交通系统仿真实验报告
交通仿真实验报告
交通仿真实验报告1. 引言交通仿真是通过模拟真实道路交通环境来研究交通流动规律的一种方法。
本文旨在通过交通仿真实验来探讨交通拥堵的产生原因,并提出相应的改善措施。
2. 实验目的本次实验的目的是通过仿真模拟交通流动情况,分析交通拥堵的产生原因,并研究改善措施,从而为实际交通管理和规划提供参考。
3. 实验环境和工具本次实验使用了MATLAB软件来进行交通仿真。
MATLAB是一种常用的科学计算软件,它具有强大的数据处理和可视化分析能力,非常适合用于交通仿真实验。
4. 实验步骤4.1 数据收集首先,我们需要收集实际交通流动的数据,包括车辆数量、车速、车道宽度等信息。
这些数据可以通过交通摄像头、交通流量统计仪等设备来获取。
4.2 地图建模根据收集到的数据,我们可以使用MATLAB来建立交通仿真的地图模型。
地图模型应该包括道路、车辆和交通设施等元素,以尽可能真实地模拟实际交通情况。
4.3 交通流动仿真在地图模型建立完成后,我们可以进行交通仿真实验了。
通过设置不同的道路条件和车辆行为参数,观察交通流动情况,并记录相关数据。
4.4 数据分析在完成交通仿真后,我们可以对实验数据进行分析。
通过分析车辆密度、车速、道路容量等指标,可以找出交通拥堵产生的原因,如道路狭窄、车辆行为不当等。
4.5 改善措施根据实验数据分析的结果,我们可以提出相应的改善措施。
例如,如果发现道路狭窄导致交通拥堵,可以建议改扩建道路;如果发现车辆行为不当导致交通拥堵,可以建议加强交通法律法规的宣传和执行。
5. 结果与讨论根据实验数据分析的结果,我们可以得出交通拥堵产生的原因和相应的改善措施。
同时,我们还可以讨论交通仿真的局限性和不足之处,并提出进一步改进的建议。
6. 结论通过本次交通仿真实验,我们深入了解了交通拥堵的产生原因,并提出了改善措施。
交通仿真在交通管理和规划中具有重要的应用价值,可以帮助我们更好地理解和改善交通流动情况。
7. 参考文献[1] Smith, M. J. (1995). Traffic flow fundamentals. Transportation Research Part B: Methodological, 29(2), 145-160.[2] Treiber, M., Hennecke, A., & Helbing, D. (2000). Congested traffic states in empirical observations and microscopic simulations. Physical Review E, 62(2), 1805-1824.[3] 王晓晖. (2010). 基于交通仿真的交通流动研究[D]. 吉林大学.以上是本次交通仿真实验报告的详细内容。
智能交通管理系统仿真实验报告
智能交通管理系统仿真实验报告一、引言随着城市化进程的加速和汽车保有量的不断增长,交通拥堵、交通事故等问题日益严重,给人们的出行带来了极大的不便。
为了有效地解决这些问题,提高交通系统的运行效率和安全性,智能交通管理系统应运而生。
智能交通管理系统是将先进的信息技术、通信技术、控制技术等应用于交通领域,实现对交通流量、路况等信息的实时监测和分析,并通过优化交通信号控制、引导交通流量等手段,提高交通系统的整体性能。
本次实验旨在通过对智能交通管理系统的仿真研究,深入了解其工作原理和性能特点,为实际交通管理提供理论依据和技术支持。
二、实验目的1、熟悉智能交通管理系统的组成结构和工作原理。
2、掌握智能交通仿真软件的使用方法。
3、研究不同交通流量和路况下智能交通管理系统的性能表现。
4、分析智能交通管理系统对交通拥堵和交通事故的缓解效果。
三、实验设备与环境1、计算机:配置较高的台式计算机或笔记本电脑。
2、智能交通仿真软件:选用了具体软件名称仿真软件,该软件具有强大的交通建模和仿真功能,能够模拟各种交通场景和交通管理策略。
3、操作系统:Windows 10 操作系统。
四、实验原理智能交通管理系统主要由交通信息采集子系统、交通信息处理与分析子系统、交通信号控制子系统、交通诱导子系统等组成。
交通信息采集子系统通过各种传感器和监测设备,实时采集交通流量、车速、路况等信息;交通信息处理与分析子系统对采集到的信息进行处理和分析,提取有用的交通参数和特征;交通信号控制子系统根据交通流量和路况信息,优化交通信号控制方案,提高道路通行能力;交通诱导子系统通过可变信息标志、导航系统等,为出行者提供实时的交通信息和出行建议,引导交通流量合理分布。
智能交通仿真软件通过建立交通模型,模拟交通系统的运行过程,从而对智能交通管理系统的性能进行评估和优化。
在仿真过程中,可以设置不同的交通流量、路况、交通信号控制策略等参数,观察交通系统的运行状况和性能指标的变化。
交通科学小实验报告

交通科学小实验报告1. 实验目的本实验通过模拟和观察不同交通条件下的交通流量和拥堵情况,探究交通规划与交通拥堵之间的关系,增进对交通科学的了解。
2. 实验材料与方法2.1 实验材料- 交通模型:使用电脑上的交通模拟软件,模拟不同交通条件下的交通流量和拥堵情况。
2.2 实验方法1. 设定不同的交通条件:包括交通密度、交通信号的时间间隔等参数;2. 在交通模型中设置车辆出发地和目的地,观察车辆在不同条件下的行驶情况;3. 记录车辆行驶过程中的平均速度和车辆拥堵情况;4. 对实验结果进行分析和总结。
3. 实验过程在实验中,我们设定了以下不同的交通条件进行模拟和观察:- 实验A:交通密度较低,交通信号的时间间隔较大;- 实验B:交通密度较高,交通信号的时间间隔较小;通过观察交通模型中的车辆行驶情况,我们记录了每个实验条件下的平均速度和车辆拥堵情况。
4. 实验结果实验A的平均速度约为30km/h,车辆行驶较为顺畅,几乎没有拥堵情况。
而实验B的平均速度仅为10km/h,路段出现了明显的拥堵现象,车辆行驶受到严重影响。
通过对实验结果的分析,我们可以得出以下结论:1. 交通密度和平均车速呈反比关系:交通密度增加时,平均车速会降低,车辆行驶会受到拥堵的影响;2. 交通信号的时间间隔对交通流量有一定影响:时间间隔较短时,车辆流动性较差,易出现拥堵。
5. 实验结论本实验结果表明,交通规划对于减少拥堵、提高交通效率非常重要。
合理的交通密度和交通信号设置可以大大改善交通状况,减少交通拥堵。
进一步研究发现,除了交通密度和信号设置外,还有其他因素也会影响交通流量和拥堵情况,包括道路设计、驾驶行为等。
因此,在实际交通规划中,还需要综合考虑多个因素,制定出合理的交通管理措施。
6. 实验心得通过本次实验,我深刻认识到交通规划对于现代城市发展的重要性。
交通科学作为一门交叉学科,不仅需要了解基本交通原理,还需要结合城市规划、交通工程等相关学科的知识,才能更好地解决实际问题。
仿真实验报告模板

AGV任务分配与充电配置选择模型1、作业流程描述在集装箱码头的AGV作业流程:首先系统根据当前作业情况进行判断,若此时无运输任务,AGV进入休息区等待;若存在运输任务,则判断当前处于工作状态的AGV数量是否足够;若不足,则将非工作AGV组中的AGV分配至工作组。
当AGV完成一次运输作业后会对自身电量进行判断,若此时电量高于30%,则继续进行运输作业;若此时电量低于30%,则前往充电桩充电。
确立仿真参数的输入,确立任务数,AGV数量,自动充电桩数量,充电桩充电速度,AGV最低充电阈值(30%),AGV电量充足阈值(80%)。
2、仿真目标设置本文的仿真目标是设计和实施一个集装箱自动化码头作业流程的仿真模型,并评估其中的AGV充电任务调度策略。
具体而言,仿真目标包括以下几个方面:首先,模拟进口箱作业流程:建立一个真实的模拟环境,包括岸桥提取进出口箱、AGV小车水平运输等环节,以准确模拟进口箱的作业流程。
其次,实现AGV充电任务调度:开发一个高效的AGV充电任务调度算法,考虑到AGV的电池寿命和电量状态,以最小化充电任务的时间和成本。
该算法将基于实时的作业需求和AGV的可用状态进行智能调度,以保证作业流程的平稳运行。
再次,评估作业效率和成本:通过仿真模型,分析和比较不同的AGV充电任务调度策略对作业效率和成本的影响。
使用实际数据和性能指标,如作业时间、能源消耗和人力成本等,对各种策略进行定量评估,并找到最佳的调度策略。
最后,提出优化建议,在自动化集装箱码头作业流程中,合理的充电桩布局可以显著提升AGV充电任务的效率和整体作业流程的顺畅性。
分析作业热点区域:通过对集装箱作业流程中的瓶颈区域和高频度作业区域进行分析,确定作业热点区域。
这些区域通常是集装箱堆场附近、码头入口/出口以及岸桥与AGV交接点等位置。
准确定位热点区域可以帮助本文合理布置充电桩,以满足高负荷作业需求。
考虑AGV行驶距离和电池寿命:根据AGV的行驶距离和电池寿命特性,合理分析AGV的电池续航能力。
工作报告-交通仿真实验报告
工作报告-交通仿真实验报告标题:交通仿真实验报告一、实验目的本实验的目的是通过交通仿真技术对不同交通流量下的交通运行情况进行模拟分析,了解交通系统的瓶颈和拥堵点,为交通规划和交通管理提供科学依据。
二、实验原理交通仿真是一种基于计算机模拟的方法,通过模拟交通环境、车辆和交通参与者的行为,以及道路基础设施的运行情况,来预测交通运行状态。
本实验利用交通仿真软件,建立虚拟交通网络,模拟不同交通流量条件下的车辆运行情况和交通拥堵状况。
三、实验步骤1. 设定交通网络:根据实际道路网络,利用交通仿真软件搭建道路网络,并设置路段、路口等交通元素。
2. 设置交通流量:根据交通状况和实验需求,设定不同交通流量条件下的车辆出行规模和行为模式。
3. 运行仿真模拟:通过设置好的交通流量条件,运行交通仿真模拟,观察车辆的行驶状态、交通拥堵状况等。
4. 数据分析和结果统计:根据仿真结果,分析交通瓶颈、路段拥堵情况,统计车辆平均速度、通行时间等指标。
四、实验结果根据不同交通流量条件下的仿真结果,得到以下结论:1. 随着交通流量的增加,道路网络的通行能力减小,交通拥堵现象显著增加。
2. 部分路段和路口成为交通瓶颈,导致交通拥堵点集中出现。
3. 车辆平均速度和通行时间与交通流量呈反比关系。
五、实验总结通过交通仿真实验,我们可以实现对交通系统的模拟和分析,了解交通运行状态和瓶颈所在,为交通规划和交通管理提供科学依据。
然而,交通仿真实验还需要综合考虑多个因素,如道路设计、信号控制等,以提高模拟结果的准确性和可靠性。
六、存在问题和改进措施在本实验中,由于部分交通仿真软件的局限性和数据不准确性,导致仿真结果的准确性尚有待提高。
为此,我们应该在选择仿真软件时进行全面评估,并准确获取实际交通数据,以提高实验结果的可靠性。
七、进一步研究展望基于交通仿真技术的研究还可以拓展到更广泛的领域,如城市交通规划、智能交通系统等。
未来的研究可以结合实际交通数据和智能算法,进一步提高交通仿真的准确性和实用性。
系统仿真实验报告范文

系统仿真实验报告范文四川大学课程实验报告课程名称:系统仿真综合实验学生姓名:学生学号:专业:实验目的系统仿真是运用仿真软件(如imio)创造模型来构建或模拟现实世界的虚拟实验室,它能过帮助你探寻你所关注的系统在给定的条件下的行为或状态,它还能帮助你在几乎没有风险的情况下观察各种改进和备选方案的效果。
尤其是对一些难以建立物理模型和数学模型的复杂的随机问题,可通过仿真模型来顺利地解决预测、分析和评价等系统问题。
实验地点及环境四川大学工商管理学院的学院大楼综合实验室,运用PC机及imio系统仿真软件,在老师的指导下完成此次系统仿真实验。
实验步骤㈠、建立模型1.ModelⅠ首先加入一个ource、三个erver、一个ink、一个ModeEntity,并用path连接。
将ource更名为arrive,ink更名为depart,ModelEntity更名为cutomer。
设置运行时间8小时。
在Animation中添加StatuLabel到arrive,E某preion为arrive.OutputBuffer.Content。
同样为erver和dapart添加StatuLabel,E某preion分别为Server1.InputBuffer.Content、Server2.InputBuffer.Content、Server3.InputBuffer.Content、depart.InputBuffer.NumberEntered,来记录每个位置的排队人数和通过人数。
为每个erver添加一个Te某tScale为1的Statupie,来显示和观察服务台的利用率变化。
保存命名为ModelⅠ。
2.ModelII首先加入一个ource、三个erver、一个ink、一个ModelEntity,并用path连接。
将ource更名为arrive,ink更名为depart,ModelEntity更名为cutomer。
在Animation中添加StatuLabel到arrive,E某preion为arrive.OutputBuffer.Content。
交通系统仿真实验报告
道路交通系统仿真实验实验一 VISSIM班级:08交通工程学号:120081501131 姓名:王两全一、实验目的1.掌握用VISSIM绘制简单的路网;2.掌握如何给路网添加基本的路网元素(如:信号灯、路径决策、冲突区域、优先规则、公交站点等);3.掌握对仿真模型进行指标评价,包括行程时间、延误、排队长度以及相关参数的设置。
二、实验设备1.硬件要求:装有VISSIM的PC机一台;2.系统要求:能在Windows 2000、XP和VISTA环境下运行;三、实验要求在VISSIM中构建一个平面信号控制交叉口模型,不考虑行人和非机动车,具体要求见试卷。
四、实验内容与步骤1.绘制路网(1)根据实验要求导入背景图;(2)按照每车道宽3.5m设置比例尺参数,根据背景图绘制一个T形交叉口(北进口封闭),交叉口宽度:南北:45m、东西99m;(3)初步路网结果图.2.添加路网元素(1)对绘制好的路网标明车道方向;(2)输入车辆数:400辆/车道小时;(3)信号配时;(4)设置行驶路径决策;(5)设置一条跨越交叉口的公交线路并设置两种不同的公交站点:港湾式和路边式;(6)设置冲突区域。
(7)添加路网元素后的结果3.设置仿真评价指标(1)行程时间;创建时间检测,并在“评价->文件”进行行程时间检测设置。
(2)延误;(3)排队长度。
1.信号控制2.冲突区域通过该实验巩固了初步使用VISSIM对一个完整路网的构建,对Vissim 的各个功能有更深刻的了解。
但由于实验过程中可能有一些小细节出错了,导致两种控制方式的评价指标结果都一样,通过多次的调试仍然未找出错误的地方,这是该实验遗憾的地方。
理论上讲,该试验的交叉口可以看成是主干道与次干道的相交(东西为主干道,南北为次干道且),而且该交叉口的流量比较小,粗略判断应该是冲突区域控制会比信号控制更加优越。
同时,此次实验为我们以后自己动手进行交通仿真做了很好的铺垫。
交通运输系统仿真实验报告
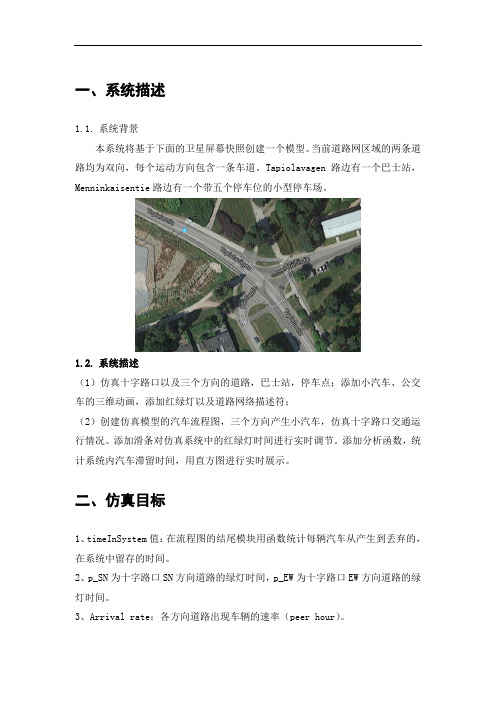
一、系统描述1.1.系统背景本系统将基于下面的卫星屏幕快照创建一个模型。
当前道路网区域的两条道路均为双向,每个运动方向包含一条车道。
Tapiolavagen路边有一个巴士站,Menninkaisentie路边有一个带五个停车位的小型停车场。
1.2.系统描述(1)仿真十字路口以及三个方向的道路,巴士站,停车点;添加小汽车、公交车的三维动画,添加红绿灯以及道路网络描述符;(2)创建仿真模型的汽车流程图,三个方向产生小汽车,仿真十字路口交通运行情况。
添加滑条对仿真系统中的红绿灯时间进行实时调节。
添加分析函数,统计系统内汽车滞留时间,用直方图进行实时展示。
二、仿真目标1、timeInSystem值:在流程图的结尾模块用函数统计每辆汽车从产生到丢弃的,在系统中留存的时间。
2、p_SN为十字路口SN方向道路的绿灯时间,p_EW为十字路口EW方向道路的绿灯时间。
3、Arrival rate:各方向道路出现车辆的速率(peer hour)。
三、系统仿真概念分析此交通仿真系统为低抽象层级的物理层模型,采用离散事件建模方法进行建模,利用过程流图构建离散事件模型。
此十字路口交通仿真系统中,实体为小汽车和公交车,可以源源不断地产生;资源为道路网络、红绿灯时间、停车点停车位和巴士站,需要实施分配。
系统中小汽车(car)与公共汽车(bus)均为智能体,可设置其产生频率参数,行驶速度,停车点停留时间等。
四、建立系统流程4.1.绘制道路使用Road Traffic Library中的Road模块在卫星云图上勾画出所有的道路,绘制交叉口,并在交叉口处确保道路连通。
4.2.建立智能体对象使用Road Traffic Library中的Car type模快建立小汽车(car)以及公共汽车(bus)的智能体对象。
4.3.建立逻辑使用Road Traffic Library中的Car source、Car Move To、Car Dispose、roadNetworkDescriptor、trafficLight以及Process Modeling Library中的SelectOutput模块建立系统逻辑流程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验报告
2012 年 11 月 10 日
课程名称 道路交通系统仿真 学生姓名 学 号 专业班级 指导教师 院系名称 交通运输工程学院
实验一随机数生成程序
一.实验要求
产生1~1000的随机数,个数大约256个。
二.实验环境
工具使用Visual C++ 6.0,程序类型Win32 Console Application。
三.实验原理
根据公式x[i]=a*x[i-1]mod(m),可根据所需范围值确定a和m的值,本实验中需要1~1000的随机数,因此可以选择a=35,m=1024。
其周期为(m/4)=256,产生256个1~1024之间随机数。
根据需要,我们舍弃大于1000的随机数,原理是我们使用中间变量连接产生的数与我们需要的数组,通过对中间变量的不断循环,当产生大于1000的随机数时,我们继续使中间变量不断循环但不放入数组,从而舍弃这些数字,最终得到我们需要的1~1000的随机数的数组并输出数组中的数,并计数其个数,这样就完成了我们的产生随机数的目的。
四.实验步骤
图一随机数程序流程图。