伺服驱动器硬件设计
睿能 RS3E 伺服驱动器 硬件手册

前言手册简介首先感谢您对睿能伺服的支持!RS3E系列伺服是睿能自主研发的高性价比中小功率的交流伺服产品,该系列产品功率范围为0~3kW 支持EtherCAT通讯协议,上位机可通过对应的通讯接口实现多台驱动器联网运行,提供了惯量辨识、自动增益调整等功能,使驱动器简单易用。
同时具备动态制动,在设备故障、急停、电源断电等各种工况下,通过制动电阻能耗实现电机制动,缩短伺服电机的机械进给。
配合睿能自主研发MC2/MA3系列伺服电机在电子制造、机械手、包装、机床等行业的自动化设备中以高性价比的方案实现快速精确的位置控制、速度控制、转矩控制。
本手册介绍RS3E的产品信息、安装、配线等。
相关资料名称版本内容RS3P系列伺服调试手册V1.0伺服报警故障代码说明书V1.0版本记录日期版本变更内容2022年10月V1.0 第一版发行版权声明睿能科技股份有限公司保留所有权利,未经本公司许可,不得以任何形式方式复制或传播本手册任何部分。
免责声明本产品文件在发布时是准确可靠的,睿能科技股份有限公司保留在不另行通知的情况下更改本手册中描述的权利。
联系信息睿能科技股份有限公司地址:福建省福州市鼓楼区软件大道89号软件园C区26号电话:*************传真:*************邮编:350003关于手册本手册不附在产品包装箱内,如需要获取电子版PDF文件,通过睿能科技官网()下载。
如果您需要咨询或相关帮助,请与本公司取得联系。
此页预留目录前言 (2)目录 (4)安全注意事项 (6)1 产品信息 (10)1.1命名规则 (10)1.2铭牌 (10)1.3部件说明 (11)1.3.1S IZE A (11)1.3.2S IZE B (12)1.3.3S IZE C (13)1.3.4S IZE D (14)1.4规格 (15)1.4.1电气规格 (15)1.4.2基本规格 (16)1.4.3外形尺寸 (17)2 安装 (19)2.1安装须知 (19)2.2安装环境条件 (20)2.3安装空间要求 (20)2.4电池盒安装和拆卸 (21)3 接线 (22)3.1注意事项 (22)3.2系统接线图 (24)3.3电气接线图 (27)3.3.1总线指令输入 (27)4 端子定义 (28)4.1USB连接器 (28)4.2CN4/CN5 (28)4.3CN1I/O连接器 (29)4.3.1端子说明 (29)4.3.2数字量输入 (30)4.3.3数字量输出 (32)4.4CN2编码器连接器 (32)5 抗干扰对策 (33)5.1抗干扰对策链接实例 (34)安全注意事项安全声明◆本章对正确使用本产品所需关注的安全注意事项进行说明。
基于ARM+FPGA的数字交流伺服驱动器设计
Design of Digital AC Servo Driver Based on ARM and FPGA ZHI Menghui1,2,YIN Quan1,LÜ Songlei2,HUA Qiang2
Abstract: To alleviate the problems of large dispersion,high zero drift and low reliability of analog servo driver,a design scheme of high-performance digital AC servo driver was proposed. In the scheme,the hardware architecture of ARM and FPGA was adopted based on the traditional analog servo driver,and the function and control algorithm of the novel driver were designed combined with the idea of centralized control modularization. This scheme can not only exploit the advantages of digital control in control accuracy and control method to the full,but also ensure the stability of servo driver. The test results show that the AC servo driver based on ARM and FPGA has the characteristics of fast dynamic response,high reliability,good real-time performance and strong anti-interference ability.
伺服驱动器硬件设计
伺服驱动器的硬件设计永磁同步电机伺服驱动器的硬件由控制部分和功率部分组成,控制电路以ARM为控制核心,包括编码器接口电路、外围接口电路等等。
控制电路实现以下功能:获得相关指令信号和反馈信号,运行矢量控制算法,生成用于控功率模块的PWM信号。
功率电路包括整流电路、逆变电路、能耗制动电路、电流采样电路、功率模块及其驱动电路、辅助电源等,用以实现能量的交流-直流-交流形式变换,驱动电机实现对电机力矩、速度、位置的精确控制。
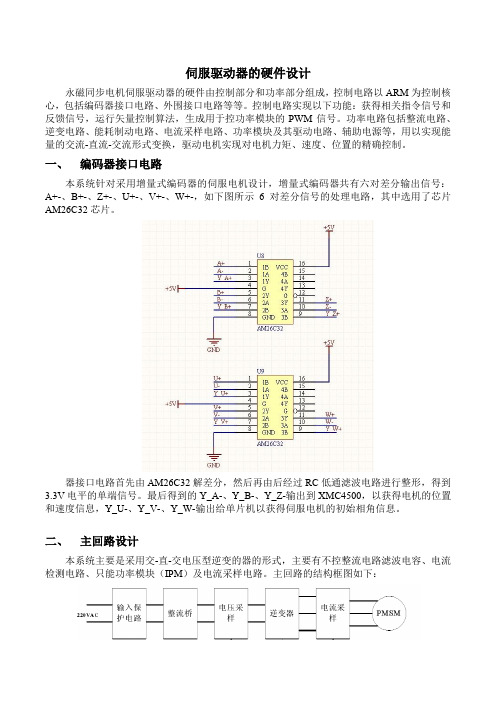
一、编码器接口电路本系统针对采用增量式编码器的伺服电机设计,增量式编码器共有六对差分输出信号:A+-、B+-、Z+-、U+-、V+-、W+-,如下图所示6对差分信号的处理电路,其中选用了芯片AM26C32芯片。
器接口电路首先由AM26C32解差分,然后再由后经过RC低通滤波电路进行整形,得到3.3V电平的单端信号。
最后得到的Y_A-、Y_B-、Y_Z-输出到XMC4500,以获得电机的位置和速度信息,Y_U-、Y_V-、Y_W-输出给单片机以获得伺服电机的初始相角信息。
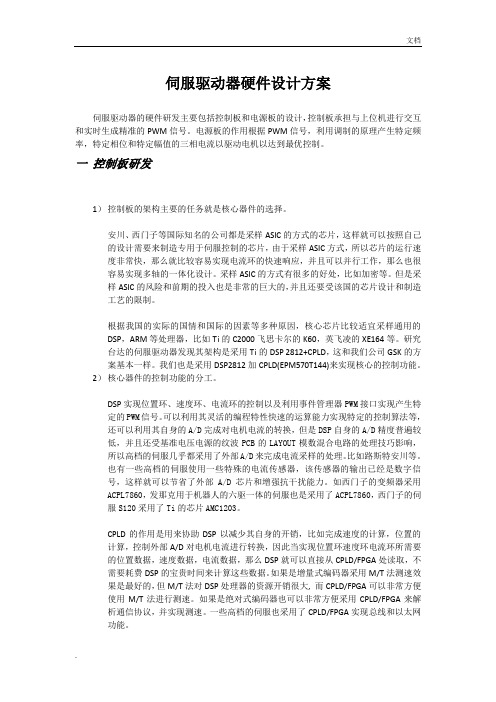
二、主回路设计本系统主要是采用交-直-交电压型逆变的器的形式,主要有不控整流电路滤波电容、电流检测电路、只能功率模块(IPM)及电流采样电路。
主回路的结构框图如下:(一)整流电路设计本系统采用的是电容滤波的单相不可控整流电路,这部分电路由输入保护电路、整流桥如下图所示:主回路侧有220V交流进来先接一个2A断路器,以防止过电流,起到保护作用。
然后安规电容增加3个安全电容来抑制EMI传导干扰。
交流电源输入分为3个端子:火线(L)/零线(N)/地线(G)。
在火线和地线之间以及在零线和地线之间并接的电容,一般统称为Y电容。
这两个Y电容连接的位置比较关键,必须需要符合相关安全标准,以防引起电子设备漏电或机壳带电,容易危及人身安全及生命。
它们都属于安全电容,从而要求电容值不能偏大,而耐压必须较高,Y电容的取值为4700PF。
在火线和零线抑制之间并联的电容,一般称之为X 电容。
伺服驱动器硬件设计方案
伺服驱动器硬件设计方案伺服驱动器的硬件研发主要包括控制板和电源板的设计,控制板承担与上位机进行交互和实时生成精准的PWM信号。
电源板的作用根据PWM信号,利用调制的原理产生特定频率,特定相位和特定幅值的三相电流以驱动电机以达到最优控制。
一控制板研发1)控制板的架构主要的任务就是核心器件的选择。
安川、西门子等国际知名的公司都是采样ASIC的方式的芯片,这样就可以按照自己的设计需要来制造专用于伺服控制的芯片,由于采样ASIC方式,所以芯片的运行速度非常快,那么就比较容易实现电流环的快速响应,并且可以并行工作,那么也很容易实现多轴的一体化设计。
采样ASIC的方式有很多的好处,比如加密等。
但是采样ASIC的风险和前期的投入也是非常的巨大的,并且还要受该国的芯片设计和制造工艺的限制。
根据我国的实际的国情和国际的因素等多种原因,核心芯片比较适宜采样通用的DSP,ARM等处理器,比如Ti的C2000飞思卡尔的K60,英飞凌的XE164等。
研究台达的伺服驱动器发现其架构是采用Ti的DSP 2812+CPLD,这和我们公司GSK的方案基本一样。
我们也是采用DSP2812加CPLD(EPM570T144)来实现核心的控制功能。
2)核心器件的控制功能的分工。
DSP实现位置环、速度环、电流环的控制以及利用事件管理器PWM接口实现产生特定的PWM信号。
可以利用其灵活的编程特性快速的运算能力实现特定的控制算法等,还可以利用其自身的A/D完成对电机电流的转换,但是DSP自身的A/D精度普遍较低,并且还受基准电压电源的纹波PCB的LAYOUT模数混合电路的处理技巧影响,所以高档的伺服几乎都采用了外部A/D来完成电流采样的处理。
比如路斯特安川等。
也有一些高档的伺服使用一些特殊的电流传感器,该传感器的输出已经是数字信号,这样就可以节省了外部A/D芯片和增强抗干扰能力。
如西门子的变频器采用ACPL7860,发那克用于机器人的六驱一体的伺服也是采用了ACPL7860,西门子的伺服S120采用了Ti的芯片AMC1203。
伺服系统设计步骤及方法

伺服系统设计步骤及方法伺服系统是指一种能够控制运动精度和位置的系统,常见于工业自动化、机器人、汽车等领域。
伺服系统设计的主要目标是提高系统的稳定性、响应速度和控制精度。
在设计伺服系统时,需要按照一定的步骤和方法进行,以确保系统能够满足要求。
下面是伺服系统设计的一般步骤及方法:1.定义系统需求:首先确定伺服系统的工作环境、运动要求和性能指标。
例如,确定系统需要在何种速度、加速度和精度下运动,以及要控制的负载和环境条件等。
2.选择伺服驱动器和电机:根据系统的需求,选择合适的伺服驱动器和电机。
此步骤需要考虑到系统的负载特性、控制精度、电源电压和电流等。
通常,选择驱动器时需要考虑其速度和定位控制的能力,选择电机时需要考虑其功率、转矩和惯性等。
3.确定控制方式:根据系统需求,确定使用的控制方式,包括位置控制、速度控制和力控制等。
对于不同的应用场景,选择合适的控制方式可以提高系统的控制效果和稳定性。
4.设计控制算法:根据系统需求和控制方式,设计控制算法。
常用的控制算法包括PID控制、滑模控制和模糊控制等。
控制算法的目标是根据系统的输入和输出,以最优的方式控制电机的速度和位置。
5.选择传感器和反馈装置:为了实现对伺服系统的准确控制,通常需要选择合适的传感器和反馈装置,用于测量和反馈系统的位置、速度和加速度信息。
常用的传感器包括编码器、光电开关和位移传感器等。
6.确定反馈控制回路:根据系统需求和传感器的信息,确定系统的反馈控制回路。
反馈控制回路可以根据测量值对系统进行修正和调整,以实现更精确的控制。
同时,反馈控制还可以稳定系统的工作状态,并减小由于负载变化和环境干扰引起的系统波动。
7.运动规划和轨迹生成:根据系统的运动需求和控制算法,进行运动规划和轨迹生成。
运动规划是指通过规划器生成一条供伺服驱动器执行的运动轨迹。
轨迹生成是指将运动规划生成的轨迹转化为伺服驱动器可以执行的轨迹。
8.系统调试和优化:完成系统的硬件搭建和软件编程后,进行系统调试和优化工作。
直流伺服系统设计

02 直流伺服系统设计基础
CHAPTER
电机选择
根据系统需求选择合适的电机 类型,如无刷直流电机、有刷 直流电机等。
考虑电机的扭矩、转速、尺寸 和重量等参数,以确保电机能 够满足系统性能要求。
考虑电机的效率和温升,以降 低能耗和提高系统稳定性。
驱动器设计
根据电机类型和系统需求,设计合适的驱动器电路,包括电源、控制信号、保护电 路等。
工作原理
控制器
控制器是直流伺服系统的核心部 分,负责接收指令信号,并与电 机反馈信号进行比较,根据比较
结果输出控制信号。
电机
直流电机是系统的执行元件,根据 控制信号调整电机的输入电流或电 压,从而实现精确的运动控制。
反馈装置
为了实现精确控制,直流伺服系统 ቤተ መጻሕፍቲ ባይዱ常配备位置、速度或力矩传感器 等反馈装置,将实际运动状态反馈 给控制器。
霍尔编码器
霍尔编码器也具有较高的测量精度和可靠性,适用于对测量精度 要求较高的应用。
磁编码器
磁编码器利用磁场变化来测量转速和位置,具有较小的体积和较 高的测量精度。
控制器
1 2
微控制器
微控制器是伺服控制系统的核心,负责接收输入 信号、计算输出信号并控制伺服系统的运行。
数字信号处理器
数字信号处理器具有较高的计算能力和数据处理 能力,适用于对计算能力要求较高的应用。
3
可编程逻辑控制器
可编程逻辑控制器适用于需要自动化控制和逻辑 运算的应用,具有较好的可靠性和稳定性。
驱动器
晶体管驱动器
晶体管驱动器利用晶体管的开关特性 来控制电流的通断,具有较快的响应 速度和较大的输出电流。
继电器驱动器
继电器驱动器利用继电器的触点开关 来控制电流的通断,适用于对输出电 流要求较低的应用。
伺服驱动系统设计方案

伺服驱动系统设计方案伺服电机的原理:伺服的基本概念是准确、精确、快速定位。
与普通电机一样,交流伺服电机也由定子和转子构成。
定子上有两个绕组,即励磁绕组和控制绕组,两个绕组在空间相差90°电角度。
伺服电机内部的转子是永磁铁,驱动控制的u/V/W三相电形成电磁场转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
伺服电机的精度决定于编码器的精度{线数)。
伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。
其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降作用:伺服电机,可使控制速度,位置精度非常准确。
交流伺服电机的工作原理和单相感应电动机无本质上的差异。
但是,交流伺服电机必须具备一个性能,就是能克服交流伺服电机的所谓“自转”现象,即无控制信号时,它不应转动,特别是当它已在转动时,如果控制信号消失,它应能立即停止转动。
而普通的感应电动机转动起来以后,如控制信号消失,往往仍在继续转动。
交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点:1、起动转矩大由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。
它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。
因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。
图3 伺服电动机的转矩特性2、运行范围较宽如图3所示,较差率S在0到1的范围内伺服电动机都能稳定运转。
3、无自转现象正常运转的伺服电动机,只要失去控制电压,电机立即停止运转。
当伺服电动机失去控制电压后,它处于单相运行状态,由于转子电阻大,定子中两个相反方向旋转的旋转磁场与转子作用所产生的两个转矩特性(T1-S1、T2-S2曲线)以及合成转矩特性(T-S曲线)如图4所示,与普通的单相异步电动机的转矩特性(图中T′-S曲线)不同。
伺服驱动系统设计方案及对策

伺服驱动系统设计方案及对策一、硬件设计方案及对策:1.选用高性能的伺服电机和驱动器:根据具体需要选择适合的伺服电机和驱动器,确保其具备足够的功率和控制精度。
在选择过程中,需要对驱动器的技术参数进行充分了解,并评估其适用性和可靠性。
2.采用合适的编码器:编码器用于测量电机的位置和速度,对伺服驱动系统的控制精度至关重要。
选择合适的编码器,能够提供高分辨率和高精度的反馈数据,并且具备良好的抗干扰性能。
3.电源设计:伺服驱动系统对电源质量和稳定性要求较高,需要提供稳定的电源供应和电磁兼容性设计,避免电源波动对系统性能的影响。
4.散热设计:伺服电机和驱动器在运行时会产生较大的热量,必须进行有效的散热设计,以确保系统的稳定性和可靠性。
可采用风扇散热、散热片等方式来降低温度。
5.机械设计:在伺服驱动系统中,机械结构的设计对系统性能有很大影响。
需要针对具体应用场景选择合适的传动方式和结构设计,考虑到负载、速度、精度等因素。
6.停电保护设计:为了避免突发停电导致系统损坏,可以设计备用电池或超级电容器等储能装置,以保证在停电短时间内继续工作并正常停机。
二、软件设计方案及对策:1.控制算法设计:通过对伺服电机的位置、速度和加速度等参数进行精细控制,实现对运动轨迹的准确控制。
设计合理的控制算法,能够提高系统的控制精度和稳定性。
2.运动控制软件设计:根据伺服驱动系统的应用需求,设计合理的运动控制软件,包括运动插补算法、软件调速、位置校正等功能。
3.通信接口设计:伺服驱动系统通常需要与上位机或其他设备进行通信,需要设计合适的通信接口,以实现数据传输和控制。
4.用户界面设计:为了方便用户操作和监测系统运行状态,可以设计友好的用户界面,包括参数设置、故障诊断、实时监控等功能。
5.系统诊断与故障检测设计:通过设计合理的系统诊断和故障检测功能,可以检测和排除系统故障,提高系统的可靠性和稳定性。
三、通信网络设计方案及对策:1.选择适当的通信协议:根据伺服驱动系统所处的应用环境和通信要求,选择适当的通信协议,如CAN总线、以太网等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服驱动器的硬件设计
永磁同步电机伺服驱动器的硬件由控制部分和功率部分组成,控制电路以ARM为控制核心,包括编码器接口电路、外围接口电路等等。
控制电路实现以下功能:获得相关指令信号和反馈信号,运行矢量控制算法,生成用于控功率模块的PWM信号。
功率电路包括整流电路、逆变电路、能耗制动电路、电流采样电路、功率模块及其驱动电路、辅助电源等,用以实现能量的交流-直流-交流形式变换,驱动电机实现对电机力矩、速度、位置的精确控制。
一、编码器接口电路
本系统针对采用增量式编码器的伺服电机设计,增量式编码器共有六对差分输出信号:A+-、B+-、Z+-、U+-、V+-、W+-,如下图所示6对差分信号的处理电路,其中选用了芯片AM26C32芯片。
器接口电路首先由AM26C32解差分,然后再由后经过RC低通滤波电路进行整形,得到3.3V电平的单端信号。
最后得到的Y_A-、Y_B-、Y_Z-输出到XMC4500,以获得电机的位置和速度信息,Y_U-、Y_V-、Y_W-输出给单片机以获得伺服电机的初始相角信息。
二、主回路设计
本系统主要是采用交-直-交电压型逆变的器的形式,主要有不控整流电路滤波电容、电流检测电路、只能功率模块(IPM)及电流采样电路。
主回路的结构框图如下:
(一)整流电路设计
本系统采用的是电容滤波的单相不可控整流电路,这部分电路由输入保护电路、整流桥如下图所示:
主回路侧有220V交流进来先接一个2A断路器,以防止过电流,起到保护作用。
然后安规电容增加3个安全电容来抑制EMI传导干扰。
交流电源输入分为3个端子:火线(L)/零线(N)/地线(G)。
在火线和地线之间以及在零线和地线之间并接的电容,一般统称为Y电容。
这两个Y电容连接的位置比较关键,必须需要符合相关安全标准,以防引起电子设备漏电或机壳带电,容易危及人身安全及生命。
它们都属于安全电容,从而要求电容值不能偏大,而耐压必须较高,Y电容的取值为4700PF。
在火线和零线抑制之间并联的电容,一般称之为X 电容。
由于这个电容连接的位置也比较关键,同样需要符合相关安全标准。
X电容同样也属于安全电容之一。
根据实际需要,X电容的容值允许比Y电容的容值大,但此时必须在X电容的两端并联一个安全电阻,用于防止电源线拔插时,由于该电容的充放电过程而致电源线插头长时间带电。
选X2电容,电容值为0.47uF.
(二)储能稳压及滤波电路
(三)功率模块及其驱动和保护电路
三、辅助电源设计。