实验 交流伺服电动机实验1——实验报告样板
伺服电机开环实验报告
实验一伺服电机开环控制1. 实验简介此程序实现的是控制交流伺服电机转速的功能。
通过此程序可以掌握如下几点:A.如何控制电机定子磁场的角度和幅度(通过SVPWM模块)。
控制伺服电机,程序的功能就是如何去产生和控制电机定子磁场的角度和幅度,能输出任意角度和幅度的定子磁场,就有了控制电机的基础。
B.如何通过编码器得到电机的转子位置。
电机编码器输出的是ABZ三相信号,DSP内部自带有编码器信号接口模块QEP模块。
通过配置此模块,可以将外部的AB信号进行计数,当前的计数值除以一圈的脉冲数就是转子当前的角度。
得到转子当前的角度才能去控制电机定子磁场的角度。
C.如何缓冲外部输入信号。
用户设置的输出,可能一下从0到一个很大的值,这样电机一下就得到一个很高的电压,而此时电机并没有转起来,没有反电势,此时电流就会很大,达不到软启动的效果。
次程序通过一个斜坡函数”Rmp_cntl”模块,将输入信号进行缓冲,达到软启动的效果。
D.如何通过测得的转子位置运算成当前的速度。
程序中通过一个固定的时间间隔1ms,测两次转子的位置,两次转子位置的差除以时间,就能得到当前的速度。
现在简单介绍下伺服电机运行的原理,电机产生输出力是转子磁场和定子磁场作用的结果。
要让电机旋转,就要让定子磁场在空间上超前或滞后转子磁场90°,这样输出的力都是用来做机械功率。
这个方向的力就是QS。
如果超前的不是90°,而是其他角度,这个角度可以分解成一个垂直转子磁场,和平行转子磁场的力。
垂直的产生力的输出,平行的就能强化或弱化转子磁场。
一般情况是只输出垂直转子磁场的力,这样发热最小,效率最高。
2. 程序框图此程序实现的是交流伺服电机的开环调速。
通过显示板设定输出占空比,占空比信号输入给”Rmp_cntl”模块(此模块产生斜坡函数,输出需要再一定时间内线性加大或减小逐步达到输入,这样可以消除输入突变产生的抖动),模块的输出再作为”Ipark”模块Qs的输入。
交流伺服驱动器验证试验报告
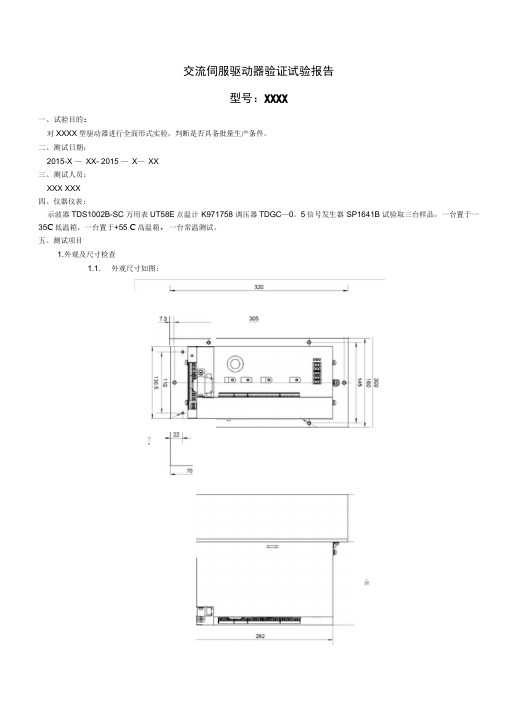
1.1. 外观尺寸如图: 交流伺服驱动器验证试验报告
型号:XXXX
一、试验目的:
对XXXX型驱动器进行全面形式实验,判断是否具备批量生产条件。
二、测试日期:
2015-X —XX- 2015 —X—XX
三、测试人员:
XXX XXX
四、仪器仪表:
示波器TDS1002B-SC 万用表UT58E点温计K971758 调压器TDGC—0。
5信号发生器SP1641B 试验取三台样品,一台置于一35C低温箱,一台置于+55 C高温箱,一台常温测试。
五、测试项目
1.外观及尺寸检查
O
一
«!=
-50
(驱动器外形尺寸图)测试结果记录在图上
结论:合格
1.2.铭牌检查:
铭牌应包括以下内容:
型号:XXXX
和******** 'k *
生产批次: 生产厂商:XXX公司
结论:合格
2.常温测试:
温度范围—40 C〜+60C 循环次数:12次(不通电)温度变化率:5C /min
保温时间:40min 试验结果:合格
6.电磁兼容
测试结果:合格
六、整机测试结论
合格,可投入量产
附表:速度环线性:。
步进电动机-交流伺服电动机实验

实验一步进电动机步进电动机又称脉冲电机,是数字控制系统中的一种重要的执行元件,它是将脉冲信号变换成转角或转速的执行电动机,其角位移量与输入电脉冲数成正比。
在负载能力范围内,这些关系将不受电源电压、负载、环境、温度等因素的影响,还可在很宽的范围内实现调速、快速启动、制动和反转。
随着数字技术和电子计算机的发展,使步进电动机的控制更加简便、灵活和智能化。
现已广泛用于各种数控机床、绘图机、自动化仪表、计算及外设,数、模变换等数学控制系统中作为元件。
一、使用说明D54步进电动机实验装置由步进电机智能控制箱和实验装置两部分构成。
(一)步进电机智能控制箱本控制箱用以控制步进电机的各种运行方式,它的控制功能是由单片机来实现的。
通过键盘的操作和不同的显示方式来确定步进电机的运行情况。
本控制箱可适用于三相、四相、五相步进电动机各种运行方式的控制。
因实验装置又提供三相反应式步进电机,故控制箱只提供三相步进电动机的驱动电源,面板上也只装有三相步进电动机的绕组接口。
1、面板示意图(见实验台)2、技术指标功能:能实现单步运行、连续运行和预置数运行;能实现单拍、双拍及电机的可逆运行。
电脉冲频率:50Hz ~ 1KHz工作条件:供电电源 AC220V±10%,50Hz环境温度 -5℃~40℃相对湿度≥80%重量:6Kg尺寸:390×200×230mm33、使用说明(1)开启电源开关,面板上的三位数字频率计将显示“000”;由六位LED 数码管组成的步进电机运行状态显示器自动进入“9999→8888→7777→6666→5555→4444→3333→2222→1111→0000”动态自检过称,而后停显在系统的初态“╣.3”。
(2)控制键盘功能说明设置键:手动单步运方式和连续运行方式的选择。
拍数键:单三拍、双三拍、三相六拍等运行方式的选择。
相数键:电机相数(三相、四相、五相)的选择。
转向键:电机正、反转选择。
实验四交流伺服电动机实验
实验四交流伺服电动机实验伺服电动机在自动控制系统中作为执行元件又称为执行电动机,它把输入的控制电压信号变为输出的机械转矩或角速度。
它的运行状态由控制信号控制,加上控制信号它应当立即旋转,去掉控制电压它应当立即停转,转速高低与控制信号成正比。
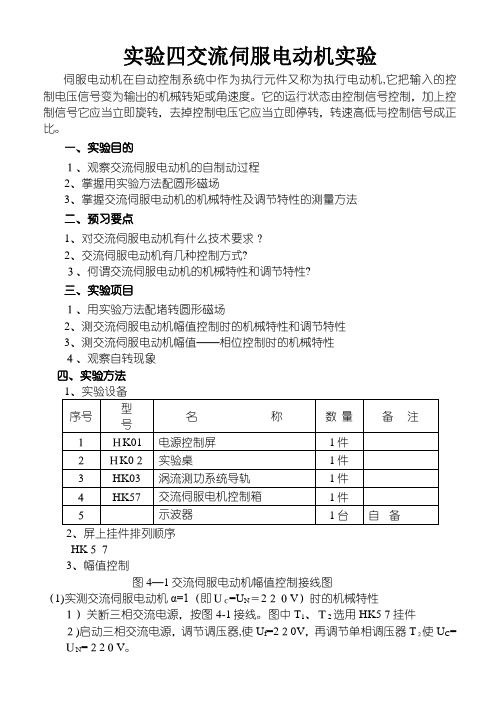
一、实验目的1、观察交流伺服电动机的自制动过程2、掌握用实验方法配圆形磁场3、掌握交流伺服电动机的机械特性及调节特性的测量方法二、预习要点1、对交流伺服电动机有什么技术要求?2、交流伺服电动机有几种控制方式?3、何谓交流伺服电动机的机械特性和调节特性?三、实验项目1、用实验方法配堵转圆形磁场2、测交流伺服电动机幅值控制时的机械特性和调节特性3、测交流伺服电动机幅值——相位控制时的机械特性4、观察自转现象四、实验方法2、屏上挂件排列顺序HK573、幅值控制图4—1交流伺服电动机幅值控制接线图=U N=220V)时的机械特性(1)实测交流伺服电动机α=1(即UC1)关断三相交流电源,按图4-1接线。
图中T1、T2选用HK57挂件2)启动三相交流电源,调节调压器,使U f=220V,再调节单相调压器T2使U C=UN=220V。
3)调节涡流测功机,将力矩T及电机转速记录于表4—1中。
(2)实测交流伺服电动机α=0。
75(即U CN=165V)时的机械特性1)保持U f=220V不变,调节单相调压器T2使UC=0。
75U N=165V。
2)重复上述步骤,将所测数据记录于表4-2中。
(3)实测交流伺服电动机的调节特性1)调节三相调压器使U f=220V,电机空载(涡流测功机不加载)。
逐次调节单相调压器T2。
使控制电压U C从220V逐次减小直到0V。
4、幅值——相位控制(1)用实验方法使电机堵转时的旋转磁场为圆形磁场1)关断三相交流电源,按图4—2接线。
图中T1、T2、C选用HK57挂件。
电压表、电流表、选用控制屏上对应仪表。
R1、R2选用屏上两个900Ω各自并联,用万用表调定在5Ω阻值。
交流伺服电机实验报告
一、实验目的1. 了解交流伺服电机的结构、工作原理和特点。
2. 掌握交流伺服电机的驱动方法及控制策略。
3. 通过实验验证交流伺服电机的性能,为实际应用提供参考。
二、实验内容1. 交流伺服电机的结构分析2. 交流伺服电机的工作原理3. 交流伺服电机的驱动方法4. 交流伺服电机的控制策略5. 交流伺服电机的性能测试三、实验设备及仪器1. 交流伺服电机实验台2. 交流伺服电机驱动器3. 交流伺服电机控制器4. 功率分析仪5. 数据采集卡6. 计算机四、实验步骤1. 交流伺服电机的结构分析(1)观察交流伺服电机的结构,了解其主要组成部分,如定子、转子、端盖、轴承等。
(2)分析各部分的功能及相互关系。
2. 交流伺服电机的工作原理(1)观察交流伺服电机的工作过程,了解其电磁感应原理。
(2)分析交流伺服电机的启动、运行和停止过程。
3. 交流伺服电机的驱动方法(1)学习交流伺服电机的驱动电路,了解其工作原理。
(2)分析驱动电路中的主要元件及其作用。
4. 交流伺服电机的控制策略(1)学习交流伺服电机的控制方法,了解其闭环控制原理。
(2)分析控制策略中的主要参数及其调整方法。
5. 交流伺服电机的性能测试(1)连接实验设备,进行实验前的准备工作。
(2)启动交流伺服电机,观察其运行状态,记录相关数据。
(3)分析实验数据,验证交流伺服电机的性能。
五、实验结果与分析1. 交流伺服电机的结构分析通过观察实验台上的交流伺服电机,我们可以看到其主要由定子、转子、端盖、轴承等部分组成。
定子由线圈绕制而成,转子由永磁体构成。
当交流电源通过定子线圈时,产生旋转磁场,驱动转子旋转。
2. 交流伺服电机的工作原理实验过程中,我们发现交流伺服电机在启动、运行和停止过程中,其转速、转矩和功率等参数均与输入的交流电源频率、电压和相位角有关。
通过调整这些参数,可以实现交流伺服电机的精确控制。
3. 交流伺服电机的驱动方法实验中,我们学习了交流伺服电机的驱动电路,了解到其主要由逆变器、滤波器、电机和控制器等部分组成。
控制电机实验报告

1.交流伺服电动机幅值—相位控制时的机械特性(1)α=1时
=0.75
(2)α
3.实验数据的分析及实验过程中发生的现象
由机械特性曲线可以看出,随着T的增大,n有减小的趋势。
由调节特性曲线可以看出当T=0时,α越大,电机转速越大。
U1=127V调节调压器使Uc=220V,再将Uc开路,电机没有“自转”现象。
U1=127V调节调压器使Uc=220V,再将Uc调节到0V,电机没有“自转”现象。
思考:
1.转子电阻增大到使临界转差率s_m正>1的程度,这时合成转矩曲线与横轴相交仅有一点,而且在电机运行范围内,合成转矩均为负值,即为制动转矩。
因而当控制电压取消变为单相运行时,电机就立即产生制动转矩,与负载转矩一起促使电机迅速停转,这样就不会产生自转现象。
为了消除自转现象,要求有相当大的转子电阻,以使得临界转差率s_m>1
2.当α=1,Uk=Ukn时,气隙中合成磁场是一个圆形旋转磁场。
由调节特性曲线中α=1,T=0时,可以得出理想空载转速n0。
交流伺服电动机实验报告
交流伺服电动机实验报告交流伺服电动机实验报告一、引言交流伺服电动机是一种广泛应用于工业自动化领域的电动机。
它具有高精度、高效率和快速响应等优点,在机械控制系统中扮演着重要的角色。
本实验旨在通过对交流伺服电动机的实际应用和性能测试,深入了解其工作原理和特性。
二、实验设备与方法本实验采用了一台常见的交流伺服电动机系统,包括电机、伺服驱动器和控制器。
实验过程中,我们通过改变控制器发送给驱动器的指令,来控制电动机的转速和位置。
同时,利用示波器和测速仪等仪器,对电动机的性能进行测试和分析。
三、实验结果与分析1. 转速控制实验首先,我们进行了转速控制实验。
通过改变控制器发送的转速指令,我们观察到电动机的转速能够准确地跟随指令变化。
实验结果显示,交流伺服电动机具有较高的转速控制精度和稳定性,能够满足工业自动化系统对转速精度的要求。
2. 位置控制实验接下来,我们进行了位置控制实验。
通过改变控制器发送的位置指令,我们观察到电动机能够准确地移动到指定位置。
实验结果显示,交流伺服电动机具有较高的位置控制精度和响应速度,能够满足工业自动化系统对位置控制的要求。
3. 转矩控制实验为了进一步了解交流伺服电动机的性能,我们进行了转矩控制实验。
通过改变控制器发送的转矩指令,我们观察到电动机能够在不同负载下输出相应的转矩。
实验结果显示,交流伺服电动机具有较高的转矩输出能力和稳定性,能够适应不同负载的需求。
四、实验结论通过本次实验,我们对交流伺服电动机的工作原理和性能有了更深入的了解。
实验结果表明,交流伺服电动机具有高精度、高效率和快速响应等优点,适用于工业自动化系统中对转速、位置和转矩等要求较高的场景。
五、实验总结本实验通过对交流伺服电动机的实际应用和性能测试,深入了解了其工作原理和特性。
同时,我们还学习到了如何通过控制器发送指令来控制电动机的转速、位置和转矩,并通过仪器测试和分析来评估电动机的性能。
这些知识和技能对于我们今后在工业自动化领域的研究和实践具有重要意义。
实验1 交流伺服电机控制实验
实验一交流伺服电机控制实验一、实验目的和要求1、熟悉三菱伺服驱动器的接线及伺服电机的驱动控制方法;2、熟悉AMPCI数据采集卡的使用方法;3、提升计算机编程能力;4、熟悉计算机键盘按键控制外部设备的方法;5、学习微秒级延时方法;二、实验设备与材料准备1、AMPCI9102数据采集卡及相关配件;2、PC机及外围配件;3、三菱伺服驱动雕铣工作台;4、导线若干;三、实验原理及步骤1、实验基本原理通过VB编程控制AMPCI9102数据采集卡向伺服驱动器输出方向电平和脉冲信号,从而控制伺服电机的转向。
举例:欲让X轴电机正转一个脉冲,我们只要先向X轴电机发一个方向电平,现假定高电平1为反转,那么正转就应该发低电平0;然后发一个脉冲即可实现。
若需电机连续转动,则应在脉冲间安插一个延时,建议50毫秒左右。
AMPCI9102数据采集卡相关命令:1)打开AMPCI设备:函数:void _stdcall AM9102_Open(HANDLE *phPLX9052, WORD nCardNum)功能:打开AMPCI-9102卡入口有效参数:nCardNum = 0,1,2,3...出口返回值: 1 打开设备成功0 打开设备失败2)16BIT开关量输出函数:void _stdcall AM9102_D0(HANDLE hPLX9052, WORD date)功能:输出16BIT数字量入口有效参数:date-输出数值, 取值范围0000-FFFF出口返回值: 无3)16BIT开关量输入:函数:WORD _stdcall AM9102_DI(HANDLE hPLX9052)功能:读入16BIT数字量输入状态入口有效参数:无出口返回值: DI-输出数值范围0000-FFFF4)关闭AMPCI设备:函数:void _stdcall AM9102_Close(HANDLE hPLX9052)功能:关闭某一AMPCI9102卡入口有效参数:无出口返回参数:无2、实验步骤1)读懂AMPCI9102数据采集卡的数字量输入/输出插座各引脚定义NC 40 ⊙⊙ 39 NCNC 38 ⊙⊙ 37 NC 19 37 GND 36 ⊙⊙ 35 GND 18 36 +5V 34 ⊙⊙ 33 +5V 17 35 B07 32 ⊙⊙ 31 B06 16 34 B05 30 ⊙⊙ 29 B04 15 33 B03 28 ⊙⊙ 27 B02 14 32 B01 26 ⊙⊙ 25 B00 13 31 B08 24 ⊙⊙ 23 B09 12 30 B10 22 ⊙⊙ 21 B11 11 29 B12 20 ⊙⊙ 19 B13 10 28 B14 18 ⊙⊙ 17 B15 9 27 AO7 16 ⊙⊙ 15 AO6 8 26 AO5 14 ⊙⊙ 13 AO4 7 25 AO3 12 ⊙⊙ 11 AO2 6 24 AO1 10 ⊙⊙ 9 AO0 5 23 AO8 8 ⊙⊙ 7 AO9 4 22 A10 6 ⊙⊙ 5 A11 3 21 A12 4 ⊙⊙ 3 A13 2 20 A14 2 ⊙□ 1 A15 12)接线5 ——X电机脉冲信号24——X电机方向电平6——Y电机脉冲信号25——Y电机方向电平7——Z电机脉冲信号26——Z电机方向电平3)驱动器设置PA01:,控制模式0000,位置控制PA05:500,表示一转所需要的脉冲数PA13:脉冲输入形式0011,负逻辑,脉冲+符号PA14:方向选择,0或者1PD01:限位、伺服使能、比例、转矩等选择,如设置为0000,即可使得外部信号对这些功能进行控制,如图所示:4)驱动器引脚接线10——脉冲信号35——方向信号20、12——+24V46——地42——急停,平时接低电平43、44——限位,平时低电平15——伺服使能,低电平有效5)编程要点Call AM9102_DO(hPLX9052, intWordOut):输出数字量信号intWordOutmicroSec longDelaymicroSecond:延时longDelaymicroSecond微秒四、实验参考程序_______________________________________________________________________________ X轴正转:Public Sub Xinc()intWordOut = &H0Call AM9102_DO(hPLX9052, intWordOut)intWordOut = &H1Call AM9102_DO(hPLX9052, intWordOut)microSec longDelaymicroSecondEnd SubX轴反转:Public Sub Xdec()intWordOut = &H2Call AM9102_DO(hPLX9052, intWordOut)intWordOut = &H3Call AM9102_DO(hPLX9052, intWordOut)microSec longDelaymicroSecondEnd SubY轴正转:Public Sub Yinc()intWordOut = &H0Call AM9102_DO(hPLX9052, intWordOut)intWordOut = &H4Call AM9102_DO(hPLX9052, intWordOut)microSec longDelaymicroSecondEnd SubY轴反转:Public Sub Ydec()intWordOut = &H8Call AM9102_DO(hPLX9052, intWordOut)intWordOut = &HCCall AM9102_DO(hPLX9052, intWordOut)microSec longDelaymicroSecondEnd SubZ轴正转:Public Sub Zinc()intWordOut = &H0Call AM9102_DO(hPLX9052, intWordOut)intWordOut = &H10Call AM9102_DO(hPLX9052, intWordOut)microSec longDelaymicroSecondEnd SubZ轴反转:Public Sub Zdec()intWordOut = &H20Call AM9102_DO(hPLX9052, intWordOut)intWordOut = &H30Call AM9102_DO(hPLX9052, intWordOut)microSec longDelaymicroSecondEnd Sub_______________________________________________________________________________五、实验思考题1、为什么需要延时?2、测试longDelaymicroSecond取不同的数值,对伺服电机运行的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
交流伺服电机实验
一、实验目的
1.了解交流伺服电机
2.掌握交流伺服电机控制方法
二、实验内容
1.测定交流伺服电机的机械特性
2.测定交流伺服电机的调速特性
3.观察交流伺服电机的“自转”现象
三、实验原理
伺服电机又称执行电机。
其功能是将输入的电压控制信号转换为轴上输出的角位移和角速度,驱动控制对象。
伺服电机可控性好,反应迅速。
是自动控制系统和计算机外围设备中常用的执行元件。
交流伺服电机就是一台两相交流异步电机。
它的定子上装有空间互差90 的两个绕组:励磁绕组和控制绕组。
工作时两个绕组中产生的电流相位差近90º,因此便产生两相旋转磁场。
在旋转磁场的作用下,转子便转动起来。
加在控制绕组上的控制电压反相时(保持励磁电压不变),由于旋转磁场的旋转方向发生变化,使电动机转子反转。
交流伺服电动机的特点:在电动机运行时如果控制电压变为零,电动机立即停转。
四、实验步骤
1.测定交流伺服电机机械特性,并绘制n=f(T)曲线α=1
1)启动主电源,调节三相调压器,使Uc=U N=220V;
2)调节涡流测功机的给定调节,记录力矩和转速。
n=f(T)曲线
2. 测定交流伺服电机机械特性,并绘制n=f(T)曲线 α=0.75
1)启动主电源,调节三相调压器,使Uc=0.75U N =165V ; 2)调节涡流测功机的给定调节,记录力矩和转速。
U1
V1W1N
n=f(T)曲线
3.测定交流伺服电机的调速特性,并绘制n=f(Uc)曲线1)启动主电源,调节三相调压器,使Uc=U N=220V;
2)调节三相调压器,记录控制电压和转速。
n=f(Uc)曲线
4.观察交流伺服电机的“自转”现象
1)启动主电源,调节使Uc=220V, U f=117V,观察电机有没有“自转”现象; 2)调节使Uc=0V, U f=117V,观察电机有没有“自转”现象。
五、思考题
1. 分析步骤4中有无“自转”现象?若有“自转”现象,一般如何消除?若无“自转”现象,其原因是什么?
两种状态下,该交流伺服电机均未见“自转”现象。
因为建立的正、反转旋转磁场分别切割笼型绕组(或杯形壁)并感应出大小相同,相位相反的电动势和电流(或涡流),这些电流分别与各自的磁场作用产生的力矩也大小相等、方向相反,合成力矩为零,伺服电机转子转不起来。
当控制信号消失时,只有励磁绕组通入电流,伺服电机产生的磁场将是脉动磁场,转子很快地停下来。