水下生产控制系统结构的设计与研究
船体运动在水下设备管道应力分析中的影响与研究
-5-
论文广场
船体运动在水下设备管道应力分析中的影响 与研究
孟宪武,张飞
(海洋石油工程股份有限公司, 天津 300451)
[摘 要] 对水下设备管道在运输工况下所受荷载进行了研究与分析。依据DNV-RU-SHIP计算水下设备在船体受到波浪载荷而引 起的加速度,并分析了横向、纵向及垂向加速度对管道的影响,最后利用AutoPIPE软件对管道进行应力分析计算。本文对水 下设备管道应力分析中的运输工况进行了详细研究,并提供了理论依据,此分析与计算方法可为以后工程项目的管道设计提 供参考。 [关键词] 水下设备;船体运动;横摇;纵摇;升沉;管道应力分析
包络横向加速度ay-env,单位m/s2,计算公式:
3 水下设备建模 在船体运动计算中,选取的计算点尤为重
要,它直接影响到横向、纵向和垂向包络加速度 的取值。通常将水下设备的重心作为计算点,包 络加速度计算公式中的x、y和z,即设备重心在船 体坐标系中的横、纵和垂向的距离。
为了能够精确地测量出设备的重量和重 心位置,通常需要借助于计算机软件。目前 SOLIDWORKS软件在工程3D建模领域应用较为 广泛,该软件能对水下设备的结构基础、保护框 架、管道系统及控制单元进行真实完美的模拟。
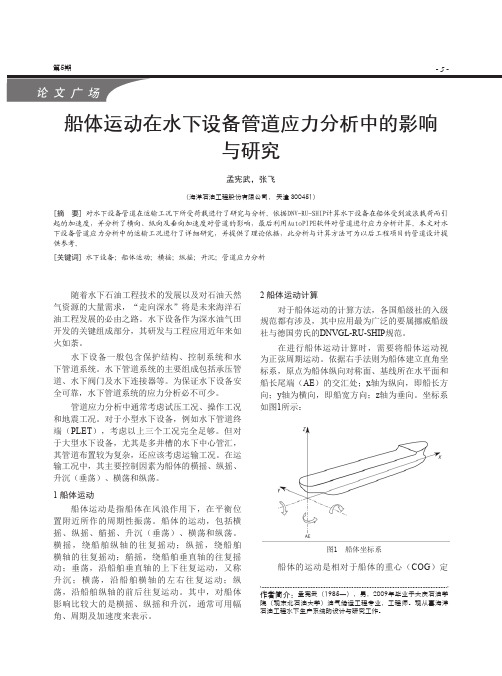
图1 船体坐标系
船体的运动是相对于船体的重心(COG)定
作者简介:孟宪武(1985—),男,2009年毕业于大庆石油学 院(现东北石油大学)油气储运工程专业,工程师。现从事海洋 石油工程水下生产系统的设计与研究工作。
-6-
论文广场
义的,纵荡(surge)沿着船长方向,即x轴正向或 负向;橫荡(sway)沿着船宽方向,即y轴正向或 负向;升沉(heave)沿着垂直方向,即z轴正向或 负向;橫摇(roll)为围绕穿过重心的纵轴转动轴 作顺时针或逆时针的旋转;纵摇(pitch)为围绕穿 过重心的横轴转动轴作顺时针或逆时针的旋转;艏
16264036_水下生产设备测试技术研究

收稿日期 修回日期 !!
+!"#-,##,"#%
!"#$,"#,!+
!!作者简介刘培林!#+.'( 男 #" "教授级高级工程师"主要从事海洋石油工程管理及设计工作$
Copyright©博看网. All Rights Reserved.
,!#!!,
海洋工程装备与技术
第'卷
@! 项 目 案 例
#k#!项目概述
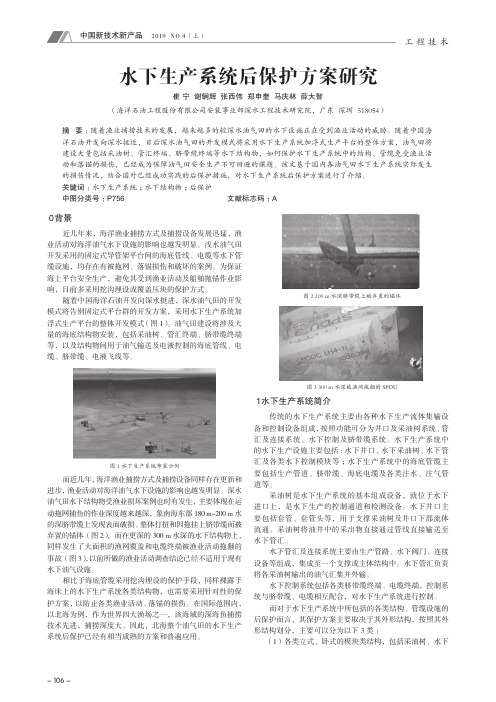
南海某油气开发项目水深为 水 #&"#'"K" 下 采油树生产流体通过跨接管汇集到水下中心生产 管汇"然后利用一条$英寸!#英寸 海 #!k'%IK# 管 回接下游油气处理平台%水下采油树 B<Z 通过电 飞缆&液飞缆与 BY(Y 相连"再利用脐带缆回接下 游支持平台"通过平台上的 @SY*Z<B和 实 )SY" 现对水下生产系统的自动控制$该项目的水下生 产流程如图#所示$
飞缆 液 !)AQ#* 飞缆 水 !@AQ#* 下控制模块!B<Z# 等$平台和水下控制设备之间的电力*通信信号传 输和液压控制通过脐带缆连接来实现 $ '#) 但水下生 产 系 统 也 存 在 投 资 大 *维 护 困 难 *可 靠 性 要 求 高 等 限制 因 素 $ 在 出 厂 *运 输 *安 装 等 过 程 中 对 水 下 生 产设备进行测试"可确保安装后水下生产系统的可 靠性满足稳定生产的要求$
试*整体测试及预调试投产等相关内容"可为后续类似项目开发提供借鉴$
水下机器人的设计与控制系统
水下机器人的设计与控制系统水下机器人是一种能够在水下环境中执行各种任务的机器人系统,其设计与控制系统对于保证机器人的运行稳定性、任务执行能力以及操作人员的安全至关重要。
在本文中,将会介绍水下机器人设计与控制系统的基本原理、关键技术和挑战,并探讨其应用和发展前景。
水下机器人的设计与控制系统主要包括机械结构设计、传感器系统、控制算法和通信系统等方面。
首先,机械结构设计是水下机器人的基础,需要考虑水下环境的压力、流体力学特性以及机器人的稳定性和灵活性。
通常,水下机器人采用球形或者鱼雷形状的外壳,可以减小水流对其产生的阻力,提高机器人的机动能力。
此外,机械臂的设计也是关键因素,可以完成各种操作任务,如采样、维修和搬运等。
其次,传感器系统是水下机器人的"感知器官",能够获取周围环境信息以及机器人自身状态。
在水下环境中,由于水的压力和水流的干扰,传感器的选型和安装位置需要特别考虑。
常见的传感器包括声纳、摄像头、水质传感器、陀螺仪和加速度计等。
声纳传感器可以用于定位、避障和目标识别,摄像头则可以实现图像采集和目标跟踪等功能。
水质传感器可以监测水体的溶解氧、温度、盐度等参数,用于环境监测和资源调查。
而陀螺仪和加速度计则可以提供机器人的姿态和运动信息,用于控制算法的运算和决策。
控制算法是水下机器人设计与控制系统的核心,直接影响机器人的运动能力和任务执行效果。
在水下环境中,由于水的多样性和复杂性,控制算法需要具备一定的自主适应性和智能化。
常见的控制算法包括PID控制器、模糊控制算法、遗传算法和神经网络等。
PID控制器可以通过调节机器人的姿态和运动来实现控制目标,模糊控制算法则可以应对环境变化和不确定性。
遗传算法和神经网络则可以实现机器人的智能决策和路径规划。
除了以上几个方面,水下机器人的设计与控制系统还需要考虑通信系统的设计。
在水下环境中,由于水的吸收和散射,无线通信的可靠性和传输速率较低。
因此,水下机器人通常采用声波通信或者通过光缆进行通信。
可实现在线检修的水下造粒系统的设计与研究

可 实现在 线检修 的水下造粒 系统 的设计 与研 究
徐 天 艺
( 合 肥会 通 中科 材料 有 限公 司 , 安徽 合肥
摘
2 3 0 0 8 8 )
De s i g n a n d Re s e a r c h o f U nd e r wa t e r Pe l l e t i z i n g S y s t e m wi t h O n l i ne M a i n t e n a nc e
XU  ̄a n - y i
要: 水 下 造粒 系统 是 一 种机 、 电、 液一 体 化 设 备 , 广 泛 应 用 于 聚 合 物 造粒 中 , 特别适用于大产能的生产线。 普通 的水 下造 粒 系统 在 故
障检修与排除时需停机才能完成 。 通 过 对 水 循 环 系统 的改 进 设 计 可 以实 现 在 线 检 修 , 大 大 提 高 了工 作 效 率 。在线 检 修 过 程 大 大 缩 短 了
故障诊断与排除时 间, 减少 了 浪 费 , 大大提高了设备的利用效率 , 节 约 了成 本 。 关键词 : 水下造粒系统 ; 在线检修 ; 水 循 环 系统 ; 造粒 ; 故 障诊 断
中图分类号 : T Q 3 2 0 . 5 + 2
文献标识码 : A
文章编号 : 1 0 0 8 一 O 8 l 3 ( 2 O 1 4 ) 0 2 — 0 0 1 7 一 O 3
பைடு நூலகம்
0 引 言
液 压 气 动 元 件 和 系 统 是 现 代 机 械 的重 要 组 成 部 分 。 它 主 要 完 成 力 和 运 动 的产 生 与 转 换 和 能 量 的 传 递、 分 配 和 效 率 等性 能 指 标 , 是 机 电 产 品 向高 速 化 、 自 动化 、 高效率 、 高精 度 、 高可靠性 、 轻量化 、 多 样 化方 向
水下生产系统后保护方案研究
而对于水下生产系统中所包括的各类结构、管缆设施的 后保护而言,其保护方案主要取决于其外形结构,按照其外 形结构划分,主要可以分为以下 3 类 :
(1)各类立式、卧式的模块类结构,包括采油树、水下
- 106 -
中国新技术新产品 2019 NO.4(上)
工程技术
水下生产系统后保护方案研究
崔 宁 谢锏辉 张西伟 郑申奎 马庆林 薛大智 (海洋石油工程股份有限公司安装事业部深水工程技术研究院,广东 深圳 518054)
摘 要 :随着渔业捕捞技术的发展,越来越多的较深水油气田的水下设施正在受到渔业活动的威胁。随着中国海
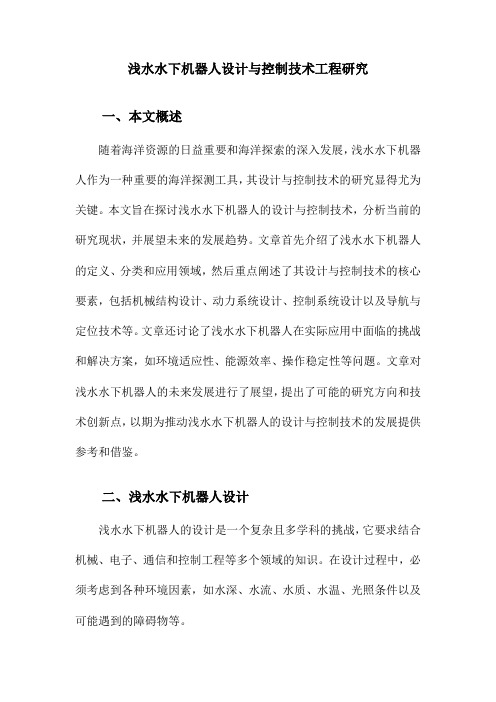
对于模块类结构物保护,多采用钢结构保护罩的保护形 式(图 4)。根据被保护物的外形特征,保护罩的外形尺寸可 能存在不同,但整体结构类似,均为梯形体。边、梁结构以 钢管、工字钢为主,顶面、斜面为钢质格栅板,以减轻整体 重量。为保证良好的防渔业活动和抗落锚损伤,钢结构保护 罩应至少具备以下 2 个基本性能 :
工程技术
2019 NO.4(上) 中国新技术新产品
管汇、脐带缆终端、电缆终端等。 (2)海底管缆,主要包括海底管道及连接各模块的脐带
缆、电缆、电液飞线等。 (3)特殊结构,主要指各类水平或垂直跨接管。 后保护方案将按照各设施不同的外形结构进行针对性
地考虑和设计。
2 模块类结构物的保护
首先油气田水下生产系统通常远离航道,非航道海域 本身来往船只少,且船舶在深水区域抛锚的概率又极小,因 此模块类的结构物,如采油树、管汇、终端等,其主要威胁 来自拖网捕捞等渔业活动。常见的损伤形式包括结构整体倾 覆、阀门等零部件破坏导致的功能失效等。
浅水水下机器人设计与控制技术工程研究
浅水水下机器人设计与控制技术工程研究一、本文概述随着海洋资源的日益重要和海洋探索的深入发展,浅水水下机器人作为一种重要的海洋探测工具,其设计与控制技术的研究显得尤为关键。
本文旨在探讨浅水水下机器人的设计与控制技术,分析当前的研究现状,并展望未来的发展趋势。
文章首先介绍了浅水水下机器人的定义、分类和应用领域,然后重点阐述了其设计与控制技术的核心要素,包括机械结构设计、动力系统设计、控制系统设计以及导航与定位技术等。
文章还讨论了浅水水下机器人在实际应用中面临的挑战和解决方案,如环境适应性、能源效率、操作稳定性等问题。
文章对浅水水下机器人的未来发展进行了展望,提出了可能的研究方向和技术创新点,以期为推动浅水水下机器人的设计与控制技术的发展提供参考和借鉴。
二、浅水水下机器人设计浅水水下机器人的设计是一个复杂且多学科的挑战,它要求结合机械、电子、通信和控制工程等多个领域的知识。
在设计过程中,必须考虑到各种环境因素,如水深、水流、水质、水温、光照条件以及可能遇到的障碍物等。
结构设计:浅水水下机器人的结构设计必须确保其在水下的稳定性和耐用性。
通常,机器人会被设计成流线型以减少水流阻力,并使用耐腐蚀的材料以防止海水侵蚀。
还需要设计合适的密封结构,以确保机器人的防水性能。
动力系统:动力系统的选择对于浅水水下机器人的性能至关重要。
通常,浅水水下机器人会采用推进器或螺旋桨作为动力来源,以驱动机器人在水下移动。
还需考虑能源供应问题,如使用电池或燃料电池等。
感知与导航系统:为了实现对环境的感知和导航,浅水水下机器人通常会配备各种传感器,如摄像头、声纳、雷达等。
这些传感器可以帮助机器人感知周围环境,识别障碍物,并实现自主导航。
通信与控制系统:通信与控制系统是浅水水下机器人的核心。
通过无线通信技术,机器人可以与地面站进行数据传输和指令接收。
控制系统则负责解析指令,并控制机器人的运动和行为。
任务模块:根据具体的应用场景,浅水水下机器人还可以设计各种任务模块,如采样器、摄像机、探测器等。
水下清洁机器人运动控制系统设计研究
本文主要结合相关的研究背景设计了一种水下清洁机器人,作为一种水下设备的清洁维护的机器人,保障水下设备的正常运行。
文章首先在引言部分对本文的研究背景及意义进行阐述,然后重点提出了水下清洁机器人运动控制系统的总体设计方案,并对其运动模型进行设计和仿真。
1 引言海洋开发逐渐向特殊领域以及高深度领域转变,难度越来越大,人力开发已经完全不能够满足开发的需求,机器人开发已经成为了新趋势。
本文主要在此背景下分析和研究水下清洁机器人的运动控制系统的设计。
本文设计的水下清洁机器人主要是用于对水下的一些大型设备,例如海底搜救设备、勘测设备、取样设备等进行水下维护和修复等,能够在水下特殊环境中对海底设备进行维护和处理,能够较大程度上的促进海底开发技术的发展。
2 水下清洁机器人运动控制系统总体设计2.1 水下清洁机器人运动控制流程本文设计的水下清洁机器人的控制系统主要由主机、控制算法、控制电路、指令转换、机器人载体、采样设备等组成,具体的控制流程为:主机控制算法进行水下机器人的动力分配,并结合指令转换算法进行整理转换,结合控制电路开启操控箱,下达操作指令,机器人载体接到命令驱动机器人进行采样,采集样本之后将样本信息传递到主机处理系统当中,进行处理。
2.2 模拟运动控制平台结构设计水下机器人的运动控制平台主要包括六个部分:步进电机、云台、安装板、推进器、U型板以及轴承等。
其中云台主要实现的是2自由度的运动,包括水平和横向两个方向。
本文模拟的控制平台主要实现的是3自由度的运动控制,除了上述2自由度之外,还包括前后摇摆自由度。
由于多了一个自由度,因此需要对运动进行定位,该运动平台的定位主要由带套轴承和法兰轴组成固定左侧,由带套轴承和电机轴固定右侧,右侧的电机由法兰固定,由此就设计出了一个6自由度的模拟运动控制平台(边宇枢,高志慧,贠超,6自由度水下机器人动力学分析与运动控制:机械工程学报,2007)。
2.3 地面操控台结构设计地面操控台主要是对上述的模拟运动控制平台进行控制,地面操控台主要包括显示器、操纵杆、按钮以及指示灯等。
超深水防喷器组及其控制系统配置探讨
超深水防喷器组及其控制系统配置探讨曹式敬【摘要】Based on the extreme challenge of environment in ultra-deep waters,the requirements on the BOP stack and its control system are very high in order to ensure secure operation. In view of the current situation,an unified standard for ultra-deep water BOP stack is still unavailable in the oil industry and the research and development of BOP stack is also in its infancy in China. An enhanced configuration was put forward through analyzing functions of the subsea BOP and its control system. Different from the present technical standard and the configuration of HYSY981 ultra-deep water drilling unit, the capacity of shear ram is improved and the backup and special control system are compulsory items in this configuration, which improves the safety and reliability of ultra-deep water drilling operation significantly.%超深水海域海洋环境极其复杂,对保证钻井安全的防喷器组及其控制系统的要求非常高.针对目前超深水防喷器组及控制系统没有统一的配置规范与标准和我国该方面产品研发及配置尚处于起始阶段的现状,提出了一种比较合理的防喷器组及控制系统配置方案.分析该方案中防喷器组中各种防喷器的功能和作用及控制系统的控制方法和特点,发现该方案与现行技术标准及HYSY981超深水钻井装置的防喷器组及其控制系统的配置方案相比,提高了对剪切防喷器的要求,并将备用控制系统和特殊控制系统作为了必配项目,超深水钻井作业的安全性和可靠性明显增强.【期刊名称】《石油钻探技术》【年(卷),期】2012(040)005【总页数】4页(P115-118)【关键词】超深水钻井;井控;防喷器;控制系统【作者】曹式敬【作者单位】中海油田服务股份有限公司钻井事业部,河北三河065201【正文语种】中文【中图分类】TE921+.5超深水海域钻井远离岸边、作业区海况非常复杂,抢险、逃生及救援极为困难。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2016年 6月
石 油 化 工 自 动 化
AUTOM AT10N IN PETR( CHEM ICAL INDUSTRY
Vo1.52,No.3 Jun,2016
水 下 生 产 控 制 系统 结 构 的设 计 与红
(中国石油集团海洋工程有限公 司,北京 100028)
(China National Petroleum Offshore Engineering Co.Ltd.,Beijing,100028,China)
Abstracts:A s an important part of subsea production system ,subsea production control system (SPCS) provides functions including data acquisition, rem ote eontrol, monitoring and treatment of abnormal situation. To meet requirements of safety, reliability, econom y and operability,configuration design of SPCS is studied, functions and com position of SPCS are described, advantages and disadvantages of various SPCS architectures of independent, balance,com bination and ring are compared,factors considered for design are analyzed. Key design points for SPCS architecture are drawn which can be used as reference in SPCS design. Key words: deep—water oilfield development; subsea production system ; subsea production control system :contro1 system configuration
要点 ,可供 SPCS设计参考 。
关 键 词 :深水油气 田开发 水下生产系统 水下生产控制 系统 控 制系统结构
中图分类号 :TP273
文献标志码 :B
文章编号 :1007—7324(2016)03-0013—05
Design and Research on Subsea Production Control System Configuration Tan Zhuangzhuang,Li Xiaorui,Zhang Fenghong
SPCS的结 构是 指 SPCS的控 制设备 在 水下 的 分 布方 式 、水 下 安装设 备 与上 部安 装设 备 的连接 方
式 以及水下设备相互之间的连接方式等 ,主要包括 独 立 式 、平 衡式 、组合 式 、环形 等结构 。由于每个 项 目的控制距 离 、水下井 口分布 、依 托设 施各 不相 同 , 需 要 根 据 项 目具 体 情 况 选 择 不 同 的 SPCS结 构 。 SPCS结 构 的选 择 是 SPCS设 计 初 期 的重 点 工 作 , 不 仅 要满 足生 产系统 的功能要 求 ,还 必须 考虑 职业 健康、安全和环境(HSE)、可靠性 、可操作性 、经济 性 以及 技术 成 熟 度 。笔 者 以 目前 较 为 常用 的复 合 电液控 制 系统 。。为例 ,结 合 较 为先 进 的 水下 生 产 控 制 系 统u ,介 绍 了 SPCS 的 基 本 组 成 、各 种 SPCS结 构 的优 缺点 以及 设计 时应 考虑 的 因素 。 1 水 下 生产 控 制 系统 的组成
摘 要 :作为水下生产系统的重要组成部分 ,水下生产控制系统(SPCS)提供了数据采集、远程控 制和异 常情况监测处理等功能。 为了满足 SPCS在安全 可靠性 、经济性 和可操作性等方 面的要求 ,研究 了 SPCS的结构设计 ,介绍 了 SPCS的功能 、组成 ,对 比了
独立式 、平衡式 、组合式和环式等多种 SPCS结构 的优缺点 ,分 析了 SPCS设计 应考虑 的因素。最 后 ,得出 了 SPCS结构设计 的
目前 ,水下 生产 系统 已成 为 深水油 气 田开发 中 最 常用 的开 发方 式 j。水 下 生产 系统 通 过水 下 井 口、水 下生产 设 施 、海 底 管线 和脐 带缆 ,将 油气井 生 产 的油 气混 合 物输 送 至依 托 设 施 或 陆 上 终 端 。水 下 生产 系统 能 够适应 深 水油气 田的开 发 ,具 有 开发 成 本低 、建设 周 期短 、开 发效 益高 的特 点 。
水 下 生 产 控 制 系 统 SPCS(subsea production control system)是水 下 生产 系统 的重要 组 成 部分 , 为 水下 生产 提供 安 全 、可 靠 、高效 的数 据 采 集 和 监 控 功能 。SPCS通过 控 制水 下 采 油 树 、水 下 管 汇 等 水 下设 施来 保证 生产 的安全进 行 ,并对 水下 仪表 和 各 控制 模 块 进 行 监 控 。SPCS通 过 控 制 网 络 与 浮 式 生 产 储 卸 油 船 FPSO (floating production storage and offloading,)、浮 式 生 产 装 置 FPU (floating production unit)或 陆 上终 端 等 依 托设 施 的控 制 系统 相连 ,向依 托 设 施 提 供 数 据 ,并 执 行来 自依托 设施 的操 作指 令 j。