温度控制系统 ppt
合集下载
《温度控制PI》课件

《温度控制PI》PPT课件
温度控制PI是一个关键的主题,本PPT课件将探讨温度控制的定义、应用场 景以及PI控制和温度控制PI的具体内容。
什么是温度控制
1 定义
温度控制是一种通过调节系统内的温度来维 持或达到特定温度的过程。
2 应用场景
温度控制在各个行业中都有广泛的应用,例 如制造业、医疗设备和食品加工等。
PI控制
1 概述
P制。
2 PI参数
PI控制的两个关键参数是比例增益和积分时间,它们的选择对控制性能至关重要。
3 PI控制器原理
PI控制器基于误差信号的比例和积分部分,通过对输出信号的调整来稳定系统。
温度控制PI
1
温度控制流程分析
了解温度控制的整个流程,包括测量、反馈和控制。
2
PI控制在温度控制中的应用
探讨PI控制在温度控制中的优势和适用性。
3
温度控制PI系统设计实例
通过实例演示如何设计一个有效的温度控制PI系统。
总结
温度控制PI的优势
温度控制PI具有高精度、稳定性和可靠性的优势, 能够满足各种需求。
发展趋势
随着科技的进步,温度控制PI将继续发展,并在 更多领域得到应用。
4-1 冷却水温度控制系统
R12 R6 + W2 ( R8 + W2 ) R4 R5C2 S U5 = ⋅ [ + 1]U B R9 R4 R8 ( R6 + W1 )( R2C2 S + 1)
若R5>>R2,则:
dU B U 5 = K (U B + Td ⋅ ) dt
K =
R12 ( R6 + W1 ) R9 R4
——比例放大倍数 ( 由 W1 调比例带 ) 比例放大倍数( 调比例带) 比例放大倍数
MR— MR—Ⅱ型电动 冷却水温度控制 原理图
减少输出继电器断续通电, 断续闭合→ 若 t>tr→ 减少输出继电器断续通电 , SW1 断续闭合 → 伺服 电机M逆时针断续转动→关小旁通阀,开大冷却水阀( 电机M逆时针断续转动→关小旁通阀,开大冷却水阀(两个 互成90 的平板阀) 水温↓ 互成900的平板阀)→水温↓ 减少) 增加) SW1( 减少 ) 或 SW2( 增加 ) 继电器中串联了一个由限 位开关和过载保护继电器控制的开关Sr 电流过大, 位开关和过载保护继电器控制的开关 Sr3。 若 M 电流过大 , 过载保护继电器动作→ 断电→ 均断电→ 电机M 过载保护继电器动作 → Sr2 断电 → SW1 和 SW2 均断电 → 电机 M 断电 当M带动三通调节阀走到极限位置时→限位开 带动三通调节阀走到极限位置时→ 关断开→ 均断电, 断电( 关断开→SW1和SW2均断电,M断电(防止平板阀卡在极限位 置或起动过载) 置或起动过载)
第四章 自动控制系统
MR— §4-1 MR—Ⅱ型电动冷却水温度控制系统
属需外加电源的间接作用基地式仪表,能实现PD控制规律 属需外加电源的间接作用基地式仪表,能实现PD控制规律 PD 组成及工作过程 测量元件 热敏电阻T802( 插于进口管中 , 电阻值随水温作线性变 插于进口管中, 热敏电阻 T 化)。 测量信号→ 测量信号→分压器分配后变成电压信号 偏差e 定位器调定给定值电压信号 →偏差e,经 PD作用→连续信号→ PD作用→连续信号→经脉冲宽度调制器变成脉冲信号 作用
温度控制系统
器
电信号Βιβλιοθήκη 非电信号二次仪表可处理信号
显示调节仪表
电信号
显 示 滤波、放大、 调 非线性校正 节 仪 表
温度
电压
流量
位移
在自动化控制系统中,二次仪表经常处于核心地位,因此对其进行认 真比较和精心选择,在安全上是必须的,在经济上是划算的。
执行器部分
为了能够对工业对象的参数进行自动控制(或报警),就必须由中间继电器、 可控硅、电磁阀等执行器执行对负载的调控。 执行器一般都工作于高电压、大电流、多动作的恶劣工作条件下,因此, 正确选择产品和降额使用是理所当然和十分经济的。
值时作出报警动作,而无论是上限、上上限、下限、下下限报警。 默认
的报警动作是报警输出继电器的常开触点闭合。
4.安装与接线
5.仪表面板布置和功能
6.使用指南
① 使用软件锁 ② 设置“控制”值 ③ 设置“误差修正”值 ④ 设置“报警”值 ⑤ 自整定功能 ⑥ 比例偏置功能 ⑦ 仪表若显示“ HH”,请检查传感器是否断线或输入超过了量程上
8.3 温度控制器的调节原理
8.3.1 二位式调节原理
二位式调节又称通断式控制,其工作原理是将测量值与设定值相比较,差值经 放大处理后,对执行器进行开(通)或关(断)的控制,主要由温度传感器、 温度控制器、执行器和电阻丝组成。
滞后时间:由于电炉炉体为保 温隔热材料制成的密闭箱体, 刚开始加热时,有一段时间炉 体温度基本保持不变,这一段 时间称之为滞后时间,其大小 通常取决于炉体结构,尤其是 炉体体积。
2.型号编制说明 例8-3 试说明型号为WG-5412温度控制器的主要性能。
解:(1)该仪表是智能型双三位显示调节仪; (2)调节方式为二位PID调节; (3)报警为上限报警; (4)输入信号采用热电阻温度传感器; (5)输出信号为继电器触点输出。
温度控制系统的发展概况

时滞温度控制系统是一个具有重要应用价值的系统,其运行过程中存在明显 的滞后效应。滞后效应的产生主要是由于物质传输、热量传递和系统自身动力等 方面的原因,使得控制系统对温度变化的响应变得迟缓。为了有效提高时滞温度 控制系统的性能,研究者们不断探索新的控制方法。
随着科学技术的不断发展,时滞温度控制系统的研究已经取得了一定的成果。 然而,现有的控制方法仍然存在诸多不足,如控制精度不高、稳定性差、不能有 效处理时滞等问题。因此,探索更为有效的控制方法显得尤为重要。
本次演示对时滞温度控制系统控制方法的研究进行了综述,总结了现有方法 的优缺点,并针对存在的问题提出了一种新的自适应控制方法。通过实验设计和 仿真技术验证了该方法的有效性。未来的研究方向可以包括探索更加智能和适应 复杂环境变化的
控制算法,为实际工业应用提供更加可靠和精准的温度控制方案。
感谢观看
总之,温度控制系统的发展概况表明,随着技术的不断进步和创新,温度控 制系统的应用领域越来越广泛,其基本构成更加完善,发展前景广阔。相信未来 温度控制系统会朝着更加智能化、网络化、高精度和高效率的方向迈进,为推动 现代工业和科技的发展做出更大的贡献。
参考内容
随着科技的不断发展,智能化成为各行各业的主要趋势。温度控制作为日常 生活和工业生产中的重要环节,如何实现智能化以提高效率、节约能源以及提高 生产质量,已成为业界的焦点。本次演示将介绍一种智能温度控制系统,包括其 设计、应用及未来发展前景。
此外,温度控制系统在建筑、食品、医药等各个行业中也有着广泛的应用。 例如,在建筑行业中,温度控制系统能够保证室内恒温,提高居住舒适度;在食 品行业中,温度控制系统能够实现对食品的恒温干燥,保证食品的口感和营养价 值;在医药行业
中,温度控制系统能够确保药品生产过程中的温度稳定,提高药品的质量和 安全性。
智能型电冰箱温度控制系统 ppt课件
PPT模板下载: 行业PPT模板:
节日PPT模板:
PPT素材下载:
PPT背景图片: PPT图表下载:
优秀PPT下载: PPT教程:
Word教程:
Excel教程:
资料下载:
PPT课件下载:
范文下载:
试卷下载:
教案下载: PPT论坛:
精品资料
• 你怎么称呼老师? • 如果老师最后没有总结一节课的重点的难点,你
PPT模板下载: 行业PPT模板:
节日PPT模板:
PPT素材下载:
PPT背景图片: PPT图表下载:
优秀PPT下载: PPT教程:
Word教程:
Excel教程:
资料下载:
PPT课件下载:
范文下载:
试卷下载:
教案下载: PPT论坛:
设计的总体设计框图
外围电路的设计师保证电冰箱核心芯片
AT89C51单片机正常稳定工作的保证,设计
是否会认为老师的教学方法需要改进? • 你所经历的课堂,是讲座式还是讨论式? • 教师的教鞭 • “不怕太阳晒,也不怕那风雨狂,只怕先生骂我
笨,没有学问无颜见爹娘 ……” • “太阳当空照,花儿对我笑,小鸟说早早早……”
本电冰箱电控系统的主要功能
1.设置三个温度测量点。 数量范围-26°C至+ 26°C,精度±0.5°C;; 2.蒸发器、冷冻室和冷藏室温度设定等都是由功能按键分别调控; 3.利用液晶显示冷冻室、冷藏室温度,冰箱门报警倒计时; 4.当冷冻压缩机停止3分钟时,它会再次自动启动。 5.冷冻机具有自动除霜功能,当霜厚达到3毫米时会自动解压。 6.当冰箱门未关闭延时超过2分钟自动报警; 工作电压180至240 V,当过电压或者欠电压,按键失灵,仿真电路中所 有原件停止运行
锅炉蒸汽温度控制系统优秀课件.ppt

(4) 受热面结渣
再热器受热面结渣或积灰,吸热量减少,再热汽 温降低。
炉膛水冷壁结渣,水冷壁吸热量减少,导致炉膛 出口烟温上升,再热器吸热增加,再热汽温提高。
锅炉蒸汽温度控制系统优秀课件 8
第五章 锅炉蒸汽温度控制系统
(5) 过热蒸汽温度和压力
过热蒸汽温度变化会引起高压缸排汽变化。过热汽 温降低,高压缸排汽温度降低;在再热器吸热量不变的 条件下,因再热器进口温度降低,导致再热器出口温度 降低。
锅炉蒸汽温度控制系统优秀课件 10
第五章 锅炉蒸汽温度控制系统
有延迟,有惯性, 有自平衡能力。
图5-1 蒸汽量变化与对流过热器及辐射过热 器出口汽温变化的静态特性
图5-2 蒸汽量变化对过热器汽 温的影响
实际生产中,通常把两种过热器结合使用,还增 设屏式过热器,且对流方式下吸收的热量比辐射方式 下吸收的热量要多,因此综合而言,过热器出口汽温 是随流量D的增加而升高的。动态特性如图5-2所示。
锅炉蒸汽温度控制系统优秀课件 4
第五章 锅炉蒸汽温度控制系统
(2) 给水温度与汽温的关系
提高给水温度,将使过热汽温下降,这是因为产生 每千克蒸汽需要的燃料量减少了,流经过热器的烟气量 也减少了。也可以这样认为:提高给水温度后,在相同 的燃料量下,锅炉的蒸发量增加了,故过热气温将下降。 因此,是否投入高加将使给水温度相差很大,这对过热 气温有明显影响。
锅炉蒸汽温度控制系统优秀课件 7
第五章 锅炉蒸汽温度控制系统
(3) 炉膛火焰中心
炉膛火焰中心的高度对再热汽温有相当显著的影 响,是调节再热汽温的主要手段。当火焰中心抬高时, 炉膛出口温度上升,以对流受热面为主的再热器其进 口烟温升高,吸热量增加,再热汽温提高;反之,再 热器吸热量减少,再热汽温降低。
再热器受热面结渣或积灰,吸热量减少,再热汽 温降低。
炉膛水冷壁结渣,水冷壁吸热量减少,导致炉膛 出口烟温上升,再热器吸热增加,再热汽温提高。
锅炉蒸汽温度控制系统优秀课件 8
第五章 锅炉蒸汽温度控制系统
(5) 过热蒸汽温度和压力
过热蒸汽温度变化会引起高压缸排汽变化。过热汽 温降低,高压缸排汽温度降低;在再热器吸热量不变的 条件下,因再热器进口温度降低,导致再热器出口温度 降低。
锅炉蒸汽温度控制系统优秀课件 10
第五章 锅炉蒸汽温度控制系统
有延迟,有惯性, 有自平衡能力。
图5-1 蒸汽量变化与对流过热器及辐射过热 器出口汽温变化的静态特性
图5-2 蒸汽量变化对过热器汽 温的影响
实际生产中,通常把两种过热器结合使用,还增 设屏式过热器,且对流方式下吸收的热量比辐射方式 下吸收的热量要多,因此综合而言,过热器出口汽温 是随流量D的增加而升高的。动态特性如图5-2所示。
锅炉蒸汽温度控制系统优秀课件 4
第五章 锅炉蒸汽温度控制系统
(2) 给水温度与汽温的关系
提高给水温度,将使过热汽温下降,这是因为产生 每千克蒸汽需要的燃料量减少了,流经过热器的烟气量 也减少了。也可以这样认为:提高给水温度后,在相同 的燃料量下,锅炉的蒸发量增加了,故过热气温将下降。 因此,是否投入高加将使给水温度相差很大,这对过热 气温有明显影响。
锅炉蒸汽温度控制系统优秀课件 7
第五章 锅炉蒸汽温度控制系统
(3) 炉膛火焰中心
炉膛火焰中心的高度对再热汽温有相当显著的影 响,是调节再热汽温的主要手段。当火焰中心抬高时, 炉膛出口温度上升,以对流受热面为主的再热器其进 口烟温升高,吸热量增加,再热汽温提高;反之,再 热器吸热量减少,再热汽温降低。
热工控制系统第八章 汽温控制系统PPT课件

输出对输入x1的传递函数:
W X 1 S x y 1 1 S S 1 W T 1 S W W T 1 T S 2 W S T W 2 D S 1 W S D W 1 D S 2 W S D 2 W m S 1 S W Z S
(8-2) (8-3)
对于一个定值系统,扰动造成的影响应该越小越好,而定值部分应尽量保持恒定,因
1 WB 1
W0(s)
θ2
γθ2
上图中对应的主回路广义调节器的传递函数为:
W T2
sW 2B
1
2
1T1isTds
则主回路广义调节器的等效比例带为:
2
2 1 1 2
此时主回路广义调节器中各参数可以通过试验得到的等效被
控对象W0(s)的输出端过热汽温θ2在减温水量WB扰动下的阶跃响 应曲线,按单回路控制系统整定方法进行计算:(P175表6-6)
(8-5)
则有:
W b 2SK zK T 2K fK 2 1 K T 2K fK 2K m 2K z
T 2 1 K T 2K fK 2K m 2K z S 1
令: K b 2 1 K K T z2 K K T 2 fK K 2 fK K m 2 2K z,T b 2 1 K T 2K T f2 K 2K m 2K z
Iθ 2 -
I 2 1 1
内回路
γθ2
W2(s) θ2
主回路原理方框图 如果主调节器为PID调节器,其传递函数为:
WT2
s
1
2
1T1is
Tds
忽略导前区的惯性和迟延,则简化后导前区传递函数为:
W1
s
1
WB
1
1
此时主回路原理方框图可以简化为:
W X 1 S x y 1 1 S S 1 W T 1 S W W T 1 T S 2 W S T W 2 D S 1 W S D W 1 D S 2 W S D 2 W m S 1 S W Z S
(8-2) (8-3)
对于一个定值系统,扰动造成的影响应该越小越好,而定值部分应尽量保持恒定,因
1 WB 1
W0(s)
θ2
γθ2
上图中对应的主回路广义调节器的传递函数为:
W T2
sW 2B
1
2
1T1isTds
则主回路广义调节器的等效比例带为:
2
2 1 1 2
此时主回路广义调节器中各参数可以通过试验得到的等效被
控对象W0(s)的输出端过热汽温θ2在减温水量WB扰动下的阶跃响 应曲线,按单回路控制系统整定方法进行计算:(P175表6-6)
(8-5)
则有:
W b 2SK zK T 2K fK 2 1 K T 2K fK 2K m 2K z
T 2 1 K T 2K fK 2K m 2K z S 1
令: K b 2 1 K K T z2 K K T 2 fK K 2 fK K m 2 2K z,T b 2 1 K T 2K T f2 K 2K m 2K z
Iθ 2 -
I 2 1 1
内回路
γθ2
W2(s) θ2
主回路原理方框图 如果主调节器为PID调节器,其传递函数为:
WT2
s
1
2
1T1is
Tds
忽略导前区的惯性和迟延,则简化后导前区传递函数为:
W1
s
1
WB
1
1
此时主回路原理方框图可以简化为:
温度控制系统
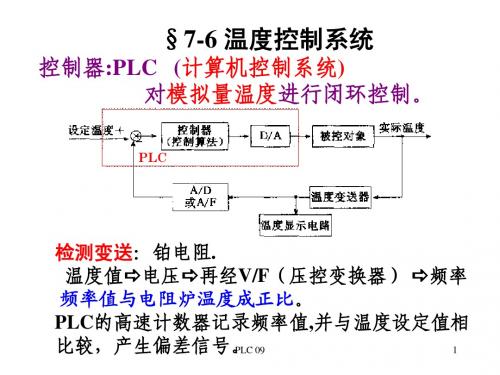
j =0 n
其中: 调节器第n 次采样输出值; 其中:u (n) :调节器第 次采样输出值;
e(n) :第 n 次采样的偏差值; 次采样的偏差值;
e(n − 1) :第 (n-1)次采样的偏差值; 次采样的偏差值; 次采样的偏差值
PLC 09 3
K p :比例系数; 比例系数; 比例系数 Ts K i = K p :积分系数;(教材式 7- 2 有误) 积分系数;( ;(教材式 有误) Ti Td K d = K p :微分系数。 微分系数。 Ts
1 u (t ) = K p [e(t ) + Ti de(t ) ∫0 e(t )dt + Td dt ]
t
2
PLC 09
PID算法的传递函数 算法的传递函数
G ( s) =
U ( s) 1 = K p [1 + + Td s ] E ( s) Ti s
2.数字PID控制算法 .数字 控制算法
位置式算法: 位置式算法 设采样周期为T 离散化连续PID算法 设采样周期为 s,离散化连续 算法 求和代替积分,差分代替微分) (求和代替积分,差分代替微分) Ts n Td u (n) = K p {e(n) + ∑ e( j ) + [e(n) − e( n − 1)]} Ti j = 0 Ts = K p e(n) + K i ∑ e( j ) + K d ∆e(n)
0.8 y (kT − T ) + 0.2 y (kT )
表明: 表明:在滤波结果中起主要作用的是 y(kT−T)
是前一时刻的滤波值而不是当前时刻的采样值。 前一时刻的滤波值而不是当前时刻的采样值。 而不是当前时刻的采样值
y 例如: 相差1倍 例如: (kT − T ) = 0.5, y ( kT ) = 1, 相差 倍; y (kT ) = 0.8 y (kT − T ) + 0.2 y (kT ) = 0.6
其中: 调节器第n 次采样输出值; 其中:u (n) :调节器第 次采样输出值;
e(n) :第 n 次采样的偏差值; 次采样的偏差值;
e(n − 1) :第 (n-1)次采样的偏差值; 次采样的偏差值; 次采样的偏差值
PLC 09 3
K p :比例系数; 比例系数; 比例系数 Ts K i = K p :积分系数;(教材式 7- 2 有误) 积分系数;( ;(教材式 有误) Ti Td K d = K p :微分系数。 微分系数。 Ts
1 u (t ) = K p [e(t ) + Ti de(t ) ∫0 e(t )dt + Td dt ]
t
2
PLC 09
PID算法的传递函数 算法的传递函数
G ( s) =
U ( s) 1 = K p [1 + + Td s ] E ( s) Ti s
2.数字PID控制算法 .数字 控制算法
位置式算法: 位置式算法 设采样周期为T 离散化连续PID算法 设采样周期为 s,离散化连续 算法 求和代替积分,差分代替微分) (求和代替积分,差分代替微分) Ts n Td u (n) = K p {e(n) + ∑ e( j ) + [e(n) − e( n − 1)]} Ti j = 0 Ts = K p e(n) + K i ∑ e( j ) + K d ∆e(n)
0.8 y (kT − T ) + 0.2 y (kT )
表明: 表明:在滤波结果中起主要作用的是 y(kT−T)
是前一时刻的滤波值而不是当前时刻的采样值。 前一时刻的滤波值而不是当前时刻的采样值。 而不是当前时刻的采样值
y 例如: 相差1倍 例如: (kT − T ) = 0.5, y ( kT ) = 1, 相差 倍; y (kT ) = 0.8 y (kT − T ) + 0.2 y (kT ) = 0.6
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
-
4
➢研究内容
本次设计控制对象是1L水的温度,主要要求如下: (1)能够连续测量水的温度值,用LCD1602显示水的实 际温度。 (2)能够设定水的温度值,设定范围是30℃~90℃。 (3)能够实现水温的自动控制,如果设定水温为85℃, 则能使水温保持恒定在85℃的温度下运行。 (4)用DS18B20做温度传感器,用单片机AT89C52和 PID算法控制电加热器,通过矩阵键盘的输入来控制水温 的设定值,数值采用LCD1602显示。
-
21
➢小插曲
6.模块的综合,以前变成的时候都是写小程序,这次 我把这些小模块加在了一起,中间出现了许多的小问题, 使得编译通过不了。总能马上解决的那种。 7.MOC3051和BTA08的电路图我开始不会接,不懂原 理后来问了公司的一个经验比较老道的大哥。弄清原理 后,然后我就按照MOC3051的经典案例接了硬件电路。 最后却忽略了焊锡能通过的最大电流问题。用焊锡部分 用比较粗的导线代替。
-
23
敬请老师批评指正
谢谢!
-
24
根据W_pid的值求出加热的 PID功率求出PWM的占空比
PID算法结束
-
16
按键程序
开始
对阵键盘的对应的 表格赋值,方便后
面查表
P0=oxf0 行为低4 位 列为高4位
判断P0是否等于oxf0 N
延时500us
判断P0是否等于oxf0 N
通过~(P0|ox0f)的 值得到是哪一列有
按键按下
P0=ox0f
-
5
➢研究方案
-
6
USB供电
➢电路设计
-
7
晶振和复位电路
➢电路设计
-
8
程序下载电路
➢电路设计
-
9
报警电路
➢电路设计
-
10
显示电路
➢电路设计
-
11
矩阵键盘
➢电路设计
-
12
温度传感器电路
➢电路设计
-
13
负载驱动电路
➢电路设计
-
14
主程序
注释
在输入没有完成的时候是不会 调用PID算法的, 这个时候的 加热目标值还是上一次的输入 值。 如果输入长时间没有完 成系统是无法正常工作的
-
22
➢总结
同时本设计还存在着一些不足,例如:系统的硬件设计 方面有待完善,可以增加各种保护功能和故障检测功能。 还有可以用12864显示温度曲线,或者用电脑和单片机 描出图形,使得PID参数更好的调节。 通过本次毕业设计我感受很深,从中学到了很多东西。 通过本次实践,不但培养了我们独立思考问题的能力, 同时也增强了我的动手能力,为以后步入工作岗位奠定 了基础。
-
19
➢小插曲
3.以前我用单片机烧写程序的时候都是用M8下载器,这次我是用 的串口烧写,需要的条件是USB转串口驱动,和一个STC-ISP软 件,注意要调节好对应的USB口。 4.在实习的时候我看了公司的不少程序蛮有感触的,我发现他对 变量的命名很好让人看到这个变量知道这个变量的作用,方法是 下划线和大小写。还有一个是扫描程序,用定时器让一个变量自 加,就等于到了某个时间单片机会去检查某个部位,本来我是打 算用中断写这些程序的。本次毕业设计我就用上了这些学到的东 西。初次用比较生疏。
通过~(P0|oxf0)的 值知道是哪一行有
按键按下
P0=ox0f N
判断P0是否等于ox0f即判断按键是否松开 Y
返回按键
结束
Y Y 返回值为字符X
-
➢软件设计
17
➢软件设计
软件设计还有许多的小程序和一些小技巧 比如初始化程序,DS18B20的时序电路, 如何命名变量,如何程序模块化等,就在 此略过。
基于PID算法和51单片机的温 度控制系统设计
-
1
目录
研究意义 研究背景 研究内容 研究方法 硬件电路 软件设计 小插 曲 结论
-
2
➢研究意义
温度是生活及生产中最基本的物理量,它表征的 是物体的冷热程度。自然界中任何物理、化学过程 都紧密的与温度相联系。在很多生产过程中,温度 的测量和控制都直接和安全生产、提高生产效率、 保证产品质量、节约能源等重大技术指标相联系。 因此,温度的测量与控制在国民经济各个领域中均 受到了相当程度的重视。
-
20
➢小插曲
5.矩阵键盘这块焊接的时候倒是发了我不少时间, 以前都是看着的以为自己会。这次我真正的感受到 动手和不动手的区别。矩阵键盘的程序也让我纠结 了点时间。这里有个思维过程。首先我确定了我的 这个电路是有按键按下是高电平的IO口会被拉低, 比如说11110000会变成1011000,让P0口和 00001111继续位或运算在按位取反,就可以得到是 第二列有按键按下,在赋值00001111就可以等到行 就能确定是哪个按键按下。这里要理清硬件电路的 关系才能编程。
-
18
➢小插曲
1.困惑与PID三个参数的调节,本来我是想从纯理 论的方面去思索这个问题的后面与老师交谈了下 才知道PID的参数调节是与实际环境相关的。 2.鬼影,LCD1602出现鬼影。本来我并不知道这 个是鬼影,在网上搜索也就不知道检索什么关键 词。后面请教了公司的一个毕业不久的学长得知 是鬼影,解决方法是在VDD端和地之间串联个 10K的电位器,发现鬼影可调。
停止加热
Y
开始 温度大于目标温度
➢软件设计
最大功率加热
Y
温度是否相差2℃
计算离目标温度还差多少功 率er[2]
积分W_i[1]=Ki*er[2]
W_pid=Kp*er[2]+W_i[1]+W_i[0]+ Kd*(er[0]-2*er[1]+er[2])
er[0]=er[1] er[1]=er[2] W_i[0]=W_i[0]+W_i[1]
ห้องสมุดไป่ตู้
-
3
➢研究背景
近年来,温度的检测在理论上发展比较成熟,但 在实际测量和控制中,如何保证快速实时地对温 度进行采样,确保数据的正确传输,并能对所测 温度场进行较精确的控制,仍然是目前需要解决 的问题 。 从工业控制器的发展过程来看,温度控制技术大 致可分以下几种:定值开关温控法、PID线性温 控法、智能温控法。
停止计时
Y
扫描是否有按键按下
Y
读出按键值并存储 N
在LCD1602中显示 按键输入值
按键输入是否完整
Y
调用PID算法
N 给PWM波的高电平 的占空比赋值
开始计时
开始
开机初始化 T是否等于0.1秒
N T是否等于0.2秒
停止计时
读取DS18b20的温 度数据送LCD显示
T=0
开始计时
➢软件设计
-
15
PID算法