卫星测控分系统设计
测控分系统设计

引导信标机,由于它的波束宽,用于地面雷达系统的捕获
航天器的目标,
2016/11/5
24
连续波测量系统 连续波测量系统分为多普勒频移系统、距离和距离变化 率测量系统、相位比较系统和这些系统的多种变化类型。 多普勒频移系统:利用多普勒效应测定航天器的径向速度, 借以测量航天器的飞行轨迹。多普勒频移是由地面向航天器 或由航天器向地面发射固定的频率的等幅电磁波,因航天器 和地面站存在相对运动,接收信号的频率与发射的频率互不 相同,其频率之差就是多普勒频移。多普勒频移正比于测控 站与航天器方向上的速度分量,所以测量出多普勒频移的大 小,就可获得航天器相对测控站的相对径向速度。
波长 100~10m 10~1m 1~0.3m 30~15m 15~7.5m 7.5~7.35m 3.75~2.5m 2.5~1.67m 1.67~1.11m 1.11~0.75m 0.75~0.1m
测控协议 数据率小于12Mb/s, 采用S频段 数据率在12~50Mb/s, 采用C频段或X频段 数据率50~100Mb/s, 采用X频段 数据率100~1000Mb/s,采用Ku/Ka/w频段
遥控技术
通过对遥测参数、姿态和轨道参数的 研究和分析,发现航天器的轨道、姿 态、某个工程分系统或有效载荷工作 状况异常或出现故障,判断出故障部 位和做出决策,向卫星发出有关命令 ,修正轨道和姿态,调整分系统和有 效载荷的运行参数,甚至切换备份或 部件。 遥控指令动作的结果,再通过遥测信 道传到地面站进行回报证实。 遥测和遥控两种技术综合起来构成一 种保证航天器正常运行,增加可靠性 ,延长寿命的重要闭环手段。
PCM-BPSK(副载波) PCM-CDMA-BPSK PCM-CDMA-BPSK-FH ----------4kbps/8kbps 直接序列扩频 10.23Mchip/s GOLD码 1023 --2048bps/32768bps 直接序列扩频 10Mchip/s GOLD码 1023 R-S+卷积 1712 bps
微纳卫星测控分系统设计

微纳卫星测控分系统设计摘要:本文介绍了基于VHF/UHF的测控分系统设计,适用于微纳卫星的应用。
VHF/UHF测控应答机使用零中频接收机和直接IQ调制发射机,实现了微纳卫星对电单机的低功耗、小体积的要求。
关键词:测控分系统、VHF/UHF、无线射频1系统组成测控分系统是微纳卫星对地面通信的无线传输通道,由测控应答机和测控天线组成,测控分系统组成如图 1所示。
图1测控分系统系统组成2测控应答机设计2.1测控应答机基本功能测控应答机的基本功能如下:(1)接收地面发送的上行遥控信号并进行解调,执行或转发指令至星务计算机;(2)将星务计算机送来的遥测参数调制后下传至地面;(3)采集测控分系统自身的工程参数,通过系统总线发送至中心计算机。
2.2测控应答机方案VHF/UHF测控模块采用专用解调、调制芯片与FPGA芯片相结合的电路完成信号的解调、调制、数据收发等功能。
电路主要包括上行信号滤波电路、FM解调下变频电路、A/D与D/A变换电路、数字信号处理FPGA电路,电源变换电路、调制芯片电路、功率放大电路、CAN总线接口电路,模块电路原理框图如图 2。
图2测控应答机框图上行遥控信号VHF接收天线接收的信号经带通预选滤波、阻抗匹配后输入解调模块,在模块内部内部经过低噪放、I/Q混频、低通滤波后将差分I/Q信号输出给ADC采样,采样后的数字信号送给FPGA芯片解调出遥控数据,通过CAN总线送给星务主机。
FPGA芯片通过CAN总线接收星务计算机送来的下行遥测数据,进行组帧、编码输出数字信号,由DAC转换成的差分I/Q模拟信号,经RC滤波滤除高频噪声分量后输入调制模块,搬移频谱到所需的下行频率,经放大器放大后,由UHF发射天线向地面辐射。
3测控天线设计3.1天线基本要求测控天线使用全向VHF/UHF棒状天线,天线的布局主要考虑以下几点:(1)满足微纳卫星结构的约束;(2)微纳卫星在各种姿态条件下,天线的主瓣方向指向通信方向;(3)减小发射天线对接收机的影响;(4)频率相近的天线相互耦合时,对天线远场辐射特性的影响。
一种高集成小卫星测控系统的综合设计

一种高集成小卫星测控系统的综合设计赵笛;刘朋;李红宝;韩孟飞【摘要】在传统小卫星测控系统的S频段应答机、中继测控单元、遥控单元及星务管理单元的设计基础上,对小卫星测控系统进行了综合设计.设计中采用低温共烧陶瓷(LTCC)、微组装工艺、键合技术、片上系统(SOC)微型芯片等新技术,将小卫星测控系统各功能单元融合在一台高集成、多功能的小型化测控产品中,实现星上资源的统一利用和测控任务的统一调度管理.与传统的小卫星测控系统相比,体积减小70%,质量减小80%,功耗降低35%,可满足小卫星体积小、质量小、功耗低的产品需求.文章提出的设计可为后续集成测控系统的设计提供参考.【期刊名称】《航天器工程》【年(卷),期】2015(024)005【总页数】5页(P86-90)【关键词】小卫星;测控系统;集成设计【作者】赵笛;刘朋;李红宝;韩孟飞【作者单位】航天东方红卫星有限公司,北京 100094;航天东方红卫星有限公司,北京 100094;航天东方红卫星有限公司,北京 100094;航天东方红卫星有限公司,北京100094【正文语种】中文【中图分类】V443“机箱与缆线”(Box-and-harness)一直是国内外卫星测控系统的主流设计方法。
这种设计方法使各独立功能模块之间保持明显的界线,具有试验和交叉搭接容易等优点。
然而,分立设计方式会导致系统尺寸、质量、费用增加。
我国传统小卫星测控系统设计由于考虑可靠性及成熟度等因素,也多采用具有独立功能的单机产品来实现测控系统的各项功能,设备数量较多,系统较为复杂。
随着微电子技术、微机械、微光学等微机电技术的进步,以及深空探测任务的推动,未来的星载测控系统将采用数字化的复合型设计体制,具有多功能、多通道、小型化等特点[1]。
本文在传统小卫星测控系统设计的基础上,提出了一种高集成测控系统设计方案,在一台单机产品内集成了传统设计中测控与星务2个分系统,可实现星地测控及测距测速、中继测控、遥控指令译码、遥控注入数据解密解扰、整星任务调度管理、遥测数据管理、有效载荷状态采集和管理、整星温度测量和控制等诸多功能。
航天测控和通信系统(王新升)
9
2. 卫星测控信道传输及测控的基本原理
2.2航天通信技术的三种情况
对地观测卫星,除测控信道(点频)外,采用另一个 信道单独传送高数据率的遥感数据,该类信道是单 向下行; 载人航天器,除测控信道外,其通信信道中除对地 观测,空间科学实验和空间生产数据外,还有航天 器之间的话音通信,电视信号等,数据传输双向交 互,具有上行和下行; 专门分化出经营通信及广播的卫星,通信为双向, 广播为单向的。
LS LA LP
极化损耗;
L RP
为接收天线指向损耗; 为天线增益;
GR
L r c 接收天线至接收机之间馈线带来的馈线损耗; SF
为系统设计时预留的安全因素
14
3. 航天器测控与通信分系统设计
3.1遥测分系统设计
1)遥测基带信号格式
帧同 步码 帧号 1路 2路 3路 全帧 计数 副1'路 副2'路 N-3 路 N-2 路
d l ct l
;其中距离差是由两
个接收点接收电磁波的相位差 t 计统、角饲服系统、天线机座及与上述系统相配套的计算 机、时统、角引导设备等组成,原理是直接测出接收跟踪天线波束的指向,测角的精度取决于天线波 束的宽度,跟踪饲服系统的精度,接收机灵敏度等因素。
CAST2000平台
21
3. 航天器测控与通信分系统设计
3.3 小卫星测控系统实例
*小卫星的主要技术指标
22
3. 航天器测控与通信分系统设计
3.4跟踪分系统设计
跟踪分系统的功能包括:角跟踪、测距、测速功能
1)角跟踪方法
a)干涉仪法 卫星发出的无线电传输到地面相距为 L 的两个不同接收点 R1、R2 的距离差 d,则 c o s
基于移动Agent卫星测控分布式系统设想
( )从代码生成移动代理对象 ;( )负责将移动代理对象实 1 2
例系 列化 成中间码 以传送和保存 。
I 1前,组成我国 C频段同步卫星测控 网的设备与任 务中
心之间通过 网络 T P I 协议 已实现全透 明监控和数据 处理的 C/ P
工作模 式 ,在此基础 如何合理有 效的利用有 限的地面设备 完
维普资讯
20 年第5 08 期 ( 总第 1 5期 ) 0
大 众 科 技
DA ZHONG KE J
No. 2 0 5, 0 8
( muai l N .0 ) Cu lt ey o1 5 v
基于移 动 A e t卫星测控分布式 系统设想 gn
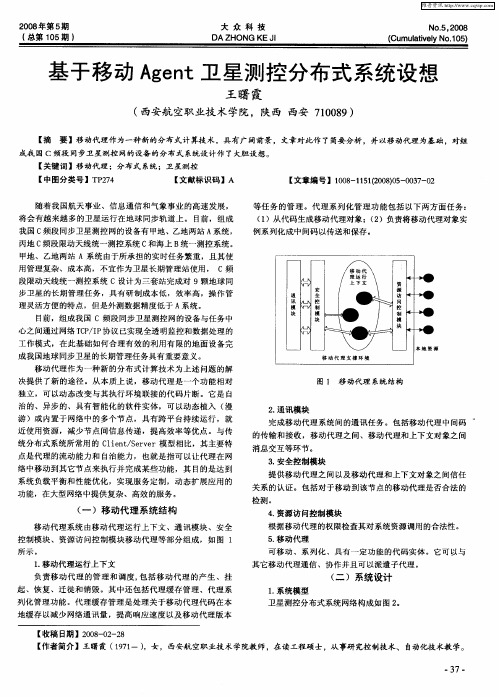
随着我 国航 天事业 、信 息通 信和气象 事业的高速 发展 , 将会有越来越 多的卫星运行在 地球 同步轨道上 。 目前 ,组成 我国 C频段同步卫星测控 网的设备有 甲地 、乙地两站 A系 统, 丙地 C 频段 限动 天线 统一测控 系统 C和海上 B统一测控系 统。 甲地、乙地两站 A系统 由于所承担 的实 时任 务繁重,且其使 用管理复杂、成本高,不宜作为卫星长期管理站使用 , C频 段限动天线统一测控系统 C设计 为三 套站完成对 9颗地 球 同 步卫星的长期 管理 任务 ,具有研 制成本低 ,效率高 ,操 作管 理灵活方便的特 点,但是外测数据精度低于 A系统 。
【 键 词 】移 动 代 理 ; 分 布 式 系统 ;卫 星 测 控 关
【 中图分类号 】T 2 4 P 7
【 文献标识码 】A
【 文章编号 】10 — 1 1 0 80 — 0 7 0 0 8 15 ( 0 )5 0 3 — 2 2 等任 务的管 理。代 理系列化 管理功 能包括 以下两 方面任 务:
卫星控制系统测试数据自动判读系统设计

WU J i n g,L U We n g a o ,C HANG Wu J u n
( D F H S a t e l l i t e C o .L t d . , B e i j i n g 1 0 0 0 9 4 ,C h i n a )
Abs t r a c t : Co n s i de r i ng t h e ma s s da t a a nd c o mp l e x t y p e s o f t e s t d a t a f o r s a t e l l i t e c o n t r o l s y s t e m ,t h e a r t i i- f c i a l d i a g n o s t i c me t h o d ha s ma n y s h o r t a g e s s u c h a s t h e l o n g i nt e r p r e t i n g t i me a n d i na d e q u a t e o f di a g n o s t i c p r e c i s i o n. Th e t e s t d a t a a r e a na l y z e d a c c o r d i n g t o t he i r t r a n s f o r mi n g r u l e s ,a n d t he d i a g n o s t i c r u l e o f t e s t d a t a i s e s t a b l i s h e d . A ne w me t ho d i s o f f e r e d t o a u t o ma t i c a l l y d i a g no s e t e s t d a t a,a n d t h e c o r r e s p o n d i n g
高分三号卫星测控分系统设计与验证

高分三号卫星测控分系统设计与验证涂兰芬;刘久利;周丽萍;杨小勇;周波【摘要】高分三号(GF-3)卫星具有大角度快速机动及复杂电磁环境的特点,测控分系统常规设计难以满足卫星需求.文章提出射频设备的抗干扰设计及验证方法,介绍了GF-3测控分系统的设计、技术特点,并给出了地面试验及在轨运行验证结果,实现了测控分系统高灵敏度接收与大功率合成孔径雷达(SAR)之间复杂环境的电磁兼容性,同时首次采用高精度实时快速导航定位算法和自主健康管理方法,实现了导航子系统快速连续定位.%GF-3 satellite has the characteristics of a large angle attitude maneuver and complex electromagneticenvironment,conventional TT&C subsystem design is difficult to meet the satel-lite design requirement.The design and verification method of anti-jamming of radio frequency equipment is presented.The design,technical characteristics,ground experiment and verification results of GF-3 TT&C subsystem are introduced.The complex electromagnetic compatibility (EMC)between high sensitivity TT&C subsystem and high power SAR system is realized.At the same time,it is the first time to using the real-time positioning algorithm and self-health manage-ment to achieve the navigation subsystem fast and continuous positioning.【期刊名称】《航天器工程》【年(卷),期】2017(026)006【总页数】7页(P119-125)【关键词】高分三号卫星;测控分系统;长寿命;电磁兼容性【作者】涂兰芬;刘久利;周丽萍;杨小勇;周波【作者单位】北京空间飞行器总体设计部,北京 100094;北京空间飞行器总体设计部,北京 100094;北京空间飞行器总体设计部,北京 100094;北京空间飞行器总体设计部,北京 100094;北京空间飞行器总体设计部,北京 100094【正文语种】中文【中图分类】TN959.6随着空间技术的日益发展,遥感卫星装载的有效载荷呈现出多样化、复杂化的发展趋势,星载合成孔径雷达(SAR)作为一种稳定、高效的SAR图像获取手段受到了世界各国的高度重视,从美国发射全球第一颗SAR卫星——海洋卫星(Seasat)后,各国都分别制定了各自的星载SAR系统计划。
卫星航行控制与导航系统设计

卫星航行控制与导航系统设计卫星航行控制与导航系统是卫星上非常重要的组成部分,能够确保卫星精准地飞向指定轨道,按照预设路径顺利进行任务。
本文将从卫星航行控制与导航系统的作用、设计要素、技术难点以及发展前景等方面进行探讨。
一、卫星航行控制与导航系统的作用卫星航行控制与导航系统是指对卫星在空间中的位置、速度和加速度进行判断和计算,并通过推进剂的燃烧来精确控制卫星飞行。
卫星从发射到轨道稳定运行期间,其航迹需要进行复杂的动力学分析和不断调整,航行控制与导航系统的作用就是确保卫星在飞行过程中能够保持预设路线,达到在空间中执行任务的目标。
二、卫星航行控制与导航系统的设计要素(一)姿态控制在卫星的运行过程中,姿态控制是非常重要的。
姿态控制主要包括对卫星进行转动与定向,并能够在恼人干扰或天气异常等情况下维持稳定的飞行状态。
这需要卫星航行控制与导航系统具备一定的控制算法、传感器装置和执行机构。
(二)轨道控制卫星的轨道控制是卫星航行控制与导航系统的重要部分。
主要包括对卫星轨道进行预测、实时的轨道定位和控制调整。
该功能需要卫星航行控制与导航系统具备精确的观测与测量手段、多源数据的信息集成和处理以及反馈控制算法等。
(三)星上自主导航星上自主导航是实现卫星空间控制的重要手段,是指卫星具备对所处空间所进行的自动飞行控制。
这既能够有效减轻卫星测控站的工作负担,也能较好地适应卫星飞行控制的实时性、高精度性和自主性的要求。
三、技术难点在卫星航行控制与导航系统的设计中,还存在一些技术难点,包括精准地航迹控制、卫星姿态稳定控制、复杂环境下飞行控制等。
随着卫星导航与控制需求的不断提高,这些技术难点也在不断攻克。
(一)精准地航迹控制精准地控制卫星的飞行航迹是卫星航行控制与导航系统的核心目标之一。
需要通过对卫星飞行的复杂动力学模型进行分析与模拟,优化控制算法,提高推进剂的燃烧精度,才能使卫星能够在空间中准确飞行,满足各种应用需求。
(二)卫星姿态稳定控制卫星的姿态稳定控制是卫星航行控制与导航系统设计的重要环节。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
遥控技术
➢ 通过对遥测参数、姿态和轨道参数的 研究和分析,发现航天器的轨道、姿 态、某个工程分系统或有效载荷工作 状况异常或出现故障,判断出故障部 位和做出决策,向卫星发出有关命令 ,修正轨道和姿态,调整分系统和有 效载荷的运行参数,甚至切换备份或 部件。
2020/7/21
17
测控频段
短波 超短波
微
波
波段
高频HF 甚高频VHF 特高频UHF
L波段 S C X Ku K Ka
毫米波
频率
3~30MHz 30~300MHz 300~1000MHz
1~2GHz 2~4GHz 4~8GHz 8~12GHz 12~18GHz 18~27GHz 27~40GHz 40~300GHz
测控系统组成
遥控天线1 合
遥控天
成
线2
器
1 组成
扩频应答
输机A入来自多扩频应答工
机B
器 USB应答机
遥测天线1
遥测天线2
功 分路器
分
负载
测控 开关
器
输
出
测控固放1
多
测控固放2
工
器
测控固放3
6)遥测和遥控原理方框图
14
测控特性
卫星测控特点
多路传输
精确性和 可靠性
信息的多 样性和数 据处理的 复杂性
1 几个概念
跟踪测轨:地面站跟踪卫星并测出其飞行轨道 遥测:采集或获取卫星工况或工程参数,并通过无线信道传 输到地面,以便地面及时了解卫星的工作状况 遥控:将地面的控制信息或数据通过无线信道发送给卫星, 以实现地面对卫星的控制 上行:遥控指令+数据注入 下行:遥测(工况信息)、数传(载荷或科学数据) 测控(TT&C, Tracking, Telemetry and Command)包括三 部分:跟踪、遥测和命令。 数传、测控的区别 地面测控站、船,飞行控制中心(北京、西安 )
➢ 测距:由地面站发射出一个高频率稳定度和高频谱纯度的正弦副 载波(称为测距侧音),发射到航天器后,再转发回来和原来地 面发出的侧音比较相位差,可计算出航天器和地面站之间的距离 。
➢ 根据得到的(A, E, R, ,t)即可确定航天器在三维空间中的瞬时位置 。对于惯性目标,跟踪足够长弧段后,可预测外推未来轨道。
第五讲 卫星测控分系统设计
上海微小卫星工程中心—林宝军 2014年3月4日
1 任务
➢ 航空航天分界线,一般以距离地 面100km为界
➢ 广义的测控系统是航天技术的大 系统之一,包括航天器本体中的 测控通信系统和地面通讯设备( 运载与航天器测控网)。
➢ 任务: 建立卫星与地面之间的 无线传输通道。 ▪ 天地通讯 ▪ 轨道测量
波长 100~10m
10~1m 1~0.3m 30~15m 15~7.5m 7.5~7.35m 3.75~2.5m 2.5~1.67m 1.67~1.11m 1.11~0.75m 0.75~0.1m
测控协议 ➢数据率小于12Mb/s, 采用S频段 ➢数据率在12~50Mb/s, 采用C频段或X频段 ➢数据率50~100Mb/s, 采用X频段 ➢数据率100~1000Mb/s,采用Ku/Ka/w频段 ➢数据率大于1Gb/s, 采用光频段
➢ 遥控指令动作的结果,再通过遥测信 道传到地面站进行回报证实。
➢ 遥测和遥控两种技术综合起来构成一 种保证航天器正常运行,增加可靠性 ,延长寿命的重要闭环手段。
测控技术发展的四个阶段
1. 测控设备独立发展时期:跟踪设备、遥测设备、遥控设备、电 视和语音设备独立发展,各有自己的载频、天线和收发设备。 1965年前基本上处于这种状态,设备庞大、众多,操作复杂。
遥测技术
➢ 用传感器测量航天器内部各个 工程分系统、航天器的姿态、 外部空间环境和有效载荷的工 作状况,用无线电技术,将这 些参数传到地面站,供地面的 科研人员进行分析研究,用来 判断航天器的工作状况。
➢ 遥测是一种用来监督、检查航 天器上天后工作状况的唯一手 段,也是判断故障部位、原因 的唯一措施。
测控功能
1 功能
满足飞行程序要求,在卫星全寿命期间各个阶段,包括 主动段、转移轨道和工作轨道,接收地面遥控指令和注 入数据,执行直接指令,同时下发遥测数据,遥测数据 下发的开始和结束由地面测控覆盖范围确定; 完成实时遥测帧的组帧下发和延时遥测帧的组帧存储下 发; 满足各分系统对遥控指令、注入数据和实时延时遥测的 需求; 配合地面测控系统完成对卫星的跟踪、测距、测轨、遥 测、遥控; 提供整星校时功能;
2. 统一载波时期:从1965年后逐步形成了跟踪、遥测、遥控和语 音的传输共用一个载频,构成了S波段统一载波测控系统(USB) ,达到了简化天-地设备的效果。
3. 1980年前后,TT&C和宽带、高速数据通信系统合并成C&T(通 信与跟踪)系统。
4. 由陆(海)基的测控与通信网转向建立天基测控与通信网: 采 用陆(海)基的测控与通信网,需要在全球范围内建站才能满足 载人航天任务的覆盖要求;而天基测控与通信网主要通过跟踪 与数据中继卫星系统(TDRSS),在地面上布一个站就能完成覆 盖全轨道飞行任务。
涉及科学技 术领域的广 泛性
16
2 测控特性
航天器的测控特性一般应包括(以往的测控包括遥测、 遥控和跟踪,目前已发展成为仅仅是提供通道):
测控选用的频段一般为(S、C、Ku、Ka); 天线的增益; 轨道测速精度和测距精度;特别是低轨道,对目 标观测有定位精度要求的任务(实时和事后处理)航天 器,定轨精度指标有的情况是直接影响到目标定位精度。 上行码速率;它主要涉及到地面测控站发送遥控 和注入数据的能力。 下行码速率;它是航天器在轨工作时的各种工程 测量参数的发送能力。
跟踪技术
➢ 跟踪:利用航天器发出到达地球的载波,跟踪站检测出电磁波来 波取向和地面站天线主波束指向角的偏差,伺服系统利用此偏差 随时校正,消除偏差,而达到天线主波束实时对准不断运动着的 航天器的目的。
➢ 测速:利用航天器相对于地面站天线的相对运动、信标机的载频 中产生出多普勒频移,测出频移可换算出径向速度。
测控体制
技术指标
USB(五院)
非相干扩频
扩跳频
测控数传一体化 上下行数传(中科院)
上行带宽
±1MHz
±11MHz
±50MHz
±11MHz