第6章--金属及合金的塑性变形与断裂..
材料科学基础习题与参考答案(doc14页)完美版
材料科学基础习题与参考答案(doc14页)完美版第⼀章材料的结构⼀、解释以下基本概念空间点阵、晶格、晶胞、配位数、致密度、共价键、离⼦键、⾦属键、组元、合⾦、相、固溶体、中间相、间隙固溶体、置换固溶体、固溶强化、第⼆相强化。
⼆、填空题1、材料的键合⽅式有四类,分别是(),(),(),()。
2、⾦属原⼦的特点是最外层电⼦数(),且与原⼦核引⼒(),因此这些电⼦极容易脱离原⼦核的束缚⽽变成()。
3、我们把原⼦在物质内部呈()排列的固体物质称为晶体,晶体物质具有以下三个特点,分别是(),(),()。
4、三种常见的⾦属晶格分别为(),()和()。
5、体⼼⽴⽅晶格中,晶胞原⼦数为(),原⼦半径与晶格常数的关系为(),配位数是(),致密度是(),密排晶向为(),密排晶⾯为(),晶胞中⼋⾯体间隙个数为(),四⾯体间隙个数为(),具有体⼼⽴⽅晶格的常见⾦属有()。
6、⾯⼼⽴⽅晶格中,晶胞原⼦数为(),原⼦半径与晶格常数的关系为(),配位数是(),致密度是(),密排晶向为(),密排晶⾯为(),晶胞中⼋⾯体间隙个数为(),四⾯体间隙个数为(),具有⾯⼼⽴⽅晶格的常见⾦属有()。
7、密排六⽅晶格中,晶胞原⼦数为(),原⼦半径与晶格常数的关系为(),配位数是(),致密度是(),密排晶向为(),密排晶⾯为(),具有密排六⽅晶格的常见⾦属有()。
8、合⾦的相结构分为两⼤类,分别是()和()。
9、固溶体按照溶质原⼦在晶格中所占的位置分为()和(),按照固溶度分为()和(),按照溶质原⼦与溶剂原⼦相对分布分为()和()。
10、影响固溶体结构形式和溶解度的因素主要有()、()、()、()。
11、⾦属化合物(中间相)分为以下四类,分别是(),(),(),()。
12、⾦属化合物(中间相)的性能特点是:熔点()、硬度()、脆性(),因此在合⾦中不作为()相,⽽是少量存在起到第⼆相()作⽤。
13、CuZn、Cu5Zn8、Cu3Sn的电⼦浓度分别为(),(),()。
(整理)第6章金属及合金的塑性变形
第6章 金属及合金的塑性变形6-1 金属的变形特性金属在外力作用下的变形行为可用拉伸曲线来描述。
设拉力为P ,试样伸长量为dl ,则应力σ和应变ε分别为:A P σ=; ldl ε= 式中,A 为试样的截面积。
在拉伸过程中,A 和l 是变化的,在工程上,为了简化问题,A 常用A 0来代替,ε也用平均值表示ε=(l -l 0)/l 0,这样测得的σ-ε曲线称工程σ-ε曲线。
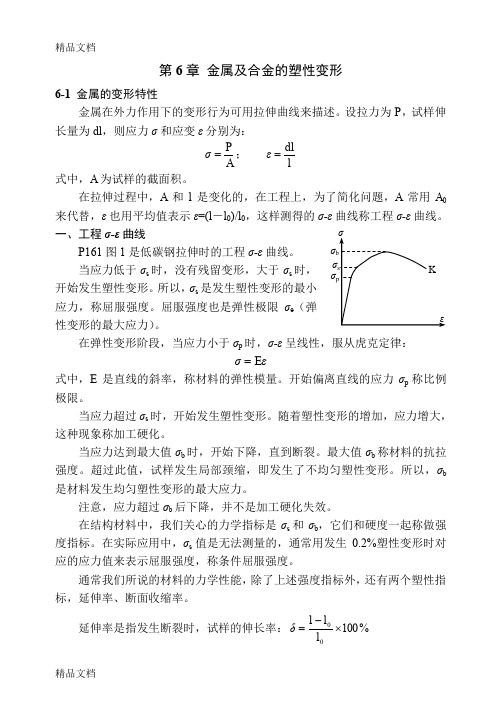
一、工程σ-ε曲线P161图1是低碳钢拉伸时的工程σ-ε曲线。
当应力低于σs 时,没有残留变形,大于σs 时,开始发生塑性变形。
所以,σs 是发生塑性变形的最小应力,称屈服强度。
屈服强度也是弹性极限σe (弹性变形的最大应力)。
在弹性变形阶段,当应力小于σp 时,σ-ε呈线性,服从虎克定律: εE σ=式中,E 是直线的斜率,称材料的弹性模量。
开始偏离直线的应力σp 称比例极限。
当应力超过σs 时,开始发生塑性变形。
随着塑性变形的增加,应力增大,这种现象称加工硬化。
当应力达到最大值σb 时,开始下降,直到断裂。
最大值σb 称材料的抗拉强度。
超过此值,试样发生局部颈缩,即发生了不均匀塑性变形。
所以,σb 是材料发生均匀塑性变形的最大应力。
注意,应力超过σb 后下降,并不是加工硬化失效。
在结构材料中,我们关心的力学指标是σs 和σb ,它们和硬度一起称做强度指标。
在实际应用中,σs 值是无法测量的,通常用发生0.2%塑性变形时对应的应力值来表示屈服强度,称条件屈服强度。
通常我们所说的材料的力学性能,除了上述强度指标外,还有两个塑性指标,延伸率、断面收缩率。
延伸率是指发生断裂时,试样的伸长率:%10000⨯-=l l l δσσ断面收缩率是指发生断裂时,试样截面积的变化率:%10000⨯-=A A A ψ 二、真应力-真应变曲线(T T εσ-曲线) 工程应力与真实应力之间的不同是容易发现的。
下面看看工程应变与真实应变的不同。
拉伸一个试样,使其伸长一倍,则工程应变1/)2(000=-=l l l ε;若是压缩,要获得同样数值的负应变,理应压缩到原长度的一半。
第6章材料的塑性变形
§6.2.2 孪生
晶体塑性变形的另一种常见方式。
指在切应力作用下,晶体的一部分沿一定的晶面(孪生面)和一定的 晶向(孪生方向)相对于另一部分发生均匀切变的过程。
27
§6.4.2 多相合金的塑性变形
塑性变形取决于:
①基体相性质
②第二相的性质、形状、大小、数量和分布等 ——在塑性变形中往往起着决定性作用
常按第二相的尺度大小将其分为两大类: 聚合型:第二相尺寸与基体相尺度属同一数量级,如图1所示; 弥散型:第二相尺寸非常细小,并且弥散分布于基体相中,如图2所示。
①位错运动的阻力首先来自于点阵阻力,派尔斯(Peierls)和纳巴罗( Nabarro)首先估算了这个力,所以又称为派-纳力(P-N力),它相当于简单立 方晶体中刃型位错运动所需要的临界分切应力:
式中:d为滑移面的面间距,b为滑移方向上的点阵间距,ν为泊松比。 采用上式,我们可以简单推算晶体的切变强度,对于简单立方结构,存在d = b,对 金属,取ν =0.3,可得τP-N=3.6×10-4G,比刚性模型理论计算值(约G/30)小得多, 接近临界分切应力实验值。
图1 聚合型合金组织-Al青铜
图2 弥散型第二相合金组织-铁黄铜
§6.4.2 多相合金的塑性变形
(1)聚合型两相合金的塑性变形
对聚合型两相合金而言,如果两个相都具有塑性,则合金变形阻力决定 于两相的体积分数。
σ m = f1σ 1 + f2σ 2
ε m = f1ε 1 + f2ε 2
上式f1、f2分别为两个相的体积分数,σ 1、σ 2分别为两个相在此应变时
金属学
为简单,考虑λ=90° 为简单,考虑λ=90°-φ,即滑移 λ=90 面法线、滑移方向、外力轴在同一 平面上,则: cosλcosφ=cos(90°-φ)cosφ cosλcosφ=(1/2)sin2φ φ=45°,(cosλcosφ) =1/2, φ=45°,(cosλcosφ)max=1/2, cosλcosφ τ最大。这样的滑移系启动时所需 最大。 外力最小,最易滑移。 外力最小,最易滑移。
(2)对有多组滑移பைடு நூலகம்的晶体:多个滑移系滑移。 )对有多组滑移面的晶体:
5、多系滑移 多系滑移: 多系滑移:在两个或更多个滑移系上同时或交替 进行的滑移。 进行的滑移。 出现在: 出现在:外力轴和几个滑移系构成的取向因子相 同(称等效滑移系),分切应力同时达到临界值。 多个等效滑移系各自作独立的滑移。 滑移线:呈交叉、曲折形状。 滑移线:
3、滑移所需的临界分切应力 滑移面的面积=A/cosφ 外力在滑移方向上的分力为Fcosλ,
外力在滑移面上沿滑移方向的分切应 力:
式中:F/A为正应力; cosλcosφ为取向因子(Schmidt)。 式中: 看出: 看出:外力和截面一定,作用于滑移系上的分切应力只与晶体 的受力方位(λ、φ)有关。当某一滑移系的取向因子大时,作 用在该滑移系的分切应力也大。
2、滑移的晶体学特征(滑移系) 滑移的晶体学特征(
滑移面:能够发生滑移的晶面( 滑移面:能够发生滑移的晶面(原子密度最大或次大的晶 面)。 滑移方向:在滑移面上能够进行滑移的方向( 滑移方向:在滑移面上能够进行滑移的方向(原子密度最 大的方向)。 大的方向)。 原因: 原因: 原子面密度最大,其面间距大,原子面间结合力小。位错 滑移所需加的临界切应力小,位错易发生移动; 原子密度最大的方向, 原子列间距大,原子列间 结合力小。
有色金属压力加工原理考试复习资料(题)
有色金属压力加工原理绪论1、★★★金属压力加工与切削加工、铸造等方法相比,具有哪些主要优点?答:1、可改善金属的组织和性能2、因无(少)废屑,可节约大量的金属3、上产率高4、产品规格多2、金属压力加工方法主要有哪些?答:1、锻造分自由锻和模锻2、轧制分纵扎、横轧和斜扎3、挤压分正挤压和反挤压4、拉伸★★★★名词解释:锻造:利用外力,通过工具或模具使金属变形的加工方法。
轧制:坯料通过两个旋转轧辊间的特定空间(平的或成型的),以获得一定截面形状的产品的加工方法。
挤压:对挤压筒内的锭坯一端施加压力,使其通过模空以实现塑性变形的方法。
拉伸:对金属坯料一端施加压力,使其模孔产生塑性变形的加工方法。
3、塑性成形方法轧制(纵扎)、拉拔、正挤压、反挤压和镦粗?P3 图第一章金属压力加工的力学和热力学条件1-1 力和应力4、★★什么叫做外力?以及外力分类?答:在压力加工过程中,作用在金属表面上的力,叫做外力。
外力分为作用力和约束反力作用力:它是使金属产生塑性变形的力,也称为主动力。
约束反力:工件在主动力作用下,其运动受到工具阻碍而产生的力,成为约束反力。
5、★★什么叫做内力?什么是第一种内力和第二种内力?答:由外力而引起金属内各质点间产生相互作用的力,成为内力。
第一种内力:为平衡外力的机械作用将产生内力,这是第一种内力。
第二种内力:在某些条件下,由于金属工件各部分变形的大小不同,在金属内部产生的自相平衡的内力,称为第二种内力。
6、★什么叫做应力?分类和单位?答:在外力作用下,金属内部产生了内力,单位面积上的内力称为应力。
分为正应力(垂直分量)和切向应力(切向分量)。
帕Pa和兆帕MPa 1MPa=10^6Pa=0.1kg/mm^2=1N/mm^21-2 应力状态和变形状态7、★什么是金属处于应力状态?答:所谓金属处于应力状态就是金属内的原子被迫偏离其平衡位置的状态。
8、★★★绘制应力状态图P079、★什么是主应力状态、主应力、主平面、主切平面、主切应力?答:金属在实际变形过程中,存在着这样的应力状态,即在变形区某点的单元六面体上只作用着正应力,没有切应力,我们把这样的应力状态称之为主应力状态。
石德珂《材料科学基础》考点精讲6

八、包申格效应
材料经预先加载产生少量塑性变形(小于 4%),而后同向加载则 σe升高,反向加载则 σe下降,此 现象称为包申格效应。
考点二:滑移和孪生(重要等级 ★★★★★)
[复习思路]掌握
金属发生塑性变形的主要方式 滑移和孪生的概念 滑移和孪生的异同点
滑移
{ 金属塑性变形的主要方式 孪生 晶界滑动(高温下) 滑移带—把试样抛光,适量的塑性变形后,在宏观或光学显微镜下看到的试样表面上平行或交叉 的细线。 滑移线—在电子显微镜下,可以看到滑移带是由更多的一组平行线组成,称为滑移线。
各向同性。
对于 α Fe多晶体其 E为 211400MN/m2
七、弹性模量在工程上的应用
对零(构)件进行刚度设计
σ
=
F A
=Eε→
F ε
=EA
EA(GA),代表零件的刚度,产生单位弹性应变所需载荷的大小。
在其它条件相同时,金属的弹性模量愈高,制成的零件或构件的刚度便愈高,即在外力作用时,保
持其固有形状、尺寸的能力愈强。
2.位错运动的点阵阻力
(1)位错的宽度
{越窄 界面能越低
位错宽度
→平衡宽度
越窄 单位体积弹性畸变能高
刃型位错的形成 刃型位错原子模型
偏离 =b/4(柏氏矢量)时,叫位错宽度 (2)位错运动的点阵阻力 晶体的滑移必须有外力作用→ 位错运动要克服阻力 →位错运动的阻力首先来自的点阵阻力
弹性变形是塑性变形的先行阶段,在塑性变形中还伴生着一定的弹性变形。可以从原子间结合
力的角度了解其物理意义。
发生弹性变形的难易程度取决于作用力 -原子间距曲线的斜率 S0
— 167—
S0 =ddFr=dd2ru2 σ =Sr00ε E =S0
金属变形特性
思考:为什么会出现屈服现象?
金属变形特性
16
塑性变形过程--屈服
屈服强度:表示材料对
开始发生微量塑性变形
的抗力,也称为屈服极
限,用σs表示。对具有 屈服现象的材料用屈服
现象发生时对应的应力
表示;对屈服现象不明
显的材料,则以所产生
的塑性应变变0.2%时的
应力值表示。
金属变形特性
17
塑性变形过程--均匀变形
21
塑性变形过程--断裂
脆性断裂:断裂前因并未经过明显塑性变形,故其断口 常具有闪烁的光泽,这种断裂叫“脆性断裂”。脆性断 裂可沿晶界发生,称为“晶间断裂”,断口凹凸不平; 脆性断裂也可穿过各个晶粒发生,称为“穿晶断裂”, 断口比较平坦。
金属变形特性
沿晶脆性断口 22
➢ 材料的最大弹性变形量随材料的不同而不同。
金属变形特性
10
弹性模量
在弹性变形范围内,应力与应变服从虎克定律。
式中,σ、τ分别为正应力和 σ
切应力,ε、γ分别为正应变和
切应变;比例系数E称为弹性
模量(杨氏模量),G称为切 σe
变模量,它反映材料对弹性变
形的抗力,代表材料的“刚
度” 。
o
ε
金属变形特性
11
弹性模量代表着使原子离开平衡位置的难易程度,是 表征晶体中原子间结合力强弱的物理量。
弹性模量是表征材料在发生弹性变形时所需要施加力 的大小。
在给定应力下,弹性模量大的材料只发生很小的弹性 应变,而弹性模量小的材料则发生比较大的弹性应变。
结合能是影响弹性模量的主要因素,结合键之间的结 合键能越大,则弹性模量越大,结合键能与弹性模量 之间有很好的对应关系。
金属变形特性
第六章 金属和合金的塑性变形
第六章 金属和合金的塑性变形和再结晶金属材料(包括纯金属和合金)在外力的作用下引起的形状和尺寸的改变称为变形。
去除外力,能够消失的变形,称弹性变形;永远残留的变形,称塑性变形。
工业生产上正是利用塑性变形对金属材料进行加工成型的,如锻造、轧制、拉拔、挤压、冲压等。
塑性变形不仅能改变工件的形状和尺寸,还会引起材料内部组织和结构的变化,从而使其性能发生变化。
以再结晶温度为界,金属材料的塑性变形大致可分为两类:冷塑性变形和热塑性变形,在生产上,通常称为冷加工和热加工。
经冷塑性变形的金属材料有储存能,自由能高,组织不稳定。
若升高温度,使原子获得足够的扩散能力,则变形组织会恢复到变形前的状态,这个恢复过程包括:回复、再结晶和晶粒长大三个阶段。
从金属材料的生产流程来看,一般是先进行热加工,然后才进行冷加工和再结晶退火。
但为了学习的方便,本章先讨论冷加工,再讨论再结晶和热加工。
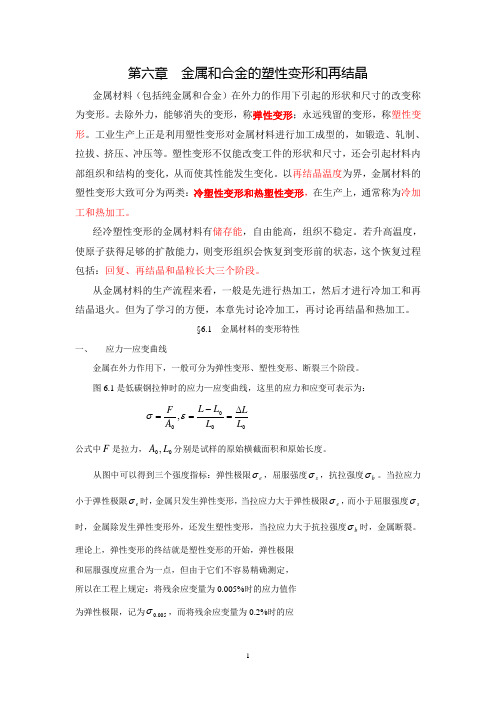
§6.1 金属材料的变形特性一、 应力—应变曲线金属在外力作用下,一般可分为弹性变形、塑性变形、断裂三个阶段。
图6.1是低碳钢拉伸时的应力—应变曲线,这里的应力和应变可表示为:000,L L L L L A F ∆=-==εσ 公式中F 是拉力,00,L A 分别是试样的原始横截面积和原始长度。
从图中可以得到三个强度指标:弹性极限e σ,屈服强度s σ,抗拉强度b σ。
当拉应力小于弹性极限e σ时,金属只发生弹性变形,当拉应力大于弹性极限e σ,而小于屈服强度s σ时,金属除发生弹性变形外,还发生塑性变形,当拉应力大于抗拉强度b σ时,金属断裂。
理论上,弹性变形的终结就是塑性变形的开始,弹性极限和屈服强度应重合为一点,但由于它们不容易精确测定,所以在工程上规定:将残余应变量为0.005%时的应力值作为弹性极限,记为005.0σ,而将残余应变量为0.2%时的应力值作为条件屈服极限,记为2.0σ。
s σ和2.0σ都表示金属产生明显塑性变形时的应力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(三)形变织构
在冷变形时,不同位向的晶粒随着变形程 度的增加,在先后进行滑移过程中其滑移系 逐渐趋于受力方向转动。 而当变形达到一定程度后,各晶粒的取向 基本一致,该过程称为择优取向,而变形金 属产生择优取向的结构,称为形变织构。
形变织构随加工变形方式不同主要有两种 类型: 拔丝形成丝织构,其特征为各晶粒的某一 晶向大致与拔丝方向平行; 轧板时形成板织构,其主要特征为各晶粒 的某一晶面和晶向分别趋于同轧面与轧向 平行。
主要教学内容
(1)拉伸曲线及其所反映的常规机械性能指标; (2)塑性变形的宏观变形规律与微观机制; (3)加工硬化的本质及实际意义; (4)塑性变形对金属与合金组织、性能的影响: (5)金属材料的强化机制。
§6.1 金属的变形特性
一、工程应力-应变曲线
二、真应力-应变曲线
三、金属的弹性变形
一、工程应力-应变曲线
教学目的: 1 阐明金属塑性变形的主要特点及本质; 2 指出塑性变形对金属组织和性能的影响; 3 揭示加工硬化的本质与意义。 重点: (1)塑性变形的宏观变形规律与微观机制 (2)晶体缺陷对塑性变形的影响; (3)金属塑性变形后的组织与性能; (4)加工硬化的本质及实际意义,残余应力;
难点:
(1)塑性变形的位错机制 (2)形变织构与纤维组织的差别 。
对纯金属、单相合金或低碳钢都发现室 温屈服强度和晶粒大小有以下关系:
s 0 kd
1 2
式中的d为晶粒的平均直径,k为比例常 数。这是个经验公式,但又表达了一个 普遍规律。该公式常称为霍尔-佩奇(HallPetch)关系。
细晶强化是强化金属材料的一种 极为重要的方法 ! 仅可以提高材料的强度吗?
2、脆性第二相呈片状或层状分布在塑性 基体上 如钢中珠光体组织,此时,材料性能与 两相片层间距有关,也可用霍尔-佩奇公式 描述:
s i k s
1 2 s 0
3、脆性相在塑性相中呈颗粒状分布
当脆性相在塑性相中呈颗粒状分布时,会 使强度降低,而塑性和韧性得到显著改善; 若第二相以细小弥散的微粒均匀分布于基体 相中时,则会产生显著的强化作用。第二相 粒子的强化作用是通过其对位错运动的阻碍 作用而表现出来的。这又分两种情况: 第二相粒子的强化!!
工程意义:所以在工业上通过各种方法(凝固、 压力加工、热处理)使材料获得细而均匀的晶 粒,使目前提高材料力学性能的有效途径之 一。
§6.4合金的塑性变形
一、单相固溶体的塑性变形
二、多相合金的塑性变形
一、单相固溶体的塑性变形
单相固溶体合金中存在溶质原子。 溶质原子对合金塑性变形的影响主要表现在固 溶强化作用,提高了塑性变形的阻力。溶质原 子的存在及其固溶度的增加,使基体金属的变 形抗力随之提高。
(二)亚结构的变化
金属晶体在塑性变形的过程中由于应力的作用 而使位错不断增殖,同时晶粒的碎化也将产生大 量位错。 因此,随变形度的增大,晶体中位错密度迅速提 高。一般金属经剧烈冷变形后,其位错密度可由 变形前的106~107/cm2(退火态)增至 1011~1012/cm2。
金属经一定量的塑性变形后,晶粒中的位错 线通过运动与交互作用,开始呈现纷乱的不均 匀分布,形成位错缠结; 进一步增加变形度时,大量位错发生聚集, 并由缠结的位错组成胞状亚结构。 随变形度增加,变形胞数量增多、尺寸减小。
三、金属的弹性变形 σ=E 弹性模量越大,弹性变形越不容易!! 弹性 模量是决定材料刚度的材料性能. 弹性模量的大小主要取决于原子间的结 合力,而与材料内部组织结构无关,即属 于结构不敏感的性能
§6.2单晶体的塑性变形
晶体只有在切应力作用下才发生塑性变形。
塑性变形方式:滑移或孪生 一、滑移 二、孪生
从此曲线上,可以看出低碳钢的变形过程有如下 特点: 当应力低于σe 时,应力与试样的应变成正比, 应力去除,变形消失,即试样处于弹性变形阶段, σe 为材料的弹性极限,它表示材料保持完全弹性 变形的最大应力。
当应力超过σe 后,应力与应变之间的直线关系 被破坏,并出现屈服平台或屈服齿。如果卸载, 试样的变形只能部分恢复,而保留一部分残余 变形,即塑性变形,这说明钢的变形进入弹塑 性变形阶段。σs称为材料的屈服强度或屈服点, 对于无明显屈服的金属材料,规定以产生0.2% 残余变形的应力值为其屈服极限。
多晶体的塑性变形特点:
1.各晶粒变形的 3.各晶粒变形的不均匀性;
二、晶粒大小的影响
多晶体由不同取向的晶粒组成,塑 性变形时,晶粒取向不同,故滑移时, 晶粒之间会相互制约、相互影响(位错 交割)。晶界处位错受阻,以上两者均能 提高材料的强度!------细晶强化
单晶体滑移时,往往伴随晶体的转动。
5、多系滑移 滑移在多组滑移系中同时进行或交替进行。 6、滑移的位错机制
(1)位错运动与晶体滑移 利用刚性滑移计算出的金属的屈服强度值与实测 值有较大的差异,说明金属的滑移不是刚性滑移 ,而是利用金属中的位错进行的。
(2)位错的增殖
在晶体滑移过程中,存在着位错不断增殖的 现象,典型的如弗兰克-瑞德位错源机制。
沈阳理工大学应用技术学院
金属学及热处理
授课教师:杨秀英
第6章 金属及合金的塑性变形与断裂
引言
为什么探讨金属及合金塑性变形?意义?
铸态组织---(铸件和铸锭)---压力加工(轧制 、锻造、挤压等)---型材和工件
经过压力加工后,不仅材料的形状和尺寸 发生变化,组织和性能也发生相应的变化
强度、硬度、塑性、韧性或断裂
一方面可以揭示金属材料强度和塑 性的实质,以探讨强化金属材料的方法和 途径; 另一方面为工程实际中的塑性变形问 题提供重要的线索和参考,作为改进工艺 或提高加工质量的依据.
§6.1金属的变形特性 §6.2单晶体的塑性变形 §6.3多晶体的塑性变形 §6.4合金的塑性变形 §6.5塑性变形对金属组织和性能的影响 §6.6金属的断裂
固溶强化的定义??
固溶强化是提高材料强度的另一重要手段
不同溶质原子所引起的固溶强化效果 存在很大差别!! (1)在固溶体的溶解度范围内,溶质的质 量分数越大,强化作用越大。 (2)溶质原子与基体金属的原子尺寸相 差越大,强化作用也越大。 (3)间隙型溶质原子比臵换原子具有较 大的固溶强化效果。 (4)溶质原子与基体金属的价电子数相 差越大,固溶强化作用越显著。
工程应用: 不利的(大部分)和有利的 不利的现象: 制耳现象
如有织构的金属板材冲制筒形零件时,由于不 同方向上塑性的差别较大,深冲之后零件的边缘不 齐出现“制耳”
§6.3多晶体的塑性变形
一、多晶体的塑性变形过程
二、晶粒大小的影响
一、多晶体的塑性变形过程
实际使用的材料通常是由多晶体组成的 多晶体的塑性变形较为复杂!! 多晶体中每个晶粒变形的基本方式与单晶体 相同(??),但由于相邻晶粒之间取向不同,以 及晶界的存在,因而多晶体的变形既需克服 晶界的阻碍,又要求各晶粒的变形相互协调 与配合!
滑移:晶体一部分沿一定晶面和一定晶向与 另一部分产生相对滑动。 1、滑移带与滑移线 单晶体表面变形是所显示的滑移条纹,称 为滑移带(金相显微镜),而滑移带又是由一 簇相互平行的滑移线(电子显微镜)组成。
2、滑移系 滑移是晶体一部分沿一定晶面和一 定晶向与另一部分产生相对滑动。 滑移面是晶体中原子排列最紧密的面, 而滑移方向是原子排列最紧密的方向。
(1)位错绕过第二相粒子
(2) 位错切过第二相粒子
§6.5塑性变形对金属组织和性能的影响
一、塑性变形对组织结构的影响 二、塑性变形对金属性能的影响 三、残余应力
一、塑性变形对组织结构的影响
(一)显微组织的变化
(二)亚结构的变化
(三)变形织构
(一)显微组织的变化
经塑性变形后,金属材料的显微组织发 生明显的改变。 除了每个晶粒内部出现大量的滑移带或孪 晶带外,随着变形度的增加,原来的等轴晶 粒将逐渐沿其变形方向伸长。当变形量很大 时,晶粒变得模糊不清,晶粒已难以分辨而 呈现出一片如纤维状的条纹,称为纤维组织。 纤维的分布方向即是材料流变伸展的方向。
二、多相合金的塑性变形
(一)合金中两相性能相近
(二)合金中两相性能相差较大
(一)合金中两相性能相近 当组成合金的两相含量相差不大,晶粒 尺寸属同一数量级,且都为塑性相时,则 合金的变形能力取决于两相的体积分数。
(二)合金中两相性能相差较大
1、硬而脆的第二相呈连续网状分布在 塑性相的晶界上 这种情况最恶劣,会使合金塑性与韧 性急剧下降。 生产上可以通过热加工和热处理相互 配合来破坏或消除网状分布。
(3)位错的交割与塞积
不同滑移面上运动着的位错相遇时,发生互相 交割并形成割阶,这一方面增加位错线长度,另 一方面可能形成一种位错难以运动的固定割阶, 成为后续位错运动的阻碍。 在切应力作用下,弗兰克-瑞德位错源产生的大 量位错沿滑移面的运动过程中,若遇到障碍物( 固定位错、杂质粒子、晶界等),领先位错在障 碍前被阻止,后续位错被堵塞起来,形成位错塞 积。
强度? 塑性? 韧性?
二、真应力-应变曲线
真应力-真应变曲线,它不像应力-应变曲 线那样在载荷达到最大值后转而下降,而是 继续上升直至断裂,这说明金属在塑性变形 过程中不断地发生加工硬化,从而外加应力 必须不断增高,才能使变形继续进行,即使 在出现缩颈之后,缩颈处的真实应力仍在升 高,这就排除了应力-应变曲线中应力下降的 假象。
塑性材料的晶粒愈细,不仅强度愈高,而且塑 性与韧性也较高。 原因:因为晶粒愈细,单位体积中晶粒数量便 愈多,变形时同样的形变量便可分散在更多的 晶粒中发生,晶粒转动的阻力小,晶粒间易于 协调,产生较均匀的变形,不致造成局部的应 力集中,而引起裂纹的过早产生和发展。因而 断裂前便可发生较大的塑性形变量(伸长率大), 吸收更多的能量,具有较高的冲击载荷抗力(韧 性好)。