轨道车辆用永磁同步电机系统弱磁控制策略
永磁同步电机改进弱磁控制策略
2期
任少盟等: 永磁同步电机改进弱磁控制策略
������43 ������
Te
=
3 2
p[ ψf
+ (Ld
-
Lq ) id ] iq
(2)
Te
=
TL
+
J
dωr dt
+
Bωr
(3)
式中ꎬ udꎬ uq 为定子电压的 dꎬ q 轴的分量ꎻ idꎬ iq 为定子电流的 dꎬ q 轴的分量ꎻ Ldꎬ Lq 为电机在 dꎬ q 轴的电感ꎻ rs 为定子绕组的相电阻ꎻ ωe 为电角速度ꎻ Ψf 为永磁体磁链ꎻ Te 为电磁转矩ꎻ p 为电机极对数ꎻ TL 为负载转矩ꎻ ωr 为机械角速度ꎻ J 为转动惯量ꎻ B 为摩擦系数ꎮ
Abstract: In order to solve the problem in the feedforward flux ̄weakening control of permanent magnet syn ̄ chronous motorsuch as complex calculationꎬ poor stability andbeing sensitive to the parameters of the systemꎬ an improved flux ̄weakening structure which combines feedforward and feedback was proposed to make a bet ̄ ter control performance. The feedforward controller analysed the running state of the motor and calculated the best control current trajectory. The voltage feedback regulator tunes the limited parameter of the voltage lim ̄ ited ellipse in the feedforward controllerꎬ which makes the output current and torque of PMSM more stable during the fluctuation of the direct current bus voltage. The simulation of the PMSM control system was set up in the Matlab / Simulink environment to verify the effectiveness and feasibility of the proposed strategy. Key words: permanent magnet synchronousmotorꎻ flux weakeningꎻ feedforward controlꎻ feedback control
永磁同步电机弱磁最优控制策略研究

永磁同步电机弱磁最优控制策略研究GONG Jinbiao;SHI Huoquan【摘要】针对永磁同步电机(PMSM)在恒转矩区起动能力差、在恒功率区电流轨迹不易跟踪等问题,提出基于电压反馈复合电流前馈的定子电流弱磁最优控制策略.通过判断电流前馈环节达到稳定时所需的电流与采用最大转矩电流比(MTPA)算法所得电流大小,使定子电流在恒转矩区通过电流前馈作用快速跟踪MTPA曲线,加快起动;在恒功率区采用电压反馈复合电流前馈的策略,增强系统抗干扰能力的同时最大化直流母线电压利用率.为了验证该策略的可行性,搭建PMSM仿真模型,构建以dSPACE1007为核心的试验平台,对其进行仿真和试验,结果表明了该策略的稳定性和有效性.【期刊名称】《电机与控制应用》【年(卷),期】2019(046)004【总页数】6页(P32-37)【关键词】永磁同步电机;弱磁控制;最大转矩电流比;电压反馈复合电流前馈【作者】GONG Jinbiao;SHI Huoquan【作者单位】【正文语种】中文【中图分类】TM3410 引言内置式永磁同步电机(IPMSM)因其良好的功率密度和工作效率被广泛应用于各种工业场合[1]。
优化的控制策略通过适当控制电流矢量可以实现电机高利用率。
在基速范围内,最大转矩电流比(MTPA)控制策略可以实现铜耗最小化。
在需要宽速度范围运行的应用,比如电动汽车,在弱磁控制策略中利用永磁体励磁,使电机高速稳定地运行在恒功率区[2]。
对IPMSM进行弱磁区控制策略的研究有重要意义。
在传统IPMSM中,不能直接控制磁通量,只能通过去磁效应减弱气隙磁通量d轴电枢反应电流[3]。
通常采用电流前馈、电压反馈或混合弱磁方法扩展永磁同步电机(PMSM)的运行区域。
电压反馈弱磁控制是通过适当的闭环直接控制逆变器输出电压[4]。
文献[5]通过电压反馈研究不同PMSM控制系统在弱磁控制区域的变化,阐释了弱磁控制特性的参数变化以及转矩限制对弱磁控制的影响。
永磁同步电机的弱磁控制

永磁同步电机的弱磁控制
永磁同步电机被广泛应用于许多工业领域,如汽车工业、航天航空、机器人、风力发
电和家用电器等。
在永磁同步电机的控制方案中,弱磁控制是一种有效的控制方法,可以
提高永磁同步电机的效率、降低成本和减少能源消耗。
弱磁控制的主要原理是在永磁同步电机的运行过程中,通过降低磁通密度和磁场强度
来减少机械损耗和电流损耗,从而实现能耗的优化。
弱磁控制的另一个优点是可以减少永
磁模拟器的成本,因为永磁模拟器可以用绕组替代,从而减少用于控制电流的硬件成本。
弱磁控制的主要步骤包括:
1. 建立永磁同步电机的数学模型。
对于永磁同步电机的数学模型,可以采用矢量控
制法、电气模型和磁路模型等多种方法进行建模。
2. 选择合适的控制策略。
弱磁控制中,可以采用间接矢量控制和直接转矩控制两种
策略。
其中,采用直接转矩控制可以在永磁同步电机低速运行时减少电流损耗。
3. 设计控制算法。
控制算法是实现弱磁控制的关键,需要综合考虑控制精度、实时性、稳定性等因素进行设计。
4. 实现控制。
弱磁控制需要通过电子控制器来实现,在控制器中可以使用DSP、FPGA、ARM等芯片进行实现。
弱磁控制的实际应用需要考虑到永磁同步电机的不同工作状态。
在低速运行状态下,
弱磁控制可以减少永磁同步电机的电流损耗和机械损耗;在高速运行状态下,弱磁控制可
以减少永磁同步电机的谐波噪声和振动。
基于多模式SVPWM算法的永磁同步牵引电机弱磁控制策略
基于多模式SVPWM算法的永磁同步牵引电机弱磁控制策略何亚屏;文宇良;许峻峰;冯江华【摘要】弱磁控制技术可以降低逆变器的容量、拓宽调速范围,对提高轨道交通永磁同步牵引系统的性能有着重要而现实的意义。
性能优异的调制方式更能保证弱磁系统输出良好的控制性能,而大功率传动系统开关器件的开关频率较低,使得传统的空间电压矢量异步调制方法已不能满足控制策略需要,本文在分析空间电压矢量多模式调制算法原理以及永磁同步电机弱磁原理的基础上,提出了新型的基于多模式空间电压矢量调制算法的永磁同步牵引电机弱磁控制策略,保证永磁同步牵引电机弱磁控制系统能充分利用开关频率,且在异步调制和分段同步调制段都具有良好的输出特性,仿真和试验验证了本方案的可行性和有效性。
%The flux-weakening control technology could reduce the capacity of the inverter and widen the speed rang,and this are important to improve the performance of the railway traction system of permanent magnet synchronous motor.The flux-weakening control system would be have more excellent output performance because of the excellent performance of modulation,but the traditional space voltage vector modulation could not meet the need of the control strategy because of the lower switch frequency of the inverter.This paper proposes a new permanent magnet synchronous motor flux-weakening strategy based on the principle of the multi-mode space vector pulse width modulation algorithm and the principle of the permanent magnet synchronous motor flux-weakening controltheory.Then,the method could ensure that the permanent magnet flux-weakening control of railway traction system can make full use of theswitch frequency and have better performance output under asynchronous modulation and subsection synchronous modulation.The simulation and experiment verify the feasibility and effectiveness of this method.【期刊名称】《电工技术学报》【年(卷),期】2012(027)003【总页数】8页(P92-99)【关键词】永磁同步牵引电机;弱磁控制;多模式空间电压矢量脉宽调制【作者】何亚屏;文宇良;许峻峰;冯江华【作者单位】株洲南车时代电气技术中心,株洲412001;株洲南车时代电气技术中心,株洲412001;株洲南车时代电气技术中心,株洲412001;株洲南车时代电气技术中心,株洲412001【正文语种】中文【中图分类】TM3511 引言近年来,永磁同步电机以其优异性能受到轨道交通牵引系统研发人员的高度重视[1-6]。
永磁同步电机弱磁控制的控制策略研究
永磁同步电机弱磁控制的控制策略研究摘要永磁同步电机是数控机床、机器人控制等的主要执行元件,随着稀土永磁材料、永磁电机设计制造技术、电力电子技术、微处理器技术的不断发展和进步,永磁同步电机控制技术成为了交流电机控制技术的一个新的发展方向。
基于它的优越性,永磁同步电机获得了广泛的研究和应用。
本文对永磁同步电机的弱磁控制策略进行了综述,并着重对电压极限椭圆梯度下降法弱磁控制、采用改进的超前角控制弱磁增速、内置式永磁同步电动机弱磁控制方面进行了调查、研究。
关键词:永磁同步电机、弱磁控制、电压极限椭圆梯度下降法、超前角控制、内置式永磁同步电动机一、永磁同步电机弱磁控制研究现状1.永磁同步电机及其控制技术的发展任何电机的电磁转矩都是由主磁场和电枢磁场相互作用产生的。
直流电机的主磁场和电枢磁场在空间互差90°电角度,因此可以独立调节;而交流电机的主磁场和电枢磁场互不垂直,互相影响。
因此,交流电机的转矩控制性能不佳。
经过长期的研究,目前交流电机的控制方案有:矢量控制、恒压频比控制、直接转矩控制等[1]。
1.1 矢量控制1971年德国西门子公司F.Blaschke等与美国P.C.Custman等几乎同时提出了交流电机磁场定向控制的原理,经过不断的研究与实践,形成了现在获得广泛应用的矢量控制系统.矢量控制系统是通过坐标变换,把交流电机在按照磁链定向的旋转坐标系上等效成直流电机,从而模仿直流电机进行控制,使交流电机的调速性能达到或超过直流电机的性能.1.2 恒压频比控制恒压频比控制是一种开环控制,它根据系统的给定,利用空间矢量脉宽调制转化为期望的输出进行控制,使电机以一定的转速运转。
但是它依据电机的稳态模型,从而得不到理想的动态控制性能。
要获得很高的动态性能,必须依据电机的动态数学模型,永磁同步电机的动态数学模型是非线性、多变量,它含有角速度与电流或的乘积项,因此要得到精确控制性能必须对角速度和电流进行解耦。
永磁同步电机的弱磁控制
永磁同步电机的弱磁控制现有一永磁电机,需要超过额定转速运行。
使用变频器调速,则为恒功率调速,也就是弱磁掌握,不考虑电机机械和负载的因素的话,变频器能拖动电机达到多少转速?变频器一般弱磁调速的范围有多大?答:永久磁铁是恒磁的,不知如何弱磁,弱了后回到恒转矩区时又如何充磁。
1、沟通电机的电压不变,频率下降时,磁场会增加直到饱和;2、沟通电机的电压不变,频率上升时,磁场会减弱;3、缘由是电机的电势平衡原理打算的,电势平衡原理可以用电视平衡方程式表示:U-Ir=E=CeΦf U肯定,Φ↑f ↓或者Φ↓f ↑;4、电机的磁场Φ,打算于电压U的大小;5、变频器在额定频率以下运行,通过频率下降电压同时下降,保证电机磁场Φ恒定;6、变频器在额定频率以上运行,通过频率上升而电压不能上升,电机磁场Φ减弱,进入弱磁调速!7、弱磁调速,意味着电机速度超过额定转速时,额定转矩下降,就是说还要额定转矩运行,电机的功率就要随着转速正比增大,电机就会发热,无法正常运行;8、所以电机在弱磁运行时,速度高,转矩低,转速越高,转矩越小,保持功率不变,电机的发热量不增大而能正常运行;9、所以弱磁调速运行的关键是,电机所带的负载转矩必需随着速度上升反比下降,假如负载转矩不能因速度上升而反比下降,这个负载就不宜进入弱磁调速;10、你可以检测电流,弱磁调速时,假如电流随着速度上升而保持在额定电流一下,那么电机的发热量就不大,允许运行,否则就不允许弱磁调速运行;11、以上说的没有考虑轴承等机械强度是否允许的问题!12、电机进入弱磁调速,最高速度或者频率,应当是电机空载运行时,电机电流保持在额定电流及其一下的最大速度或最高频率!你可以空载试验确定!13、上述结论,是在电机轴承及其相关机械强度允许状况下!14、假如负载需要高速运行,可以通过机械传动比来实现,不肯定要电机进入弱磁调速区;。
轨道车辆用永磁同步电机系统弱磁控制策略

θ
θ
θ
id
O
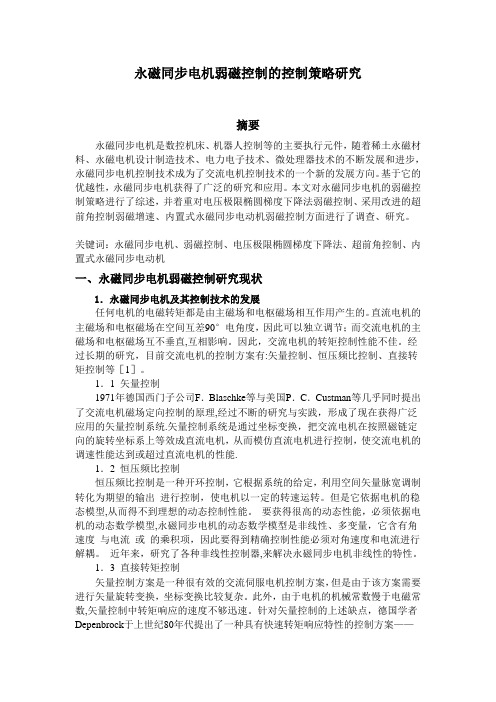
1.1 弱磁区域的确定
轨道车辆用内置式永磁同步电机运行过程中
电流、电压轨迹曲线如图 1 所示[5-15]。
MTPA
iq
MTPV A
BE DF
Teb Te1 Te2
Te3
G
H
I C
id
ωb ≥ ω1 ≥ ω2 ≥ ω3
ψ (−
f
, 0)
O
Ld
图 2 转矩、电压方向图 Fig. 2 Directions of torque and voltage
关键词:轨道车辆;内置式永磁同步电动机;弱磁控制;梯 度下降法
0 引言
内 置 式 永 磁 同 步 电 机 (interior permanent magnet synchronous motor,IPMSM)机械强度高, 磁路气隙小,电枢反应强,适于高速运行,可作为 恒转矩控制。该类电机可利用其磁阻效应来提高电 机效率和改善调速特性,且内置磁铁型永磁电机结 构简单、鲁棒性高、造价低。因此,内置式转子结 构的永磁同步电机宜用作轨道机车的牵引电机[1-3]。 轨道机车的牵引传动系统不仅要求低速时输出转 矩大,有较宽的调速范围,还要求具有较强的弱磁 性能[1-3]。弱磁控制可使 IPMSM 在低速时输出恒定 转矩,高速时输出恒定功率,有较宽的调速范围。 较强的弱磁性能可在逆变器容量不变的情况下提 高系统性能[1-18]。因此,对 IPMSM 进行弱磁控制并 拓宽弱磁范围有着重要意义。
18如果在弱磁区ii内运行时始终维持永磁同步电机的端电压为额定电压电流为额定电流则可以弱磁运行到最高转速的条件是1nmaxlim19调节电流角与机械角速度作相应的变化在理论上是可以运行到最高速并保持输出基本恒定功率接近额定容量的此时对于永磁同步电动机而言最极端的情况是电流全部为直轴电流分量且忽略定子电阻的影响时电动机可以达到的理想最高转速615max1in1in20式20说明当磁链1in时将得到最宽的弱磁控制运行性能
电动汽车永磁同步电机弱磁控制策略研究
】
+F
㈩
( 2 )
( 3 )
电磁 转矩 方 程 :
=P [ 机械 运 动方 程 :
。
+( £ d— ) i i f ]
:
‘
+ .
P
c t t
P
式中:
分别为 d 轴和 g 轴定子电压 ; R 为定子相绕组电阻; 、 £ 为d 轴和g 轴等效 的电感 ; 为永
满 足未 来 电动 汽车 的驱 动需求 . 本文基 于永磁 同 步电机 的数 学模 型 以及 约束 条件 , 介 绍 了永 磁 同步 电机 的 弱磁 控 制 的基 本 原理 以
及控制策略 , 重点研究了电压闭环反馈法弱磁控制策略的 3种实现方法 , 并采用第 1 种方法 即通过调节 直轴电流的大小来实现弱磁控制系统的设计 , 最后通过 M A T L A B软件中 S i m u l i n k 搭建 了永磁 同步 电机 弱磁控制系统 的模型 , 并进行设计与仿真 , 仿真波形验证了控制策略的可行性.
第l 6卷第 3期
2 0 1 7年 9月
淮 阴师范学院学报 ( 自然科 学版 )
J O U R N A L 0 F H U A I Y I N T E A C H E R S C O L L E G E( N A T U R A L S C I E N C E E D  ̄I O N )
绕 组采 用 空 间对 称 均 匀并 不 计 空 间各 次谐 波 ; 2 )假 定 铁 1 、 5 磁 导 率无
穷大 , 忽略同步电机中的涡流损耗和磁滞损耗 ; 3 ) 假设电机转子上不存在阻尼绕组 , 永磁体也不具有阻 尼作用 ; 4 )电机在气隙 中产生的磁动势呈正弦分布. 当永磁同步 电机处于稳态时 , 在 幽 旋转坐标系中, 同步电机电压方程可表示为 :
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轨道车辆用永磁同步电机系统弱磁控制策略
盛义发 1,喻寿益 1,桂卫华 1,洪镇南 2
(1.中南大学信息科学与工程学院,湖南省 长沙市 410083; 2.南华大学电气工程学院,湖南省 衡阳市 421001)
Field Weakening Operation Control Strategies of Permanent Magnet Synchronous Motor for
为了充分利用定子电流,在恒转矩区采用最大
转矩电流比运行[5-15],其方程如下:
id
=
ψf 2(Ld − Lq )
−
ψ
2 f
4(Lq − Ld )2
+ iq2
(2)
iq =
(8Teψ 3np
f
)2
−
4[ψ
2 f
2[ψ
2 f
− 4(Ld − 4(Ld
−
Lq
)2
][(
4Te 3np
− Lq )2 ]
)2
iq 转矩递增方向 电压递减方向 恒转矩方向
θ
θ
θ
id
O
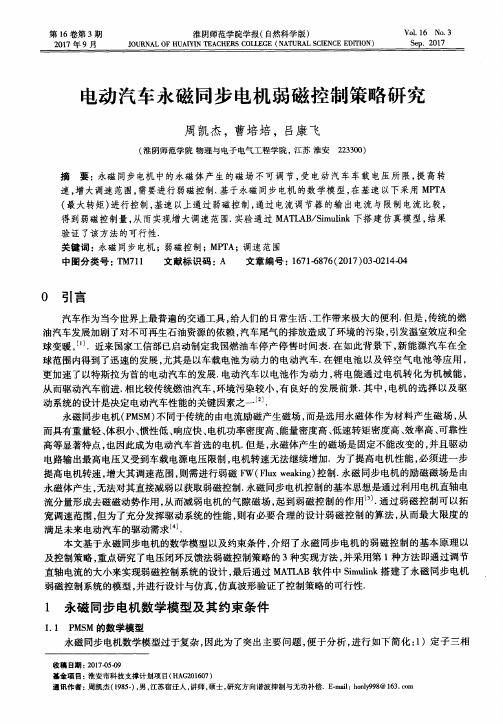
1.1 弱磁区域的确定
轨道车辆用内置式永磁同步电机运行过程中
电流、电压轨迹曲线如图 1 所示[5-15]。
MTPA
iq
MTPV
A
BE DF
Teb Te1 Te2
Te3
G
H
I C
id
ωb ≥ ω1 ≥ ω2 ≥ ω3
ψ (−
f
, 0)
O
Ld
图 1 内置式永磁同步电机运行过程电流、电压轨迹 Fig. 1 Trajectory of current and voltage of IPMSM
IPMSM 的转子磁场由永磁体产生,因此不可 能直接被减弱,其弱磁控制是利用直轴电枢反应使 电机气隙磁场减弱,从而达到等效于减弱磁场的效
第9期
盛义发等:轨道车辆用永磁同步电机系统弱磁控制策略
75
果。文献[1]提出了六步电压法,实现了对直流母线 电压的最大利用,但该算法对电机参数和负载条件 敏感,鲁棒性差。文献[4]提出了单电流调节器控制 算法,鲁棒性好,但变转速、转矩时最优直轴电压 较难选择。文献[5]采用查表法,应用前馈控制的概 念,通过查表来进行快速响应,但该算对数据表精 度要求比较高,且闭环控制器的增益较难设置。
本文研究轨道车辆用内置式永磁同步电机的 弱磁控制,提出了利用电压极限椭圆的梯度下降法 进行弱磁和电流参考值修正的新方法。该方法主要 分为弱磁区域的确定和电流参考值的修正 2 部分。 弱磁区域由恒转矩曲线方向和电压极限椭圆递减 方向之间的夹角大小来确定,电压极限椭圆递减方 向信息通过梯度下降法计算得到。电流参考值的大 小根据不同弱磁区域内弱磁方向和电压差值的幅 度大小来确定。该方法不需要查表,控制精度高, 响应速度快,鲁棒性好。
1 内置式永磁同步电机的弱磁控制
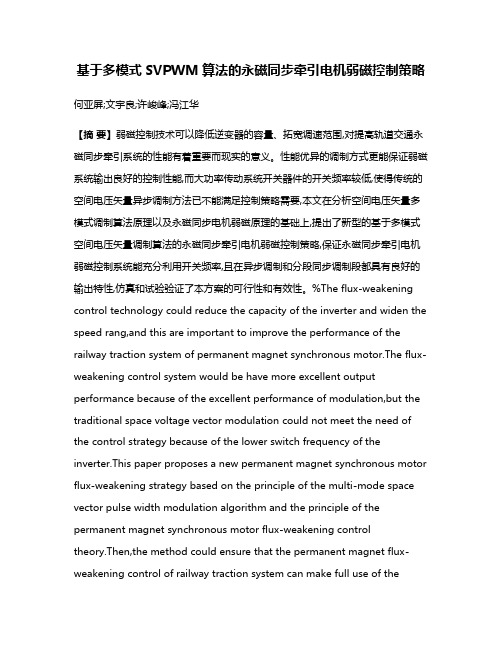
速的升高,电机的运行曲线为:从 D 点开始沿着恒 转矩曲线运行到 E 点,最后到达 C 点[5-15]。
首先根据电机的运行曲线确定其所在的弱磁 区域(弱磁区域 I、弱磁区域 II)。如图 2 中用不同的 箭头分别表示转矩递增方向、恒转矩方向和电压递 减方向。θ 角为恒转矩方向和电压递减方向之间的 夹角,根据 θ 角的大小可以确定电机运行所在的弱 磁区域。当 θ < 90° 时,电机运行于弱磁区域 I,当 θ ≥ 90° 时,电机运行于弱磁区域 II。然后,根据所 在的弱磁区域,对电流参考值进行相应的修正和弱 磁控制。
KEY WORDS: railway vehicle; interior permanent magnet synchronous motor; field weakening; gradient descent method
摘要:内置式永磁同步电机可利用其磁阻效应来提高电机效 率和改善调速特性,适宜用作轨道车辆的牵引电机。研究了 轨道车辆用内置式永磁同步电机的弱磁控制,提出了利用电
−ψ
2 f
]
+
8Teψ f / 3np
2[ψ
2 f
− 4(Ld
−
Lq )2 ]
(3)
此时,IPMSM 在电流环限制内的最大转矩/电
流运行轨迹如图 1 中 OA 所示。
为了便于工程实现,利用 Matlab 可得到 id=f (Te) 和 iq= f(Te)的函数曲线,选取 IPMSM 电机参数:PN = 100 kW ; UN = 233 V ; np = 2 ; Rs = 2.85 Ω ; RFe =
Railway Vehicles
SHENG Yi-fa1, YU Shou-yi1, GUI Wei-hua1, HONG Zhen-nan2
(1. Institute of Information Science and Engineering, Central South University, Changsha 410083, Hunan Province, China; 2. School of Electrical Engineering, University of South China, Hengyang 421001, Hunan Province, China)
第 30 卷 第 9 期 74 2010 年 3 月 25 日
中国电机工程学报 Proceedings of the CSEE
Vol.30 No.9 Mar.25, 2010 ©2010 Chin.Soc.for Elec.Eng.
文章编号:0258-8013 (2010) 09-0074-06 中图分类号:TM 351 文献标志码:A 学科分类号:470·40
图 2 转矩、电压方向图 Fig. 2 Directions of torque and voltage
1.2 弱磁区域 I 的运行分析
内置式永磁同步电机的电磁转矩方程如下:
Te
=
3 2
np
[ψ
f
iq
+ (Ld
−
Lq )id iq ]
(1)
式中:ψf 为转子永磁磁链;np 为极对数;Ld 和 Lq
为交、直轴电感;id 和 iq 为交、直轴电流。
ABSTRACT: The interior permanent magnet synchronous motor (IPMSM) can make use of the magnetoresistive effect to improve its efficiency and speed characteristics, so that it is suited to railway vehicle. The field weakening control strategy of interior permanent magnet synchronous motor for railway vehicle was studied in the paper. A novel method of modifying the current reference and field weaking based on gradient descent of voltage limit according to the ellipse were proposed. The method consists of two parts, one is the determination of the field weakening region, another is the current reference modification. The field weakening region was determined by the angle between the constant torque direction and the voltage limited ellipse decreasing direction. The direction of voltage limited ellipse decreasing was calculated by using the gradient descent method. The current reference was modified by the field weakening direction and the magnitude of the voltage error according to the field weakening region. The simulink model was founded by Matlab and the experiment platform of the 100 kW IPMSM field weakening control system was implemented using a TMS320LF2407A DSP. The validity of the proposed strategy was proved by the simulation and experimental results.
76
中国电机工程学报
第 30 卷
102.85 Ω;Ld = 2.5 mH;Lq = 7.5 mH;J = 0.008 kg⋅m2; ψf = 0.75 Wb;nN = 1 800 r/min。采用多项式拟合方 法可得 3 阶多项式拟合函数表达式为
id = −0.001Te3 − 0.003 2Te2 + 1.575Te − 0.217 (4) iq = 0.003Te3 − 0.021 6Te2 − 0.010 3Te + 0.112 (5) 当 IPMSM 运行速度大于基速时,受到电压和 电流极限环的限制,电机进入弱磁区域 I 内运行。 为最大限度利用逆变器容量,控制电流矢量沿着电