最小二乘法的椭圆拟合
最小二乘法椭圆拟合

最小二乘法椭圆拟合最小二乘法椭圆拟合是一种常用的数据处理方法,在很多领域中都有着广泛的应用。
本文将从什么是椭圆、最小二乘法和椭圆拟合的原理、步骤、优劣性及应用等方面介绍椭圆拟合的相关知识,并为读者提供一些实际应用的指导。
一、什么是椭圆?椭圆是一个平面内一组点到定点F1和F2的距离和为常数2a,同时F1和F2之间的距离为2c的点的集合。
椭圆也可以通过半轴a和半轴b描述。
其中a是长半轴,b是短半轴。
当a=b时,椭圆变为圆。
二、最小二乘法在统计学中,最小二乘法是一种优化问题的解决方法。
其主要思想是寻找一个函数,使得该函数的平方误差最小。
最小二乘法可以应用于拟合数据、数据平滑和模型选择等。
三、椭圆拟合椭圆拟合是一种利用最小二乘法对数据点进行椭圆拟合的方法。
通过选定适当的变量,确定椭圆的参数,如半轴a、b、圆心坐标以及旋转角度等。
然后根据最小二乘法的原理,对数据点进行拟合,以得到最佳结果。
椭圆拟合的步骤如下:1、对给定数据点进行转换,使得椭圆的中心位于坐标系的原点。
2、确定初始半轴长度和旋转角度,以及拟合系数。
3、根据拟合系数的值,计算每个数据点到椭圆的距离。
4、通过最小二乘法计算椭圆的半轴、中心坐标及旋转角度等参数。
5、根据计算结果得到拟合后的椭圆形状和位置。
椭圆拟合的优劣性:椭圆拟合是一种常用的数据处理方法,具有较高的精度和稳定性。
对于大多数应用场合,椭圆拟合提供了较好的结果。
但由于其计算量较大,对于大数据量的情况,需要选择合适的算法加以处理。
椭圆拟合的应用:椭圆拟合的应用领域非常广泛。
例如,医学影像诊断中的肿瘤边缘拟合、图像分析中的目标检测、遥感图像处理中的轨迹分析等等。
在实际应用中,我们可以根据具体的需求和情况,选择合适的方法,把椭圆拟合技术应用到数据处理中。
总之,最小二乘法椭圆拟合是一种常用的数据拟合方法,具有许多应用。
通过对其原理、步骤、优劣性及应用方面做出详细介绍,相信读者已经对椭圆拟合有了全面的认识,能够灵活运用于实际应用中。
(完整版)最小二乘法拟合椭圆附带matlab程序
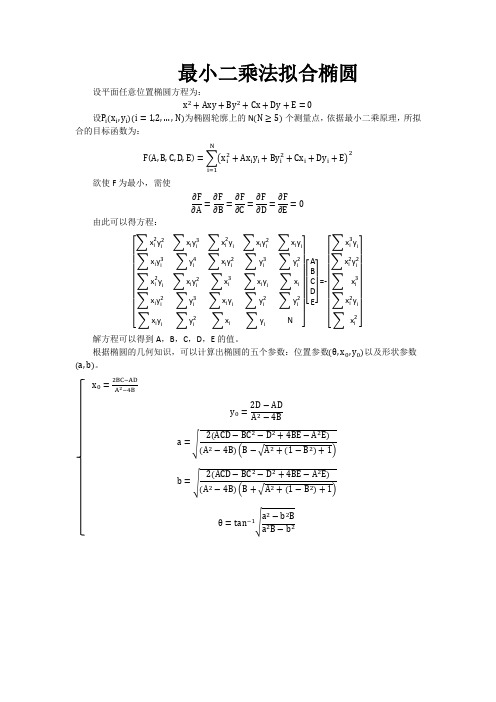
最小二乘法拟合椭圆设平面任意位置椭圆方程为:x 2+Axy +By 2+Cx +Dy +E =0设P i (x i ,y i )(i =1,2,…,N )为椭圆轮廓上的N (N ≥5) 个测量点,依据最小二乘原理,所拟合的目标函数为:F (A,B,C,D,E )=∑(x i 2+Ax i y i +By i 2+Cx i +Dy i +E)2Ni=1欲使F 为最小,需使∂F ∂A =∂F ∂B =∂F ∂C =∂F ∂D =∂F ∂E=0 由此可以得方程:[ ∑x i 2y i 2∑x i y i 3∑x i 2y i ∑x i y i 2∑x i y i ∑x i y i 3∑y i 4∑x i y i 2∑y i 3∑y i 2∑x i 2y i ∑x i y i 2∑x i 3∑x i y i ∑x i ∑x i y i 2∑y i 3∑x i y i ∑y i 2∑y i 2∑x i y i ∑y i 2∑x i ∑y i N ] [ A B C D E ] =-[∑x i 3y i ∑x i 2y i 2∑ x i 3∑x i 2y i ∑ x i 2] 解方程可以得到A ,B ,C ,D ,E 的值。
根据椭圆的几何知识,可以计算出椭圆的五个参数:位置参数(θ,x 0,y 0)以及形状参数(a,b )。
x 0=2BC−ADA 2−4By 0=2D −AD A 2−4Ba =√2(ACD −BC 2−D 2+4BE −A 2E )(A 2−4B )(B −√A 2+(1−B 2)+1)b =√2(ACD −BC 2−D 2+4BE −A 2E )(A 2−4B )(B +√A 2+(1−B 2)+1)θ=tan−1√a 2−b 2B a 2B −b 2附:MATLAB程序function [semimajor_axis, semiminor_axis, x0, y0, phi] = ellipse_fit(x, y)%% Input:% x —— a vector of x measurements% y ——a vector of y measurements%% Output:%semimajor_axis—— Magnitude of ellipse longer axis%semiminor_axis—— Magnitude of ellipse shorter axis%x0 ——x coordinate of ellipse center%y0 ——y coordinate of ellipse center%phi——Angle of rotation in radians with respect to x-axis%% explain% 2*b'*x*y + c'*y^2 + 2*d'*x + 2*f'*y + g' = -x^2% M * p = b M = [2*x*y y^2 2*x 2*y ones(size(x))],% p = [b c d e f g] b = -x^2.% p = pseudoinverse(M) * b.x = x(:);y = y(:);%Construct MM = [2*x.*y y.^2 2*x 2*y ones(size(x))];% Multiply (-X.^2) by pseudoinverse(M)e = M\(-x.^2);%Extract parameters from vector ea = 1;b = e(1);c = e(2);d = e(3);f = e(4);g = e(5);%Use Formulas from Mathworld to find semimajor_axis, semiminor_axis, x0, y0, and phi delta = b^2-a*c;x0 = (c*d - b*f)/delta;y0 = (a*f - b*d)/delta;phi = 0.5 * acot((c-a)/(2*b));nom = 2 * (a*f^2 + c*d^2 + g*b^2 - 2*b*d*f - a*c*g);s = sqrt(1 + (4*b^2)/(a-c)^2);a_prime = sqrt(nom/(delta* ( (c-a)*s -(c+a))));b_prime = sqrt(nom/(delta* ( (a-c)*s -(c+a))));semimajor_axis = max(a_prime, b_prime); semiminor_axis = min(a_prime, b_prime); if (a_prime < b_prime)phi = pi/2 - phi;end欢迎交流:邮箱:*****************。
matlab最小二乘法拟合椭圆
matlab最小二乘法拟合椭圆在MATLAB中使用最小二乘法拟合椭圆的方法如下:1. 假设我们有一组二维点的坐标数据,可以表示为 (x, y)。
我们的目标是找到一个椭圆方程来最好地拟合这些点。
2. 根据椭圆的标准方程,我们可以将椭圆表示为 Ax^2 + Bxy + Cy^2 + Dx + Ey + F = 0 的形式。
其中 A、B、C、D、E 和 F 是椭圆的参数,需要确定。
3. 我们可以将这个问题转化为一个最小二乘问题,通过找到参数 A、B、C、D、E 和 F,使得该方程对每个数据点 (x, y) 的误差最小化。
4. 在MATLAB中,可以使用 lsqnonlin 函数来解决最小二乘问题。
首先,定义一个误差函数,即方程 Ax^2 + Bxy + Cy^2 + Dx + Ey + F 的值与点 (x, y) 之间的距离差的平方之和。
5. 然后,使用 lsqnonlin 函数来最小化误差函数并找到最佳的参数 A、B、C、D、E 和 F。
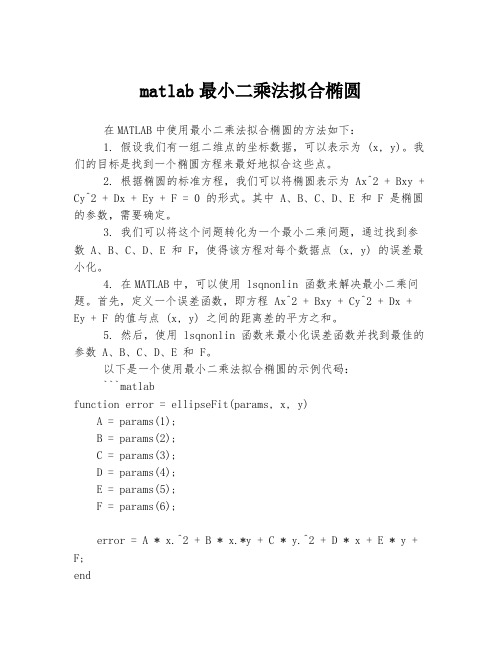
以下是一个使用最小二乘法拟合椭圆的示例代码:```matlabfunction error = ellipseFit(params, x, y)A = params(1);B = params(2);C = params(3);D = params(4);E = params(5);F = params(6);error = A * x.^2 + B * x.*y + C * y.^2 + D * x + E * y + F;endx = [1, 2, 3, 4, 5]; % 输入数据点的 x 坐标y = [2, 4, 5, 6, 7]; % 输入数据点的 y 坐标params0 = [1, 1, 1, 1, 1, 1]; % 初始参数猜测值% 使用 lsqnonlin 函数求解最小二乘问题params = lsqnonlin(@(params)ellipseFit(params, x, y),params0);A = params(1);B = params(2);C = params(3);D = params(4);E = params(5);F = params(6);disp(['椭圆方程: ', num2str(A), 'x^2 + ', num2str(B),'xy + ', num2str(C), 'y^2 + ', num2str(D), 'x + ', num2str(E), 'y + ', num2str(F), ' = 0']);```这段代码根据输入的数据点坐标进行最小二乘拟合,得到椭圆方程的参数,并打印出椭圆方程。
最小二乘改进算法及其在椭圆拟合中的应用

文章编号: 1672 - 687 1 ( 20 14 ) 03 - 00 1 8 - 04
最小二乘改进算法及其在椭圆拟合中的应用
马向南, 李 航, 刘丽丽, 刘志伟
( 河南科技大学 机电工程学院, 河南 洛阳 47 1003 ) 摘要: 提出一种像素级边缘检测椭圆拟合新算法, 用该算法对最小二乘算法进行了改进。首先, 将符合要求 的 准椭圆转化到归一化坐标系; 然后利用最小二乘法进行亚像素级椭圆拟合; 最后, 采用二次曲线拟合点集求 解 出亚像素及椭圆几何中心。在给定的图形中, 利用本文提出的改进像素级边缘检测算法可以明显提高拟合 不 确定度和拟合精度。 关键词: 最小二乘法; 边缘检测; 椭圆拟合; 亚像素 中图分类号: TP39 1 文献标志码: A
图 1 算法流程图
2 实验结果及分析
2. 1 求解结果 本文提出的算法采用 Matlab 得以实现, 实验结果是在一台安 装有 Matlab 7 . 0 的机器上 运行 的。由 于一般的图片很大, Matlab 程序遍历图像搜索椭圆耗 时 较 长, 为 提 高 图 像 的 检 测 效 率, 在算法开始前对 图像进行预处理。方法为提取感兴趣区域, 只在该区域 检测 椭圆, 因 此 提 高 了 检 测 的 目 标 性, 从而提升 了检测速度。 首先对边缘进行检测, 然后需要对准椭圆点进行归一化处理: Abar =[ A( : , 1 )-dCenterXA ( : , 2 )-dCenterY ] ;
8] 。 因 此, 本文对 不足, 但是由于目标函数的表达非 常 复 杂, 所 以 求 解 过 程 工 作 量 很 大, 而且不易实现[
代数拟合法进行了改进, 旨在解决代数拟合中各参数贡献不同的问题, 弥补传统的最小二乘拟合在本文
最小二乘拟合椭圆如何加入约束条件
最小二乘拟合椭圆如何加入约束条件
最小二乘拟合椭圆时,可以加入约束条件以进一步限制拟合过程。
这些约束条件通常包括:
1. 椭圆的中心在某个特定位置:通过设置椭圆中心的位置参数,可以确保拟合的椭圆中心位于特定位置。
2. 椭圆的轴长比例:通过设置长轴和短轴的比例参数,可以限制拟合的椭圆轴长比例,确保其符合特定要求。
3. 椭圆的旋转角度:通过设置椭圆的旋转角度参数,可以限制拟合的椭圆在平面上的旋转角度,确保其与特定方向对齐。
在最小二乘法拟合椭圆的过程中,可以引入拉格朗日乘子法来处理这些约束条件。
通过引入拉格朗日乘子,可以将约束条件转化为等式约束,并将其加入到目标函数中。
然后,使用最小二乘法求解优化问题,以最小化目标函数并满足约束条件。
具体来说,对于每个约束条件,可以定义一个拉格朗日乘子,并将其与目标函数中的对应参数相乘。
这样,在最小化目标函数时,会同时考虑约束条件的影响。
通过求解优化问题,可以得到满足所有约束条件的拟合椭圆。
需要注意的是,在实际应用中,可能需要根据具体问题对约束条件进行选择和调整。
此外,对于复杂的数据集和多个约束条件的情况,最小二乘拟合椭圆的过程可能会变得比较复杂。
因此,建议在实际应用中根据具体情况选择合适的算法和工具进行拟合。
最小二乘法拟合椭圆附带matlab程序
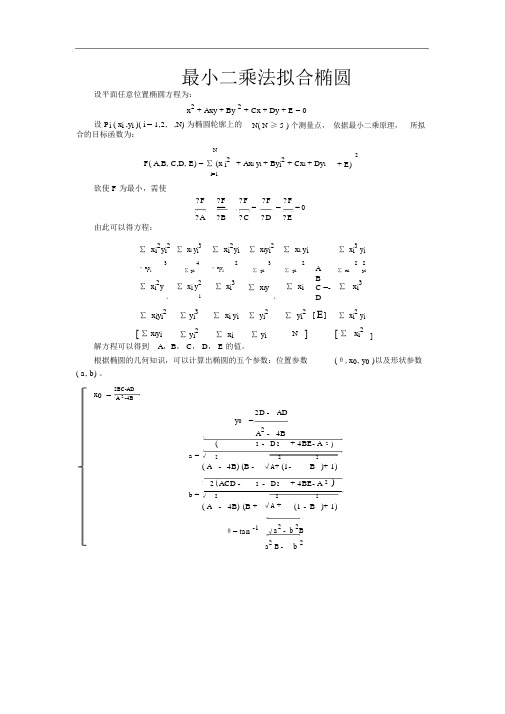
最小二乘法拟合椭圆设平面任意位置椭圆方程为:x 2 + Axy + By 2 + Cx + Dy + E = 0设 P i ( x i ,y i )( i = 1,2, ,N) 为椭圆轮廓上的 N( N ≥ 5 ) 个测量点, 依据最小二乘原理, 所拟合的目标函数为:N2F( A,B, C,D, E) = ∑ (x i2+ Ax i y i + By i 2+ Cx i + Dy i+ E)i=1欲使 F 为最小,需使F ?F?F ?F =?F?A===?D= 0?B?C?E由此可以得方程:∑ x i 2y i 2 ∑ x i y i 3∑ x i 2y i ∑ x i y i 2∑ x i y i∑ x i 3 y i34232A 2 2∑x i yi∑ y i∑x i yi∑ y i∑ y i∑ x i y i ∑ x i 2y∑ x i y2∑ x i3∑ x i y∑ x iB∑ x i 3iiC =-iD∑ x i y i2∑ y i 3∑ y i2∑ y i2 ∑ x i 2y i∑ x i y i[ E ][ ∑ x i y i∑ y i 2 ∑ x i ∑ y iN ] [ ∑ x i2]解方程可以得到A ,B ,C ,D ,E 的值。
根据椭圆的几何知识,可以计算出椭圆的五个参数:位置参数(θ,x 0, y 0 )以及形状参数( a, b) 。
x 0 =2BC-ADA 2 -4By 0 2D - A D=4BA 2-(2 - D 2 + 4BE- A 2 )a = √ 2- 4B) (B - 2B 2)+ 1)( A √A + (1-2 ( ACD -2 -D 2+ 4BE- A 2 )b = √ 2- 4B) (B + 2(1 - B 2)+ 1)( A √A +θ= tan-1√a 2 - b 2Ba 2 B -b 2附: MATLAB程序function [semimajor_axis, semiminor_axis, x0, y0, phi] = ellipse_fit(x, y)%%Input:%x —— a vector of x measurements%y —— a vector of y measurements%%Output:%semimajor_axis —— Magnitude of ellipse longer axis%semiminor_axis —— Magnitude of ellipse shorter axis%x0 —— x coordinate of ellipse center%y0 —— y coordinate of ellipse center%phi—— Angle of rotation in radians with respect to x-axis%%explain%2*b'*x*y + c'*y^2 + 2*d'*x + 2*f'*y + g' = -x^2%M * p = b M = [2*x*y y^2 2*x 2*y ones(size(x))],% p = [b c d e f g] b = -x^2.%p = pseudoinverse(M) * b.x = x(:);y = y(:);%Construct MM = [2*x.*y y.^2 2*x 2*y ones(size(x))];%Multiply (-X.^2) by pseudoinverse(M)e = M\(-x.^2);%Extract parameters from vector ea = 1;b = e(1);c = e(2);d = e(3);f = e(4);g = e(5);%Use Formulas from Mathworld to find semimajor_axis, semiminor_axis, x0, y0, and phidelta = b^2-a*c;x0 = (c*d - b*f)/delta;y0 = (a*f - b*d)/delta;phi = 0.5 * acot((c-a)/(2*b));nom = 2 * (a*f^2 + c*d^2 + g*b^2 - 2*b*d*f - a*c*g);s = sqrt(1 + (4*b^2)/(a-c)^2);a_prime = sqrt(nom/(delta* ( (c-a)*s -(c+a))));b_prime = sqrt(nom/(delta* ( (a-c)*s -(c+a))));semimajor_axis = max(a_prime, b_prime); semiminor_axis = min(a_prime, b_prime); if(a_prime < b_prime)phi = pi/2 - phi;end。
基于稳健估计的直接最小二乘椭圆拟合
( 4 )
组成法方程求解, 迭代至收敛即可得到系数 m
[ 7 , 8 ]
解出相应的二次曲线。对于 N点的观测数据, 数学
6 ] 为: 准则 [ 2 D ( m, n ) ∑F m i n= i = 1 i N
( 2 )
按照上述数学准则, 若所有测定点均处在二次 曲线上, 则对于任意点均应满足二次曲线的一般方 程。文献[ 3 ] 中, 对不满足方程的量作最小二乘拟 合, 列出各点的误差方程为:
2 1 ) 中必须限定 b - 4 a c < 0才能保证 初衷。并且式(
拟合的结果为椭圆, 否则拟合结果有可能是抛物线
3 , 9 ] 或者双曲线的某一支 [ 。 2 假定各点观测值独立, 引入权函数 P= P为 Λ(
对角阵) , 引入新的椭圆拟合准则为: E B m m i n= Λ
2 2
( 5 ) ( 6 )
x , y ) 到曲线 F ( m , n )= 0的代数距离, 即可通 点( i i
6 ] 过求解所有点的最小代数距离平方和 [ 的方法求
2 ㊀隧道断面检测施测方案
上海长兴岛至浦东越江隧道设计为双线、 双层、 单向两车道, 上层汽车下层为轨道交通, 设计内径 6 . 8 5m , 一般每个断面以等角度或等间距测 4 0 5 0 个点。 断面检测需要高精度的观测数据, 才能正确地 反映出隧道管片与实际设计时发生的变形信息。长 江隧道工程为提高盾构贯通精度, 在隧道内布设了 高精度的导线点, 同时每隔两千米采用高精度陀螺 仪复测方位角以提高盾构导向精度。这些导线点在 隧道内均设有强制对中装置, 可以依托这些高精度 的导线点进行加密, 获取当前断面检测时测站点的 较高精度的三维坐标。测站点使用 L e i c a 1 2 0 0系列 断面扫描仪获取两套坐标, 其中一套是测站任意平 面坐标, 另外一套是工程坐标系下断面上多个点的 工程坐标系坐标。断面扫描仪根据机载软件和提前 输入的道路曲线要素自动调整以保证所测断面垂直 于当前隧道轴线, 同时可以设置一定的限差和测量 角度范围以避免扫描到过多的非管片点。 软件解算时若采用三维坐标, 需将所测得断面 先拟合到一个平面中去, 并计算出工程坐标系下的 平面方程, 然后将三维坐标转换为平面坐标以便于 采用平面二次曲线拟合的方法拟合断面椭圆
c++ 最小二乘法拟合椭圆方程

C++最小二乘法拟合椭圆方程椭圆是数学中的一个重要概念,它在几何学、物理学、工程学等领域都有着广泛的应用。
在实际的问题中,我们经常需要对给定的椭圆数据进行拟合,以找到与其最符合的椭圆方程。
而在C++编程中,最小二乘法是求解拟合问题的一种常用方法。
本文将介绍如何利用C++语言实现最小二乘法拟合椭圆方程的过程。
一、最小二乘法原理1. 概念介绍最小二乘法是一种数学优化方法,用于对一组数据进行曲线拟合。
其核心思想是通过最小化实际观测值与拟合值之间的误差平方和来确定拟合参数的取值,从而使拟合曲线尽可能地接近实际观测值。
在椭圆拟合问题中,最小二乘法可以帮助我们找到与给定数据最匹配的椭圆方程。
2. 公式推导假设我们有一组椭圆数据点(xi, yi),我们需要找到一个椭圆方程,使得数据点到椭圆边界的距离之和最小。
椭圆方程的一般形式为:(x - x0)^2 / a^2 + (y - y0)^2 / b^2 = 1其中,(x0, y0)为椭圆中心坐标,a和b分别为长轴和短轴的长度。
我们可以建立参数方程表示椭圆上的点:x = x0 + a * cos(t)y = y0 + b * sin(t)将数据点(xi, yi)代入方程,可以得到误差函数:E = Σ[(x - xi)^2 / a^2 + (y - yi)^2 / b^2 - 1]^2其中,Σ表示求和符号,E表示误差平方和。
通过最小化误差函数E,可以求得参数x0, y0, a, b的最优解,从而得到最符合给定数据的椭圆方程。
二、C++代码实现1. 数据输入我们需要从外部读入椭圆数据点(xi, yi),并存储到数组或向量中,以备后续处理。
2. 参数优化接下来,我们可以使用最小二乘法对椭圆方程的参数进行优化。
C++中可以通过梯度下降法、牛顿法等数值优化算法来求解最小化误差函数的过程,从而得到最优的椭圆参数。
3. 结果输出我们可以将优化后的椭圆方程参数输出,得到拟合结果。