第20届中国青少年机器人竞赛机器人创意比赛主题与规则
第20届中国青少年机器人创意比赛主题解读

顿向明2019年12月11日提纲Ø协作机器人的含义Ø协作机器人的意义Ø协作机器人的实例Ø协作机器人的创意举例Ø本次创意比赛的潜在期望Ø总结p协作是个体或群体间为实现共同目标而相互配合完成特定任务的行为方式。
p协作机器人是具有协作工作方式的多机器人系统。
•多主体•共享目标•互操作性p协作机器人的主体可以是机器人,也可以是自然人。
p协作机器人系统中参与主体必须包含机器。
p协作的意义•提升工作效率•提升智能与适应环境的能力•提升整体的工作量或工作质量p人机协作机器人•2014年10月,博世(Bosch)推出了其首个协作机器人解决方案APASp人机协作机器人在与人的协作中安全性是重中之重协作机器人的实例2p人机协作机器人•ABB公司推出一款双臂协作型机器人,名叫YuMi。
协作机器人的实例2p人机协作机器人YuMi, 协作不是为人提供服务协作机器人的实例3p多机协同物流机器人——亚马逊仓库物流机器人协作机器人的实例3 p同质多机机器人p地空协同安保机器人•新加坡Otsaw Digital推出的世界第一款地空户外安全机器人O-R3p异质地空协同安保机器人O-R3p机器人建图任务•个体任务•多主体间的协作关系•建图结果的融合p捡药、发药协作机器人系统•人机系统•药品的识别与运送•人机之间的正反馈与负反馈12台ABB机器人抱团过圣诞:装扮圣诞树、演奏圣诞颂歌、制作圣诞特饮……•圣诞将至,浓浓的节日气息充斥着大街小巷。
听,远处传来了圣诞颂歌,是12个ABB机器人在美国奢侈品百货连锁店Bloomingdale进行的一段美轮美奂的圣诞演出。
•在第一个窗口中,4个ABB机器人协同工作,2个吊顶式ABB IRB 120机器人和两个落地式ABB IRB 120机器人,正在相互传递20个小金球,然后将小金球放置在树枝上,共同装饰着圣诞树。
•当20个小金球放置完毕后,4个“小家伙”再将这些小金球取下来,并不断重复该操作。
机器人比赛规则
一、比赛主题“勇往直前”。
所谓“狭路相逢勇者胜”,窄路相遇,无可退让,勇敢、勇猛并且有谋略者必将取得最后的胜利。
孙子兵法云:“夫战,勇气也”,在与对手竞技的过程中纵然会有艰难险阻,会有重重迷雾,只要我们有冷静的头脑,有缜密的分析,有持之以恒的精神,有面对挑战的勇气,勇往直前不退缩,那么胜利就在眼前。
让我们用我们制作的机器人勇敢地去冲破重重阻难,帮助我们战胜对手,夺取胜利。
本次比赛的主题为“勇往直前”。
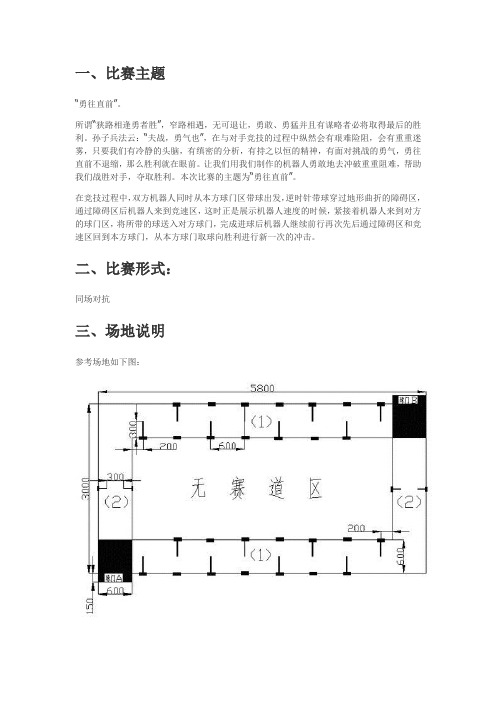
在竞技过程中,双方机器人同时从本方球门区带球出发,逆时针带球穿过地形曲折的障碍区,通过障碍区后机器人来到竞速区,这时正是展示机器人速度的时候,紧接着机器人来到对方的球门区,将所带的球送入对方球门,完成进球后机器人继续前行再次先后通过障碍区和竞速区回到本方球门,从本方球门取球向胜利进行新一次的冲击。
二、比赛形式:同场对抗三、场地说明参考场地如下图:1、比赛场地:回形场地,长5800mm,宽3000mm;左下角、右上角分别设置一球门,球门长600mm,宽150mm;场地四周围有高150mm的边界挡板,材料为:白色免漆板。
地板基本平整,表面材料为:白色免漆板。
场地地板上用黑色文字标明有各个赛区位置及名称。
2、双方球门(图中“球门A ”和“球门B”,另附球门详图如下)面积:600mm×150mm赛场左下角、右上角分别设置一球门。
球门内地面为黑色。
每个球门正中央位置设置一用于放置球的凹孔,凹孔两端分别设置一凹槽(如下图)。
比赛开始时双方各有3个球,其中双方球门内的凹孔和凹槽处各放置1球,另1球在比赛开始时直接放置在机器人前方。
机器人将球推入对方球门后,由裁判将推入球门的球摆放在球门内的凹孔或凹槽处(注:首先保证凹孔处总是有球,此方便机器人取球,但机器人不只局限于取凹孔处的球)。
3、球门区(图中涂黑区)面积:600mm×600mm球门区为机器人带球出发的地点,地面为黑色。
在比赛开始前,机器人放置在本方球门区位置,双方机器人前方各放置1球。
2020年第20届中国青少年机器人竞赛 虚拟机器人在线体验活动主题与规则(初中组)
4 任务说明
4.1 标志物及事件图标说明
3
类型
交 通 灯
名称 交通灯(红) 交通灯(黄) 交通灯(绿)
禁
止
标
志 标志物
禁止直行 禁止向右转弯 禁止向左转弯
直行
通
行
标
向右转弯
志
向左转弯
限
学校路段
制
标
志 黄实线
2
3.3 任务中止 任务仿真过程中发生以下情况,将导致当次仿真的终止: 1)超过任务限时; 2)机器人脱离道路; 3)机器人碰撞行人或其他车辆; 4)任务过程中机器人尺寸超出限制; 5)选手自主结束仿真; 任务中止后,选手可选择是否提交当次仿真的成绩。
3.4 任务相关时间 比赛时长:指比赛整个过程的时长,选手需在此时长内完成搭建机器人、编写控制程序
3)事件处理得分:在道路中会生成随机事件,如减速带、交通事故、障碍物等,机器 人需要识别道路中生成的事件,并做出相应的规避动作,将获得该事件处理得分。机器人获 得该得分后,该事件消失。
4)未按标志物行驶:机器人在道路行驶的过程中,未按标志物指示行驶, 如闯红灯、 禁止直行时仍保持直行等,会扣除相应分数。
道路施工 减速带 障碍物
行驶 前方道路有施工,机 器人需停车等待 3 秒 后绕过该施工区域继 续行驶 黄色减速带,行驶至 该路段机器人需要降 低速度至 30 以下并 继续行驶,直至通过 减速带
道路中有障碍物阻 挡,机器人需要绕开 障碍物并继续行驶
4.2 基础任务说明 1)里程点 任务描述:从起点到终点道路中,会生成十个闪烁着蓝光的里程点,用以标记机器人的
第十届中国青少年机器人竞赛

第十届中国青少年机器人竞赛机器人创意比赛主题与规则1关于机器人创意比赛机器人创意比赛是基于每年一度的中国青少年机器人竞赛的总主题与总则,组织在校中小学生机器人爱好者,花费6个月左右的时间,在课题导师或教练员的指导下,在学校、家庭、校外机器人工作室或科技实验室里,以个人或小组的方式,进行机器人的创意、设计、编程与制作,最后以具体的机器人创意作品的形式参加中国青少年机器人竞赛组委会举办的机器人竞赛活动。
机器人创意比赛对于培养学生学习与综合运用机器人技术、电子信息技术、工程技术,激发创新思维潜能,提高综合设计和制作的能力极为有益。
2主题:群星璀璨世博会一一创建美好的城市生活2.1 主题简介“成功奥运”的盛况犹在,2010年5月,黄浦江畔又将迎来“精彩世博”。
上海世博会的主题是“城市,让生活更美好”。
它将是探讨人类城市生活的盛会,是人类文明的一次精彩对话,是一部以创新和融合为主旋律的交响乐。
机器人群星在上海世博会的闪亮登场,无疑将奏响一曲辉煌乐章。
2005年爱知世博会,曾经举办过一台主题为“2023年的城市:人类与机器人共同生活”的汇展。
机器人家族或长歌善舞,或能言善辩,或可爱至极,或忠于职守,引起观众极大的兴趣,让人们领略感受了科技的力量。
今天,机器人的风头仍健,融入人类生活的步伐更快了,领域更宽了,成为城市这个有机体中极具活力和极富创新力的细胞。
我们相信,机器人在城市的多元文化融合、经济繁荣、科技创新中将更加魅力四射,群星璀璨。
2.2 课题研究机器人创意比赛的关键在于主题的演绎,大致分为三个阶段,即主题选择、内涵研究、项目落实。
本届机器人创意比赛的主题是群星璀璨世博会,副题则沿用上海世博会的主题“城市,让生活更美好”。
由此可以理解领悟出本届机器人创意比赛就是要求参赛队员以上海世博会为背景,创意出形形色色的紧扣上海世博会主题的机器人,让它们登上这个虚拟的大舞台上亮相。
内涵研究应该紧密结合“城市”、“生活”、“美好”这三个关键词破题。
第二十届中国青少年机器人竞赛 VEX 机器人工程挑战赛主题与规则

第二十届中国青少年机器人竞赛VEX机器人工程挑战赛主题与规则1 VEX机器人工程挑战赛简介VEX机器人工程挑战赛是一项引进的青少年国际机器人比赛项目。
其活动对象为中小学生,要求参加比赛的代表队自行设计、制作机器人并进行编程。
参赛的机器人既能自动程序控制,又能通过遥控器控制,并可以在特定的赛场地上,按照规则的要求进行比赛活动。
在中国青少年机器人竞赛中设置VEX机器人工程挑战赛的目的是激发我国青少年对机器人技术的兴趣,为国际VEX机器人工程挑战赛选拔参赛队。
2 比赛主题本届VEX挑战赛的主题为“积木成塔”。
“积木成塔”是一个令人兴奋和充满活力的比赛。
每场比赛包含两种不同类型控制方式——手动和自动控制。
比赛的特点是两支参赛队组成联队,每支参赛队各派出一台机器人,在赛场上完成各种任务(把方块放在高脚杯上,把方块在目标区中堆成塔状)获取尽可能高的得分。
参加“积木成塔”比赛,参赛队要开发许多新技能来应对各种面临的挑战和障碍。
有些问题需要个人来解决,还有些问题要通过与队友及指导教师的交流来处理。
参赛队员要一起构建自己的机器人参加多次比赛,与自己的队友、家人和朋友分享取得的成绩。
经过比赛,学生们不仅可以完成自己的比赛机器人,也提升了对科技和利用科技来积极影响周围世界的认识。
此外,他们还可提高素质,如研究、规划、集思广益、合作、团队精神、领导能力等。
在每场比赛中,各由两支参赛队组成的两个联队(红队和蓝队)上场竞技,获取比对方联队更高的得分。
每场比赛的时间是120秒。
3 比赛场地与环境3.1 场地的构成图1是比赛场地的俯视图。
3600mm×3600mm的比赛场地四周有高约282mm、厚25~35mm的铁质围栏。
围栏内的场地表面由发泡塑料块拼接而成,底色为灰色。
图2表示出场地上几个主要的功能区。
每支联队各有一个联队站位,是比赛时队员站立的位置;靠近联队站位的两条围栏边墙(红、蓝各一)是比赛开始前放置机器人的地方;场地四角各有一个用边条隔出来的目标区(红、蓝各一个大目标区和一个小目标区)供红、蓝联队堆放积木方块之用;纵贯场地中央的白色胶带双线是在自动时段隔开双方机器人的自动线。
918346-WER2020竞赛-RIC机器人创新挑战赛—“勇攀高峰“竞赛规则-001
RIC机器人创新挑战赛规则——勇攀高峰一、RIC机器人创新挑战赛简介RIC(Robot Innovation Challenge)机器人创新挑战赛是一项青少年机器人比赛项目。
要求参加比赛的代表队自行设计、制作机器人并进行程序设计。
参赛的机器人可在特定的竞赛场地上,按照一定的规则进行比赛。
在中小学机器人竞赛中设置RIC机器人创新挑战赛的目的是通过电脑资讯及科学原理的融合运用,启发参赛者的科技运用及创意,并以机器人设计的竞赛活动,达到推动创新科学教育的目的,激发我国青少年对机器人技术的兴趣。
二、竞赛主题为“勇攀高峰”本届机器人创新挑战赛的主题为“勇攀高峰”。
三、.参赛范围本次比赛分小学组、初中组、高中组。
四、竞赛主题与规则1 竞赛简介1.1每支队伍由两名参赛选手组成,他们需要自行拼装机器人、编写机器人程序、调试和操作机器人。
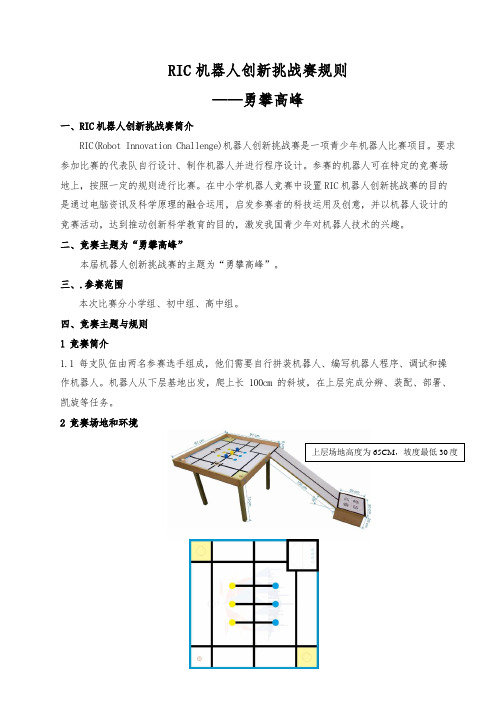
机器人从下层基地出发,爬上长 100cm 的斜坡,在上层完成分辨、装配、部署、凯旋等任务。
2 竞赛场地和环境上层场地高度为65CM,坡度最低30度图1为比赛场地示意图2.1 下层基地 30cm×30cm;上层高度为65cm,内尺寸 91cm*91cm,边框高 5cm;斜坡宽30cm,长 100cm,斜坡最低30度。
2.2 道具:圆环 2 个(直径7cm、厚1cm)、彩色圆柱 3 个(底面直径4cm、高4cm)、圆木球1个(直径4cm)、小圆环1个(直径4cm,厚0.6cm)、木八角2个(直径3cm)。
2.3 竞赛场地以现场公布为准。
3 机器人规格3.1 机器人的长和宽均不能超过 25cm,高度不限。
控制器 1 个,电机不超过 4个,传感器不超过5个,不允许采用集成类循迹卡,电池电压不超过9V。
3.2 机器人必须设计成只用一次操作(如按一个按钮或拨一个开关)就能启动。
4 任务要求:4.1 登顶:机器人从下层基地攀爬到上层基地。
4.2 凯旋:机器人在上层基地内旋转一圈以上并播放音乐2秒。
中国青少年机器人比赛主题与规则
我国青少年机器人比赛主题与规则我国青少年机器人比赛是一项旨在激发青少年对科学、技术、工程和数学的兴趣的比赛。
本次比赛旨在培养青少年的创新能力、动手能力和团队合作能力,通过参与比赛,青少年可以学到有关机器人制作和编程的知识,提升技术能力和动手能力,同时培养团队协作和竞赛意识。
1.主题本次比赛将围绕“智能机器人应用于生活与产业”展开,参赛队伍可以自行设计和制作一个能够实现特定功能的智能机器人。
比赛主题涵盖了生活、健康、环保、工业生产等多个领域,鼓励参赛队伍选择与现实生活紧密相关的问题进行解决,促进智能机器人技术在各个领域的应用。
2.参赛资格本次比赛面向全国中小学生开放,参赛者需组成3-5人的参赛队伍,队员芳龄必须在14岁至18岁之间,学校、社会团体和个人均可组队参赛。
3.比赛规则(1)机器人要求:参赛队伍需要自行设计和制作一个能够实现特定功能的智能机器人,机器人尺寸不超过1m×1m×1m,外观美观,结构稳定,材料环保。
(2)比赛形式:每个队伍将在规定时间内进行机器人操作演示,展示机器人的设计理念、制作工艺、功能特点和行为表现。
(3)评分标准:评委将按照机器人的设计创新、功能完整、性能稳定、操作灵活等标准进行评分,最终评出优胜队伍。
4.比赛流程(1)报名:参赛队伍需在规定时间内向比赛主办方报名,并提交参赛作品的设计方案及相关材料。
(2)初赛:初赛将通过视瓶展示的形式进行,参赛队伍需提交机器人操作演示视瓶,并经评委评审确定晋级队伍。
(3)复赛:复赛将会在指定地点举行,晋级队伍需携带机器人参加复赛现场操作演示。
(4)决赛:决赛将在全国范围内举行,由初赛和复赛晋级队伍组成,进行最后的角逐。
5.奖项设置本次比赛将设立一、二、三等奖以及优秀组织奖、特别奖等奖项,并颁发获奖证书和奖金,以鼓励青少年参与并在比赛中取得优异成绩。
6.总结我国青少年机器人比赛作为一个面向青少年开展的科技竞赛活动,有利于激发青少年的创新意识和动手能力,促进科学技术与教育的结合,推动智能机器人技术在青少年中的传播和应用。
青少年机器人竞赛

操控技能测试
向机器人提供不同的图像信息,测试其识 别和处理能力,如人脸识别准确率、物体 识别种类等。
设置多个操控任务,如抓取、移动、放置 等,测试机器人的机械臂操控准确性和稳 定性,记录其完成任务的时间和成功率。
问题诊断与优化方案
• 自主导航问题诊断:针对机器人在自主导航测试中出现的问题,如碰撞、路径 规划不合理等,检查机器人的传感器、算法等方面的问题,提出优化方案,如 改进传感器精度、优化路径规划算法等。
• 语音识别与交互问题诊断:针对机器人在语音识别与交互测试中出现的问题, 如识别不准确、响应速度慢等,检查机器人的语音识别模块、自然语言处理算 法等方面的问题,提出优化方案,如改进语音识别算法、提高自然语言处理模 型的准确性等。
• 图像识别与处理问题诊断:针对机器人在图像识别与处理测试中出现的问题, 如识别错误、处理速度慢等,检查机器人的图像识别算法、处理器性能等方面 的问题,提出优化方案,如改进图像识别算法、提高处理器性能等。
展示机器人的机械臂操控、 抓取、移动等技能,以及完
成特定任务的能力。
测试方法与标准
自主导航测试
语音识别与交互测试
在模拟环境中设置多个障碍物和路径,测 试机器人的避障和路径规划能力,记录其 成功率和耗时。
向机器人发出语音指令,测试其识别准确 性和响应速度,同时评估其自然语言交互 的流畅度和准确性。
图像识别与处理测试
促进创新思维
团队成员间的交流和碰撞有助于激发新的想法和创意,推动项目 的创新和发展。
培养合作精神
团队协作有助于培养青少年的合作精神,学会尊重他人、倾听他 人意见、与他人协作解决问题。
分工协作策略
明确目标与任务
在项目开始时,明确团队的目标和任务,确保每个成员都清楚自 己的职责和期望成果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二十届中国青少年机器人竞赛机器人综合技能比赛主题与规则1机器人综合技能比赛简介机器人综合技能比赛是中国青少年机器人竞赛项目之一。
其活动对象为中小学生,要求参加比赛的代表队在现场自行拼装机器人、编制机器人运行程序、调试和操作机器人。
参赛的机器人是程序控制的,可以在赛前公布的比赛场地上,按照本规则进行比赛活动。
在中国青少年机器人竞赛中设置机器人综合技能比赛的目的是检验青少年对机器人技术的理解和掌握程度,激发我国青少年对机器人技术的兴趣,培养动手、动脑的能力。
2比赛主题本届机器人综合技能比赛的主题为“垃圾分类助力环保”。
实行垃圾分类,关系广大人民群众生活环境,关系节约使用资源,也是社会文明水平的一个重要体现。
将生活垃圾分为四类:可回收物、有害垃圾、厨余垃圾、其他垃圾,对应的垃圾桶以蓝、红、绿、灰四种颜色表示。
我们应以生活垃圾分类为载体,培养一代人良好的文明习惯、公共意识和公民意识;开展青年志愿活动,鼓励和引导青少年积极参与生活垃圾分类;动员家庭积极参与,大力传播生态文明思想和理念,引导家庭成员从自身做起,自觉成为生活垃圾分类的参与者、践行者、推动者。
本届比赛通过用机器人模拟垃圾分类,加深青少年对生活垃圾分类的了解,培养青少年的创新科技探索能力,为改善生活环境作努力,为绿色发展、可持续发展作贡献。
3比赛场地与环境3.1场地图1是比赛场地的示意图,待命区的位置将在赛前发的赛题中确定。
图1 比赛场地示意3.2赛场规格与要求3.2.1 机器人比赛场内部是拼装块拼接而成。
场地四周装有白色木质围栏,栏高200mm,厚15~20mm。
为提高参赛队应变能力,正式比赛的场地会有变化,场地长度为3000~6000mm,宽度2000~4000mm;基础拼装块为用厚15~20mm、长500mm、宽500mm的木工板,有可能进行100%-200%的等比例放大,场地道具尺寸不变,淡蓝色的8块拼装块可换。
第4节中所述的机器人要完成的任务一般分布在场地周围的固定拼装块上。
3.2.2 两种拼装块刷白色亚光漆,用黑色亚光漆画出(或用黑色胶纸粘贴)宽度为20~25mm的引导线;以下凡是涉及黑线的尺寸,均指其中心线。
固定拼装块上的引导线是连接对边中点的直线。
可换拼装块的图形在赛前公布。
3.2.3 每个固定拼装块被黑色引导线分为东北、东南、西南、西北四个分区。
3.2.4 场上有一块长500mm、宽500mm刷白色亚光漆的锥台,是机器人的待命区,如图2所示。
机器人要从待命区启动,完成任务后还要回到待命区。
锥台上虽画有黑色引导线,但机器人可以从任何一边上下。
图2 锥台尺寸(mm)3.2.5 在黑色引导线的十字或丁字交叉处,可能会出现50mm×50mm的深蓝色转弯标志。
机器人在遇到转弯标志时的正确动作方式如图3所示。
图3 转弯标志及允许的出路口行驶方向3.2.6 往届机器人竞赛中所用的部分可换拼装块的图形可能沿用,但也会有一些新的图形。
有些可换拼装块上可能有6mm高的突起、坡度约12°的坡道、宽320mm高320mm的涵洞,也可能会出现没有引导线的空白或者有彩色图案的拼装块,等等。
3.2.7 比赛场地尺寸的允许误差是±5mm,拼装块尺寸的允许误差是–3mm,对此,参赛队设计机器人时必须充分考虑。
3.2.8 拼装的场地尽可能平整,但接缝处可能有2mm的高低差和2mm的间隙。
3.2.9 待命区、转弯标志的位置、非十字引导线拼装块的图形以及位置和方向,等等,在赛前准备时公布。
场地一经公布,在该组别的整个比赛过程中不再变化。
3.3赛场环境机器人比赛场地环境为冷光源、低照度、无磁场干扰。
但由于一般赛场环境的不确定因素较多,例如,场地表面可能有纹路和不平整,边框上有裂缝,光照条件有变化等等。
参赛队在设计机器人时应考虑各种应对措施。
4可能的机器人任务及得分以下描述任务不一定同时出现在比赛场地上。
这些任务也只是对生活中的某些情景的模拟,切勿将它们与真实生活相比。
4.1 开始行动4.1.1 比赛开始前,机器人上预装有1个“环卫工人”模型,模型如图4所示。
4.1.2 机器人要把1名“环卫工人”,送到某个固定拼装块上的规定分区内,运送过程中,“环卫工人”可以与地面接触。
到规定分区后,“环卫工人”模型不能压住黑色引导线。
4.1.3 将“环卫工人”送到规定分区且直立的“环卫工人”记60分,送到但模型倒下扣10分,“环卫工人”模型压住黑色引导线扣10分,机器人完全脱离该任务拼装块后裁判员记分。
4.1.4 获得50分就算完成“开始行动”任务。
图4 环卫工人模型4.2全城动员4.2.1 机器人沿黑色引导线从非十字线拼装块的一口进入,从另一口出去,如果遇到转弯标志,应按3.2.5的规定通过。
完成全城动员任务可与其它任务混合完成,不需要是连续的。
在全城动员过程中也可以通过十字线拼装块。
如果不指定全城动员任务,通过所有非十字线拼装块和转弯标志均不记分。
4.2.2通过一个非十字拼装块记8分,通过一个转弯标志记5分,通过转弯标志不正确扣3分。
4.2.3 在全城动员任务中获得50分就算完成了任务。
4.3道路清理4.3.1 尚待移除的“杂物”用去掉标签(或在罐外包一层铝箔)的标准355ml易拉罐表示,向上直立。
罐中装黄沙(不能采用液体),使重量达到500g。
“杂物”被布置在黑色引导线或它们的交叉点上,具体位置另定。
4.3.2 移除“杂物”的标准是把它移动到不再与黑色引导线接触的地方,且不得超出该任务拼装块,机器人完全脱离该任务拼装块,裁判员记分。
在完成此任务期间,除完成“全城动员”任务外,不得穿插其它任务,一旦插入其它任务,本任务即告结束,但已有的得分有效。
4.3.3 机器人每成功移除一个“杂物”计10分。
全部移除,加计20分。
4.3.4 获得50分就算完成“道路清理”任务。
4.4 竖立标志4.4.1 一个印有垃圾分类图案的标志牌(如图5所示),标志牌为80mm×50mm×30mm的长方体,平放在某个固定拼装块上,要求机器人将其直立起来(标志最长的方向垂直于地面),不得超出原有拼装块,且不得压住引导线。
图5 垃圾分类标志4.4.2标志直立记60分,标志超出原有拼装块扣10分,标志颠倒扣10分。
机器人完全脱离该任务拼装块后裁判员记分。
4.4.3 得到50分即为完成“竖立标志”任务。
4.5垃圾分拣(1)4.5.1 在某一个十字拼装块上堆放着4个边长均为20mm的立方体代表不同“垃圾”,其中2个绿色立方体代表“厨余垃圾”,2个灰色立方体代表“其他垃圾”,这4个立方体彼此之间没有粘接。
不同颜色立方体的位置是随机的,可能的摆放方式如图6所示。
机器人行驶到该拼装块内,将尽可能多的立方体装入到机器人上,使得这些立方体与地面不再接触,并将这些立方体运送到对应颜色的垃圾桶内。
垃圾桶模型如图7所示,垃圾桶颜色分为四种,分别为:“可回收物”(蓝色)、“有害垃圾”(红色)、“厨余垃圾”(绿色)、“其他垃圾”(灰色),机器人可多次进出任务拼装块进行分拣,但不能穿插除“全城动员”外的其它任务,机器人最后一次完全脱离该任务拼装块裁判员记分。
4.5.2 分拣所用的垃圾桶尺寸如图8所示,垃圾桶尺寸为120mm×120mm×60mm,两个垃圾桶的位置由赛题公布。
4.5.3正确分拣一个立方体到对应垃圾桶记20分。
错误放置一个立方体扣20分。
4.5.4获得50分就算完成“垃圾分拣(1)”任务。
图6 立方体的堆放方式图7 垃圾桶模型图8 垃圾桶模型尺寸4.6垃圾分拣(2)4.6.1 在某一个十字拼装块上堆放着4-8个边长均为20mm 的立方体代表不同“垃圾”,其中红色立方体代表“有害垃圾”;蓝色立方体代表“可回收物”。
不同颜色立方体的位置和摆放方式随机,图9所示仅为其中一种摆放方式。
机器人行驶到该拼装块内,将尽可能多的立方体装入到机器人上,使得这些立方体与地面不再接触,并将这些立方体运送到对应的垃圾桶内,机器人可多次进出任务拼装块进行分拣,但不能穿插除“全城动员”外的其它任务,机器人最后一次完全脱离该任务拼装块裁判员记分。
4.6.2 分拣所用的垃圾桶尺寸如图8所示,垃圾桶尺寸为120mm×120mm×60mm,两个垃圾桶的位置由赛题公布。
4.6.3正确分拣一个立方体到对应垃圾桶记20分。
错误放置一个立方体扣20分。
4.6.4获得50分就算完成“垃圾分拣(2)”任务。
图9 立方体的堆放方式4.7神秘任务神秘任务的具体要求由比赛现场赛题给出,要求参赛机器人能够实现基本的巡线、抓取、放置、声光指示、颜色识别等功能。
4.8返回4.8.1 “返回”必须是最后一个完成的比赛任务。
4.8.2 “返回”的标准是机器人登上锥台并不再运动,且与锥台以外的任何表面(含围栏表面)没有接触。
机器人完成任务过程中通过待命区和重试时机器人回到待命区不属于完成“返回”任务。
4.8.3 按要求完成“返回”任务可获得50分。
5 机器人本节提供设计和构建机器人的原则和要求。
参赛前,所有机器人必须通过检查。
参加机器人综合技能比赛的机器人限用竞赛组委会指定的机器人套材。
只要有可能,也允许套材的混合使用。
5.1 每支参赛队只能使用一台按程序运行的机器人。
5.2 在待命区内,机器人外形最大尺寸不得超过长250mm、宽250mm、高300mm。
在比赛开始后,机器人可以变形超出此尺寸限制。
5.3 机器人上必须展示参赛队编号。
在不影响正常比赛的基础上,机器人可进行个性化的装饰,以增强其表现力和容易被识别。
5.4 每台机器人所用的控制器、电机、传感器及其它结构件,数量不限。
但机器人的控制器、电机、传感器必须是独立的模块。
机器人的重量不得超过3kg。
5.5 机器人上的所有零部件必须可靠固定,不允许分离或脱落在场地上。
5.6 为了安全,机器人所使用的直流电源电压不得超过12V。
5.7 不允许使用有可能损坏比赛场地的危险元件。
5.8 机器人必须设计成只用一次操作(如,按一个按钮或拨一个开关)就能启动。
5.9 机器人必须能原地旋转,旋转的次数可控。
机器人还应在明显位置装一个可见光LED(颜色不限),它的开/关应可控。
5.10 参赛队不得使用遥控调试并记录数据的方式完成编程。
6比赛6.1参赛队6.1.1 每支参赛队应由2名学生和1名教练员(教师或学生)组成。
学生必须是2020年6月前在学校注册的在读学生。
6.1.2 参赛队员应以积极的心态面对和自主地处理在比赛中遇到的所有问题,自尊、自重,友善地对待和尊重队友、对手、志愿者、裁判员和所有为比赛付出辛劳的人,努力把自己培养成为有健全人格和健康心理的人。
6.2 赛制6.2.1 机器人综合技能比赛按小学、初中、高中三个组别分别进行。