机器视觉实验报告3
机器视觉-实验三报告-模板匹配法实现车牌识别
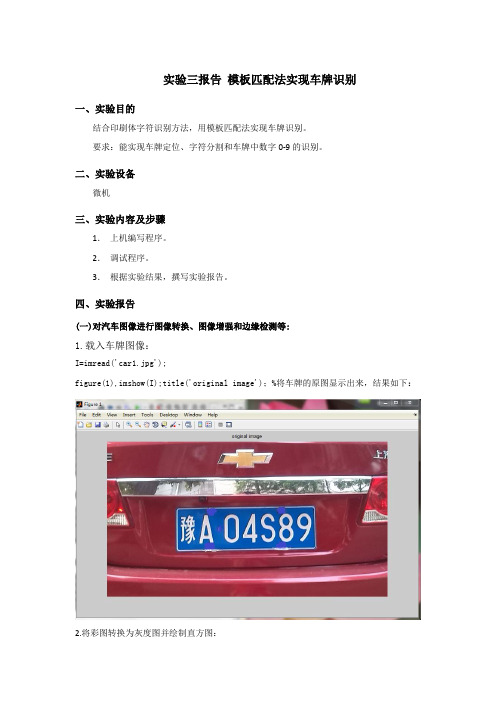
实验三报告模板匹配法实现车牌识别一、实验目的结合印刷体字符识别方法,用模板匹配法实现车牌识别。
要求:能实现车牌定位、字符分割和车牌中数字0-9的识别。
二、实验设备微机三、实验内容及步骤1.上机编写程序。
2.调试程序。
3.根据实验结果,撰写实验报告。
四、实验报告(一)对汽车图像进行图像转换、图像增强和边缘检测等:1.载入车牌图像:I=imread('car1.jpg');figure(1),imshow(I);title('original image');%将车牌的原图显示出来,结果如下:2.将彩图转换为灰度图并绘制直方图:I1=rgb2gray(I);%将彩图转换为灰度图figure(2),subplot(1,2,1),imshow(I1);title('gray image');figure(2),subplot(1,2,2),imhist(I1);title('灰度图直方图');%绘制灰度图的直方图结果如下所示:3. 用roberts算子进行边缘检测:I2=edge(I1,'roberts',0.18,'both');%选择阈值0.18,用roberts算子进行边缘检测figure(3),imshow(I2);title('roberts operator edge detection image');结果如下:4.图像实施腐蚀操作:se=[1;1;1];I3=imerode(I2,se);%对图像实施腐蚀操作,即膨胀的反操作figure(4),imshow(I3);title('corrosion image');5.平滑图像se=strel('rectangle',[25,25]);%构造结构元素以正方形构造一个se I4=imclose(I3,se);%图像聚类、填充图像figure(5),imshow(I4);title('smothing image');结果如下所示:6. 删除二值图像的小对象I5=bwareaopen(I4,2000);%去除聚团灰度值小于2000的部分figure(6),imshow(I5);title('remove the small objects'); %用imshow函数显示滤波后图像结果如下所示:(二)车牌定位[y,x,z]=size(I5);%返回I5各维的尺寸,存储在x,y,z中myI=double(I5);%将I5转换成双精度tic %tic表示计时的开始,toc表示计时的结束Blue_y=zeros(y,1);%产生一个y*1的零阵for i=1:yfor j=1:xif(myI(i,j,1)==1)%如果myI(i,j,1)即myI的图像中坐标为(i,j)的点值为1,即该点为车牌背景颜色蓝色 %则Blue_y(i,1)的值加1Blue_y(i,1)= Blue_y(i,1)+1;%蓝色像素点统计endendend[temp MaxY]=max(Blue_y);%Y方向车牌区域确定%temp为向量yellow_y的元素中的最大值,MaxY为该值的索引PY1=MaxY;while ((Blue_y(PY1,1)>=5)&&(PY1>1))PY1=PY1-1;endPY2=MaxY;while ((Blue_y(PY2,1)>=5)&&(PY2<y))PY2=PY2+1;endIY=I(PY1:PY2,:,:);%行方向车牌区域确定%%%%%% X方向 %%%%%%%%%Blue_x=zeros(1,x);%进一步确定x方向的车牌区域for j=1:xfor i=PY1:PY2if(myI(i,j,1)==1)Blue_x(1,j)= Blue_x(1,j)+1;endendendPX1=1;while ((Blue_x(1,PX1)<3)&&(PX1<x))PX1=PX1+1;endPX2=x;while ((Blue_x(1,PX2)<3)&&(PX2>PX1))PX2=PX2-1;endPX1=PX1-1;%对车牌区域的校正PX2=PX2+1;dw=I(PY1:PY2-8,PX1:PX2,:);t=toc;figure(7),subplot(1,2,1),imshow(IY),title('Line direction areas');%行方向车牌区域确定figure(7),subplot(1,2,2),imshow(dw),title('positioning color images');%定位后的车牌区域如下所示:(三)字符分割与识别1.车牌的进一步处理对分割出的彩色车牌图像进行灰度转换、二值化、均值滤波、腐蚀膨胀以及字符分割以从车牌图像中分离出组成车牌号码的单个字符图像,对分割出来的字符进行预处理(二值化、归一化),然后分析提取,对分割出的字符图像进行识别给出文本形式的车牌号码。
机器视觉实习报告模板

一、实习背景与目的随着人工智能技术的飞速发展,机器视觉技术在各个领域中的应用越来越广泛。
为了深入了解机器视觉技术,提升自身在图像处理、模式识别等方面的实践能力,我选择了机器视觉作为实习方向。
本次实习旨在通过实际操作,掌握机器视觉的基本原理和应用方法,提高自己的编程能力和问题解决能力。
二、实习时间与地点实习时间:2023年X月X日至2023年X月X日实习地点:XX科技有限公司三、实习内容1. 图像预处理实习期间,我首先学习了图像预处理的基本概念和方法。
通过对图像的灰度化、二值化、滤波等操作,提高了图像质量,为后续的图像处理奠定了基础。
2. 图像处理在图像处理方面,我学习了边缘检测、角点检测、纹理分析等算法。
通过实际操作,我掌握了Canny算子、Sobel算子等边缘检测方法,并能够根据实际需求选择合适的算法。
3. 机器学习与深度学习为了进一步提高图像处理能力,我学习了机器学习与深度学习在机器视觉中的应用。
通过使用OpenCV、TensorFlow等工具,我实现了图像分类、目标检测、人脸识别等功能。
4. 实际项目应用在实习过程中,我参与了公司的一项实际项目——基于机器视觉的智能监控系统。
该项目旨在利用机器视觉技术实现实时监控、异常检测等功能。
在项目中,我负责图像预处理、特征提取、目标检测等模块的开发。
四、实习成果1. 知识层面通过实习,我对机器视觉的基本原理和应用方法有了更深入的了解,掌握了图像预处理、图像处理、机器学习与深度学习等知识。
2. 技能层面在实习过程中,我熟练掌握了OpenCV、TensorFlow等工具,提高了自己的编程能力和问题解决能力。
3. 项目经验通过参与实际项目,我积累了丰富的项目经验,能够独立完成机器视觉相关模块的开发。
五、实习心得与体会1. 理论与实践相结合在实习过程中,我深刻体会到理论与实践相结合的重要性。
只有将所学知识应用于实际项目中,才能真正掌握机器视觉技术。
2. 团队合作与沟通在项目开发过程中,我学会了与团队成员有效沟通,共同解决问题。
机器视觉实习报告总结

一、实习背景随着科技的飞速发展,机器视觉技术在各个领域得到了广泛应用。
为了更好地了解这一前沿技术,提高自己的实践能力,我于近期参加了一次为期一个月的机器视觉实习。
此次实习使我受益匪浅,不仅加深了对机器视觉理论知识的理解,还提升了实际操作技能。
二、实习内容1. 理论学习实习期间,我们首先进行了机器视觉理论的学习。
主要内容包括:(1)图像基础知识:像素、通道、坐标系等基本概念。
(2)图像预处理:图像增强、图像恢复、图像分割等预处理方法。
(3)OpenCV库的使用:完成图像操作、人脸识别、Haar特征及其级联分类器等。
(4)神经网络与卷积神经网络:概念、数学原理及其在图像处理中的应用。
(5)TensorFlow API的使用:搭建神经网络,实现图像识别、目标检测等功能。
2. 实践操作在理论学习的基础上,我们进行了实践操作。
具体内容包括:(1)图像预处理:使用OpenCV库对图像进行增强、恢复和分割。
(2)人脸识别:通过Haar特征及其级联分类器实现人脸识别。
(3)神经网络训练:使用TensorFlow API搭建神经网络,进行图像识别、目标检测等任务。
(4)开发环境迁移:将开发环境转移到Linux系统上,熟悉Ubuntu操作。
三、实习收获1. 理论知识方面通过实习,我对机器视觉的理论知识有了更加深入的理解。
例如,了解了图像处理的基本原理,掌握了OpenCV库的使用方法,学习了神经网络与卷积神经网络的原理及其在图像处理中的应用。
2. 实践操作方面在实践操作过程中,我学会了使用OpenCV库进行图像处理,实现了人脸识别等功能。
同时,通过TensorFlow API搭建神经网络,提升了图像识别、目标检测等任务的实现能力。
3. 思维方法方面实习过程中,我学会了如何将理论知识应用于实际操作,培养了独立思考和解决问题的能力。
此外,通过与团队成员的沟通交流,提升了团队协作能力。
4. 系统操作方面将开发环境迁移到Linux系统上,使我熟悉了Ubuntu操作,为以后的工作打下了基础。
机器视觉认知实习报告

一、实习背景随着人工智能技术的飞速发展,机器视觉作为人工智能的一个重要分支,已经在各个领域得到了广泛应用。
为了深入了解机器视觉技术,提高自己的实践能力,我参加了为期一个月的机器视觉认知实习。
本次实习旨在通过理论学习和实践操作,全面掌握机器视觉的基本原理、应用领域以及开发流程。
二、实习内容1. 理论学习(1)图像处理基础实习初期,我学习了图像处理的基本概念,包括像素、分辨率、灰度图、彩色图等。
通过对图像的预处理、增强、恢复等操作,我掌握了图像处理的基本方法,如滤波、锐化、阈值分割等。
(2)机器视觉原理在了解了图像处理的基础上,我进一步学习了机器视觉的基本原理,包括边缘检测、特征提取、图像识别等。
通过学习,我对图像识别的流程有了清晰的认识,并了解了常用的机器视觉算法,如Sobel算子、Canny算子、Hough变换等。
(3)深度学习与神经网络为了更好地理解机器视觉,我学习了深度学习与神经网络的基本概念。
通过对卷积神经网络(CNN)的学习,我了解了神经网络在图像识别中的应用,并掌握了TensorFlow等深度学习框架的使用。
2. 实践操作(1)图像预处理在实习过程中,我使用OpenCV等工具对图像进行预处理,包括灰度化、滤波、锐化等操作。
通过实践,我掌握了图像预处理的基本技巧,提高了图像质量。
(2)图像识别我利用机器视觉算法对图像进行识别,包括边缘检测、特征提取、图像识别等。
通过实践,我掌握了常用的图像识别算法,并提高了图像识别的准确率。
(3)深度学习应用在实习过程中,我使用TensorFlow等深度学习框架搭建了简单的神经网络模型,并应用于图像识别任务。
通过实践,我了解了深度学习在图像识别中的应用,并提高了自己的编程能力。
三、实习收获通过本次实习,我收获颇丰:1. 理论知识:我对机器视觉的基本原理、应用领域以及开发流程有了全面的认识,为今后的学习和工作打下了坚实的基础。
2. 实践能力:通过实际操作,我掌握了图像处理、图像识别、深度学习等机器视觉技术的应用,提高了自己的实践能力。
学习机器视觉实习报告

一、实习背景随着人工智能技术的飞速发展,机器视觉作为人工智能的一个重要分支,其在工业自动化、安防监控、医疗诊断等多个领域的应用日益广泛。
为了更好地了解和掌握机器视觉技术,提高自身的实践能力和创新能力,我于2023年7月至9月在XX科技有限公司进行了为期三个月的机器视觉实习。
二、实习单位简介XX科技有限公司是一家专注于机器视觉研发和应用的高新技术企业,拥有雄厚的研发实力和丰富的项目经验。
公司主要业务包括机器视觉系统集成、视觉检测设备研发、视觉算法开发等。
在实习期间,我有幸参与了多个实际项目,与团队成员共同完成了从需求分析、方案设计到系统调试的全过程。
三、实习内容1. 理论学习实习期间,我系统学习了机器视觉的相关理论知识,包括图像处理、特征提取、目标检测、跟踪、识别等。
通过阅读专业书籍、参加线上课程和与导师讨论,我对机器视觉有了更深入的理解。
2. 项目实践(1)工业产品缺陷检测项目该项目旨在利用机器视觉技术对工业产品进行缺陷检测,提高生产效率和产品质量。
在项目中,我负责编写检测算法,实现产品缺陷的自动识别和分类。
通过实验验证,该算法具有较高的准确率和实时性。
(2)人脸识别项目该项目旨在利用人脸识别技术实现人员身份验证。
在项目中,我参与了人脸检测、人脸特征提取和匹配算法的研究与实现。
通过实验验证,该系统能够准确识别和验证人员身份。
3. 团队协作与沟通在实习过程中,我与团队成员保持密切沟通,共同解决问题。
通过参与项目讨论、撰写技术文档和汇报工作进展,我提高了自己的团队协作和沟通能力。
四、实习收获1. 技术能力提升通过实习,我掌握了机器视觉的基本原理和方法,熟悉了相关软件和工具的使用,提高了自己的编程能力和算法设计能力。
2. 实践经验积累在实习过程中,我参与了多个实际项目,积累了丰富的实践经验,为今后的工作打下了坚实的基础。
3. 团队协作与沟通能力通过与团队成员的密切合作,我学会了如何与他人沟通、协调和解决问题,提高了自己的团队协作和沟通能力。
视觉机械互动实验报告(3篇)
第1篇一、实验目的本次实验旨在通过视觉机械互动系统,探究计算机视觉技术在机械运动控制中的应用,实现对机械运动的实时检测、跟踪与控制。
通过实验,掌握视觉机械互动系统的基本原理、搭建方法及实验操作步骤,加深对计算机视觉与机械运动控制相互融合的理解。
二、实验原理视觉机械互动系统主要包括计算机视觉系统、机械运动控制系统和交互界面三部分。
计算机视觉系统负责捕捉机械运动过程中的图像信息,通过图像处理算法提取关键特征;机械运动控制系统根据提取的特征实现对机械运动的实时控制;交互界面则用于用户与系统之间的信息交互。
实验中,计算机视觉系统采用基于特征提取的方法,如边缘检测、轮廓提取等,对机械运动过程中的图像进行特征提取。
机械运动控制系统采用PID控制算法,根据提取的特征对机械运动进行实时控制。
交互界面采用图形界面,实现用户对机械运动的实时监控和参数设置。
三、实验设备与工具1. 实验设备:计算机、摄像头、机械臂、实验台等;2. 实验工具:摄像头支架、导线、连接器、编程软件等。
四、实验步骤及方法1. 系统搭建:将摄像头固定在实验台上,调整摄像头与机械臂的相对位置,确保摄像头能够清晰捕捉到机械臂的运动过程。
将摄像头连接到计算机,安装相应的图像采集和处理软件。
2. 图像采集:启动图像采集软件,实时捕捉机械臂的运动过程。
调整摄像头参数,如分辨率、帧率等,确保图像质量。
3. 图像处理:对采集到的图像进行预处理,如去噪、滤波等,提高图像质量。
然后采用边缘检测、轮廓提取等方法提取机械臂的关键特征。
4. 特征匹配:将提取的特征与预设的模型进行匹配,判断机械臂的运动状态。
5. 机械运动控制:根据匹配结果,采用PID控制算法对机械臂进行实时控制,实现精确运动。
6. 交互界面设计:设计图形界面,实现用户对机械运动的实时监控和参数设置。
五、实验结果与分析1. 实验结果:通过实验,成功搭建了视觉机械互动系统,实现了对机械运动的实时检测、跟踪与控制。
机器视觉实验报告
机器视觉实验报告
一、实验目的
本实验旨在探究机器视觉在图像识别和分析方面的应用,通过实际操作和数据分析,验证机器视觉技术的准确性和可行性。
二、实验装置与方法
1. 实验装置:使用具备机器视觉功能的摄像头和计算机软件。
2. 实验方法:
a. 首先,搜集一定数量的图像数据作为实验样本。
b. 接着,利用机器视觉软件对图像数据进行处理和分析。
c. 最后,对机器视觉技术的准确性和稳定性进行评估。
三、实验结果分析
通过实验数据的分析和比对,我们得出以下结论:
1. 机器视觉在图像识别方面具有较高的准确率,能够准确辨识不同物体和场景。
2. 机器视觉在图像分析方面具有较强的处理能力,能够提取图像特征和进行数据分析。
3. 机器视觉技术的稳定性较高,能够在复杂环境下正常工作并保持较高的准确性。
四、实验结论与展望
通过本次实验,我们验证了机器视觉技术在图像识别和分析方面的有效性和可靠性。
未来,随着技术的不断进步和应用领域的拓展,机器视觉将会在更多领域展示出其强大的功能和潜力,为人类生活和工作带来更多便利和效益。
以上为机器视觉实验报告的内容,希望能够对您有所帮助。
视觉机器应用实验报告(3篇)

第1篇一、实验目的本次实验旨在通过实际操作,了解并掌握视觉机器的基本原理和应用,提高对视觉机器处理技术的认识。
实验内容包括边缘检测、显著性检测、特征点检测和直线检测等,通过对比不同算法的优缺点,分析其在实际图像处理中的应用和局限性。
二、实验内容与步骤1. 边缘检测(1)选择图像数据:选取一张包含明显边缘结构的图像作为实验对象。
(2)Sobel边缘检测:使用Sobel算子对图像进行边缘检测,记录结果。
(3)Canny边缘检测:使用Canny算子对图像进行边缘检测,记录结果。
(4)比较两种方法的边缘检测效果,分析其差异。
2. 显著性检测(1)选择图像数据:选取一张包含不同显著性区域的图像作为实验对象。
(2)HC显著性检测:使用Python和OpenCV实现HC显著性检测算法,调整参数,比较检测效果。
(3)基于最小方向对比度显著性检测:使用Python和OpenCV实现基于最小方向对比度显著性检测算法,调整参数,比较检测效果。
(4)基于最稳定区域显著性检测:使用Python和OpenCV实现基于最稳定区域显著性检测算法,调整参数,比较检测效果。
3. 特征点检测(1)选择图像数据:选取一张包含明显角点的图像作为实验对象。
(2)Harris角点检测:使用Python和OpenCV实现Harris角点检测算法,调整参数,比较检测效果。
(3)分析角点检测结果与实际图像特征之间的关系。
4. 直线检测(1)选择图像数据:选取一张包含直线的图像作为实验对象。
(2)哈夫变换直线检测:使用Python和OpenCV实现哈夫变换直线检测算法,调整参数,比较检测效果。
(3)对图像进行预处理(如边缘检测)以提高直线检测效果。
(4)分析哈夫变换在实际场景中的应用和局限性。
三、实验结果与分析1. 边缘检测通过对比Sobel算子和Canny算子的边缘检测结果,发现Canny算子具有更好的检测效果,能够有效抑制噪声,同时保留边缘信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验五图像的分割与边缘提取
一、实验内容
1.图像阂值分割
实验代码:
clear all, close all;
I=imread('flower.tif');
figure(1),imshow(I)
figure(2); imhist(I)
T=120/255;
Ibw1=im2bw(I,T);
figure(3);
subplot(1,2,1), imshow(Ibw1);
T=graythresh(I);
L=uint8(T*255)
Ibw2=im2bw(I,T);
subplot(1,2,2), imshow(Ibw2);
help im2bw;
help graythresh;
运行结果:
实验代码:
clear all, close all;
I=imread('flower.tif');
figure(1),imshow(I)
figure(2); imhist(I)
T=240/255;
Ibw1=im2bw(I,T);
figure(3);
subplot(1,2,1), imshow(Ibw1); T=graythresh(I);
L=uint8(T*255)
Ibw2=im2bw(I,T);
subplot(1,2,2), imshow(Ibw2); help im2bw;
help graythresh;
运行结果:
2.边缘检测
实验代码:
clear all, close all;
I=imread('flower.tif');
BW1=edge(I,'sobel');
BW2=edge(I,'canny');
BW3=edge(I,'prewitt');
BW4=edge(I,'roberts');
BWS=edge(I,'log');
figure(1), imshow(I), title('Original Image'); figure(2), imshow(BW1), title('sobel');
figure(3), imshow(BW2), title('canny');
figure(4), imshow(BW3), title('prewitt');
figure(5), imshow(BW4), title('roberts');
figure(6), imshow(BWS), title('log');
%在完成上述试验后,查看函数edge()使用说明。
help edge
运行结果:
3.灰度阂值分割:
实验代码:
I=imread('649.jpg'); I=rgb2gray(I);
I2=im2bw(I); figure,imshow(I2);
I2=im2bw(I,140/255); figure,imshow(I2)
运行结果:
4.区域分割法
实验代码:
I=imread('649.jpg');
I=rgb2gray(I);
imshow(I)
c=[222 272 300 270 221 194]; r=[21 21 75 121 121 75];
BW=roipoly(I,c,r);
figure,imshow(BW)
H=fspecial('unsharp');
J1=roifilt2(H,I,BW);
figure,imshow(J1)
J2=roifill(I,c,r);
figure,imshow(J2)
运行结果:
5. 分水岭分割法
实验代码:
f=imread('649.jpg'); imshow(f);
g=im2bw(f, graythresh(f)); figure,imshow(g);
gc=~g;
D=bwdist(gc);
L=watershed(-D);
w=L==0;
g2=g&~w;
figure,imshow(g2)
运行结果:
实验六图像形态学运算1.
实验代码:
I=imread('649.jpg');
level = graythresh(I);
bw = im2bw(I,level);
SE = strel('square',3);
BW1 = imdilate(bw,SE);
SE1 = strel('arbitrary',eye(5));
BW2 = imerode(bw,SE1);
BW3 = bwmorph(bw, 'open');
BW4 = bwmorph(bw, 'close');
imshow(I);
figure,imshow(bw);
figure,imshow(BW1);
figure,imshow(BW2);
figure,imshow(BW3);
figure,imshow(BW4);
运行结果:。