倒立式盘圆收料机的设计及成卷运动计算
机械毕业设计498大直径圆片下料机设计计算书

=55p
3.链节数
=148.81
4.计算功率
=1.0(平稳载荷)
=0.887
=1(单排链)
5.链节距
取 ,由图11-12选用12A滚子链,查机械设计手册表14.2-2得 =19.05mm
6.确定实际中心距
=638.02
7.验算链速
与原假设相符
图3-2链轮受力简图
8.工作拉力
9.作用在轴上载荷
3.全自动下料机在我国已经开始使用,由于制造业工业现代化程度在不久的将来可能会有一的提高,定的市场。但在近期,它将不可能替代液压下料机。
我所设计的大直径圆片下料机属于剪切机类,主要用于剪裁各种铝板。在各种铝制品、轧钢、汽车、飞机、船舶、拖拉机、桥梁、电器、仪表、锅炉、压力容器等各个工业部门中有广泛应用。下料机种类较多,按其工艺用途和结构类型可以分为:
对于机械传动的下料机一般冲切速度都较高,约为250次/分;其冲切速度是变值,平均冲切速度为:200毫米/秒。液压下料机的冲切速度一般为:大于75毫米/秒。
机械传动的下料机和液压传动的下料机不同点,主要由两种传动的不同的特性所决定的:机械传动是刚性传动,而液压传动确有一定的柔性。
液压下料机的特点是:当冲切头通过刀模作用于被加工物的瞬时,作用油缸内的压力并未达到额定压力,压力将随着接触(切入工作物)的时间增加而增加,直到电磁换向阀接收到信号,换向阀换向,冲切头开始复位;这时油缸内的压力由于受到进入油缸的压力油时间的限制,可能并未达到设定的额定压力值;也就是说,系统压力未达到设计值,冲切就已经完成。
C、平板式下料机:它与龙门式下料机的区别在于横梁直接进行冲切,没有可以移动的冲切头。平板下料机又分为:横梁固定或横梁可前后移动及工作台滑板可前后移动的两大类。
倒立摆控制系统设计报告

控制系统综合设计倒立摆控制系统院(系、部):组长:组员班级:指导教师:2014年1月2日星期四目录摘要----------------------------------------------------------------------------------3 引言----------------------------------------------------------------------------------3一、整体方案设计--------------------------------------------------------------31、需求-----------------------------------------------------------------------------32、目标-----------------------------------------------------------------------------33、概念设计----------------------------------------------------------------------34、整体开发方案设计---------------------------------------------------------35、评估----------------------------------------------------------------------------4二、系统设计--------------------------------------------------------------------4 (一)系统设计-----------------------------------------------------------------41、功能分析----------------------------------------------------------------------42、设计规和约束------------------------------------------------------------63、详细设计----------------------------------------------------------------------7 (二)机械系统设计-----------------------------------------------------------8三、理论分析---------------------------------------------------------------------91、控制系统建模----------------------------------------------------------------92、时域和频域分析------------------------------------------------------------133、设计PID或其他控制器---------------------------------------------------21四、元器件、设备选型--------------------------------------------------------30五、加工制作--------------------------------------------------------------------331、加工图纸---------------------------------------------------------------------382、材料选择----------------------------------------------------------------------383、加工方案----------------------------------------------------------------------38六、安装调试--------------------------------------------------------------------38七、经济性分析-----------------------------------------------------------------39八、结论---------------------------------------------------------------------------391、课程设计总结----------------------------------------------------------------392、感悟和体会-------------------------------------------------------------------393、致-----------------------------------------------------------------------------40九、参考文献----------------------------------------------------------------------40倒立摆控制系统设计摘要:在稳定性控制问题上,倒立摆既具有普遍性又具有典型性。
运行中卷径的计算
运行中卷径的计算运行中卷径作为机械行业中非常重要的参数之一,其计算方法也备受关注。
本文将介绍运行中卷径的概念、计算方法以及对机械行业的重要性。
一、运行中卷径的概念运行中卷径指的是在卷曲物体的运动过程中,其卷曲表面上任意一点到卷心的距离。
其计算方法与卷曲物体的卷曲半径有关。
通常情况下,运行中卷径会比卷曲半径要小,因为在卷曲物体运动时,其表面会因为摩擦力而稍微变形,从而导致卷曲表面的半径变小。
二、运行中卷径的计算方法1. 直径法直径法是一种常用的计算运行中卷径的方法。
其原理是通过测量卷曲物体表面上两个相对的点之间的距离来计算运行中卷径。
具体计算方法如下:(1) 在卷曲物体的表面上选择两个相对的点,分别标记为A和B;(2) 测量点A和点B之间的距离,得到AB的长度;(3) 计算卷曲物体卷曲半径r,r=AB/2sinα,其中α为卷曲物体卷曲角度。
卷曲角度α的计算方法为α=360n/N,其中n为卷曲物体的圈数,N为卷曲物体的缠绕数。
(4) 计算运行中卷径d,d=r-0.5t,其中t为卷曲物体的厚度。
2. 弦长法弦长法也是一种常用的计算运行中卷径的方法。
其原理是通过测量卷曲物体表面上任意两个点之间的距离来计算运行中卷径。
具体计算方法如下:(1) 在卷曲物体的表面上选择任意两个点,分别标记为A和B;(2) 测量点A和点B之间的距离,得到AB的长度;(3) 计算卷曲物体卷曲半径r,r=AB/2sinα,其中α为卷曲物体卷曲角度;(4) 计算运行中卷径d,d=r-0.5t,其中t为卷曲物体的厚度。
三、运行中卷径在机械行业中的重要性运行中卷径在机械行业中具有非常重要的作用。
它是机械传动中的基本参数之一,对于机械传动的稳定性、精度和寿命都有着重要的影响。
具体来说,运行中卷径的大小会影响到机械传动的转速、转矩、功率和效率等参数。
因此,在机械传动设计和制造中,必须对运行中卷径进行精确的计算和控制,以确保机械传动的正常运行。
圆形堆取料机堆料体积计算
圆形堆取料机堆料体积计算圆形料场堆取料机是现在工业的一种大型设备。
这种设备通常是结构复杂,机械程度高,具有液压装置系统和带自动控制。
圆形料场堆取料机的主要的组成部件有九部分:第一部分是回转中柱;第二部分是堆料装置;第三部分是堆料臂仰俯液压系统;第四部分是取料机;第五部分是主梁;第六部分是端梁;第七部分是;料耙;第八部分是料耙液压驱动装置;第九部分是轨道系统。
这九部分是设备的最重要的组成部分,在安装的过程中要格外的重视。
圆形料场堆取料机和常规的条形料场的堆取料机相比具有四大优点:第一个优点是设备的存储物料的能力强;第二个优点是设备的占地面积较小;第三个优点是设备所占场地的利用率较高;第四个优点是设备的维修成本较低。
同时由于设备具有一定的封闭性,不会对环境造成很大的污染,因此在电厂等工业行业中应用非常的广泛。
(1)准备一:安装前要将安装图纸及设备图纸进行详细的阅读,以便熟悉整个安装的概念。
(2)准备工作二:加装前要展开设备基础的土建环评和基础划线工作。
(3)准备三:要详细的清点设备以备出库安装。
圆形料场堆取料机的加装采用至的吊装工具通常情况下就是一台t的履带式的起重机,同时服务设施一台25t的汽车吊协调吊装的加装工作。
关于圆形料场堆取料机的吊装的分析,本文从十个步骤展开分析和描述。
第一个步骤就是展开圆形轨道的铺设。
第二个步骤就是加装设备的中心柱底部和设备的中心立柱。
第三个步骤就是加装设备的主梁和悬臂架。
第四个步骤就是展开设备箱型梁的冲压施工。
第五个步骤就是加装设备中的带式输送机。
第六个步骤就是加装设备中的刮板输送机。
第七个步骤就是加装设备中的料耙装置。
第八个步骤就是加装设备中的液压系统。
第九个步骤就是将设备中的各种传动装置展开相连接。
第十个步骤就是加装设备传动装置中的液力耦合器。
下面展开详尽的分析和阐释。
(1)进行圆形轨道的敷设。
在进行圆形轨道敷设时,施工的中心是中心立柱的技术基础中心点。
安装的标准要求是圆形轨道的安装半径偏差不要超过±3m圆形轨道的顶面的相对理论高度应该是在随意的6m范围内误差不超过±1m敷设完成后的圆形轨道极限误差不应该超出±3m(2)加装设备的中心柱底部和设备的中心立柱。
倒立摆数学模型[整理版]
![倒立摆数学模型[整理版]](https://img.taocdn.com/s3/m/a6438416b42acfc789eb172ded630b1c59ee9bcb.png)
1单级倒立摆的数学模型的建立:小车由电机通过同步带驱动在滑杆上来回运动,保持摆杆平衡。
电机编码器和角编码器向运动卡反馈小车和摆杆位置(线位移和角位移)。
导轨截面成H 型,小车在轨道上可以自由滑动,其在轨道上的有效运行长度为1米。
轨道两端装有电气限位开关,以防止因意外失控而撞坏机构。
图1 单级倒立摆系统数学模型倒立摆系统的模型参数如下[]:M 小车质量 1.096Kg ;m 摆杆质量 0.109Kg b 小车摩擦系数 0.1N/m /sec I 摆杆质量 0.0034kg*m*m l 摆杆转动轴心到杆质心的长度 0.25mT 采样频率 0.005s下面N 和P 为小车与摆杆相互作用力的水平和垂直方向的分量。
分析小车水平方向所受的合力,可得到方程为:N x b F xM --= (1)由摆杆水平方向的受力进行分析可以得到下面等式:()θθθθθsin cos sin 222ml ml xm N l x dtd m N -+=+= (2)把这个等式代入(1)式中,得到系统的第一个运动方程:()F ml ml x b xm M =-+++θθθθsin cos 2 (3)为了推出系统的第二个运动方程,对摆杆垂直方向的合力进行分析,得到下面的方程:()θcos 22l dtd m mg P =-θθθθcos sin 2 ml ml mg P --=- (4)力矩平衡方程如下:θθ I Nl Pl =--cos sin (5)方程中力矩的方向,由于φπθ+=,θφθφsin sin ,cos cos -=-=,故等式前面有负号。
合并这两个方程,约去P 和N ,得到第二个运动方程:()θθθcos sin 2x ml mgl ml I -=++ (6)假设φ与1(单位是弧度)相比很小,即1〈〈φ,则可进行近似处理:0,sin ,1cos 2=⎪⎭⎫⎝⎛-=-=dt d θφθθ用u 代表被控对象的输入力,线性化后两个运动方程如下:()()⎪⎩⎪⎨⎧=-++=-+u ml x b x m M x ml mgl ml I φφφ2 (7)对方程(7)进行拉普拉斯变换,得到:()()⎪⎩⎪⎨⎧=-++=-+)()()()()()()(22222s U s s ml s s bX s s X m M s s mlX s mgl s s ml I φφφ (8)(推到时假设初始条件为0)则, 摆杆角度和小车位移的传递函数为:mgls ml I mls s X s -+=222)()()(φ 将上述参数代入,摆杆角度和小车位移的传递函数为:26705.00102125.002725.0)()(22-=s s s X s φ 摆杆角度和小车加速度之间的传递函数为:()mgls ml I mls A s -+=22)()(φ将上述参数代入,摆杆角度和小车加速度之间的传递函数为:26705.00102125.002725.0)()(22-=s s s A s φ 摆杆角度和小车所受外界作用力的传递函数:22432222()()()()()()ml ss qb I ml M m mgl bmgl F s s s s sq q qq M m I ml m l φ=+++--⎡⎤=++-⎣⎦将上述参数代入,摆杆角度和小车所受外界作用力的传递函数:32()2.35655()0.088316727.9169 2.30942s sF s s s s φ=+-- 以外界作用力作为输入的系统状态空间表达式为:222222222201000()00()()()00010()00()()()x x I ml b m gl I ml x x I M m Mml I M m Mml I M m Mml u mlb mgl M m ml I M m Mml I M m Mml I M m Mml φφφφ⎡⎤⎡⎤⎢⎥⎢⎥⎡⎤⎡⎤-++⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥++++++⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-+⎣⎦⎣⎦⎢⎥⎢⎥++++++⎣⎦⎣⎦1000000100x x x y u φφφ⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥==+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦将上述参数代入,以外界作用力作为输入的系统状态空间表达式为:0100000.08831670.62931700.8831670001000.23565527.82850 2.356551000000100x x x x u x x x y u φφφφφφφ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥==+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦以小车加速度作为输入的系统系统状态空间表达式:'01000000010010330044x x x x u g ll φφφφ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦ '1000000100x x x y u φφφ⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥==+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦ 将上述参数代入,以小车加速度作为输入的系统系统状态空间表达式:0100000001000100029.4031000000100x x x x u x x x y u φφφφφφφ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥==+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦2系统的可控性、可观测性分析对于连续时间系统:Bu AX X+= Du CX y +=系统状态完全可控的条件为:当且仅当向量组B A AB B n 1,...,,-是线性无关的,或n ×n 维矩阵[]B A AB B n 1- 的秩为n 。
可实现圆形料场堆取料机360°回转的设计

可实现圆形料场堆取料机360°回转的设计徐云轩华电曹妃甸重工装备有限公司 唐山 063210摘 要:文中描述了圆形料场堆取料机实现堆料机和取料机回转功能的设计研究,解决了圆形料场堆取料机无法实现360°回转的问题,在堆料机、取料机与中间柱体之间采用回转支承连接的基础上,通过滑环和拖令等回转装置的配合或2个拖令的联合配合实现堆料机和取料机分别实现360°回转,并提供相应配套的安全监测保护装置,完善并提升圆形料场堆取料机设备的使用性能,提高了料场存储能力。
关键词:圆形料场堆取料机;拖令;滑环;360°回转;安全监测保护装置中图分类号:TH24 文献标识码:A 文章编号:1001-0785(2023)14-0035-05Abstract: In this paper, the research related to the rotation design of the stacker and reclaimer in the circular yard is described, which solves the problem that the stacker and reclaimer in the circular yard cannot rotate 360°. The stacker and reclaimer are connected with the middle column through slewing bearings. Through the cooperation of slewing devices such as slip ring and Festoon system or two Festoon systems, the stacker and reclaimer can rotate 360 degrees respectively and safety monitoring and protection devices are provided for the corresponding supporting facilities, which improves and enhances the performance of the stacker and reclaimer in the circular yard and improves the storage capacity of the yard. Keywords:stacker-reclaimer in circular yard;Festoon;slip ring;360° rotation;safety monitoring and protection device0 引言圆形料场堆取料机(以下简称堆取料机)在半封闭料场中实现堆取料工作,避免了粉尘在空气中弥漫造成环境污染和松散物料的浪费。
收卷张力计算
直流调速器卷取张力控制原理卷取张力控制原理卷取机的卷取张力由卷取电动机产生。
电动机力矩为: 式中Km——比例系数,常数∮——磁通量; I枢——电动机电枢电流。
卷取张力T与电动机力矩的关系为:式中 D——带卷直径。
带卷速度为:式中行电——电动机的转速; i——电动机至卷筒的速比。
将式2-2、式2-4代入式2-3得:电动机电枢电势E为:或式中K。
——比例系数,常数;∮——磁通量;n电——电动机转数。
将式2-6代入式2-5则得:其中:欲使詈=常数,若E不变,口亦不变,则张力T与电动机电枢电流k成正比。
换言之,在保持线速度钞不变的条件下,一定的电枢电流珠表示一定的卷取张力T。
张力控制的实质在于,若卷取线速度不变,采用电流调整器使电枢电流保持恒定,就可以保持张力恒定。
怎样才能保持卷取线速度不变呢?由于卷取线速度口与带卷直径和带卷转速的乘积Dn成正比,欲使口不变,随着卷径D的变化,带卷转速必须相应变化。
一般采用电势调整器调节电动机的磁通量①,以改变电动机转速,使卷取线速度保持不变,这就是卷取机的速度调节。
卷取机的速度调节除了补偿卷径变化外,还应包括根据工艺要求,对机组速度进行调整。
一般来说机组速度的调节,可采用改变电压(降压)的方法,从基数咒基往下调;而卷径变小时,调速则采用改变激磁(弱磁)的方法,从基速孢基往上调。
这样就可必最大机组速度'Ornax和最大卷径D。
诅x时的转速为基速挖基。
因此,调激磁的调速范围应保证满足下式:式中 nrtmx、咒基——分别为卷筒的最大转速、基速;D、d——分别为带卷的外径、内径。
综上所述,电枢电流j枢与卷取张力T成比例;磁通量①与卷径D成比例。
在电器上采用电流调节器和电势调节器来实现恒张力控制。
上述电势电流复合张力调节系统,用改变磁通的方法来适应卷径的变化,以保证卷取线速度,从而实现恒张力控制。
卷取机处于弱磁条件下土作,不能充分利用电动机力矩;由于电动机磁通的调速范围往往受到限制,不能满足卷径比的要求,在此情况下不得不增加电动机容量。
圆盘给料机设计
本科生毕业论文(设计)题目: 圆盘给料机设计**: ***学院: 工学院专业: 机械设计制造及其自动化班级: 051学号: **********指导教师: 李立和职称: 高级实验师2009 年4 月28 日安徽科技学院教务处制目录摘要 (1)关键词 (1)1前言 (1)2圆盘计算设计 (2)2.1圆盘给料计算 (2)2.2圆盘的设计 (3)2.3圆盘给料机进料口和出料口设计 (4)3功率的计算及电动机的选型 (4)3.1圆盘所需功率的计算 (4)3.2电动机的选择 (5)4传动装置的设计 (7)4.1传动方案的选择 (7)4.2传动装置各轴的运动和动力参数计算 (8)5.传动系统设计 (10)5.1蜗轮蜗杆减速器的设计 (10)5.2轴的结构设计 (13)5.3轴承选定 (15)5.4轴强度校核 (17)5.5键联接和螺栓联接 (20)5.6皮带轮的传动设计 (22)5.7蜗轮蜗杆简要说明 (27)6电控原理图的组成及绘制 (27)6.1 电控原理及图形 (27)6.2 线路保护环节: (28)致谢 (28)参考文献 (29)圆盘给料机设计机械设计制造及其自动化专业倪鸫鸫指导教师李立和摘要:圆盘给料机是一种常用的运输辅助机械,特别在矿山、碎石场、选矿应用较广。
圆盘给料机的结构主题是绕垂直轴旋转的圆盘。
圆盘中部有一接料仓下口是高度可调的调整套,物料从调整套和圆盘的间隙中散漏出来,并被刮板将物料从圆盘上刮落下来。
本设计在给定的原始数据的基础上,通过分析和计算完成了圆盘给料机的总体设计,传动方案的选择。
在此基础上,根据每小时给料量的要求,进行了圆盘、蜗轮蜗杆减速器、电动机、皮带轮等的设计计算。
整个机型结构简单,动力消耗少,维护方便。
关键词:圆盘给料机刮板调整套垂直轴。
1 前言给料机其实就是所说的喂料机,是由于各个地方的叫法不同,所以产生了不同的名字,而其本质和作用都是一样的。
圆盘给料机是一种传统的料仓排料设备。
旋转倒立摆设计报告
旋转倒立摆摘要:倒立摆的控制是控制理论研究中的一个经典问题,通过旋转式倒立摆控制系统的总体结构和工作原理,硬件系统和软件系统的设计与实现等方面,对系统模型进行动力学分析,建立合适的状态空间方程,通过反馈方法实现倒立控制,通过反复的实验,记录,分析数据,总结出比较稳定可行的控制方法。
本系统采用STC89C52作为主控制芯片,WDJ36-1高精度角位移传感器作为系统状态测试装置,通过ADC0832将采集的模拟电压量转化为数字量,传送给STC89C52进行分析处理,并依此为依据控制电机的运转状态,间接地控制摆杆的运动状态。
通过不断地测量、分析,并调整系统控制的参数,基本达到了题目的要求,并通过此次的练习,进一步熟悉掌握了单片机的应用,对控制系统的了解和兴趣。
关键词:单片机最小系统; WDJ36-1角位移传感器; 旋转倒立摆;状态反馈;稳定性;目录1.系统方案 (4)1.1 微控制器模块 (4)1.2电机模块 (4)1.3电机驱动模块 (4)1.4角度传感器模块 (5)1.5电源模块 (5)1.6显示模块 (5)1.7最终方案 (6)2.主要硬件电路设计 (6)2.1电机驱动电路的设计 (6)2.2角度检测电路的设计: (7)3.软件实现 (7)3.1理论分析 (7)3.2总体流程图 (7)3.3平衡调节流程图 (9)4 .系统理论分析及计算.................. . (10)4.1系统分析 (10)4.2 摆臂摆角的计算.................. . (10)5.系统功能测试: (10)5.1测试方案 (10)5.2测试结果 (10)5.3测试分析及结论 (10)6.结束语 (11)1.系统方案:1.1 微控制器模块方案一:采用可编程逻辑期间CPLD作为控制器。
CPLD可以实现各种复杂的逻辑功能、规模大、密度高、体积小、稳定性高、IO资源丰富、易于进行功能扩展。
采用并行的输入输出方式,提高了系统的处理速度,适合作为大规模控制系统的控制核心。
最新收卷直径计算
收卷直径计算
如有侵权请联系网站删除,仅供学习交流
频收卷系统构成及系统框图
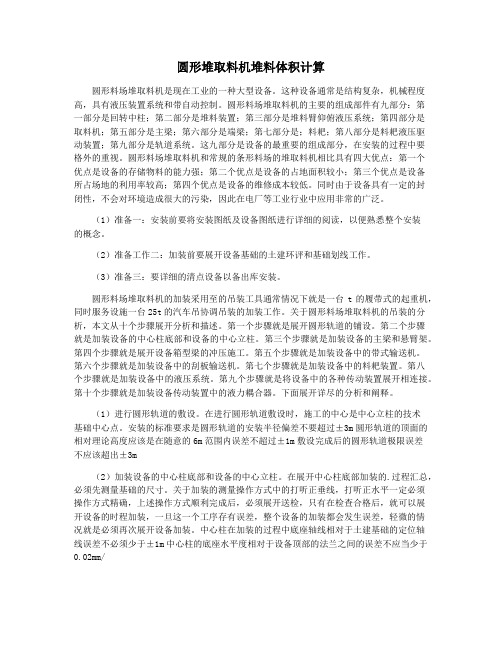
卷径的计算原理:
根据V1=V2来计算收卷的卷径。
因为V1=ω1*R1,
V2=ω2*Rx.因为在相同的时间内由测长辊走过的纱的长度与收卷收到的纱的长度是相等的。
即L1/Δt=L2/Δt ,Δn1*C1=Δn2*C2/i(Δn1---单位时间内牵引电机运行的圈数、Δn2---单位时间内收卷电机运行的圈数、C1---测长辊的周长、C 2---收卷盘头的周长、i---减速比) Δn1*π*D1=Δn2*π*D2/i D2=Δn1*D1*i/Δn2,因为Δn2=ΔP2/P2(ΔP2---收卷编码器产生的脉冲数、P2---收卷编码器的线数). Δn1 =ΔP1/P1取Δn1=1,即测长辊转一圈,由霍尔开关产生一个信号接到PLC.那么D2 =D1*i*P2/ΔP2,这样收卷盘头的卷径就得到了.
系统分类: PLC/PAC | 用户分类: 运动控制 | 来源: 原创
仅供学习交流。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收回,穿进木盘 3,电机 12 驱动丝杠 11 下降,气缸 6 收缩,接料臂 2 张开托起木盘 3,电机 12 驱动丝杠 11 上升指定位置,盘圆 4 从外圆直径 1200mm 开放放线, 以半径 600mm 进行收料。电机 13 通过同步带 8 带动旋 转卷筒 7 旋转,以盘圆的外径在排线电机 14 进行向左 排线,排至内圆直径 600mm 时停止,电机 12 驱动丝杠 11 带动旋转卷筒 7 下移一个盘圆的外径距离,再以内圆 直径 600mm 为起始点,排线电机 14 进行向右排线,排 线至外圆直径(1200- 盘圆 /2)mm 时停止,电机 12 驱 动丝杠 11 带动旋转卷筒 7 下移一个盘圆的外径距离。 这样以盘圆外径 1200mm 与盘圆内径 600mm 范围内反 复排线,收成盘圆高度在 1200mm 时为结束一盘的工作。 在工位 1 收成盘料后,通过排线电机 14 将收成盘料移 至工位 2,将收成的盘料卸掉 , 再通过排线电机 14 移回 工位 1 进行下一盘料的工作,如图 1 所示。
应对金属结构改造质量的问题,为了使得材料更加 的具有可靠性,施工前应随机抽取一定数量的样品进行 检验。在制作和安装门槽预埋件时,应注意以下几点: 当加工主轨道钢板的工作面时,门槽埋入件的表面粗糙 度应为 6μm 左右。制造厂对浇口槽内嵌件进行预装配 和埋设,使设计图纸中各项的偏差和接头错位与相关规 范一致。另外,现场安装门槽预埋件时,实施方案要根 据作业环境来合理的制定有工作经验丰富的人员进行, 对焊接的变形情况进行实时的关注。 2.5 施工止水的对策
中图分类号:TH122
文献标志码:A
文章编号:ቤተ መጻሕፍቲ ባይዱ096-2789(2019)01-0221-02
1 前言 正立式或悬臂式收料,是铜管、铜杆及铝管常用的
一种收料方式。倒立式盘圆收料机主要由接料臂、旋转 套筒、四爪连杆、提升固定套筒、导向定位杆、提升丝杠、 排线等组成。四爪张开连杆机构,实现卷筒上升自动收 料及卸料;导向定位杆,防止提升丝杠随卷筒旋转,保 证上下移动距离的准确值;排线,在成卷中保证每一圈 盘圆落入前一层相邻盘圆的中间。现国内正立式或悬臂 式收料机,设计结构复杂,占地面积大,设备制造成本 高,收卷高度受到限制等。倒立式收料机,利用了地面 以上空间来完成了动作执行。根据这一特性,设计出了 一种新的倒立式收料机。排线伺服电动缸控制每一圈盘 圆的排线而落入前一层相邻盘圆之间,每层收卷的下降, 建立在数学公式上,计算及控制下降和移动的距离。
2019 年第 1 期
· · Development and Innovation | 发展与创新 | 221
倒立式盘圆收料机的设计及成卷运动计算
秦备荒
(广东海亮铜业有限公司,广东 台山 529200)
摘 要:在有色金属制作行业,铜管、铜杆及铝管的收卷机,一般采用正立式或悬臂式收料方式。现提出一种新的收料机— 倒立式盘圆收料机,分解倒立式盘圆收料机的设计理念。每块控制机构都采用了伺服控制,通过伺服控制每块机构的水 平和上下移动,完成盘圆收料,利用图形建模,推导出了数学公式。分析结果表明,倒立式盘圆收料机完全满足使用。 关键词:倒立式;收料机;盘圆;成卷
(4)水平排线机构,驱动整体底座的移动,完成 每收成一圈后的排线。执行两个功能,从盘圆的外径逐 步转向盘圆的内径:1200mm → 600mm。再从盘圆的内 径逐步转向盘圆的外径:600mm → 1200mm。重复这种 排线,实现每层盘圆的收料。
作者简介:秦备荒(1972—),男,工程师,研究方向:三 辊行星轧机 , 拉拔机及铣皮机设备 , 机构自动化设计。
3 倒立式收料机构的设计与动作分解 倒立式收料机,由四部分组成。卸料机构、旋转机构、
上下移动机构和水平排线机构。 (1)卸料机构,解决盘料卸料与木盘自动收起。
设计时考虑了如何将木盘托起是至关点,又兼顾盘料卸 料和木盘的托起。利用气缸活塞杆的伸开和收回来控制 接料臂的收起和打开,解决了盘料卸料和收回接料盘。
图 1 倒立式收料机结构图
接料臂,通过气缸控制,采用连杆机构实施接料臂的收 起和打开。
(2)旋转机构,驱动卸料机构旋转。设计时考虑 了卸料机构要实现上下移动,而又要解决收成不等高的 盘料。四根导向柱,按 90°分配固装,导向柱下固定在 卸料机构上,上有轴承定位,一同固定在不旋转的套筒 上,套筒上下分别固装了轴承。而四辊导向柱又固定在 旋转同步带轮上,电机驱动同步带轮带动了旋转机构的 旋转收料。四根导向柱,起着动力的驱动作用,也起着 上下移动和导向定位的作用。不旋转的套筒是悬空安装 的,避免在高速旋转时晃动,采用了上下轴承的定位安 装,保证了旋转机构与套筒的脱离。
4 倒立式收料机的成卷运动计算 在这里,取盘圆外径为 1200mm 和(下转第 223 页)
2019 年第 1 期
· · Development and Innovation | 发展与创新 | 223
2.3 触电风险的防范对策 第一,在没有开工作业前,做好施工现场临时电源
的设计与组织。第二,现场临时供电设施布置完毕后, 应当进行综合验收处理。在此过程当中,要按操作人员 的要求来进行,以此来完成具有可靠性的安全技术交底 工作。第三,在水闸工程施工现场,要有很好的把控措 施来对其中所涉及到的材料采购以及各项电气设备进行 把关。第四,在用电作业当中,就操作人员而言,一定 要严格依照相关规范以及标准将绝缘防护措施给做好。 应当对其进行必要的监督管理,确保能够在施工过程中, 能够将存在的安全隐患给及时的发现并且予以处理。 2.4 金属结构工程的对策
(3)上下移动机构,承担着每收完一层盘圆的自 动下移和收完一盘料后的自动卸料,通过丝杠来驱动旋 转机构的上下移动。丝杠滑块底座固装在套筒上,丝杠 旋转运动变成套筒直线的上下移动。设计时考虑了套筒 在丝杠的带动下会旋转,避免旋转机构收料的错排料, 中间安装了定位导向套,防止了套筒在丝杠滑块旋转时 的旋转,保证了上下移动机构移动的准确值。