchar_ctr;CSN = 0; //SPI使能status = SPI_RW(reg);for(uchar_ctr=0; uchar_ctr<uchars; uchar_ctr++) //SPI_RW(*pBuf++);CSN = 1; //关闭SPIreturn(status); //}/********************//*函数:void SetRX_Mode(void)/*功能:数据接收配置/**********************/void SetRX_Mode(void){CE=0;SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // IRQ收发完成中断响应,16位CRC,主接收CE = 1;inerDelay_us(130); //延时不能太短}/**********************//*函数:unsigned char nRF24L01_RxPacket(unsigned char* rx_buf)/*功能:数据读取后放如rx_buf接收缓冲区中/***********************/unsigned char nRF24L01_RxPacket(unsigned char* rx_buf){unsigned char revale=0;sta=SPI_Read(STATUS); // 读取状态寄存其来判断数据接收状况if(RX_DR) // 判断是否接收到数据{CE = 0; //SPI使能SPI_Read_Buf(RD_RX_PLOAD,rx_buf,TX_PLOAD_WIDTH);// read receive payload from RX_FIFO bufferrevale =1; //读取数据完成标志}SPI_RW_Reg(WRITE_REG+STATUS,sta); //接收到数据后RX_DR,TX_DS,MAX_PT都置高为1,通过写1来清楚中断标志return revale;}/****************************/*函数:void nRF24L01_TxPacket(unsigned char * tx_buf)/*功能:发送 tx_buf中数据/****************************/void nRF24L01_TxPacket(unsigned char * tx_buf){CE=0; //StandBy I模式SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 装载接收端地址SPI_Write_Buf(WR_TX_PLOAD, tx_buf, TX_PLOAD_WIDTH); // 装载数据// SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // IRQ收发完成中断响应,16位CRC,主发送CE=1; //置高CE,激发数据发送inerDelay_us(10);}//************************************主函数void main(void){uchar temp =0;init_NRF24L01() ;nRF24L01_TxPacket(TxBuf); // Transmit Tx buffer dataDelay(6000);P0=0xBF;while(1){nRF24L01_TxPacket(TxBuf); // Transmit Tx buffer dataLED=0;Delay(10000); //可变SPI_RW_Reg(WRITE_REG+STATUS,0XFF);LED=1;Delay(8000);}}。
NRF24L01--实用无线通信技术

NRF24L01是一款工作在2.4~2.5GHZ频段世界通用ISM频段(不受管制的频段)的单片无限收发器芯片,通信距离可达300米。
RF------------------------射频。
GFSK----------高斯频移键控。
一、模块介绍(1) 2.4Ghz 全球开放ISM 频段免许可证使用(2) 最高工作速率2Mbps ,高效GFSK 调制,抗干扰能力强,特别适合工业控制场合(3) 126 频道,满足多点通信和跳频通信需要(4) 内置硬件CRC 检错和点对多点通信地址控制(5) 低功耗1.9 - 3.6V 工作,待机模式下状态为22uA ;掉电模式下为900nA(6) 内置2.4Ghz 天线,体积小巧15 mm X 29 mm(7) 模块可软件设地址,只有收到本机地址时才会输出数据(提供中断指示) ,可直接接各种单片机使用,软件编程非常方便--------中断方式接收数据。
(8) 内置专门稳压电路,使用各种电源包括DC/DC 开关电源均有很好的通信效果(9) 2.54 MM 间距接口,DIP 封装(10) 工作于Enhanced ShockBurst 具有Automatic packet handling, Auto packet transaction handling, 具有可选的内置包应答机制,极大的降低丢包率。
二、注意事项(1) VCC 脚接电压范围为1.9V~3.6V 之间,不能在这个区间之外,超过3.6V 将会烧毁模块。
推荐电压3.3V 左右。
(2) 除电源VCC 和接地端,其余脚都可以直接和普通的5V 单片机IO直接相连,无需电平转换。
当然对3V 左右的单片机更加适用了。
三、NRF24L01模块蛇形部分应该为天线(无线通信);中间方形部分应该为NRF24L01芯片,上面跑道形状为晶振。
四、8个引脚GND,VCC(接3.3V)CE-----芯片使能CSN-----片选非SCK------SPI1 CLKMOSI,MISO------SPI数据线IRQ-------中断信号线VDD_PA 电源输出---------给RF的功率放大器提供的+1.8V电源ANT1------------------天线接口1ANT2------------------天线接口2五、工作模式---------软件编程部分。
2.4G双向收发模块NRF24L01
2.4G双向收发模块NRF24L01⼀、简介WLC-24L01基于Nordic Semiconductor的nRF24L01⽆线收发芯⽚,是⼀款体积⼩巧的、低功耗、远距离的⽆线收发模块。
nRF24L01是Nordic推出的ISM频段⽆线收发芯⽚之⼀,频率设定为2.4G频段,灵敏度最佳可达到-94dBm@250Kbps,最⾼传输速率达2Mbps,输出功率通过寄存器配置可达到+4dBm。
模块集成了所有射频相关功能和器件,⽤户只需要通过SPI接⼝进⾏简单的寄存器配置,即可以实现通信,缩短了⽤户⽆线产品开发的周期。
nRF24L01是⼀款新型单⽚射频收发器件:⼯作于2.4GHz~2.5GHz ISM频段。
内置频率合成器、功率放⼤器、晶体振荡器、调制器等功能模块,并融合了增强型ShockBurst技术,其中输出功率和通信频道可通过程序进⾏配置。
NRF24L01功耗低:在以-6dBm的功率发射时,⼯作电流也只有9mA;接收时,⼯作电流只有12.3mA,多种低功率⼯作模式(掉电模式和空闲模式)使节能设计更⽅便。
⼆、基本特性●SHUTDOWN模式下,低电流损耗●⽅便投⼊应⽤●⼯作温度范围:﹣40℃~+85℃●⼯作电压:1.8~3.6Volts●有效频率:2.400G~2.525G●通信速率250K~2Mbps,可编程配置●3通道独⽴的32字节RX FIFO与TX FIFO●最多⽀持125个信号通道,可实现跳频通信●数字RSSI●⾃动频率校正(AFC)三、模块尺⼨图正视图侧视图斜⾓⽴体图四、应⽤范围●极低功耗UHF⽆线接收器●家⽤⽆线设备控制●⼯业仪器仪表⽆线数据采集和控制●AMR(⽔、电、煤⽓)三表抄表●建筑物与住宅(智能家居)控制●电⼦消费类产品⽆线遥控●⽆线报警与安全系统●⽆线传感器⽹络中控系统五、技术参数测试条件:Ta=25°C,VCC=3.3V技术指标参数备注⼯作电压直流 1.8~3.6V⼀般应⽤于3.0V或3.3V供电系统中中⼼频率2400MHz可配置寄存器到2400~2483MHz内频率误差±5KHz调制⽅式GFSK/2-FSK/MSK可通过配置寄存器实现不同的调制⽅式接收灵敏度-94dBm250kBaudRate发射电流<11.3mA@0dBm接收电流<13.5mA通过间歇式⼯作可实现200uA以内的平均⼯作电流休眠电流<1uA传输速率250K/1M/2M(bps)可通过配置寄存器实现不同的空中传输速率谐波功率<-35dBm最⼤0dBm输出时,⼆次谐波的功率通讯距离<50m ⽤WCL-nRF24L01作为发射器,GFSK调制⽅式,250kBaud 速率,0dBm发射天线阻抗50ohm⼯作温度-40~+85°C 存贮温度-55~+125°C外形尺⼨19mm×12mm×1.75mm引脚及详细尺⼨请以外形尺⼨图为准备注:1.模块的通信速率会影响通信距离,速率越⾼,通信距离越近,灵敏度越低。
NRF24L01t调试程序 含发送和接收 可直接用
//***SPI(nRF24L01) 寄存器地址**************************************************** #define CONFIG #define EN_AA 0x00 // 配置收发状态,CRC校验模式以及收发状态响应方式 0x01 // 自动应答功能设置
说实话,对于一个初次调试这个模块的同学,想要找一个直接可用的程序不好找,同时是找到的片 段程序很多又是木有注释的,我们(菜鸟)没有很好的理解芯片资料的能力,看着都是一头雾水。 在这儿,我贴出发送和接收两部分,希望可以让学习者轻松一点理解和掌握其操作流程。同时声明 一下,下面的程序不是我写的,但是99%的注释是我写的,对于掌握的人来说,不需要这样多的注 释,我是面对需要学习的人而写的。这样也算是我对电子技术给我的乐趣的回馈。在没有和程序作 所 帮助! 注释的位置需要调整一下哦 以下是发送端程序: #include <reg52.h> #include <intrins.h> #define MODE 0 //MODE=1时为发送代码 typedef unsigned char uchar; //************************************************IO 端口定义***************** sbit MISO = P2^3; sbit MOSI = P2^2; sbit SCK = P2^1; sbit CE = P2^5; sbit CSN = P2^0; sbit IRQ = P3^2; sbit led = P1^2; //***************************************************************************** uchar bdata sta; //状态标志 sbit RX_DR = sta^6; sbit TX_DS = sta^5; sbit MAX_RT = sta^4; MODE=0时为接收代码
nrf24l01使用与调试经验总结(包括一收多发)

nrf24l01使用与调试经验总结(包括一收多发--1主机最多6从机)----------------------------------------------------------------------------------------------------------------------------主要特性工作在2.4GHz ISM 频段调制方式:GFSK/FSK数据速率:2Mbps/1Mbps/250Kbps超低关断功耗:<0.7uA超低待机功耗:<15uA快速启动时间:<130uS内部集成高PSRR LDO宽电源电压范围:1.9-3.6V数字IO 电压: 3.3V/5V低成本晶振:16MHz±60ppm接收灵敏度:<-83dBm @2MHz最高发射功率:7dBm接收电流(2Mbps):<15mA发射电流(2Mbps):<12mA(0dBm)10MHz 四线SPI 模块内部集成智能ARQ 基带协议引擎收发数据硬件中断输出支持1bit RSSI 输出极少外围器件,降低系统应用成本QFN20 封装或COB 封装注意:C代表了命令,S表示寄存器值,D表示数据写数据:SPI写命令+寄存器地址----->SPI写入数据读数据:SPI写寄存器地址(可以使用读命令+寄存器地址)----->SPI读取数据不论是读取或者写入数据,甚至是读/写len长度的数据都要先写寄存器地址;总的来说时候就三个模式:1.待机模式(待机模式+掉电省电模式)2.发送模式3.接受模式具体各个模式介绍参考数据手册。
----------------------------------------------------------------------------------------------------------------nrf发送数据是以包来发送。
NRF24L01详细教程
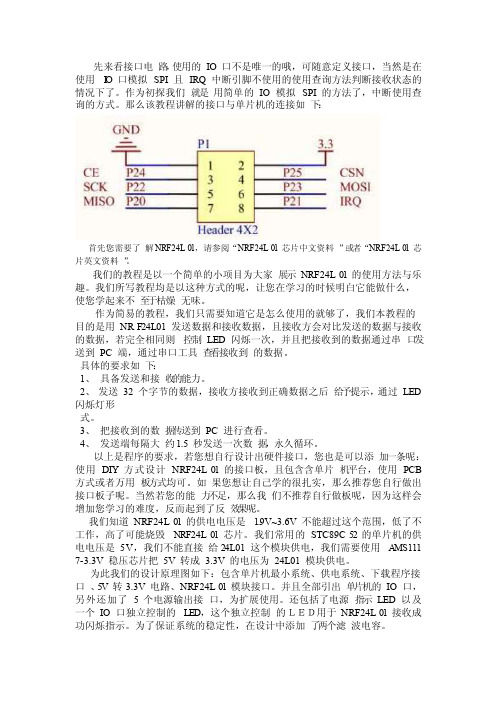
先来看接口电路,使用的IO 口不是唯一的哦,可随意定义接口,当然是在使用 I O 口模拟SPI 且IRQ 中断引脚不使用的使用查询方法判断接收状态的情况下了。
作为初探我们就是用简单的IO 模拟SPI 的方法了,中断使用查询的方式。
那么该教程讲解的接口与单片机的连接如下:首先您需要了解NRF24L01,请参阅“NRF24L01 芯片中文资料”或者“NRF24L01 芯片英文资料”。
我们的教程是以一个简单的小项目为大家展示NRF24L01 的使用方法与乐趣。
我们所写教程均是以这种方式的呢,让您在学习的时候明白它能做什么,使您学起来不至于枯燥无味。
作为简易的教程,我们只需要知道它是怎么使用的就够了,我们本教程的目的是用NRF24L01发送数据和接收数据,且接收方会对比发送的数据与接收的数据,若完全相同则控制LED 闪烁一次,并且把接收到的数据通过串口发送到PC 端,通过串口工具查看接收到的数据。
具体的要求如下:1、具备发送和接收的能力。
2、发送32 个字节的数据,接收方接收到正确数据之后给予提示,通过LED 闪烁灯形式。
3、把接收到的数据传送到PC 进行查看。
4、发送端每隔大约1.5 秒发送一次数据,永久循环。
以上是程序的要求,若您想自行设计出硬件接口,您也是可以添加一条呢:使用DIY 方式设计NRF24L01 的接口板,且包含含单片机平台,使用PCB 方式或者万用板方式均可。
如果您想让自己学的很扎实,那么推荐您自行做出接口板子呢。
当然若您的能力不足,那么我们不推荐自行做板呢,因为这样会增加您学习的难度,反而起到了反效果呢。
我们知道NRF24L01 的供电电压是 1.9V~3.6V 不能超过这个范围,低了不工作,高了可能烧毁 NRF24L01 芯片。
我们常用的STC89C52 的单片机的供电电压是5V,我们不能直接给24L01这个模块供电,我们需要使用 A MS1117-3.3V 稳压芯片把5V 转成3.3V 的电压为24L01 模块供电。
NRF24L01的发送与接收程序

#include <reg52.h>#include <intrins.h>typedef unsigned char uchar;typedef unsigned char uint;//****************************************NRF24L01端口定义sbit MISO =P1^5;sbit MOSI =P1^1;sbit SCK =P1^6;sbit CE =P1^7;sbit CSN =P1^2;sbit IRQ =P1^0;//************************************按键sbit KEY1=P3^4;//************************************蜂明器sbit LED=P3^5;//**************#define TX_ADR_WIDTH 5 // 5 uints TX address width#define RX_ADR_WIDTH 5 // 5 uints RX address width#define TX_PLOAD_WIDTH 32 // 20 uints TX payload#define RX_PLOAD_WIDTH 32 // 20 uints TX payloaduint const TX_ADDRESS[TX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x01}; //本地地址uint const RX_ADDRESS[RX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x01}; //接收地址//***************************************NRF24L01寄存器指令#define READ_REG 0x00 // 读寄存器指令#define WRITE_REG 0x20 // 写寄存器指令#define RD_RX_PLOAD 0x61 // 读取接收数据指令#define WR_TX_PLOAD 0xA0 // 写待发数据指令#define FLUSH_TX 0xE1 // 冲洗发送 FIFO指令#define FLUSH_RX 0xE2 // 冲洗接收 FIFO指令#define REUSE_TX_PL 0xE3 // 定义重复装载数据指令#define NOP 0xFF // 保留//*************************************SPI(nRF24L01)寄存器地址#define CONFIG 0x00 // 配置收发状态,CRC校验模式以及收发状态响应方式#define EN_AA 0x01 // 自动应答功能设置#define EN_RXADDR 0x02 // 可用信道设置#define SETUP_AW 0x03 // 收发地址宽度设置#define SETUP_RETR 0x04 // 自动重发功能设置#define RF_CH 0x05 // 工作频率设置#define RF_SETUP 0x06 // 发射速率、功耗功能设置#define STATUS 0x07 // 状态寄存器#define OBSERVE_TX 0x08 // 发送监测功能#define CD 0x09 // 地址检测#define RX_ADDR_P0 0x0A // 频道0接收数据地址#define RX_ADDR_P1 0x0B // 频道1接收数据地址#define RX_ADDR_P2 0x0C // 频道2接收数据地址#define RX_ADDR_P3 0x0D // 频道3接收数据地址#define RX_ADDR_P4 0x0E // 频道4接收数据地址#define RX_ADDR_P5 0x0F // 频道5接收数据地址#define TX_ADDR 0x10 // 发送地址寄存器#define RX_PW_P0 0x11 // 接收频道0接收数据长度#define RX_PW_P1 0x12 // 接收频道0接收数据长度#define RX_PW_P2 0x13 // 接收频道0接收数据长度#define RX_PW_P3 0x14 // 接收频道0接收数据长度#define RX_PW_P4 0x15 // 接收频道0接收数据长度#define RX_PW_P5 0x16 // 接收频道0接收数据长度#define FIFO_STATUS 0x17 // FIFO栈入栈出状态寄存器设置//*****************************************************************************void Delay(unsigned int s);void inerDelay_us(unsigned char n);void init_NRF24L01(void);uint SPI_RW(uint uchar);uchar SPI_Read(uchar reg);void SetRX_Mode(void);uint SPI_RW_Reg(uchar reg, uchar value);uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars);uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars);unsigned char nRF24L01_RxPacket(unsigned char* rx_buf);void nRF24L01_TxPacket(unsigned char * tx_buf);//*****************************************长延时void Delay(unsigned int s){unsigned int i;for(i=0; i<s; i++);for(i=0; i<s; i++);}//*****************************************************************************uint bdata sta; //状态标志sbit RX_DR =sta^6;sbit TX_DS =sta^5;sbit MAX_RT =sta^4;/******************************************************************************/*延时函数void inerDelay_us(unsigned char n){for(;n>0;n--)_nop_();}//*****************************************************************************/*NRF24L01初始化//*****************************************************************************/void init_NRF24L01(void){inerDelay_us(100);CE=0; // chip enableCSN=1; // Spi disableSCK=0; // Spi clock line init highSPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // 写本地地址SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, RX_ADDRESS, RX_ADR_WIDTH); // 写接收端地址SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 频道0自动ACK应答允许SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 允许接收地址只有频道0,如果需要多频道可以参考Page21SPI_RW_Reg(WRITE_REG + RF_CH, 0); // 设置信道工作为2.4GHZ,收发必须一致SPI_RW_Reg(WRITE_REG + RX_PW_P0, RX_PLOAD_WIDTH); //设置接收数据长度,本次设置为32字节SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); //设置发射速率为1MHZ,发射功率为最大值0dBSPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // IRQ收发完成中断响应,16位CRC ,主接收}/******************************************************************************/*函数:uint SPI_RW(uint uchar)/*功能:NRF24L01的SPI写时序/******************************************************************************uint SPI_RW(uint uchar){uint bit_ctr;for(bit_ctr=0;bit_ctr<8;bit_ctr++) // output 8-bit{MOSI = (uchar & 0x80); // output 'uchar', MSB to MOSIuchar = (uchar << 1); // shift next bit into MSB..SCK = 1; // Set SCK high..uchar |= MISO; // capture current MISO bitSCK = 0; // ..then set SCK low again}return(uchar); // return read uchar}/******************************************************************************/*函数:uchar SPI_Read(uchar reg)/*功能:NRF24L01的SPI时序/******************************************************************************uchar SPI_Read(uchar reg){uchar reg_val;CSN = 0; // CSN low, initialize SPI communication...SPI_RW(reg); // Select register to read from..reg_val = SPI_RW(0); // ..then read registervalueCSN = 1; // CSN high, terminate SPI communicationreturn(reg_val); // return register value}/*****************************************************************************//*功能:NRF24L01读写寄存器函数/*****************************************************************************/uint SPI_RW_Reg(uchar reg, uchar value){uint status;CSN = 0; // CSN low, init SPI transactionstatus = SPI_RW(reg); // select registerSPI_RW(value); // ..and write value to it..CSN = 1; // CSN high againreturn(status); // return nRF24L01 status uchar}/*****************************************************************************//*函数:uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars)/*功能: 用于读数据,reg:为寄存器地址,pBuf:为待读出数据地址,uchars:读出数据的个数/*****************************************************************************/uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars){uint status,uchar_ctr;CSN = 0; // Set CSN low, init SPI tranactionstatus = SPI_RW(reg); // Select register to write to and read status ucharfor(uchar_ctr=0;uchar_ctr<uchars;uchar_ctr++)pBuf[uchar_ctr] = SPI_RW(0); //CSN = 1;return(status); // return nRF24L01 status uchar}/******************************************************************************/*函数:uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars)/*功能: 用于写数据:为寄存器地址,pBuf:为待写入数据地址,uchars:写入数据的个数/*****************************************************************************/uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars){uint status,uchar_ctr;CSN = 0; //SPI使能status = SPI_RW(reg);for(uchar_ctr=0; uchar_ctr<uchars; uchar_ctr++) //SPI_RW(*pBuf++);CSN = 1; //关闭SPIreturn(status); //}/*****************************************************************************//*函数:void SetRX_Mode(void)/*功能:数据接收配置/*****************************************************************************/void SetRX_Mode(void){CE=0;// SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // IRQ收发完成中断响应,16位CRC ,主接收CE = 1;inerDelay_us(130);}/*****************************************************************************//*函数:unsigned char nRF24L01_RxPacket(unsigned char* rx_buf)/*功能:数据读取后放如rx_buf接收缓冲区中/*****************************************************************************/unsigned char nRF24L01_RxPacket(unsigned char* rx_buf){unsigned char revale=0;sta=SPI_Read(STATUS); // 读取状态寄存其来判断数据接收状况if(RX_DR) // 判断是否接收到数据{CE = 0; //SPI使能SPI_Read_Buf(RD_RX_PLOAD,rx_buf,TX_PLOAD_WIDTH);// read receive payload from RX_FIFO bufferrevale =1; //读取数据完成标志}SPI_RW_Reg(WRITE_REG+STATUS,sta); //接收到数据后RX_DR,TX_DS,MAX_PT都置高为1,通过写1来清楚中断标志return revale;}/******************************************************************************/*函数:void nRF24L01_TxPacket(unsigned char * tx_buf)/*功能:发送 tx_buf中数据/*****************************************************************************/void nRF24L01_TxPacket(unsigned char * tx_buf){CE=0; //StandBy I模式SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 装载接收端地址SPI_Write_Buf(WR_TX_PLOAD, tx_buf, TX_PLOAD_WIDTH); // 装载数据SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // IRQ收发完成中断响应,16位CRC,主发送CE=1; //置高CE,激发数据发送inerDelay_us(10);}//************************************串口初始化void StartUART( void ){ //波特率4800SCON = 0x50;TMOD = 0x20;TH1 = 0xFA;TL1 = 0xFA;PCON = 0x00;TR1 = 1;}//************************************通过串口将接收到数据发送给PC端void R_S_Byte(uchar R_Byte){SBUF = R_Byte;while( TI == 0 ); //查询法TI = 0;}//************************************主函数void main(void){uchar i,temp;uchar RxBuf[32];init_NRF24L01() ;StartUART();Delay(6000);while(1){SetRX_Mode();if(nRF24L01_RxPacket(RxBuf)){LED=0;temp++;for(i=0;i<32;i++){R_S_Byte(RxBuf[i]);Delay(600);}}LED=1;Delay(600);}}#include <reg52.h>#include <intrins.h>typedef unsigned char uchar;typedef unsigned char uint;//****************************************NRF24L01端口定义sbit MISO =P1^5;sbit MOSI =P1^1;sbit SCK =P1^6;sbit CE =P1^7;sbit CSN =P1^2;sbit IRQ =P1^0;//************************************按键sbit KEY1=P3^4;//************************************蜂明器sbit LED=P3^5;//***********************************发送缓冲区uchar TxBuf[32]={0x01,0x02,0x03,0x4,0x05,0x06,0x07,0x08,0x09,0x10,0x11,0x12,0x13,0x14,0x15,0x16,0x17,0x18,0x19,0x20,0x21,0x22,0x23,0x24,0x25,0x26,0x27,0x28,0x29,0x30,0x31,0x32,}; ////*********************************************NRF24L01*********************** #define TX_ADR_WIDTH 5 // 5 uints TX address width#define RX_ADR_WIDTH 5 // 5 uints RX address width#define TX_PLOAD_WIDTH 32 // 20 uints TX payload#define RX_PLOAD_WIDTH 32 // 20 uints TX payloaduint const TX_ADDRESS[TX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x01}; //本地地址uint const RX_ADDRESS[RX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x01}; //接收地址//***************************************NRF24L01寄存器指令#define READ_REG 0x00 // 读寄存器指令#define WRITE_REG 0x20 // 写寄存器指令#define RD_RX_PLOAD 0x61 // 读取接收数据指令#define WR_TX_PLOAD 0xA0 // 写待发数据指令#define FLUSH_TX 0xE1 // 冲洗发送 FIFO指令#define FLUSH_RX 0xE2 // 冲洗接收 FIFO指令#define REUSE_TX_PL 0xE3 // 定义重复装载数据指令#define NOP 0xFF // 保留//*************************************SPI(nRF24L01)寄存器地址#define CONFIG 0x00 // 配置收发状态,CRC校验模式以及收发状态响应方式#define EN_AA 0x01 // 自动应答功能设置#define EN_RXADDR 0x02 // 可用信道设置#define SETUP_AW 0x03 // 收发地址宽度设置#define SETUP_RETR 0x04 // 自动重发功能设置#define RF_CH 0x05 // 工作频率设置#define RF_SETUP 0x06 // 发射速率、功耗功能设置#define STATUS 0x07 // 状态寄存器#define OBSERVE_TX 0x08 // 发送监测功能#define CD 0x09 // 地址检测#define RX_ADDR_P0 0x0A // 频道0接收数据地址#define RX_ADDR_P1 0x0B // 频道1接收数据地址#define RX_ADDR_P2 0x0C // 频道2接收数据地址#define RX_ADDR_P3 0x0D // 频道3接收数据地址#define RX_ADDR_P4 0x0E // 频道4接收数据地址#define RX_ADDR_P5 0x0F // 频道5接收数据地址#define TX_ADDR 0x10 // 发送地址寄存器#define RX_PW_P0 0x11 // 接收频道0接收数据长度#define RX_PW_P1 0x12 // 接收频道0接收数据长度#define RX_PW_P2 0x13 // 接收频道0接收数据长度#define RX_PW_P3 0x14 // 接收频道0接收数据长度#define RX_PW_P4 0x15 // 接收频道0接收数据长度#define RX_PW_P5 0x16 // 接收频道0接收数据长度#define FIFO_STATUS 0x17 // FIFO栈入栈出状态寄存器设置//*****************************************************************************void Delay(unsigned int s);void inerDelay_us(unsigned char n);void init_NRF24L01(void);uint SPI_RW(uint uchar);uchar SPI_Read(uchar reg);void SetRX_Mode(void);uint SPI_RW_Reg(uchar reg, uchar value);uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars);uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars);unsigned char nRF24L01_RxPacket(unsigned char* rx_buf);void nRF24L01_TxPacket(unsigned char * tx_buf);//*****************************************长延时void Delay(unsigned int s){unsigned int i;for(i=0; i<s; i++);for(i=0; i<s; i++);}//*****************************************************************************uint bdata sta; //状态标志sbit RX_DR =sta^6;sbit TX_DS =sta^5;sbit MAX_RT =sta^4;/******************************************************************************/*延时函数/*****************************************************************************/void inerDelay_us(unsigned char n){for(;n>0;n--)_nop_();}//*****************************************************************************/*NRF24L01初始化//****************/void init_NRF24L01(void){inerDelay_us(100);CE=0; // chip enableCSN=1; // Spi disableSCK=0; // Spi clock line init highSPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // 写本地地址SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, RX_ADDRESS, RX_ADR_WIDTH); // 写接收端地址SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 频道0自动ACK应答允许SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 允许接收地址只有频道0,如果需要多频道可以参考Page21SPI_RW_Reg(WRITE_REG + RF_CH, 0); // 设置信道工作为2.4GHZ,收发必须一致SPI_RW_Reg(WRITE_REG + RX_PW_P0, RX_PLOAD_WIDTH); //设置接收数据长度,本次设置为32字节SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); //设置发射速率为1MHZ,发射功率为最大值0dBSPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // IRQ收发完成中断响应,16位CRC,主发送}/**************/*函数:uint SPI_RW(uint uchar)/*功能:NRF24L01的SPI写时序/******************/uint SPI_RW(uint uchar){uint bit_ctr;for(bit_ctr=0;bit_ctr<8;bit_ctr++) // output 8-bit{MOSI = (uchar & 0x80); // output 'uchar', MSB to MOSI uchar = (uchar << 1); // shift next bit into MSB..SCK = 1; // Set SCK high..uchar |= MISO; // capture current MISO bitSCK = 0; // ..then set SCK low again}return(uchar); // return read uchar}/********************/*函数:uchar SPI_Read(uchar reg)/*功能:NRF24L01的SPI时序/********************/uchar SPI_Read(uchar reg){uchar reg_val;CSN = 0; // CSN low, initialize SPI communication... SPI_RW(reg); // Select register to read from..reg_val = SPI_RW(0); // ..then read registervalueCSN = 1; // CSN high, terminate SPI communicationreturn(reg_val); // return register value}/*******************//*功能:NRF24L01读写寄存器函数/*********************/uint SPI_RW_Reg(uchar reg, uchar value){uint status;CSN = 0; // CSN low, init SPI transactionstatus = SPI_RW(reg); // select registerSPI_RW(value); // ..and write value to it..CSN = 1; // CSN high againreturn(status); // return nRF24L01 status uchar}/*********************//*函数:uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars)/*功能: 用于读数据,reg:为寄存器地址,pBuf:为待读出数据地址,uchars:读出数据的个数/*********************/uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars){uint status,uchar_ctr;CSN = 0; // Set CSN low, init SPI tranactionstatus = SPI_RW(reg); // Select register to write to and read status ucharfor(uchar_ctr=0;uchar_ctr<uchars;uchar_ctr++)pBuf[uchar_ctr] = SPI_RW(0); //CSN = 1;return(status); // return nRF24L01 status uchar}/**************************/*函数:uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars)/*功能: 用于写数据:为寄存器地址,pBuf:为待写入数据地址,uchars:写入数据的个数/**************************/uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars){uint status,uchar_ctr;CSN = 0; //SPI使能status = SPI_RW(reg);for(uchar_ctr=0; uchar_ctr<uchars; uchar_ctr++) //SPI_RW(*pBuf++);CSN = 1; //关闭SPIreturn(status); //}/********************//*函数:void SetRX_Mode(void)/*功能:数据接收配置/**********************/void SetRX_Mode(void){CE=0;SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // IRQ收发完成中断响应,16位CRC ,主接收inerDelay_us(130); //延时不能太短}/**********************//*函数:unsigned char nRF24L01_RxPacket(unsigned char* rx_buf)/*功能:数据读取后放如rx_buf接收缓冲区中/***********************/unsigned char nRF24L01_RxPacket(unsigned char* rx_buf){unsigned char revale=0;sta=SPI_Read(STATUS); // 读取状态寄存其来判断数据接收状况if(RX_DR) // 判断是否接收到数据{CE = 0; //SPI使能SPI_Read_Buf(RD_RX_PLOAD,rx_buf,TX_PLOAD_WIDTH);// read receive payload from RX_FIFO bufferrevale =1; //读取数据完成标志}SPI_RW_Reg(WRITE_REG+STATUS,sta); //接收到数据后RX_DR,TX_DS,MAX_PT都置高为1,通过写1来清楚中断标志return revale;}/****************************/*函数:void nRF24L01_TxPacket(unsigned char * tx_buf)/*功能:发送 tx_buf中数据/****************************/void nRF24L01_TxPacket(unsigned char * tx_buf){CE=0; //StandBy I模式SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 装载接收端地址SPI_Write_Buf(WR_TX_PLOAD, tx_buf, TX_PLOAD_WIDTH); // 装载数据// SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // IRQ收发完成中断响应,16位CRC,主发送CE=1; //置高CE,激发数据发送inerDelay_us(10);}//************************************主函数void main(void){uchar temp =0;init_NRF24L01() ;nRF24L01_TxPacket(TxBuf); // Transmit Tx buffer dataDelay(6000);P0=0xBF;{nRF24L01_TxPacket(TxBuf); // Transmit Tx buffer data LED=0;Delay(10000); //可变SPI_RW_Reg(WRITE_REG+STATUS,0XFF);LED=1;Delay(8000);}}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
uchar DATA = 0x01;
uchar bdata sta;
unsigned int a,k; //定时器延时参数
uchar mark; //传感器响应标志位
uchar mark1;//延时标志位
sbit RX_DR= sta^6;//接受数据成功标志位
描述:
语音模块发送地址信号
/**************************************************/
void sendadd(unsigned char addr)
{
uchar i;
SDA=0;
delayms(5);/*数据信号置于低电平5ms */
for(i=0;i<8;i++)
sbit TX_DS= sta^5;//发送成功标志位
sbit MAX_RT = sta^4;//最大重发上限标志位
sbit HW=P2^0;//红外感应模块输入端
sbit ZD=P1^7;//震动传感器输入端
sbit LED=P2^1; //LED报警器输出端
sbit SDA=P2^4; //语音模块数据控制端
{
uchar status, i;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); //选择寄存器,同时返回状态字
for(i=0; i<bytes; i++)
SPI_RW(pBuf[i]); //逐个字节写入nRF24L01
CSN = 1; // CSN拉高,结束数据传输
{ SDA=1;
if(addr & 1)
{delayus(60);/*高电平比低电平为600us:200us,表示发送数据1 */
SDA=0;
delayus(20);
}
else
{
delayus(20);
SDA=0;/*高电平比低电平为200us:600us,表示发送数据0 */
delayus(60);
reg_val = SPI_RW(0); //然后从该寄存器读数据
CSN = 1; // CSN拉高,结束数据传输
return(reg_val); //返回寄存器数据
}
/**************************************************/
/**************************************************
函数:SPI_RW_Reg()
描述:
写数据value到reg寄存器
/**************************************************/
uchar SPI_RW_Reg(uchar reg, uchar value)
{
uchar status;
CSN = 0; // CSN置低,开始传输数据
函数:init_io()
描述:
nRF24L01初始化程序
/**************************************************/
void init_io(void)
{
CE = 0; //待机
CSN = 1; // SPI禁止
SCK = 0; // SPI时钟置低
IRQ = 1; //中断复位
{
uchar status, i;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); //选择寄存器,同时返回状态字
for(i=0; i<bytes; i++)
pBuf[i] = SPI_RW(0); //逐个字节从nRF24L01读出
CSN = 1; // CSN拉高,结束数据传输
发语音地址信号发送报警信号语音循环播放开蜂鸣器led收到数据跳出报警关语音电源关闭声光判断是否接受到数据函数
/**************************************************
基于单片机无线报警系统主机(机载设别)系统程序
/**************************************************/
return(status); //返回状态寄存器
}
/**************************************************/
/**************************************************
函数:SPI_Write_Buf()
描述:
函数:clear()
描述:
清TX_FIFO寄存器
/**************************************************/
void clear()
{
CSN=0;
SPI_RW(FLUSH_TX);
CSN=1;
}
/**************************************************
uchar SPI_RW(uchar byte)
{
uchar i;
for(i=0; i<8; i++) //循环8次
{
MOSI = (byte & 0x80); // byte最高位输出到MOSI
byte <<= 1; //低一位移位到最高位
SCK = 1; //拉高SCK,nRF24L01从MOSI读入1位数据,同时从MISO输出1位数据
}
addr>>=1;
}
SDA=1;
}
/**************************************************
函数:SPI_RW()
描述:
根据SPI协议,写一字节数据到nRF24L01,同时从nRF24L01
读出一字节
/**************************************************/
status = SPI_RW(reg); //选择寄存器,同时返回状态字
SPI_RW(value); //然后写数据到该寄存器
CSN = 1; // CSN拉高,结束数据传输
return(status); //返回状态寄存器
}
/**************************************************
FM=ZD=mark=ONN=1;
flag=mark1=0;
函数:SPI_Read()
描述:
从reg寄存器读一字节
/**************************************************/
uchar SPI_Read(uchar reg)
{
uchar reg_val;
CSN = 0; // CSN置低,开始传输数据
SPI_RW(reg); //选择寄存器
函数:TX_Mode()
描述:
这个函数设置nRF24L01为发送模式,(CE=1持续至少10us),
130us后启动发射,数据发送结束后,发送模块自动转入接收
模式等待应答信号。
/**************************************************/
void TX_Mode(uchar * BUF)
函数:SPI_Read_Buf()
描述:
从reg寄存器读出bytes个字节,通常用来读取接收通道
数据或接收/发送地址
/**************************************************/
uchar SPI_Read_Buf(uchar reg, uchar * pBuf, uchar bytes)
void delayus(unsigned int t)
{
while(t--);
}
/**************************************************
函数:delayms()
描述:
延迟x毫秒
/**************************************************/
把pBuf缓存中的数据写入到nRF24L01,通常用来写入发
射通道数据或接收/发送地址
/**************************************************/
uchar SPI_Write_Buf(uchar reg, uchar * pBuf, uchar bytes)
byte |= MISO;//读MISO到byte最低位
SCK = 0;// SCK置低
}ห้องสมุดไป่ตู้
return(byte);//返回读出的一字节
}
/**************************************************/
/**************************************************
函数:init_ZD()
描述:
中断初始化程序
/**************************************************/
void init_ZD(void)
{
IT0=0;//低电平触发
EA=1;
EX0=1;//中断允许
}
/**************************************************