自动控制原理课程设计-火炮跟踪随动控制系统-精品
舰载火箭炮伺服控制系统设计

舰载火箭炮伺服控制系统设计摘要:本文介绍一种舰载火箭炮伺服控制系统,基于PID控制算法,叠加前馈控制器输出提高控制系统的响应速度,根据fuzzy控制动态调整PID的比例、积分、微分参数保证控制系统的稳态精度,减小系统超调量,该控制系统具有稳定性高、响应速度快、精度高、安全性高等特点。
关键词:伺服控制;PID;fuzzy控制;前馈1.引言火箭炮是舰船武器系统的重要组成部分,火舰炮的控制精度和响应速度直接影响武器系统对目标的打击精度。
舰船武器系统主要包含火控、光瞄、火箭炮、时统等分系统,各分系统通过时统中断对时,火控台则控制各分系统协同工作,确保同一中断周期内的各分系统的数据时效性。
火控台接收光瞄设备提供的目标历史位置、弹道和海况信息解算出发射方位角、俯仰角等信息,火箭炮根据火控台提供的角度信息控制伺服调转。
1.火箭炮控制系统组成和工作原理火箭炮伺服系统分为主控模块、伺服驱动器、采样模块、安全监控模块、发射装置等,主控模块用于接收时统中断和火控台的角度指令,并控制伺服驱动器驱动发射装置调转至目标角度。
采样模块采集发射装置角度,将角度反馈给主控模块。
在调转过程中,安全监控模块实时监控发射装置状态信息,在装置过冲、过载等异常情况下,控制伺服驱动输出抱闸信号,急停发射装置。
火箭炮控制系统组成如图1所示。
图1火箭炮控制系统组成本文讨论的舰载火箭炮使用场景主要如下:1)接收火控台瞄准指令,火箭炮需要快速瞄准静态目标,等待火控台进一步指令;2)接收火控台预瞄准指令,火箭炮预调转至目标附近,根据火控台后续伺服调转指令,动态跟踪目标的运动。
根据以上使用场景,1.控制系统模型传统的PID算法难以同时满足控制系统的动态和稳态特性,为了同时保证火箭炮的响应速度和稳态精度,伺服系统控制模型采用基于PID的fuzzy+前馈控制。
PID控制用于保证火箭炮的稳态跟踪精度,模糊控制和前馈提高火箭炮的响应速度,控制模型结构图如图2所示。
多管火箭炮伺服随动系统设计及仿真

作者简介:周超(1986—),女,江苏镇江人,硕士研究生,研究方向为智能控制。
多管火箭炮伺服随动系统设计及仿真周超,张龙(南京理工大学机械工程学院,江苏南京210094)摘要:以某多管火箭炮伺服随动系统为背景,建立了系统的数学模型。
为满足系统高速高精度的位置控制,设计了复合模糊PID 控制器。
仿真结果表明该方法可以有效地提高火箭炮的自适应能力和鲁棒性,保证了目标跟踪精度。
关键词:多管火箭炮;模糊PID ;仿真中图分类号:TH12;TP391.9文献标志码:A文章编号:1671-5276(2012)03-0091-02Design and Simulation of Servo System for Multiple Rocket LaunchersZHOU Chao ,ZHANG Long(School of Mechanical Engineering ,Nanjing University of Science and Technology ,Nanjing 210094,China )Abstract :This paper takes the servo sysytem fo multi-barrel rocket launchers as the background and builds its mathematical model.To meet the high-speed and high-precision position control of this system ,it also designs the composite fuzzy PID controller.The simulation results show that the method is used to effectively improve the rocket ’s adaptive ability and robustness and ensure the ac-curacy of target tracking.Key words :multiple rocket launchers ;fuzzy PID ;simulation0引言火箭炮通常为多管联装,是炮兵的主要火力压制武器之一,具有结构简单、火力猛、射速高、反应快和突袭性好的特点,多用于对地面目标实施射击。
《自动控制原理》课程设计位置随动系统的超前校正
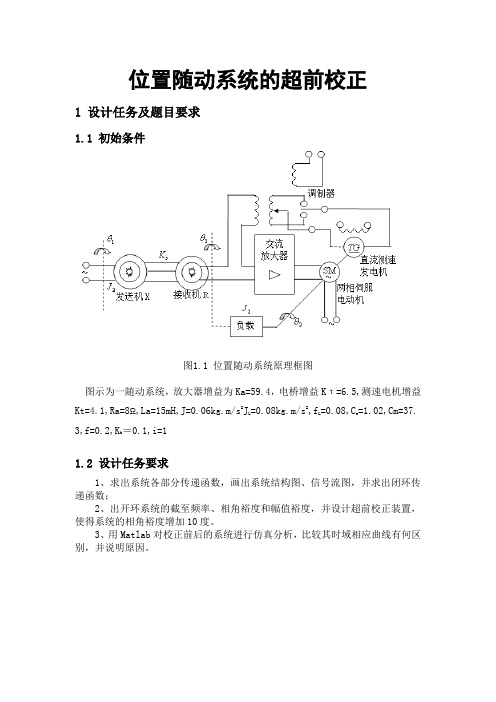
位置随动系统的超前校正1 设计任务及题目要求1.1 初始条件图1.1 位置随动系统原理框图图示为一随动系统,放大器增益为Ka=59.4,电桥增益Kτ=6.5,测速电机增益Kt=4.1,Ra=8Ω,La=15mH,J=0.06kg.m/s2JL =0.08kg.m/s2,fL=0.08,Ce=1.02,Cm=37.3,f=0.2,Kb=0.1,i=11.2 设计任务要求1、求出系统各部分传递函数,画出系统结构图、信号流图,并求出闭环传递函数;2、出开环系统的截至频率、相角裕度和幅值裕度,并设计超前校正装置,使得系统的相角裕度增加10度。
3、用Matlab对校正前后的系统进行仿真分析,比较其时域相应曲线有何区别,并说明原因。
2 位置随动系统原理2.1 位置随动系统工作原理工作原理:该系统为一自整角机位置随动系统,用一对自整角机作为位置检测元件,并形成比较电路。
发送自整角机的转自与给定轴相连;接收自整角机的转子与负载轴(从动轴)相连。
TX 与TR 组成角差测量线路。
若发送自整角机的转子离开平衡位置转过一个角度1θ,则在接收自整角机转子的单相绕组上将感应出一个偏差电压e u ,它是一个振幅为em u 、频率与发送自整角机激励频率相同的交流调制电压,即sin e em u u t ω=⋅在一定范围内,em u 正比于12θθ-,即12[]em e u k θθ=-,所以可得12[]sin e e u k t θθω=-这就是随动系统中接收自整角机所产生的偏差电压的表达式,它是一个振幅随偏差(12θθ-)的改变而变化的交流电压。
因此,e u 经过交流放大器放大,放大后的交流信号作用在两相伺服电动机两端。
电动机带动负载和接收自整角机的转子旋转,实现12θθ=,以达到跟随的目的。
为了使电动机转速恒定、平稳,引入了测速负反馈。
系统的被控对象是负载轴,被控量是负载轴转角2θ,电动机施执行机构,功率放大器起信号放大作用,调制器负责将交流电调制为直流电供给直流测速发电机工作电压,测速发电机是检测反馈元件。
自动控制原理课程设计
前言一般来说,随动控制系统要求有好的跟随性能。
位置随动系统是非常典型的随动系统,是个位置闭环反馈系统,系统中具有位置给定,位置检测和位置反馈环节,这种系统的各种参数都是连续变化的模拟量,其位置检测可用电位器、自整角机、旋转变压器、感应同步器等。
位置随动系统中的给只给定量是经常变动的,是一个随机量,并要求输出量准确跟随给定量的变化,输出响应具有快速性、灵活性和准确性。
为了保证系统的稳定性,并具有良好的动态性能,必须设有校正装置,如在正向通道中设置串联校正装并联校正装置等,为了提高位置随动系统的控制精度,还需要增加系统的开环放大倍数或在系统中增加积分环节等。
坦克火控系统等控制系统归根结底主要是依赖于位置随动系统的控制问题,其根本任务就是以足够的控制精度通过执行机构实现被控目标即输出位置对给定量即输入位置的及时和准确的跟踪。
1.控制系统的设计步骤根据综述所述,坦克火炮控制系统可抽象为位置随动系统,主要解决位置跟随的控制问题,其根本任务就是通过执行机构实现被控量即输出位置对给定量即输入位置的及时和准确的跟踪,并要求具有足够的控制精度。
根据设计任务的要求,本设计采用双闭环系统,实现输出信号对输入信号的跟踪和复现。
初步设计的环节如下角差检测装置可以选择电位器组成的检测器,或者自整角机检测装置。
有两个运算放大器环节:第一个运放为角差检测装置,它可以选择可以选择电位器组成的检测器,或者自整角机检测装置。
第二个运算放大器:给定电压与反馈电压在此合成,产生偏差电压,将经过该运算放大器放大。
功率放大器:给定电压与反馈电压在此合成,产生偏差电压,经过放大器放大。
执行部件:系统中执行元件可选用电枢控制直流伺服电动机和两相伺服电动机,电枢控制的直流伺服电动机在控制系统中广泛用作执行机构,能够实现对被控对象的机械运动的快速控制。
减速器:减速器对随动系统的工作有重大影响,减速器速比的选择和分配将影响到系统的惯性矩,并影响到快速性。
《自动控制原理》课后习题章节测试满分答案
绪论单元测试1【判断题】(100 分)自动控制理论经历了经典控制理论、现代控制理论和近代控制理论三个发展阶段。
A.错B.对第一章测试1【单选题】(10 分)下列系统中属于开环控制的为()。
A.家用空调器B.普通车床C.无人驾驶车D.自动跟踪雷达2【单选题】(10 分)下列系统属于闭环控制系统的为()。
A.家用电冰箱B.传统交通红绿灯控制C.自动流水线D.普通车床3【单选题】(10 分)下列系统属于定值控制系统的为()。
A.自动跟踪雷达B.自动化流水线C.家用空调D.家用微波炉4【单选题】(10 分)下列系统属于随动控制系统的为()。
A.火炮自动跟踪系统B.家用空调器C.自动化流水线D.家用电冰箱5【单选题】(10 分)下列系统属于程序控制系统的为()。
A.传统交通红绿灯控制B.火炮自动跟踪系统C.家用空调器D.普通车床6【单选题】(10 分)()为按照系统给定值信号特点定义的控制系统。
A.连续控制系统B.离散控制系统C.线性控制系统D.随动控制系统7【单选题】(10 分)下列不是对自动控制系统性能的基本要求的是()。
A.准确性B.快速性C.稳定性D.复现性8【单选题】(10 分)下列不是自动控制系统基本方式的是()。
A.开环控制B.复合控制C.闭环控制D.前馈控制9【单选题】(10 分)下列不是自动控制系统的基本组成环节的是()。
A.测量变送器B.控制器C.被控变量D.被控对象10【单选题】(10 分)自动控制系统不稳定的过度过程是()。
A.发散振荡过程B.其余选择都不是C.单调过程D.衰减振荡过程第二章测试1【单选题】(10 分)自动控制系统的数学模型为()。
A.热学方程B.梅森公式C.微分方程、传递函数、动态结构框图、信号流图D.状态方程、差分方程2【单选题】(10 分)以下关于传递函数的描述,的是()。
A.传递函数取决于系统和元件的结构和参数,并与外作用及初始条件有关B.传递函数是一种动态数学模型C.传递函数是复变量的有理真分式函数D.一定的传递函数有一定的零极点分布图与之相对应3【单选题】(10 分)系统的传递函数是由系统的()决定的。
自动控制原理答案——第一章

第1章 习 题1-1 日常生活中存在许多控制系统,其中洗衣机的控制是属于开环控制还是闭环控制?卫生间抽水马桶水箱蓄水量的控制是开环控制还是闭环控制?解:洗衣机的洗衣过程属于开环控制,抽水马桶的蓄水控制属于闭环控制。
1-2 用方块图表示驾驶员沿给定路线行驶时观察道路正确驾驶的反馈过程。
解:驾驶过程方块图如图 所示。
图 驾驶过程方块图1-3自动热水器系统的工作原理如图T1.1所示。
水箱中的水位有冷水入口调节阀保证,温度由加热器维持。
试分析水位和温度控制系统的工作原理,并以热水出口流量的变化为扰动,画出温度控制系统的原理方块图。
图T1.1 习题1-3图解:水位控制:输入量为预定的希望水位,设为H r, 被控量为水箱实际水位,设为H。
当H=H r时,浮子保持一定位置,冷水调节阀保持一定开度,进水量=出水量,水位保持在希望水位上。
当出水量增加时,实际水位下降,浮子下沉,冷水入口调节阀开大,进水量增加,水位上升直到H=H r。
同理,当出水量减少时,实际水位上升,浮子上升,冷水入口调节阀关小,进水量减少,水位下降直到H=H r。
温度控制:在热水电加热器系统中,输入量为预定的希望温度(给定值),设为T r,被控量(输出量)为水箱实际水温,设为,控制对象为水箱。
扰动信号主要是由于放出热水并注入冷水而产生的降温作用。
当T=T r时,温控开关断开,电加热器不工作,此时水箱中水温保持在希望水温上。
当使用热水时,由于扰动作用使实际水温下降,测温元件感受T<T r的变化,并把这一温度变化转换为电信号使温控开关接通电源工作,电加热器工作,使水箱中的水温上升,直到T=T r为止。
温度控制系统的原理方块图如图 所示。
图 热水电加热器控制原理方块图1-4 仓库大门自动开闭系统原理示意图如图T1.2所示。
试说明自动控制大门开闭的工作原理并画出原理方块图。
图T1.2 习题1-4图解:当合上开门开关时,电位器桥式测量电路的偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起,与此同时,和大门连在一起的电刷也向上移动。
精品文档-自动控制原理(李素玲)-第1章

21
(5)执行元件:其职能是直接推动被控对象,使其被控 量发生变化。用来作为执行元件的有阀门、电动机、液压电 动机等。
(6)校正元件:也叫补偿元件,它是结构或参数便于调 整的元部件,用串联或并联(反馈)的方式连接于系统中,以 改善系统的性能。最简单的校正元件是电阻、电容组成的无 源或有源网络,复杂的则可用计算机构成数字控制器。
17
(6)反馈量:由系统输出端取出并反向送回系统输入端 的信号。反馈有主反馈和局部反馈之分。
(7)偏差量:给定量与主反馈信号之差。 (8)自动控制系统:由被控对象和控制器按一定方式连 接起来的、完成一定自动控制任务的有机整体。
18
1.2.2 自动控制系统的基本组成 自动控制系统根据被控对象和具体用途的不同,可以有
各种不同的结构形式。但是,从工作原理来看,自动控制系 统通常是由一些具有不同职能的基本元件所组成。图1-3所 示为典型的反馈控制系统的基本组成,图中各元件的职能如 下:
19 图1-3 反馈控制系统的基本组成
20
(1)给定元件:其职能是给出与期望的被控量相对应的 系统输入量。给定元件一般为电位器。
24 图1-4 开环直流调速系统
25 图1-5 开环直流调速系统方框图
26
图1-4中开环系统的输入量是给定电压ug,输出量是转 速n。电动机励磁电压为常数,采用电枢控制方式。调整给 定电位器滑臂的位置,可得到不同的给定电压ug,放大后得 到不同的电枢电压ua,从而控制电机转速n。当负载转矩不变 时,给定电压ug与电机转速n有一一对应关系。因此,可由给 定电压直接控制电动机转速。如果出现扰动,如负载转矩增 加,电动机转速便随之降低而偏离要求值。
10
1.人工控制 如图1-1所示为人工控制水位保持恒定的供水系统。水 池中的水源源不断地经出水管道流出,以供用户使用。随着 用水量的增多,水池中的水位必然下降。这时,若要保持水 位高度不变,就得开大进水阀门,增加进水量以作补充。因 此,进水阀门的开度是根据实际水位的多少进行操作的。上 述过程由人工操作实现的正确步骤是:操作人员首先将要求 水位牢记在大脑中,然后用眼睛和测量工具测量水池的实际 水位,并将实际水位与要求水位在大脑中进行比较、计算, 从而得出误差值;再按照误差的大小和正负性质,由大脑指 挥手去调节进水阀门的开度,使实际水位尽量与要求水位相 等。
火炮随动控制平台的设计

火炮随动控制平台的设计DOI :10.19557/ki.1001-9944.2019.05.007刘叶楠,陈超波,张峰(西安工业大学电子信息工程学院,西安710021)摘要:在现代火炮控制操作中,为了满足作战的需要,往往需要对火炮的模式选择(开环、闭环)、射速、电机位置等多个参数进行设置。
通过探讨研究,综合国内外相应控制系统的特点,该文设计了一种新型的基于CAN 总线的炮控随动系统。
该系统不仅可以实现自检功能,位置信息的采集与存储功能,还可以对火炮进行相关参数设置以及对火炮的控制功能。
关键词:火炮控制;参数设置;CAN 总线;采集与存储中图分类号:TN914.3文献标志码:A文章编号:1001⁃9944(2019)05⁃0027⁃05Design of Artillery Servo Control PlatformLIU Ye ⁃nan ,CHEN Chao ⁃bo ,ZHANG Feng(School of Electronic Information Engineering ,Xi ’an Technological University ,Xi ’an 710021,China )Abstract :In the progress of artillery control ,several parameters should be set up to meet the needs of the war ,such as mode selection (open loop ,closed loop ),firing speed ,motor position and so on.A new type of gun control servo system based on CAN bus is designed through researching the characteristics of the control system in this paper.The system can not only realize the function of self inspection ,the acquisition and storage of position information ,butalso set the parameters of the artillery and the control of artillery.Key words :artillery control ;parameter setting ;CAN bus ;acquisition and storage收稿日期:2019-01-17;修订日期:2019-03-27基金项目:国家自然科学基金项目(61271362);陕西省科技厅一般项目⁃工业领域(2017GY ⁃081);陕西省自然科学基金项目(2017JM6041);西安市科技计划项目(CXY1341(1));陕西省教育厅科技专项项目(2017JK0373)作者简介:刘叶楠(1987—),男,硕士,讲师,研究方向为模式识别与智能系统、数据融合;陈超波(1978—),男,教授,硕士研究生导师,研究方向为容错控制与故障诊断、光伏发电;张峰(1979—),男,教授,硕士研究生导师,研究方向为现代信号处理、现代通信技术及嵌入式应用开发。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计名称:自动控制原理课程设计题目:火炮跟踪随动控制系统专业:班级:姓名:学号:课程设计任务书一、设计题目:车载武器随动系统设计二、设计任务:设计一个随动系统,使其发射端口在要求的精度和时间X围内跟踪目标.三、设计计划:1.查阅相关资料2.确定设计方案3.进展设计并定稿四、设计要求:要求设计的随动系统在跟踪过程有足够的稳定性与快速性指导教师:徐建华教研室主任:徐建华时间:2011年12月9 日中国矿业大学某某学院课程设计成绩评定表摘要随动控制系统又名伺服控制系统。
其参考输入是变化规律未知的任意时间函数。
随动控制系统的任务是使被控量按同样规律变化并与输入信号的误差保持在规定X围内。
这种系统在军事上应用最为普遍.如导弹发射架控制系统,雷达天线控制系统等。
其特点是输入为未知。
本文对一个随动系统进展研究,在准确把握研究的方向根底上,始终以系统的高运行性能为目标,在控制系统的稳定性,快速性,准确性这三者之间的固有矛盾中寻找最优的平衡点。
通过建立模型,元件确定,参数分析,串联校正四大模块,整合自动控制理论的各个知识点,包含了经典控制理论的大局部内容,知识点相互穿插,严密联系,并有机结合成一篇完整的论文。
目录一系统设计的步骤――――――――――――――――――――――――― 1 1.1 设计方案―――――――――――――――――――――――――――1―――――――――――――――――――― 1 ――――――――――――――――――――――――11.2 系统的方框图与开环传函――――――――――――――――――――52.1系统方框图――――――――――――――――――――――――――52.2系统开环传函―――――――――――――――――――――――――61.3 火炮系统的工作过程――――――――――――――――――――――6 1.4 性能指标确实定――――――――――――――――――――――――6 二控制系统方案和主要元部件的选择―――――――――――――――――72.1 系统方案―――――――――――――――――――――――――――7 2.2 元部件选择――――――――――――――――――――――――――7 三开环增益和静态误差计算―――――――――――――――――――――83.1 系统无测速反响――――――――――――――――――――――――8 3.2 系统参加测速反响―――――――――――――――――――――――8――――――――――――――――――――――――9 ――――――――――――――――――――――――9 ―――――――――――――――――――――――――10 3.3 静态误差的计算――――――――――――――――――――――――11 四动态分析和校正装置的设计――――――――――――――――――――13 五结论――――――――――――――――――――――――――――――15 六设计体会――――――――――――――――――――――――――――16 七参考文献――――――――――――――――――――――――――――17一系统设计的步骤1.1设计方案(1)控制任务:控制火炮跟踪目标,确定目标位置,适时开炮击中目标。
(2)被控对象:火炮。
(3)被控量:火炮轴转角θ2,即自整角机接收机转子转角。
(4)给定输入:自整角机发送机转角θ1。
(5)干扰输入:电源电压变化,电机激磁电流变化,电机负载转动力矩变化。
(6)偏差量:θ1-θ2称为角差。
(7)控制过程:消除θ1-θ2的角差与上述干扰输入影响的过程就是对火炮方位角的控制过程。
(8)执行元件:控制动作发出者,直流伺服电动机,把所收到的电信号转换成电动机轴上的角位移(角速度)输出。
(9)控制量:直流伺服电动机的电枢电压ua〔也是功率放大器的输出〕。
以上为本系统必须具备的框架,在这个框架的根底上进展下面的进一步分析。
(1) 电位器电位器是一种把线位移角位移变换成电压量的装置。
本系统中,采用了一对电位器组成误差检测器,其中上边的电位器用作输入信号的承受装置,下边的电位器用作电动机驱动火炮引起的角度改变的检测装置,反响到输入端,与输入电位器进展同相连接,得到的电压作为误差信号输人到前向通道中去 (如图1) 。
图1-1 电位器由图可以得出输出电压为1211121()()()()()()u t u t u t K t K t K t θθθ=-=-=∆其中1max /K E θ=,是单位角位移对应的输出电压,称电位器传递系数。
当雷达检测到外界目标的坐标位置时,把位置信号转换成电压信号,再输入到给定电位器中,就实现了信号的变换功能。
图1-2 电位器结构图(2) 运算放大器I 用做电压放大信号,由电位器得到的误差信号为微弱信号需要经过运算放大器的放大,才能得到有用信号。
图1-3 运放I由图可以得出输出电压为32()()u t K u t =K 1其中2K 为运放I 的放大倍数,2/f i K R R =。
U 3U图1-4 运放1结构图(3) 运算放大器I I 用作有源滤波装置,由于输入为随动信号,而执行元件为直流电机,电枢电压为直流信号,故需要在前向通道的前端参加有源滤波电路,滤除高频信号和干扰信号,保证系统的稳定性。
图1-5 运放II由图可以得出输出与输入之间的关系为4311(1)11f uf u R K U sCK U R Ts R sC==+=++其中1(1)f uf R K R =+为通带放大倍数,T=RC 为时间常数。
3U 4U图1-6 运放II 结构图(4) 功率放大电路 本系统采用晶闸管整流装置,包括触发电路和晶闸管主电路。
忽略晶闸管控制电路的时间滞后,其输入输出的方程为K 21uf K Ts+34a u K u =式中3K 为比例系数。
4U a U图1-7 功放结构图(5) 直流电动机 图1-8表示磁场固定不变(激磁电流I f =常数),用电枢电压来控制的直流电动机。
设它的控制输入为电枢电压u a ,它的输出轴角位移(用在位置随动系统时)或角速度(用在转速控制系统时)为输出,负载转矩M L 变化为主要扰动。
现欲求输入与输出关系微分方程式。
考虑一般电机补偿是良好的,在反响速度不是很快的场合,可以不计电枢反响、涡流效应和磁滞影响;当I f 为常值时,磁场不变,并认为电机绕组温度在瞬变过程中是不变的。
如此假设在工程上是允许的。
图1-8 电枢电压控制的直流电动机电枢电压控制的直流电动机微分方程式'mm a c c dwT w K u K M dt+=- 式中系数均为折算到电动机轴上的等效值,()/m a m a m m e T R J R f C C =+。
如此忽略负载的拉氏变换为()()()1ma m K s U s s T s Θ=+K 3aUaUaU Θ图1-9 直流电动机的结构图(6) 测速电机 图1-10为永磁式直流测速电机,在电枢两端输出与转子角速度成正比的直流电压,即()()td t u t K dtθ= t K 为测速发电机的输出斜率。
图1-10 直流测速电机从上图中得到 ΘU图1-11 测速电机的结构图将以上根本元件按顺序依次组装连接,可以得到这个系统的连接实物原理图1-12()1mm K s T s +s t K图1-12 系统原理图1.2 系统的方框结构图与开环传递函数由上一节得到的原理图可以转换成系统方框图,如图1-13图1-13 系统方框图从系统方框图可以看出,本系统为闭环双反响系统,其中内反响为测速负反响,外反响为单位负反响。
运用有关定理,求得开环传递函数如下:()()1233()11mo mm c K K KK K G s s T s Ts KK K K =+++⎡⎤⎣⎦1.3 火炮系统的工作过程自动控制过程分析〔工作原理〕:(1) 随动系统处于平衡状态,此时有θ1=θ2=0,偏差电压u=0,ua=0,执行电机不动,火炮也不动。
此平衡状态下对应的偏差等于零。
(2) 假如自整角机发送机转子顺时针转过一角度,例如10度,此时角差=10度,u与ua不等于零,ua极性决定电机〔接收机〕旋转方向。
电机将带动火炮转过10度,与电机轴相固联的接收机转子也转过10度,使角差再次等于零,如此u=ua=0,如此火返航炮停止转动。
(3) 假如自整角机发送机转子连续转动,如此火炮也跟着发送机转子按一样方向连续转动。
这样就可实现火炮的自动跟踪。
此时角差、u、ua均不等于零。
1.4 性能指标确实定火炮系统应具有良好的快速性与稳定性。
稳定性决定能否实现跟踪目标,快速性决定跟踪目标的反响能力。
性能指标确定如下:≤0.8秒;〔1〕调节时间:ts〔2〕超调量:σ%≤30%;e≤〔3〕速度稳态误差:0.01ssv二控制系统的方案和主要元部件的选择2.1 系统的方案火炮系统的工作过程进展分析,建立数学模型,得到理论的传递函数。
.在投入实际生产之前,还需要考虑各方面的因素,如元部件的选择,系统的稳定性分析,动态性能的要求,与各项指标确实定。
2.2 元部件的选择〔1〕电位器的选择需要选择一对电位器,一个作为输入,一个作为反响,由于火炮的转动方位要求全面,因此,电位器的最大偏转角度应接近于180度,才能有广K=30V/360阔的视野。
电位器的传递系数应足够大,才能保证角度的转换精度。
1度=0.083〔2〕运算放大器的选择运算放大器的放大倍数需配合电位器的输入的极值,防止非线性失真,导致跟踪不准确。
并且要求运放的温漂低。
运放I的参数用于调节开环放大倍数,运放II的K设定为1,时间常数T=RC=0.04秒。
〔3〕 功率放大器的选择 功率放大器的直流放大倍数恒定,保证要使功放稳步驱动后级电动机,3K =220/7=31.5。
〔4〕 直流电动机的选择 直流伺服电动机选择适宜的额定电压U=220V,充分考虑带负载能力,选择电动机,使得m T =1,m K =10。
〔5〕测速发电机的选择 与直流电动机配对使用,参数的X 围略大于电动机的配置,留有一定的裕量。
〔6〕有关电阻电容的选择 由于火炮需要一定的控制精度.因此电阻电容的参数准确度要高,并且稳定性好,温漂小。
三 开环增益选择和静态误差计算在选定好系统的根本元件,确定不变的参数后,需要运用控制理论对系统的传递函数进展系统的分析。
代入相关的参数值,得到代数式:3.1 系统无测速反响当测速反响为零时,即c K =0,此时系统的开环传函变为()()1232326.15()(1)(0.041)11m o m m c K K KK K K G s s s s s T s Ts KK K K ==+++++⎡⎤⎣⎦令2655K K *=,可以得到开环根轨迹传递函数为 ()(1)(25)o K G s s s s *=++此时系统包含三个特征根,1230,1,25s s s ==-=-,系统的第二个特征根过于靠近虚轴,当改变开环传函放大倍数时,容易引起系统的不稳定。