2MSP430_波形输出
MSP430F169单片机及波形发生器设计
MSP430F169单片机及波形发生器设计一、MSP430F169概述MSP430F169是TI公司进入中国市场的MSP430F系列单片机中功能最强的芯片。
具有60K程序存储区、2K的数据存储区、8路快速12 位A/D 转换器、双路12 位D/A转换器,两个通用连续同步/异步通信接口(USART)、I2C 、DMA数据传送模块和48 个I/O 口等外围模块。
结构框图如图12-1所示(见下页)。
MSP430F169单片机为64引脚封装,其中大部分引脚有复用功能,见表12-1。
在波形发生器设计中使用两路DAC通道产生任意波形。
在使用高速时钟和端口时要根据需要将其初始化。
目前,只有MSP430F15/16X系列单片机具有DAC(数模转换)模块,可以将MSP430运算处理的数字量转换为模拟量。
MSP430F169的DAC模块是12位电压输出的数模转换模块(DAC12)。
DAC模块的主要性能指标:1)分辨率:这项指标反映了数字量在最低位上变化1位时输出模拟量的最小变化。
一般用相对值来表示。
对于8位的DAC模块来说,分辨率为最大输出幅度的0.39%,即1/256。
而对于12位DAC模块来说,分辨率可以达到0.024%,即1/4096。
2)偏移误差:它是指输入数字量为0时,输出模拟量对0的偏移值。
3)线性度:是指DAC模块的实际转移特性与理想直线之间的最大偏差。
4)转换速度:即每秒钟可以转换的次数,其倒数为转换时间。
5)参考源电压源:是影响模拟量输出的基准值。
MSP430F169单片机中的D/A功能如下所述:1)MSP430F169的DAC12模块包含两个DAC转换通道:DAC12_0和DAC12_1。
这两个通道在操作上完全平等。
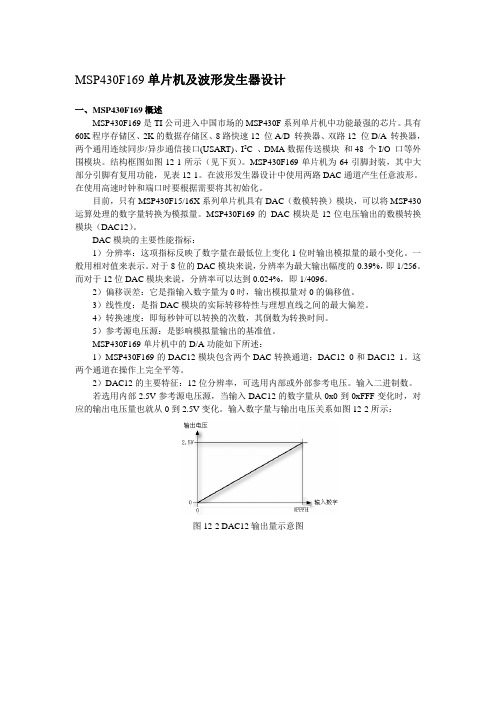
2)DAC12的主要特征:12位分辨率,可选用内部或外部参考电压。
输入二进制数。
若选用内部2.5V参考源电压源,当输入DAC12的数字量从0x0到0xFFF变化时,对应的输出电压量也就从0到2.5V变化。
基于MSP430与AD9833的波形发生器

3.2.
控制模块
方案一:采用 89C51 单片机,89C51 单片机是 8 位单片机,其指令是采用 的被称为“CISC”的复杂指令集,共有 111 条指令。指令复杂且指令周 期长。在功耗方面,89C51 只有两种低功耗方式:待机方式和掉电方 式。正常情况下消耗的电流为 24mA,在掉电状态下,其耗电电流仍 为 3mA;即使在掉电方式下,电源电压可以下降到 2V,但是为了保 存内部 RAM 中的数据,还需要提供约 50uA 的电流。 方案二:采用 MSP430 单片机, MSP430 单片机是 16 位的单片机,采用了 精简指令集(RISC)结构,只有简洁的 27 条指令,大量的指令则是 模拟指令, 众多的寄存器以及片内数据寄存器都可参加多种运算。这 些内核指令均为单周期指令,功能强,运行的速度快。在功耗方面, MSP430 也远优于 89C51,采用了多种低功耗模式。而且 MSP430 输 入输出口比较多,能够满足需求。 基于 MSP430 系列单片机的上述优点,而且引进了 Flash 型程序存储器和
3.6.
稳幅输出模块
这是发挥部分的内容。我们原计划采用峰值检波器获得输出端德电压幅值, 经 A/D 采样后得到输出端当前电压的幅值, 然后通过与预设输出幅值比较就可以 知道输出下降的情况。 并由单片机控制放大器的放大倍数,直至幅值调整到预期 值。但是实际制作时由于时间比较紧迫,这部分并没有实现。但是经过调试,由 于功放级的输出阻抗很小,带负载能力很强,完全能够满足带 100Ω 负载而输出 幅度变化小于 3%的要求。
JTAG 技术,本次设计中选用了 MSP430F2618 作为了主芯片。
3.3.
显示模块
方案一:采用 LED 数码管显示。虽然功率低,控制简单,但却只能显示数字 和一些简单的字符,没有较好的人机界面。 方案二:采用 LCD 液晶显示,可以显示所有字符及自定义字符,并能同时显 示多组数据汉字,字符清晰。由于自身具有控制器,不但可以减轻主 单片机的负担, 而且可以实现菜单驱动方式的显示结果,实现编辑模 块全屏幕编辑的功能,达到友好的人机界面。用 LCD 显示,能解决 LED 只能显示数字等几个简单字符的缺点,接口电路简单,性能好, 效果多,控制方便,显示的方式多。 比较上述两种方案,采用方案二。
基于MSP430和DDS的可控波形发生器
基于MSP430和DDS的可控波形发生器【摘要】介绍一种频率、幅值可控的波形发生器的设计方案,以MSP430单片机作为控制核心,直接数字合成(DDS)技术完成多功能高频正弦波、方波信号发生器,通过键盘选择输出的波形及其频率值和幅值,实现信号的数据处理和实时显示。
该设计实现了信号的宽频率输出、波形的自动切换、100Hz频率步进和幅值可变的功能。
测试结果表明,该系统输出信号频率精度高、幅值范围宽,波形清晰、精度高等特点,有较高的使用价值。
【关键词】波形发生器;MSP430;DDS;自动切换0 引言随着我国经济和科技的发展,对各种测试仪器和测试手段也提出了更高的要求[1]。
与传统函数发生器相比,本设计具有硬件电路简单、波形清晰、频率幅值可控性高、波形任意切换等优点,而且还具有自动化、数字化、可编程化和数据高速处理的功能,能够满足实验室多数实验对信号源的要求。
直接数字频率合成(DDS)[2]技术是近年来迅速发展的一种新型频率合成技术。
DDS具有很宽的频率输出范围,极高的频率分辨率和输出精度,以及较低的相位噪声优点。
信号源是现代电子设备和系统中的重要组成部分,在通信系统、电子测量以及各种科学实验中,常常需要一个高精度的频率可变信号源,并且要求数字可控[3]。
因此研究一种全自动化、可控性好、精度高的信号发生源具有一定的实用价值和经济效应。
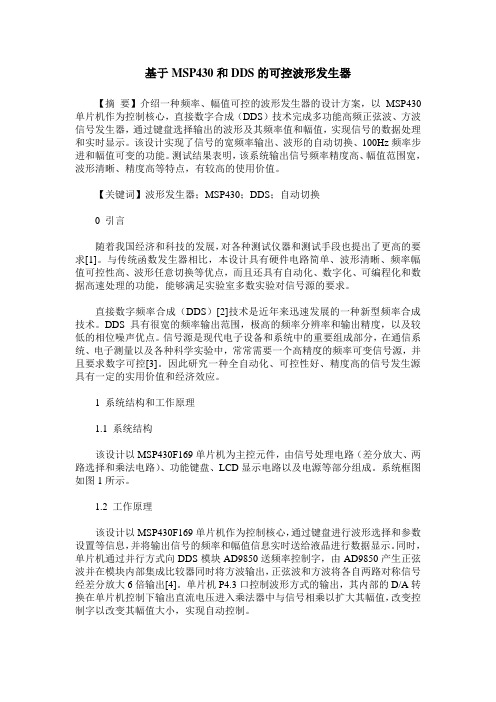
1 系统结构和工作原理1.1 系统结构该设计以MSP430F169单片机为主控元件,由信号处理电路(差分放大、两路选择和乘法电路)、功能键盘、LCD显示电路以及电源等部分组成。
系统框图如图1所示。
1.2 工作原理该设计以MSP430F169单片机作为控制核心,通过键盘进行波形选择和参数设置等信息,并将输出信号的频率和幅值信息实时送给液晶进行数据显示。
同时,单片机通过并行方式向DDS模块AD9850送频率控制字,由AD9850产生正弦波并在模块内部集成比较器同时将方波输出,正弦波和方波将各自两路对称信号经差分放大6倍输出[4]。
MSP430引脚功能介绍和寄存器详细分类汇编

引脚功能引脚名称序号I/O 说明Avcc 64 模拟供电电源正端.只为ADC和DAC的模拟部分供电Avss 62 模拟供电电源负端.只为ADC和DAC的模拟部分供电DVcc 1 数字供电电源正端.为所有数字部分供电DVss 63 数字供电电源负端.为所有数字部分供电P1.0/TACLK 12 I/O 通用数字I/O引脚/定时器A时钟信号TACLK输入P1.1/TA0 13 I/O 通用数字I/O引脚/定时器A捕捉:CCI0A输入,比较:OUT0输出P1.2/TA1 14 I/O 通用数字I/O引脚/定时器A捕捉:CCI1A输入,比较:OUT1输出P1.3/TA2 15 I/O 通用数字I/O引脚/定时器A捕捉:CCI2A输入,比较:OUT2输出P1.4/SMCLK 16 I/O 通用数字I/O引脚/SMCLK信号输出P1.5/TA0 17 I/O 通用数字I/O引脚/定时器A,比较:OUT0输出P1.6/TA1 18 I/O 通用数字I/O引脚/定时器A,比较:OUT1输出P1.7/TA2 19 I/O 通用数字I/O引脚/定时器A,比较:OUT2输出P2.0/ACLK 20 I/O 通用数字I/O引脚/ACLK输出P2.1/TAINCLK 21 I/O 通用数字I/O引脚/定时器A,INCLK上的时钟信号P2.2/CAOUT/TA0 22 I/O 通用数字I/O引脚/定时器A捕获:CCI0B输入/比较器输出P2.3/CA0/TA1 23 I/O 通用数字I/O引脚/定时器A,比较:OUT1输出/比较器A输入P2.4/CA1/TA2 24 I/O 通用数字I/O引脚/定时器A,比较:OUT2输出/比较器A输入P2.5/Rosc 25 I/O 通用数字I/O引脚,定义DCO标称频率的外部电阻输入P2.6/ADC12CLK/ 26 I/O 通用数字I/O引脚,转换时钟-12位ADC,DMA通道0外部触发器P2.7/TA0 27 I/O 通用数字I/O引脚/定时器A比较:OUT0输出P3.0/STE0 28 I/O 通用数字I/O引脚,USART0/SPI模式从设备传输使能端P3.1/SIMO0/SDA 29 I/O 通用数字I/O引脚,USART0/SPI模式的从入/主出,I2C数据P3.2/SOMI0 30 I/O 通用数字I/O引脚,USART0/SPI模式的从出/主入P3.3/UCLK0/SCL 31 I/O 通用数字I/O引脚,USART0/SPI模式的外部时钟输入,USART0 P3.4/UTXD0 32 I/O 通用数字I/O引脚,USART0/UART模式的传输数据输出P3.5/URXD0 33 I/O 通用数字I/O引脚,USART0/UART模式的接收数据输入P3.6/UTXD1 34 I/O 通用数字I/O引脚,USI1/UART模式的发送数据输出P3.7/URXD1 35 I/O 通用数字I/O引脚,USI1/UART模式的接收数据输入P4.0/TB0 36 I/O 通用数字I/O引脚,捕获I/P或者PWM输出端口-定时器B7 CCR0P4.1/TB1 37 I/O 通用数字I/O引脚,捕获I/P或者PWM输出端口-定时器B7 CCR1P4.2/TB2 38 I/O 通用数字I/O引脚,捕获I/P或者PWM输出端口-定时器B7 CCR2P4.3/TB3 39 I/O 通用数字I/O引脚,捕获I/P或者PWM输出端口-定时器B7 CCR3P4.4/TB4 40 I/O 通用数字I/O引脚,捕获I/P或者PWM输出端口-定时器B7 CCR4P4.5/TB5 41 I/O 通用数字I/O引脚,捕获I/P或者PWM输出端口-定时器B7 CCR5P4.6/TB6 42 I/O 通用数字I/O引脚,捕获I/P或者PWM输出端口-定时器B7 CCR6P4.7/TBCLK 43 I/O 通用数字I/O引脚,输入时钟TBCLK-定时器B7P5.0/STE1 44 I/O 通用数字I/O引脚,USART1/SPI模式从设备传输使能端P5.1/SIMO1 45 I/O 通用数字I/O引脚,USART1/SPI模式的从入/主出P5.2/SOMI1 46 I/O 通用数字I/O引脚,USART1/SPI模式的从出/主入P5.3/UCLK1 47 I/O 通用数字I/O引脚,USART1/SPI模式的外部时钟输入,USART0/SPI 模式的时钟输出- 8 -P5.4/MCLK 48 I/O 通用数字I/O引脚,主系统时钟MCLK输出P5.5/SMCLK 49 I/O 通用数字I/O引脚,子系统时钟SMCLK输出P5.6/ACLK 50 I/O 通用数字I/O引脚,辅助时钟ACLK输出P5.7/TboutH/ 51 I/O 通用数字I/O引脚,将所有PWM数字输出端口为高阻态-定时器B7P6.0/A0 59 I/O 通用数字I/O引脚,模拟量输入A0-12位ADCP6.1/A1 60 I/O 通用数字I/O引脚,模拟量输入A1-12位ADCP6.2/A2 61 I/O 通用数字I/O引脚,模拟量输入A2-12位ADCP6.3/A3 2 I/O 通用数字I/O引脚,模拟量输入A3-12位ADCP6.4/A4 3 I/O 通用数字I/O引脚,模拟量输入A4-12位ADCP6.5/A5 4 I/O 通用数字I/O引脚,模拟量输入A5-12位ADCP6.6/A6/DAC0 5 I/O 通用数字I/O引脚,模拟量输入A6-12位ADC,DAC.0输出P6.7/A7/DAC1/ 6 I/O 通用数字I/O引脚,模拟量输入A7-12位ADC,DAC.1输出,SVS输入RST/NMI 58 I 复位输入,不可屏蔽中断输入端口或者Bootstrap Lload启动(FLASHTCK 57 I 测试时钟,TCK是芯片编程测试和bootstrap loader启动的时钟输入端口TDI 55 I 测试数据输入,TDI用作数据输入端口,芯片保护熔丝连接到TDITDO/TDI 54 I/O 测试数据输出端口,TDO/TDI数据输出或者编程数据输出引脚TMS 56 I 测试模式选择,TMS用作芯片编程和测试的输入端口VeREF+ 10 I/P 外部参考电压的输入VREF+ 7 O 参考电压的正输出引脚VREF-/VeREF- 11 O 内部参考电压或者外加参考电压的引脚XIN 8 I 晶体振荡器XT1的输入端口,可连接标准晶振或者钟表晶振XOUT/TCLK 9 I/O 晶体振荡器XT1的输出引脚或测试时钟输入XT2IN 53 I 晶体振荡器XT2的输入端口,只能连接标准晶振XT2OUT 52 O 晶体振荡器XT2的输出引脚时钟模块76543210 DCO.2DCO.1DCO.0MOD.4MOD.3MOD.2MOD.1MOD.0DCO.0-DCO.4 定义8 种频率之一,可以分段调节DCOCLK 频率,相邻两种频率相差10%。
MSP430程序库之定时器TA的PWM输出
MSP430程序库之定时器TA的PWM输出定时器是单片机常用的其本设备,用来产生精确计时或是其他功能;msp430的定时器不仅可以完成精确定时,还能产生PWM波形输出,和捕获时刻值(上升沿或是下降沿到来的时候)。
这里完成一个比较通用的PWM波形产生程序。
1.硬件介绍:MSP430系列单片机的TimerA结构复杂,功能强大,适合应用于工业控制,如数字化电机控制,电表和手持式仪表的理想配置。
它给开发人员提供了较多灵活的选择余地。
当PWM 不需要修改占空比和时间时,TimerA 能自动输出PWM,而不需利用中断维持PWM输出。
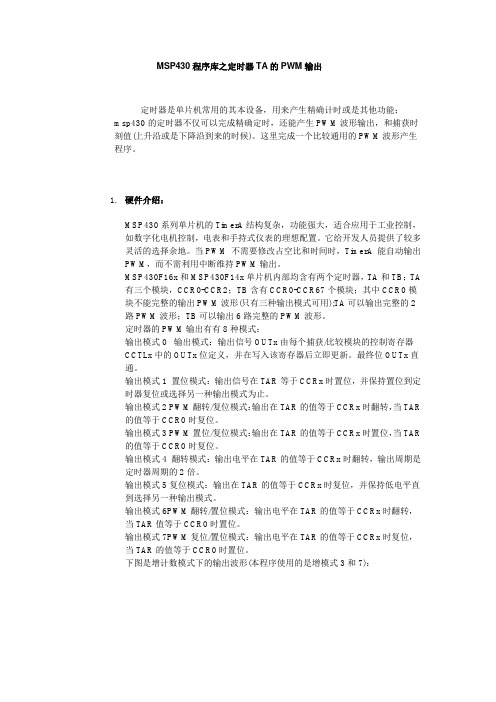
MSP430F16x和MSP430F14x单片机内部均含有两个定时器,TA和TB;TA 有三个模块,CCR0-CCR2;TB含有CCR0-CCR67个模块;其中CCR0模块不能完整的输出PWM波形(只有三种输出模式可用);TA可以输出完整的2路PWM波形;TB可以输出6路完整的PWM波形。
定时器的PWM输出有有8种模式:输出模式0 输出模式:输出信号OUTx由每个捕获/比较模块的控制寄存器CCTLx中的OUTx位定义,并在写入该寄存器后立即更新。
最终位OUTx直通。
输出模式1 置位模式:输出信号在TAR等于CCRx时置位,并保持置位到定时器复位或选择另一种输出模式为止。
输出模式2 PWM翻转/复位模式:输出在TAR的值等于CCRx时翻转,当TAR 的值等于CCR0时复位。
输出模式3 PWM置位/复位模式:输出在TAR的值等于CCRx时置位,当TAR 的值等于CCR0时复位。
输出模式4 翻转模式:输出电平在TAR的值等于CCRx时翻转,输出周期是定时器周期的2倍。
输出模式5复位模式:输出在TAR的值等于CCRx时复位,并保持低电平直到选择另一种输出模式。
输出模式6PWM翻转/置位模式:输出电平在TAR的值等于CCRx时翻转,当TAR值等于CCR0时置位。
输出模式7PWM复位/置位模式:输出电平在TAR的值等于CCRx时复位,当TAR的值等于CCR0时置位。
基于MSP430的信号波形发生器的电路设计与实现

基于MSP430的信号波形发生器的电路设计与实现【摘要】设计制作一个马鞍波、方波、三角波的信号波形发生器。
系统包括方波振荡电路、分频与滤波电路、移相电路、加法合成电路、峰值检测电路、ADC转换电路、单片机控制电路与LCD显示电路。
系统界面友好,工作稳定。
【关键词】NE555;分频;滤波;MSP430F1471.方案论证与选择1.1 波形发生器选择方案一:采用RC振荡电路,此方案产生的方波信号频率精度不高。
方案二:选用NE555构成多谐振荡器产生方波,此方案电路简单、方便、灵活、频率稳定,故选用此方案。
1.2 分频与滤波电路的选择方案一:分别用低通滤波器和带通滤波器对方波进行处理得到所需正弦波。
其中低通滤波器的作用是把10KHz的方波滤波处理得到10KHz的正弦波,带通滤波器的作用则是为了得到30KHz和50KHz的正弦波。
此方案较容易得到10KHz的正弦波,但是带通滤波器的制作精度困难,不易得到30KHz和50KHz 的正弦波。
方案二:利用NE555产生一个150KHz的方波,再用HCF4017分别实现5分频、3分频得到10KHz、30KHz、50KHz的方波,然后采用由TLC04、OP07等运算放大器构成的低通滤波器进行滤波得到10KHz、30KHz、50KHz的正弦波。
此方案的关键在于不同频率低通滤波器的设计,通过合理选择参数,容易实现,故选用此方案。
2.系统总体方案设计2.1 总体设计思路波形产生电路由NE555振荡电路构成,产生150KHz的方波;经分频得到10KHz、30KHz、50KHz的方波;再通过由TLC04和OP27构成的低通滤波电路得到10KHz、30KHz、50KHz的正弦波;然后通过由OP27组成的合成电路分别得到马鞍波、方波、三角波波形。
同时以MSP430F147作为主控芯片,将三路正弦波通过由选通芯片CD4052和放大器OPA820组成的峰值检测电路得到的结果用TLV1544C进行A/D转换并在LCD上显示。
基于MSP430F449的低频波形发生器
基于MSP430F449的低频波形发生器摘要:本文介绍一个利用MSP430单片机输出PWM信号产生的低频波形发生器。
频率变化范围20Hz~200Hz,频率步进值为1Hz,输出频率可预置,输出的信号峰-峰值可分别在±10V~±18V范围调整,信号波形可预置,数字显示输出波形的频率。
关键字:PWM;波形发生器;MSP430单片机中图分类号:TP 368.1 文献标识码:A波形发生器是电子实验中不可缺少的设备。
波形发生器通常采用以下两种方法产生波形:一种是采用模拟电子器件利用谐振或比较原理产生波形,缺点是存在波形失真和稳定性较差;另一种是采用单片机或存储器驱动数模转换器产生波形,波形准确度由数模转换器位数、准确度和时钟准确度决定。
本文介绍波形发生器是利用MSP430单片机输出的PWM信号代替数模转换器构成低频波形发生器。
1 工作原理德州仪器公司生产的MSPF449单片机功能框图如图1所示。
图1MSP430F449功能框图其中定时器A和B具有输出多路PWM型号功能。
PWM信号实例如图2所示,将其滤波后输出的信号是模拟信号。
控制生成PWM信号的捕获/比较控制寄存器,使PWM按正弦波、三角波、方波、梯形波、锯齿波等多种波形变化即可开发出能产生正弦波、三角波、方波、梯形波、锯齿波等多种波形的波形发生器,并可以根据实际需要在单片机的波形存储器中写入不同波形,随时更改、添加,能满足一般实验及演示需要。
图2 PWM 时序图2 电路设计波形发生器电路主要由PWM 数模转换电路、PWM 数模转换电源电路和MSP430F449单片机系统电路构成。
⑴PWM 数模转换电路如图3所示,TB1、TB2输出两路互补PWM 脉冲,经光电隔离器分别使滤波电路接于VDD 或VEE 产生对称电压的PWM ,消除因电源电压补对称产生的波形失真。
图3 PWM 数模转换电路⑵PWM 数模转换电源电路如图4所示,由LM317、LM337产生对称正负电源。
msp430TAx PWM输出详解
对于那么多的TAx输出口,那么多的模式,真是不知所措,那么今天让我们来详细的讨论一下msp430单片机TAx哪些管脚可以输出,以及其输出模式又是怎样的,又该怎样写程序.不着急一步一步来首先让我们来了解下关于输出模式:(1)模式0(电平输出):在输出模式0下,TAx管脚与普通的输出IO口一样,可以由软件操作OUT控制位来控制TAx管脚的高低电平。
(2)模式1与模式5(单脉冲输出):利用比较模块的模式1和模式5,可以替代单稳态电路,产生单脉冲波形。
在输出模式1下,当主计数器计至TACCRx值时,TAx管脚置1。
如果通过OUT控制位事先将TAx的输出设为低,经过TACCRx个周期后,TAx将自动变高。
这样做可以输出一个低电平脉冲。
通过改变TACCRx 的值,可以改变低电平脉冲的周期,且脉冲过程无需CPU的干预。
在输出模式5下,当主计数器计至TACCRx值时,TAx管脚置0.如果通过OUT 控制位事先将TAx输出设置为高,经过TACCRx个周期后,TAx将自动变低。
这样做可以输出一个高电平脉冲。
通过改变TACCRx的值可以改变该点评脉冲的周期,且脉冲过程无需CPU的干预。
(3)模式3和模式7(PWM输出):脉宽调制是最常用的功率调整手段之一。
所谓脉宽调制,顾名思义,是指在脉冲方波周期一定的情况之下,通过调整脉冲的宽度,改变负载通断时间的比例,以达到功率调节的目的。
PWM波形中,负载接通时间与一个周期总时间之比叫做占空比。
占空比越大,负载功率就越大。
如果PWM频率足够高以至于不足以表现表现出负载断续,从宏观上看,负载实际功率将是连续的。
在PWM调整负载功率的过程中,负载断开时晶体管无电流通过,不发热。
负载接通时晶体管饱和,虽然通过有较大电流,但压降很小,发热功率也很低。
所以使用PWM控制负载时,开关器件的总发热量很小。
相比于串联耗散式的调整方法,效率会高很多,适合大功率,高效率的负载调整应用。
但PWM的缺点是负载功率高频波动很大,不适合要求输出平稳无纹波要求的场合。
MSP430简介(超详细·)
msp430简介MSP430是德州公司新开发的一类具有16位总线的带FLASH 的单片机,由于其性价比和集成度高,受到广大技术开发人员的青睐.它采用16位的总线,外设和内存统一编址,寻址范围可达64K,还可以外扩展存储器.具有统一的中断管理,具有丰富的片上外围模块,片内有精密硬件乘法器、两个16位定时器、一个14路的12位的模数转换器、一个看门狗、6路P口、两路USART通信端口、一个比较器、一个DCO内部振荡器和两个外部时钟,支持8M 的时钟.由于为FLASH型,则可以在线对单片机进行调试和下载,且JTAG口直接和FET(FLASH EMULATION TOOL)的相连,不须另外的仿真工具,方便实用,而且,可以在超低功耗模式下工作对环境和人体的辐射小,测量结果为100mw左右的功耗(电流为14mA左右),可靠性能好,加强电干扰运行不受影响,适应工业级的运行环境,适合与做手柄之类的自动控制的设备.我们相信MSP430单片机将会在工程技术应用中得以广泛应用,而且,它是通向DSP系列的桥梁,随着自动控制的高速化和低功耗化, MSP430系列将会得到越来越多人的喜爱.一、IO口(一)、P口端口寄存器:1、PxDIR 输入/输出方向寄存器(0:输入模式 1:输出模式)2、PxIN 输入寄存器输入寄存器是只读寄存器,用户不能对其写入,只能通过读取该寄存器的内容知道I/O口的输入信号。
3、PxOUT 输出寄存器寄存器内的内容不会受引脚方向改变的影响。
4、PxIFG 中断标志寄存器(0:没有中断请求 1:有中断请求)该寄存器有8个标志位,对应相应的引脚是否有待处理的中断请求;这8个中断标志共用一个中断向量,中断标志不会自动复位,必须软件复位;外部中断事件的时间必须>=1.5倍的MCLK的时间,以保证中断请求被接受;5、PxIES 中断触发沿选择寄存器(0:上升沿中断 1:下降沿中断)6、PxSEL 功能选择寄存器(0:选择引脚为I/O端口 1:选择引脚为外围模块功能)7、PxREN 上拉/下拉电阻使能寄存器(0:禁止 1:使能)(二)、常用特殊P口:1、P1和P2口可作为外部中断口。
第6章MSP430单片机的输入输出模块
6.1 通用IO端口
6.1.3 端口P1和P2
7.中断使能寄存器PxIE 该寄存器的8位与该端口的8个引脚一一对应,其中每一位用以控制相应引脚的中断 允许。 8.中断触发边沿选择寄存器PxIES 如果允许Px口的某个引脚中断,还需定义该引脚的中断触发沿。该寄存器的8位分别 定义了Px口的8个引脚的中断触发沿。
6.1 通用IO端口
6.1.2 通用IO端口输出特性
MSP430单片机在默认输出驱动(PxDS.y=0,即欠驱动强度)且单片机供电电压VCC为 3V条件下,端口低电平和高电平的输出特性分别如图6.1.1和图6.1.2所示,其中,电流输入 为正,输出为负。
图6.1.1 低电平输出特性(PxDS.y=0)
采样频率采样频率也称为采样速率或者采样率定义为每秒从连续信号中提取并组成离散信号的采样个?采样频率也称为采样速率或者采样率定义为每秒从连续信号中提取并组成离散信号的采样个数单位为赫兹hz
合肥工业大学DSP及MSP430实验室
MSP430单片机原理与应用
/msp430
第六章 MSP430单片机的输入输出模块
单片机中的输入/输出模块是供信号输入、输出所用的模块化单元。MSP430单片机的片内输入/ 输出模块非常丰富,典型的输入/输出模块有:通用I/O端口、模数转换模块、比较器、定时器与段式 液晶驱动模块。本章重点讲述各典型输入/输出模块的结构、原理及功能,并针对各个模块给出简单 的应用例程。
图6.1.2 高电平输出特性(PxDS.y=0)
6.1 通用IO端口
6.1.2 通用IO端口输出特性
当PxDS.y控制位被配置为1时,即单片机端口被配置为强驱动模式。在强驱动模式下, 端口的低电平和高电平输出特性分别如图6.1.5和图6.1.6所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要
本设计采用430在DAC有效工作范围内,实现正弦波形信号、锯齿波形信号、方波信号输出。
并且努力实现优化设计1. 信号波形参数可以使用键盘输入设置调整,并在LED阵列回显2. 可以使用计算机辅助设定任意波形信号数据,并使用串行接口输入系统实现波形产生输出。
目录
1、方案原理--------------------------------------------------------------------------------------------3
1.1波形选择和调节波形方案------------------------------------------------------------------3
1.2方波输出方案----------------------------------------------------------------------------------3
1.3正弦波输出方案-------------------------------------------------------------------------------3
1.4三角波输出方案-------------------------------------------------------------------------------4
2、方案的实现------------------------------------------------------------------------------------------5
3、本人在小组中承担的工作-----------------------------------------------------------------------6
4、附录----------------------------------------------------------------------------------------------------6
1方案选择
1.1波形选择和调节波形方案
1.2方波输出方案
方波的产生程序是根据波形的频率要求计算出每次幅值跃变的时间,等到定时器A的即使时间到时进入中断进行一次跃变,而且方波占空比和频率的设置都通过定时器初始数据达到设定的要求
1.3正弦波输出方案
本程序的波形产生原理是将一个波形周期分成n等分,每加上一个偏移量,而这个偏移量就决定了我们的频率大小。
然后调取正弦函数数组
sin_tab[100]中的数据乘以我们的相应幅度值。
1.4三角波输出方案
三角波的产生程序根据波形的频率要求计算出每次幅值变化的时间,写入到计数器中,继而跳去三角波储存数据,uchar code sawtooth_tab[100]依次经过乘法诚意相应的幅度值写入DAC中。
等到定时器A的计时时间到时进入中断变量i进行一次增值。
2、方案的实现
2.1IAR的使用
一.IAR FOR 430 简介
IAR Systems是全球领先的嵌入式系统开发工具和服务的供应商。
公司成立于1983年,迄今已有27年,提供的产品和服务涉及到嵌入式系统的设计、开发和测试的每一个阶段,包括:带有C/C++编译器和调试器的集成开发环境(IDE)、实时操作系统和中间件、开发套件、硬件仿真器以及状态机建模工具。
国内普及的MSP430开发软件种内不多,主要有IAR公司的Embedded Workbench for MSP430(简称为EW430)和AQ430。
目前IAR的用户居多。
IAR EW430软件提供了工程管理,程序编辑,代码下载,调试等所有功能。
并且软件界面和操作方法与IAR EW for ARM等开发软件一致。
因此,学会了IAR EW430,就可以很顺利地过渡到另一种新处理器的开发工作
二.方案实现步骤
1.打开、建立工程并设置
2.编写程序
3. 程序调试
添加好文件后,应该在工程下看到选择需要调试的文件,如main.c
选择(Compile)按钮,对main.c进行编译第一次编译是需要保存Workspace
Files
4.烧入程序
3、本人在小组中承担的工作
本人在小组中负责调试程序,并且调节小组成员的工作。
在调试程序中,我主要负责写正弦波程序和方案选择的程序。
工作亮点是通过学习,掌握了430的中断的使用,并且可以运用到实际操作中。
附录:50Hz正弦波程序
static int Sin_tab[200]={(篇幅有限,这里不做描述)}
void dac12_init() {
DMACTL0 = DMA0TSEL_7;
// Setup DMA0
DMA0SA = (int) Sin_tab; // Source block address
DMA0DA = DAC12_0DAT_; // Destination single address
DMA0SZ = 0xc8; // Block size
DMA0CTL = DMADT_4 + DMASRCINCR_3 + DMAEN; // Rpt single ch, inc src, word-word
ADC12CTL0 = REF2_5V + REFON;
//Setup DAC0 Load with Timer_A, group with DAC1
DAC12_0CTL = DAC12LSEL_2 + DAC12IR + DAC12AMP_2 + DAC12IFG + DAC12ENC; //Setup Timer_A
TACCTL1 = OUTMOD_3; // CCR1 set/reset
TACCR1 = 1; // CCR1 PWM Duty Cycle
TACCR0 = 800; // Clock period of CCR0
TACTL = TASSEL_2 + ID_0 + MC_1; // ACLK, upmode
}
int main(void)
{
int i;
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
_BIS_SR(OSCOFF + SCG0 + GIE); // Disable LFXT1 xtal osc & FLL loop FLL_CTL1 &= ~XT2OFF; // Activate XT2 high freq xtal
// Wait for xtal to stabilize
do
{
IFG1 &= ~OFIFG; // Clear OSCFault flag
for (i = 5; i > 0; i--); // Time for flag to set
}
while ((IFG1 & OFIFG)); // OSCFault flag still set?
FLL_CTL1 |= SELM1; // MCLK = XT2
FLL_CTL1 |=SELS;
dac12_init();
while(1); // Loop in place
}。