鼠标曲面点云数据处理及快速原型制作研究
从点云创建曲面
从点云创建曲面需要的模块:你必须用下面的模块完成此操作指南:点操作、曲面,图元评估(即Point Processing, Surfacing, Evaluation.)这个指南是快速构建曲面。
通过点云创建曲面有很多种方式。
此指南你将学会Imageware中最常用的一种基础工具。
My friends! For you for me, for all the people—for china~!Let's get started!开始这个指南之前你需要完成一些设置。
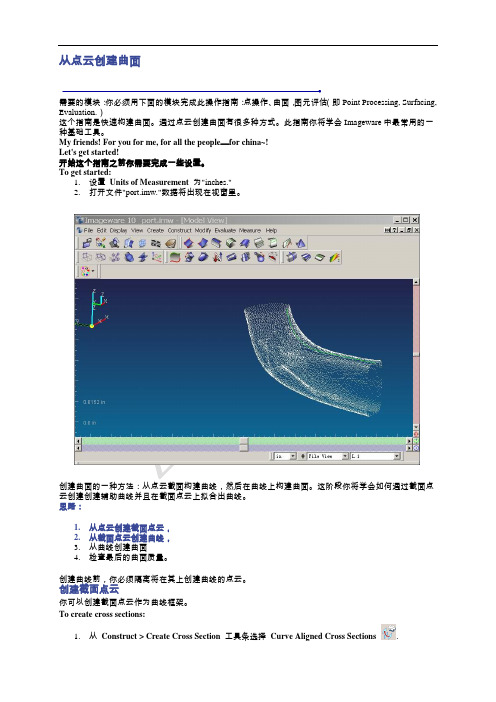
To get started:1.设置Units of Measurement为"inches."2.打开文件"port.imw."数据将出现在视窗里。
创建曲面的一种方法:从点云截面构建曲线,然后在曲线上构建曲面。
这阶段你将学会如何通过截面点云创建创建辅助曲线并且在截面点云上拟合出曲线。
思路:1.从点云创建截面点云,2.从截面点云创建曲线,3.从曲线创建曲面4.检查最后的曲面质量。
创建曲线前,你必须隔离将在其上创建曲线的点云。
创建截面点云你可以创建截面点云作为曲线框架。
To create cross sections:1.从Construct > Create Cross Section工具条选择Curve Aligned Cross Sections.确信数据显示在最佳视角。
本人推荐使用对齐视图到点云:View|Align View To|Cloud. 3. 指定截面类型为 View Aligned (使截面垂直于当前视图,而截面中心在曲线上) 4. 设置截面数为20.(将可能得到20条截面点云)5. 设置截面宽度为 1.65. 接受默认的neighborhood size.(相邻点间的尺寸)6. 点击 Apply 创建了新点云CrvAlignSectCld.1 – 曲线"Seam"2 – 从点云创建的截面点云 "port" 和曲线 "seam"从截面点云创建曲线从点云创建曲线有许多方法,这里将使用Uniform Curve 功能。
基于Geomagic stuido的残缺点云面片数据修复研究——以某型汽车配件为例
基 于 Ge o ma g i c s t u i d o的残缺点 云面片数据 修复研究—— 以某型汽车 配件 为例
2 Ge o ma g i c s t u i d o点云 阶段
2 . 1 数 据 获取
同, 通过缺 口部位的形状 的直观描述 , 都表述 为残缺 部 位 。残 缺部 位 的 缺失 容易 造 成特 征 丢失 , 测 量 数据
失 真 等 多 种 问题 ,直 接 影 响下 一 步 的 三 维点 云 模 型
杨 洪 斌
( 闽西职业技术学院 , 福建 龙岩 3 6 4 0 0 0 )
摘 要: 逆向工程技术 中, 点云的数据处理是关键环 节点 。 提 出了基 于 G e o ma g i c s mi d o点云处理软件平 台, 对一个扫描有 残缺的零件点云数据 , 针对不 同的残缺 面片所体现 出来的特征 , 通过抽取表 达原始设计意 图、 体现设计特征的几何要 素 , 配合相应的结构特征 , 探 索如何更好的 完整 正确地补 齐残缺的面片点云数据 的修 复方式。
所以在点云处理阶段 ( s t u i d o 阶段 ) 以某 型机械零件为例 ,使用北京三维天下科技 实体的重构工作 , 准 确 地进 行 封 闭化 处理 , 即通 过相 关 修 补 有 限公 司 提 供 的 Wi n 3 D D单 目三 维 扫 描 仪 ,配套 相 需 要 及 时 、 应 的三维扫描系统软件 ,该系列产 品广泛应用 于中 原 则 和命 令进 行 相应 的点云 数据 修 补 。 国高职院校相关专业教学与研究 ,具有广泛的代 表
matlab点云数值曲面函数拟合

matlab点云数值曲面函数拟合Matlab是一种强大的数值计算和数据可视化工具,广泛应用于科学和工程领域。
在其中,点云数值曲面函数拟合是一项常见任务,旨在将离散的点云数据拟合成一个平滑的曲面函数。
本文将一步一步地介绍如何使用Matlab进行点云数值曲面函数拟合。
第一步:导入数据首先,我们需要准备点云数据。
点云可以通过各种方式获取,例如激光扫描、相机采集或传感器测量等。
在Matlab中,我们可以使用点云处理工具箱(Point Cloud Toolbox)对点云数据进行导入和处理。
以一个简单的例子为例,假设我们有一组离散的二维点云数据,存储在一个包含x和y坐标的矩阵中。
我们可以使用Matlab的csvread函数从一个CSV文件中读取数据,并将其存储在一个矩阵中。
matlabdata = csvread('point_cloud_data.csv');第二步:可视化数据在进行曲面函数拟合之前,我们需要先了解点云数据的特点。
为了更好地理解数据,我们可以使用Matlab的plot函数将点云数据可视化。
matlabplot(data(:,1), data(:,2), 'r.'); 将x坐标和y坐标作为坐标轴,并使用红色点表示数据xlabel('x'); 设置x坐标轴标签ylabel('y'); 设置y坐标轴标签title('Point Cloud Data'); 设置图表标题通过可视化点云数据,我们可以更好地理解其分布和形状。
这有助于我们选择合适的曲面拟合方法和参数。
第三步:曲面拟合Matlab提供了多种方法来拟合点云数据的曲面函数。
其中,最常用的方法是多项式拟合和样条曲线拟合。
1. 多项式拟合多项式拟合是一种简单而有效的方法,可以将点云数据拟合成一个多项式函数。
多项式函数的阶数决定了拟合的复杂度。
在Matlab中,我们可以使用polyfit函数进行多项式拟合。
多测源数据融合下的点云配准方法研究
多测源数据融合下的点云配准方法研究廖海平;刘彤;伍涛;杨军【摘要】工程样件的数字化测量是逆向工程的首要阶段,不同测量方法对数字化的精度、效率影响较大,将多个测源获得的不同点云数据进行融合可充分发挥不同测量方法的优点,扩大逆向工程的适用范围.采用三坐标和三维扫描仪分别对设置有特征球的鼠标模型进行三维数据采集,利用球面拟合算法对特征球的数据进行拟合,得到特征球的球心用于点云配准,基于3基点点云配准原理获得坐标变换矩阵,并给出点云配准精度评估模型,利用实验对方法的可行性进行验证.【期刊名称】《机械设计与制造》【年(卷),期】2016(000)010【总页数】4页(P200-202,206)【关键词】点云配准;坐标变换;逆向工程;数据融合【作者】廖海平;刘彤;伍涛;杨军【作者单位】中国工程物理研究院培训中心,四川绵阳621900;中国工程物理研究院培训中心,四川绵阳621900;中国工程物理研究院培训中心,四川绵阳621900;中国工程物理研究院培训中心,四川绵阳621900【正文语种】中文【中图分类】TH12;TP391.9现代制造工业的快速发展,对产品的性能和外形等方面的要求越来越高,以叶片、模具等为代表的复杂自由曲面零件越来越广泛地在生产中获得应用。
在这些自由曲面加规则型面零件的设计开发、仿制改型、快速原型以及数字化检测中,逆向工程技术是不可或缺的关键技术。
逆向工程首要步骤是对实物模型进行数据采集,主要包括以三坐标测量机为代表的接触式测量和以激光扫描仪为代表的非接触式测量两大类方法,这两类方法各有优缺点,将这两类测量方法相互结合形成新的逆向测量系统是现代逆向工程研究的重点。
两类不同测量方法得到的点云数据首先需配准到同一坐标系中,由于两类测量方法获得的数据精度、数据量以及数据格式等差别较大,故点云的配准是将两类测量方法相互结合的关键点。
国内外学者对点云配准的研究主要是基于相同测量方法获得的点云数据,如广泛采用的最近点迭代法(ICP 法)[1],也就不能满足两类测量点云的配准要求。
基于PolyWorks软件的三维点云数据建模的研究
基于PolyWorks软件的三维点云数据建模的研究简单介绍了Cyrax 2500 3D激光扫描仪的工作原理与获取点云数据的工作流程及Cyc1one6.0软件的点云数据处理。
详细介绍了PolyWorks V11软件建立三维模型的具体流程及注意事项。
文章以辽宁工程技术大学图书馆为例,详细论述了获取点云数据和处理点云数据技术。
以小汽车为例,建立了小汽车的NURBS 曲面模型。
标签:3D激光扫描仪;PolyWorks;三维模型;点云数据前言3D激光扫描技术已被广泛的应用于许多领域。
硬件方面不断完善,数据采集的精度和速度都有了很大提高,出现了不少成熟的商用3D激光扫描硬件系统。
在3D激光扫描数据处理方面,也出現了许多软件,如Cyc1one6.0、Geomagic、Imageware、SurfaceStudio、Rapid form、PolyWorks软件等。
3D激光扫描数据处理的结果就是建立3D模型。
3D模型分两种:三角化模型和NURBS曲面模型。
文章研究了1个案例,案例一是辽宁工程技术大学的图书馆模型,案例二是小汽车模型。
通过Cyrax 2500 3D激光扫描仪获取研究目标的点云数据,用PolyWorks V11软件对点云数据进行处理,包括多站点云数据对齐、合并、生成三角化模型、三角化模型漏洞修补和优化等,最后生成NURBS曲面模型。
1 数据采集1.1 Cyrax 2500 3D激光扫描仪的工作原理Cyrax 2500 3D激光扫描仪内部有一个激光器,两个旋转轴异面且互相垂直的反光镜。
反光镜由步进电机带动旋转,而激光器发射的窄束激光脉冲在反光镜作用下,沿纵向和横向依次扫过被测区域。
激光脉冲被物体漫反射后,一部分能量被3D激光扫描仪接收,如图1。
测量每个激光脉冲从发出到返回仪器所经过的时间,可以计算出仪器和物体间的距离S。
同时测量每个激光脉冲与仪器固有坐标系X轴的夹角α,XOY面的夹角θ,可以算出被测物体表面点的3D坐标。
基于Pro/Engineer的快速逆向设计应用

6 w ol c t 0 w Wm u —a e d n
维普资讯
技 术 的逆 向设计 的一 般过 程 :
模型重建后 , 应该对模 型进行必要 的分析 , 包括 结构分析 、 工艺分析和其他有 限元模拟 。最后根据模 型制定加工工艺和生成 N C加工代码 ,输入数控设备
进 行产 品或 模具 加工 。 3 基于 P o E gn e 的快速 逆 向 曲面 建模 r/ n ie r
维普资讯
毫
基 于 P oE gn e 的快 速 逆 向设 计应 用 r/ n ie r
■
摘 游 茶彪 , 刘 建雄 , 曾 志 敏
昆明理工大学 机 电工程学院 , 云南昆明, 6 0 9 503
要 : 绍 了逆 向工 程 的 定 义及 逆 向设 计 的基 本 实现 过 程 , 介 通过 对 鼠标 图 片数 据 的 曲面 快 速
提供 了一 条新 的途径 , 在机械 、 航空 、 汽车 、 家电和玩 具等领域得到了广泛的应用 。本文通过 已有的图片资 料完成 了鼠标 的表面模型反求 , 而不是利用通常所说
的通 过 点数 据 反求 模 型 , 对通 过 影像 技 术 逆 向设 计 是 的 一个初 步探 讨 。 2 基 于实物 逆 向的 实现过 程 逆 向工 程 , 称 为 反 求 工 程 , 是 以设 计 方 法 学 也 它
良好 的实物数据信息是顺利进行逆 向设计 的前
提 。对于测量或者扫描获得的点云数据 , 都会产生大 量或大或小的错误 。因此 , 对错误数据进行处理必不 可少 , 这些工作包括数据平滑 、 降低噪音数据 、 排除异 常数据 、 压缩和归并冗余数据等 ; 对于图片数据 , 处理
曲面重构中带孔洞点云数据的边界提取算法
法 。该 算法 首先计 算 出各数 据 点的 k邻域 点 , 通过 对 k邻 域 点分布 均 匀性 的判 断识 别 出内外边 界特
征点, 最后 通 过预估 边界 边 的走 向将 识 别 出的 边界 特 征 点连 接 成 边界 线 , 而识 别 出 内外 边界 线 。 从
实验表 明 , 该算 法能很好 地提 取 出孔洞 内边界 以及 开 区域 外边 界 , 带孔 洞 点 云数 据 的 曲 面重 构 奠 为
图 1所示 。
( )数据 点拓 扑关 系计 算 。数据 点拓 扑 关 系是 指 点 的 k邻 域 关 系 , 文 算 1 本
维普资讯
第2 8卷第 2期
20 0 8年 4月
苏
州
大
学
学
报f 工
科
版)
V0 . 8 N0 2 12 .
Ap . 0 r 2 08
J U N F S Z U U I R I Y( N I E R N C E C D T O O R AL O U HO N VE ST E G N E I G S I N E E II N)
意一条 边都 属于 且仅属 于两 个三 角 片 , 如果存 在某 条边 仅 属 于一 个 三 角片 , 则该 条边 是 构成 孑 洞 多边 形 的一 L 条边 , 即为边 界边 。根据 边 界边在 网格 模型 中的定 义 , 需遍 历 整个 三 角 网格 面 就 可 以找 出孑 洞 边 界 。该 方 只 L
量 : 面重 构 中带 孔 洞 点 云数 据 的边 界 提 取 算 法 曲
1 算 法 概 述
本文将 曲面模 型上 的孔 洞 内轮廓 边界 以及 开 区域 上外 轮 廓边 界 , 别 称 为 内边 界 和外 边 界 , 本 文后 面 分 在 内容 中如 不特别 注 明统 一称 为边 界 。对 于 这样 的零 件模 型测 量 出的点 云 数据 , 其边 界检 测算 法 的基本 流程 如
点云处理关键技术
5.1.3 噪声识别与去除
• 1.扫描线点云 • 扫描线点云通常是根据被测量对象的几何
形状,锁定一个坐标轴进行数据扫描得到 的,它是一个平面数据点集。Leabharlann 5.2.1 ICP匹配技术
• 1.ICP匹配问题描述 • 2.对压点的搜索方法 • 3.刚性变换求解
5.2.2基于统计特征的模型匹配初值获取技术
• 1.点云模型统计特征分类 • 三维欧氏空间中刚体的位姿由个参数确定,
包括个定位参数和个定向参数,由此将点 云模型的统计特征分为两类:定位特征(点 特征)和定向特征(矢量特征)。
5.2.3基于扩展高斯球的模型匹配初值获取技术
• 1.扩展高斯球的建立 • 由于点云数掘属于三维空间域,所以基于同样原
理建立的点云数据高斯图就变成了高斯球,为了 使高斯球的信息能够满足配准的要求,将高斯球 的端点附加点云数据的曲率信息,这样高斯球上 每个端点既包含点云数据的法矢信息,也包含其 曲率信息,所以称为扩展高斯球。。 • 建立点云数据的扩展高斯球需要法矢信息和曲率 信息,对点云数据的法矢量和点云数据曲率进行 估计,其计算过程如下所述。
5.2.2基于统计特征的模型匹配初值获取技术
• 2.点云模型统计特征提取 • 点云模型统计特征的提取依赖于点云模型
中所对应的形状特征。形状特征可简单地 分为3类:二次曲面,包括平面、球面、柱 面和锥面;规则扫掠面,包括拉伸面和旋 转面;自由曲面。二次曲面和规则扫掠面 又统称为规则形状特征。
5.2.2基于统计特征的模型匹配初值获取技术
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
; v r n ie r gcmbndap oc. nR vreE gn eigapyn eS R AC R s t a i D ; es egn ei e n o ie ra h I e es n e r , ligt U F E o w r wt 3 p i n p h f e h
速原型。 实现了逆 向工程和快速原型技术的集成_1逆 向工程流 1。 l 2
程 , 图 l 示。 如 所
图 1逆 向工 程 流程
2研究 内容
21 云数 据 的采 集 _点
22点 云数 据 的处 理 .
使用逆向工程 软件 S r cr删除杂点 。删除杂点后的点 uf e, a
张 昌 明
( 陕西理 工学院 机械 工程 学院 , 中 7 30 ) 汉 20 3
Mo s o n scou a a p o e sn n a i r t t p n n f c u ig r s a c u e p it l d d t r c s ig a d r pd p o o y i g ma u a t r e e r h n
? K ywo d : o t c u ; u eRee s n iern ; pdp ooy ig P 0E sf r e r sP i s l d Mo s ; v ree gn eig Ra i r ttpn ; r/ ot e n o wa
;
:
中图分类 号 : H1 ,P 7 文 献标识 码 : T 2T 2 4 A
激光扫描机。 鼠标表面均匀喷涂反差剂 , 在 待其干燥后进行扫描 。
扫描 中对 鼠标分别进行 了旋转了 6次进行 扫描得到完整的
点云数据 , 图 2 如 所示 。 由图 2 以看出, 可 测量所得 的点数据有杂 点。故需进行数据处理以去除杂点 。
n e n , E 是先有实体或样件 , er gR ) i 从其造型人手 , 进行 系统 的分析
;lesanr esr e ospi od a ,hc ehe-ies nl oen ta rE 一; a rcne m a e t u o tl t w i U r dm ni am dlg owrPo n s u dh m e nc u d a h St e o is f e / :g e sr eeo t co, d et c s y nts os m dl po dsh s im dl i eo a ua c sutna t e ee a te m u oe n rn f r n r i n g n s re i e c h i r i eod oe v e t l
: 观模型 , 可减 小新 产品开发过程 中遇到的风险。 :
关键词: 点云数据 ; ; 鼠标 逆向工程; 快速原型; r/ P0 E软件
÷
:
:
ห้องสมุดไป่ตู้
【 btat /ue t os tt uyo et i u e e aipo t i cnl y n 一: A s c】t s em ueoh s d b c,s s dt pd ropn t ho g dr r sh et j d c s h r ty ge o a e
;
【 要】 摘 以鼠标为研究对象, 践 了 实 逆向工程技术与快速原型技术相结合的工艺方法。 在逆向工程 ;
÷ 中应用 S R A E U F C R软件 处理 三维激光扫描仪 测量得到 的鼠标点云数据 ,进 而使 用三维造型软件 P0 ÷ r/ E
对其 进行了 重构, 曲面 获得了 所需的鼠 标实 体模型, 为新产品开发预评估、 新产品 有限 元分析等 提供了 ; 宏
1 I_ l l画 _
量, 使用 的设 备是 深 圳 巾思 瑞 精 密 机 械 有 限公 司的 S R I 维 E EN三
传统的产品实现测量通常是从概念设} N图样 , t - 再制造 出产
品 , 之 为 正 向工 程 ( 顺 向 工 程 ) 而逆 向 工 程 ( ees n i 称 或 , R vre g E —
机 械 设 计 与 制 造
2l 8 M a h n r De i n c iey sg & M a u a t r n fcue
第1 期
21 0 0年 1月
文章编号 :0 13 9 ( 0 0 O 一 2 8 0 10 — 9 7 2 1 )l 0 1— 2
鼠标 曲面点云数据处理及快速原型制作研 究 术
和研究 , 使用点云测量 系统 , 出实体 或样件 的 3 得 D数据资料 , 再 以逆向软件进行点云数据处理 , 提取特征 , 曲面建构 , 从点线 面与 实体进行误差对 比, 复调试 , 反 最终得 出较为贴进 实物原型 的几
何模型, 进而产生 C AD资料 , 最后使用快速原 ̄( ai rty — R pd o tp P o igR ) n , P 加工没备 , 3 将 D数据文件转化为 S L格式 , T 制造 出其快
;f rh e rd c r- a ai ,E hc a d c e rd c dv l m n p oeso er k. o e wpo u t e vl t g F A w ihc nr u enwp o u t eeo e t rcs t i s t n p u n e p fh s
ZHANG a —mi g Ch ng— n
( c o l f c a ia n ie r g S a n i ie s yo e h oo y Ha z o g7 3 0 , h n ) S h o h nc l gn ei , h a x v ri f c n lg , n h n 2 0 3 C ia o Me E n Un t T