两种TDOA定位算法在水声被动定位下的精度分析
采用两种被动定位法的声纳浮标接收器基阵设计
形 基 阵 提 高 目标 定 位 精 度 。
现 代 海 战 的 重 要 样 式 之 一 。 在 反 潜 作 战 中 , 基 本 的 要 求 就 是 能 够 及 时 对 潜 艇 进 最 行 搜 索 、 发 现 、 跟 踪 , 至 消 灭 。 用 于 完 成 直 这 一 任 务 的 观 察 器 材 很 多 , 雷 达 、光 电 l和 0 2, 根 据 三 角 关 系 , 目标 S的 坐 标 公 如 设备 、声 纳 、 声 纳浮 标 、磁 探 仪 等 等 。其 式 为 : 中 , 纳 浮 标 是 一 种 效 果 好 、 受 地 域 限 制 声 一 + 小 、 使 用 方 便 的 探 潜 设 备 , 受 各 国 军 方 备
其 中 d是 两 个 阵 元 之 间 的 距 离 。 单 站 纯 方 位 被 动 定 位 方 法 需 要 解 决 的 关 键 问 题
是 目 标 的 方 位 信 息 , 可 以 利 用 水 下 目 标 测 向 方 法 进 行 解 决 。 目 前 通 常 采 用 矢 量 水 听 器 测 量 声 压 和 振 速 , 进 行 水 下 目 标 的 定 向
・
数 字技 术 ・
采用两种被 动定位法的声纳浮标接收器基 阵设计
瞿 东 辉 谢 彦 宏
( 0 5部队教研 部 辽 宁 葫 芦 岛 1 5 01 91 6 20 )
【 摘 要 】 矢 量 水 听 器 的 三 元 纯 方 位 被 动 定 位 和 测 时 差 被 动 定 位 两 种 方 法 为 基 础 , 针 对 算 法 特 点 和 声 纳 浮 标 的 使 用 特 点 , 分 别 设 以 计 了两种 方法 所 采 用 的 水 下换 能 器 基 阵 结 构 两 种 基 阵 结 构相 似 ,部 分 重 合 ,可 根 据 实 际 工作 条 件 任 意选 择 算 法 ,也 可两 种 算 法 相 互 间 自行 切 换 。此 种 相 互 补 偿 的 设 计 可 以提 高 水 下 目标 被 动 定 位 的 精 度 和 可 靠 性 。 【 关键词 】 声纳浮 标 被 动定位 纯方 位 测时差 [ 中图分 类号] 9 5 E 2 【 文献标识码】 A 【 文章编 号】0 7 4 6 ( 0 0 4 0 2 — 2 1 0 -9 1 2 1 )0 — 0 6 0
水声被动定位技术及其发展趋势

水声被动定位技术及其发展趋势水声被动定位技术是利用水声信号在水中传播的特性来实现目标的定位和跟踪的一种技术。
该技术主要基于接收到的来自目标发出的声波信号、水声信道的特性以及接收器间的相对位置来确定目标的位置。
被动定位系统不需要目标进行任何操作,它可以在目标感知不到的情况下对目标进行定位。
水声被动定位技术可以应用于海洋资源勘探、军事侦察、海上安全监测等众多领域。
随着科技的发展,水声被动定位技术也在不断地发展和完善。
第一代水声被动定位技术主要依赖声目标发射的信号,通过测量信号的到达时间和方位角度,得到目标位置信息。
这种技术缺点是只能定位单个目标,定位精度受到信号质量和环境噪声的影响较大。
第二代水声被动定位技术是基于多传感器的概念,多个接收器同时接收到来自空间中多个目标的信号,通过分析信号的相位差、信号强度差等信息来定位多个目标。
这种技术可以有效地提高定位精度和目标跟踪能力,但是需要更加复杂的算法和数据处理能力。
第三代水声被动定位技术又称“自适应”水声被动定位技术,主要应用于复杂电磁环境中。
自适应算法可以根据环境信噪比和目标信号特征来调整各传感器的参数和权重,以提高定位精度和抑制环境噪声。
自适应技术还引入了目标信号的自动识别和跟踪功能,大大提高了系统的自动化程度。
未来,水声被动定位技术将面临新的挑战和机遇。
随着深海勘探的发展,需要更加精确的水声定位技术来支持深海遥控设备的操作;水下自主机器人的大规模应用也需要更加高效的目标自动识别和跟踪算法。
同时,随着水声通信技术的不断发展,水声被动定位技术也可以结合水声通信技术来实现更加智能化的水下传感器网络。
因此,水声被动定位技术在水下大数据应用、远程控制和水下通信等方面也将会得到更加广泛的应用和研究。
分布式基元水声目标被动定位方法研究
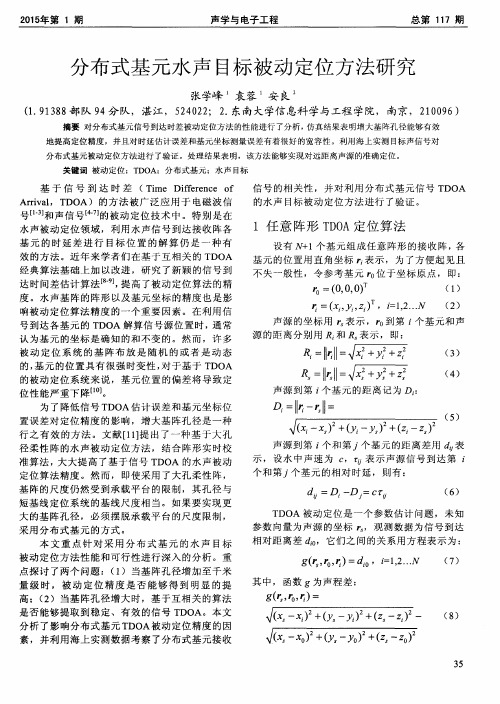
T DO A 被 动 定位 是 一个 参 数 估 计 问题 , 未 知 参 数 向量 为声 源 的 坐 标 , 观 测 数 据 为 信 号 到 达
相 对 距 离 差 0 , 它 们 之 间 的关 系 用 方 程 表 示 为 :
摘要 对 分布式基元信号到达 时差被 动定位方法 的性 能进 行了分析 , 仿真结果表 明增大 基阵孔径能够有效 地提 高定位 精度 ,并且对 时延估计误差和基 元坐标测量 误差有着很好 的宽容性 。利用海 上实测 目标声信 号对 分布式 基元 被动定位方法进行 了验证 。处理结果表 明,该方 法能够实现对远距 离声源的准确定位 。
径 柔 性 阵 的 水 声 被 动 定 位 方 法 ,结 合 阵 形 实 时 校
声源到第 i 个 基 元 的距 离 记 为 D :
㈣
√ ( 一 ) + ( Y f 一 ) + ( z 一 )
声源 到第 f 个和第 J个基元 的距离差用 由表
示 ,设 水 中声 速 为 C ,v i i 表 示声源信号到达第 j 个 和第 个 基 元 的相 对 时 延 ,则 有 :
1任 意 阵 形 T D O A定 位 算 法
设 有 Ⅳ+ 1个 基 元 组 成 任 意 阵形 的接 收 阵 ,各 基 元 的位 置 用 直 角 坐 标 , . , 表 示 ,为 了方 便 起 见 且 不 失 一 般 性 ,令 参 考 基 元 , . 0 位 于坐 标 原 点 ,即 :
=
经 典算 法 基 础 上 加 以改 进 ,研 究 了新 颖 的 信 号 到 达 时间差估计算法【 8 】 , 提 高 了被 动 定位 算 法 的精 度 。水 声 基 阵 的阵 形 以及 基 元 坐 标 的精 度 也 是 影 响被 动 定 位 算 法 精 度 的 一 个 重 要 因素 。 在 利 用 信
两种TDOA定位算法在水声被动定位下的精度分析
两种TDOA定位算法在水声被动定位下的精度分析
焦小涛;李建昌;门丽娟
【期刊名称】《电声技术》
【年(卷),期】2013(037)001
【摘要】介绍了TDOA的两种算法:Chan算法和Taylor算法,并针对Taylor算法的缺点,引入一种改进的Taylor算法,并将其在水声被动定位系统中进行了仿真和性能比较,从最终仿真结果中得出较适合实际水下信道的定位算法.
【总页数】3页(P73-75)
【作者】焦小涛;李建昌;门丽娟
【作者单位】西安工业大学电子信息工程学院,陕西西安710021;中国兵器工业试验测试研究院,陕西华阴714200;中国兵器工业试验测试研究院,陕西华阴714200【正文语种】中文
【中图分类】TN953
【相关文献】
1.TDOA被动定位方法及精度分析 [J], 杨林;周一宇
2.一种基于TDOA时差法声被动定位算法研究 [J], 郭相科;刘进忙
3.水声被动定位中的互相关峰模糊现象及解模糊算法研究 [J], 安良;陈励军;方世良
4.三维AOA/TDOA被动定位及其迭代融合算法 [J], 刘继斌;刘培国;李高升;李文化;周蔚红
5.非视距环境下RSS和TDOA联合的信源被动定位 [J], 闫千里;万鹏武;卢光跃;黄琼丹;王瑾;李怡霄
因版权原因,仅展示原文概要,查看原文内容请购买。
双基阵声纳系统水下目标被动定位精度分析

火 力 与 指 挥 控 制
FieCo to r n r l& Co mm a d Co to n nrl
J n, 0 1 a 2 1
第 3 卷 第 1期 6 2 1 年 1月 01
文 章 编 号 :0 204 (0 10 —1 70 10 —6 0 2 1 ) 10下 目标 被 动 定 位 精 度 分 析
顾 晓 东 , 志 明。袁 志 勇 邱 ,
( .海 军 工 程 大 学 , 汉 1 武 4 0 3 , .海 军 装 备 研 究 院 系统 所 , 京 30 32 北 107) 0 0 3
摘 要 : 究 了 基 于 双 基 阵 的 被 动 定 位 方 法 , 述 了仅 利 用 方 位 测 量 信 息 的 纯 方 位 定 位 原 理 , 导 出 了 定 位 误 差 的几 何 研 论 推 分 布 关 系 式 及 定 位 精 度 达 到 最 高 的测 向 线 交 会 角 大 小 , 析 了测 向误 差 及 站 址 误 差 对 定 位 精 度 的 影 响 , 定 位 误 差 与 基 线 、 分 对 目标 方 位 的关 系 作 了较 细 致 的 分 析 , 同时 给 出 了整 个 探 测 区 域 的 G OP分 布 图 , 出 了 满 足 一 定 定 位 精 度要 求 的 交 会 角 范 D 得 围 。该 问题 的研 究 对 提 高定 位 精 度具 有 一 定 的 理 论 和 实 际 意 义 , 为 多 基 阵 的 合 理 布 置 和 优 化 选 择 提 供 参 考 。 可
a g e f ra r vn ts t f d p e i i n i s o n smu a i n f u e . Th t d ft e is e c n b s d n l o r i i g a a i i r cs o s h wn i i l t i r s s e o g e s u y o h s u a e u e
水声定位算法学习总结
定位算法学习总结一、无线传感器定位技术分类目前定位技术广泛地应用到各个领域,而且出现了很多定位算法,常用的定位方法有:到达角(Angel of Arrival,AOA)定位、到达时间(Time of Arrival,TOA)定位、到达时间差(Time Difference of Arrival,TDOA)定位以及AOA /TOA、AOA/TDOA等混合定位的方法。
选择哪种定位方法要根据定位精度、硬件条件等因素来确定,但是最终目的是要用优化的方法得到满意的定位精度。
在没有时间同步信号时,往往采用TDOA定位方法,TDOA定位法可消除对移动台时间基准的依赖性,因而可以降低成本并仍然保证较高的定位精度,但是需要有较好的延时估计方法,才能保证较高的时延估计精度。
(1)基于测距的定位技术基于测距的定位方法依靠测量相邻节点之间的距离或者方向信息。
现在有很多成熟的算法被用于基于测距的定位。
例如TOA算法通过信号传播时间获取距离,TDOA算法利用接收从多个节点发出信号的时间差估测位置,而AOA算法则通过为每个节点设置天线阵列来测量节点间的相对方向角度值。
(2)无需测距的定位技术无需测距的定位方法不要求距离信息,只依靠有关待定位传感器与种子节点之间连通性的测量数据。
这种定位方法对硬件要求低,但是测量的准确度容易被节点的密度和网络条件所影响,因此不能被对精度要求高的基于WSN的应用采用。
二、三边定位和多变定位(1)信号强度(RSS,Received Signal Strength)通过信号在传播中的衰减来估计节点之间的距离,无线信道的数学模型。
尽管这种方法易于实施,但却面临很多挑战。
首先信道由于受到信道噪声、多径衰减(Multi-path Fading)和非视距阻挡(Non-of- Sight Blockage)的影响[1],具有时变特性,严重偏离上诉模型;其次衰减率会随外界环境的不同而发生相应改变。
根据接收到的信号估计出的距离d 将有很大误差。
基于TDOA的声源定位装置的设计与实现
基于TDOA的声源定位装置的设计与实现
薛欣
【期刊名称】《电子产品世界》
【年(卷),期】2024(31)4
【摘要】随着工业自动化仪器仪表的迅猛发展,声音位置的实时定位是很多智能应用设备不可或缺的功能之一,其中麦克风阵列技术被广泛应用于军事、视频电视会议、智能交通以及智能机器人等领域,以提升声音捕捉和定位的效果。
针对传统麦克风阵列声源定位装置存在体积大、成本高、受环境干扰等问题,提出了一种基于STM32的便携式声源定位装置。
该装置以STM32F411RET6为核心处理器,利用STM32CubeMX和MDK-ARM进行软件程序设计。
该设计在信号处理、体积和成本等方面具有明显的优势,为弥补传统装置的缺陷提供了一种新颖的解决方案,具备广泛的应用前景和深远的研究意义。
【总页数】5页(P17-21)
【作者】薛欣
【作者单位】太原学院智能与自动化系
【正文语种】中文
【中图分类】TN929.11
【相关文献】
1.基于TDOA的声源定位算法研究及实现
2.基于智能手机TDOA估计的被动声源定位方法与系统实现
3.基于麦克风阵列的声源定位装置的设计与实现
4.基于
TDOA的声源定位系统设计5.基于TDOA声源定位算法的激光武器狙击手攻击系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
TDOA被动定位方法及精度分析概要

TDOA 被动定位方法及精度分析Ξ杨林周一宇孙仲康(国防科技大学电子工程学院长沙 410073摘要本文提出了一种利用多站 TDOA 信息对辐射源定位的非线性方程组求解方法 , 该方法简洁准确 , 无需作迭代运算 , 计算量小。
文中给出了该定位方法的精度分析 , 最后给出了在具体布站条件下的受控区域内的 GDO P 分布。
关键词无源定位 , TDOA , 时差定位 , 精度分析 , GDO P 分类号 TN 953. 7T DOA Pa ssive L oca tion Yanglin (In stitu ic , D T , Changsha , 410073Abstract , , , and com p u tati onally effcien t so lu ti on of non linear equati on of em po siti on based on the ti m e differences of arrival (TDOA m ea 2su red by lti on is p ropo sed in th is p ap er . T he accu racy analysis of the locati on m ethod is also p resen ted . F inally p erfo rm ance evaluati on resu lts of em itter locati on by u sing TDOA info rm ati on are illu strated by som e grap h s of Geom etrical D ilu ti on of P recisi on (GDO P under vari ou s conditi on s in the sp ecific su rveillance regi on .Key words Passive L ocati on , TDOA , TDOA L ocati on , A ccu racy A nalysis , GDO P无源定位系统本身不发射电磁波 , 完全是被动工作的 , 因此具有隐蔽性好的优点 , 对于提高系统在电子战环境下的生存能力具有重要的作用 [1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
£ u K i o ̄ n s i n a # r i n g
嘲 髓擞 感
响 ⑧ 蛳 囿 @ @ ⑨凹s 锄@ 匡闶 6 闶@法在 水 声被 动 定 位 下 的精 度 分析
焦 小 涛 , 李建 昌 , 门丽 娟
基站 的位 置为 ( , Y ) , i = 0 , 1 , …, ; i = 0表 示 主站 , i =1 , 2 , …, n分别 表示 个 副站 。设 被测 目标 的位置
为 x , Y ) , r i 表示 目标 与第 i 个 副站之 间 的距 离 , △ r 表 示 目标 到第 i 个 站与到 主站之 间的距 离差 ] , 用 方程
表示 为 r r 2 0 =( — o ) +( Y— Y o )
{ r = ( 一 ) + ( Y — Y i )
【 A r =r 一 r 0 =c d i
( 1 )
J I A O X i a o t a o , L I J i a n c h a n g , ME N L i j u a n
( 1 .C o l l e g e o f E l e c t r o n i c a n d I n f o r ma t i o n E n g i n e e r i n g ,Xi ’ a n T e c h n o l o g i c a l Un i v e r s i t y,Xi ’ a n 7 1 0 0 2 1, C h i n a;
2 .C h i n a O r d n a n c e T e s t R e s e a r c h I n s t i t u t e , H u a y i n S h a a n x i 7 1 4 2 0 0, C h i n a )
【 A b s t r a c t 】T w o a l g o r i t h ms o f T D O A: C h a n a l g o r i t h m a n d T a y l o r a l g o r i t h m a r e d e s c r i b e d . A i m e d a t t h e d e f e c t o f T a y l o r l— a
【 Ke y w o r d s 】T D O A; R MS E; C h a n lg a o r i t h m; T a y l o r a l g o r i t h m
l 引 言
随着对海洋 军事需 求 和经 济需 求 的不 断增 长 以 及人类 在海洋 的活动范 围和活动频 度的迅速 增加 , 水 声定 位技术越来 越受到 人们 的重视 , 尤其是被 动定 位 在 民用 和军用 两方面都有 着广泛 的应 用前景 , 广泛应 用 于海洋水下 搜 索救 援 、 水 下 物 品打捞 、 海 洋油 田水 下 管道定位 、 水 下探矿 、 水 下考古等 民用 领域 , 以及 海 军 实验靶场对 潜 艇 、 鱼 雷等 水 下装 备定 位 、 导航 等 军 事领 域 ¨ 。 本 文主要研究 了 T D O A算 法在 水 下被 动定 位 系
・ 算 法 觌・
( 1 .西安工业大学
电子信息工程学院, 陕西
西安 7 1 O Y 2 1 ; 2 .中国兵器工业试验测试研究院, 陕西 华 阴 7 1 4 2 0 0 )
【 摘
要 】介 绍 了T D O A的两种 算法 : C h a n算法和 T a y l o r 算法 , 并针对 T a y l o r 算法的缺点, 引入一种改进 的 T a y l o r 算
法, 并将 其在 水 声 被 动定 位 系 统 中进 行 了仿 真 和 性 能 比 较 , 从 最 终 仿 真 结 果 中 得 出 较 适 合 实 际 水 下 信 道 的 定 位
算法。
【 关键词 】时间差; 均方误差 ; C h a n算法 ; T a y l o r 算法 【 中图分类号 】 T N 9 5 3 【 文献标志码 】A
g o r i t h m,a n i mp r o v e d T a y l o r a l g o r i t h m wh i c h i s u s e d i n p a s s i v e u n d e r wa t e r a c o u s t i c p o s i t i o n i n g i s a l s o d e s c ib r e d . F r o m t h e
r e s u l t o f s y s t e m s i mu l a t i o n a nd pe r f o r ma n c e c o mpa r i s i o n, a b e t t e r a l g o r i t h m s ui t e d t o t h e a c t ua l un de w a r t e r c ha nn e l p o s i t i o — ni ng i s g e t t e d .