激光相位测距原理
激光测距技术原理

激光测距技术原理:1.激光的亮度高。
固体激光器的亮度更可高达1011W/cm2Sr这是因为激光虽然功率有限,但是由于光束极小,于是具有极高的功率密度,所以激光的亮度一般都大于我们所见所有光(包括可见光中的强者:太阳光),这也是激光可用于星际测量的根本原因所在;2.激光的单色性好。
这是因为激光的光谱频率组成单一。
3.激光的方向性好。
激光具有非常小的光束发散角,经过长距离的飞行以后仍然能够保持直线传输;4.激光的相干性好。
我们通常所见到的可见光是非相干光,激光可以做到他们都做不到的事情,比如说切割钢材。
在测距领域,激光的作用更是不容忽视,可以这样说,激光测距是激光应用最早的领域(1960年产生,1962年即被应用于地球与月球间距离的测量)。
测量的精确度和分辨率高、抗干扰能力强,体积小同时重量轻的激光测距仪受到了大多数有测距需求的企业、机构或个人的青睐,其市场需求空间大,应用领域广行业需求多,并且起着日益重要的作用。
一、相位法激光测距技术原理:当今市场上主流的激光测距仪是基于相位法的激光测距仪。
这是因为基于相位法的激光测距仪轻易地就可以克服超声波测距的一大缺陷:误差过大,使测量精度达到毫米级别。
而基于此法的激光测距仪主要的缺点在于电路复杂、作用距离较短(一百米左右,经过众多科学工作者的努力,现在也有作用距离在几百米的相位法激光测距仪)。
相位法激光测距技术,是采用无线电波段频率的激光,进行幅度调制并将正弦调制光往返测距仪与目标物间距离所产生的相位差测定,根据调制光的波长和频率,换算出激光飞行时间,再依次计算出待测距离。
该方法一般需要在待测物处放置反射镜,将激光原路反射回激光测距仪,由接收模块的鉴波器进行接收处理。
也就是说,该方法是一种有合作目标要求的被动式激光测距技术。
如下图所示:由图所显示的关系,我们可以知道,用正弦信号调制发射信号的幅度,通过检测从目标反射的回波信号与发射信号之间的相移φ,通过计算即可以得到待测距离。
激光测距原理

激光测距原理激光测距工作方式上可分为:脉冲激光测距和连续波激光测距。
(1) 脉冲激光测距脉冲激光测距原理是,用脉冲激光器向目标发射一列很窄的光脉冲(脉冲宽度小于50ns),光达到目标表面后部分被反射,通过测量光脉冲从发射到返回接收机的时间,可算出测距机与目标之间的距离。
假设所测距离为h,光脉冲往返时间为t,光在空中的的传播速度为c,则:h=ct/2脉冲激光测距机能发出很强的激光.测距能力较强,即使对非合作目标,最大测距也能达到30000m以上。
其测距精度一般为5米,.最高的可达0.15m。
脉冲激光测距机既可在军事上用于对各种非合作目标的测距,也可在气象上用于测定能见度和云层高度.以及应用在对人造卫星的精密距离测量等领域。
(2)连续波激光测距(相位式激光测距)相位式激光测距仪是用无线电波段的频率,对激光束进行幅度调制并测定调制光往返测线一次所产生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离。
即用间接方法测定出光经往返测线所需的时间。
与脉冲激光测距机相比,连续波激光测距机发射的(平均)功率较低,因而测远距离能力相对较差。
相位式激光测距仪一般应用在精密测距中。
由于其精度高,一般为毫米级,为了有效的反射信号,并使测定的目标限制在与仪器精度相称的某一特定点上,对这种测距仪都配置了被称为合作目标的反射镜。
对非合作目标,相位法测距的最大测程只有1~3km。
若调制光角频率为ω,在待测量距离D上往返一次产生的相位延迟为φ,则对应时间t 可表示为:t=φ/ω将此关系代入式中距离D可表示为D=1/2 ct=1/2 c?φ/ω=c/(4πf) (Nπ+Δφ)=c/4f (N+ΔN)=U(N+)式中:φ——信号往返测线一次产生的总的相位延迟。
ω——调制信号的角频率,ω=2πf。
U——单位长度,数值等于1/4调制波长N——测线所包含调制半波长个数。
Δφ——信号往返测线一次产生相位延迟不足π部分。
ΔN——测线所包含调制波不足半波长的小数部分。
相位测距原理

相位测距原理
相位测距原理是一种基于光的干涉现象的测距方法。
它利用光的波动性质,通过测量光波传播过程中的相位差来确定被测物体到光源的距离。
在相位测距原理中,首先需要发射一束相干光束。
相干光是指波长相同、频率相同、且具有固定的相位关系的光波。
常用的光源有激光器和懒散光源。
当发射的光束照射到被测物体上时,一部分光束会被物体表面反射,另一部分光束则会经过物体表面透射或折射。
被反射的光束和透射或折射的光束分别称为光的参考波和测量波。
参考波和测量波在传播过程中会遇到相位差。
这是由于被测物体到光源的距离不同,导致光波传播的光程差不同所引起的。
光程差是指光波传播过程中参考波和测量波所走过的距离差。
可以通过干涉现象对相位差进行测量。
干涉是指两束或多束光波在空间叠加形成明暗条纹的现象。
当相位差满足一定条件时,就会产生干涉。
在相位测距原理中,通过调整参考波和测量波的相位差,使得干涉现象最大化。
这可以通过改变测量波的光程来实现。
通过改变测量波的光程,可以得到一系列干涉条纹,每个条纹对应着不同的相位差。
通过对干涉条纹的计数、分析和处理,可以确定干涉条纹的数
量,从而得到参考波和测量波之间的相位差。
通过相位差的测量,可以计算出被测物体到光源的距离。
相位测距原理广泛应用于测距仪、激光测绘、激光雷达等领域。
它具有高精度、高分辨率、无需物体与传感器直接接触等优点,是一种重要的测距方法。
激光测距(非常详细)

一、激光测距方程
1、从测距仪发射的激光到达目标上的激光功率 1)对于点目标,目标面积小于激光照亮面积:
Pt Pt Kt At T / As 1
Pt——激光发射功率(W)
Tα ——大气单程透过率 Kt——发射光学系统透过率 At——目标面积(m2) As——光在目标处照射的面积(m2)
d ct 2
测距方法分类
脉冲测距法:测距仪发出光脉冲,经被测目标反射后,光 脉冲回到测距仪接收系统,测量其发射和接收光脉冲的时 间间隔,即光脉冲在待测距离上的往返传播时间t。脉冲法 测距精度大多为米的量级; 相位测距法:它是通过测量连续调制的光波在待测距离上 往返传播所发生的相位变化,间接测量时间t。这种方法测
我国卫星测距站
卫星激光测距应用
卫星激光测距(Satellite Laser Ranging:SLR)是
随着现代激光、光电子学、 计算机和空间科学发展而建立
起来的一门崭新观测技术。由于它具有独特的测距方式和 较高的测量精度,已在地学领域广泛应用。目前,其观测资 料已可用于地球物理学、地球动力学、大地测量学、天文 学和地震预报等多种学科。
2、小的激光发散角: 措施:增大扩束准直系统的角放大率。 3、高透过率光学系统;
4、大的接收孔径角;
5、大目标对测距有利; 6、高灵敏度探测器。
二、光电读数
1 1 N 1 因为 s ct c f ( fT 为晶振频率;T ) T 2 2 fT 测距仪的最小脉冲正量δ为:
令N=1
SPAD
接收望远镜
箱
测距精度与激光脉宽
测距精度是由于激光脉冲前后沿时间差造成的; 因此激光脉冲宽度影响测距精度: L C t
激光相位法测距原理

激光相位法测距原理
激光相位法测距原理是基于激光的波长和相位差的变化来测量物体距离的一种方法。
它利用激光器发射出的单色激光束照射到物体上,经过反射后,激光束返回激光器,通过测量激光束的相位差来计算物体到激光器的距离。
具体原理是:激光器发射出的激光束经过透镜聚焦后,照射到物体上。
激光束被物体反射后,重新聚焦,经过分束器分成两束,一束经过参考光路,另一束经过测量光路,最后再次汇聚到探测器上。
由于光路长度不同,两束光的相位会有一定的差异,这个差异就是物体到激光器的距离。
测量时,探测器会将两束光的相位差转换成电信号,然后经过计算和处理,得到物体到激光器的距离。
由于激光的波长很短,可以达到纳米级精度,因此激光相位法测距具有高精度、高分辨率、高稳定性等优点,广泛应用于工业、航空、航天等领域。
激光干涉法测距原理
激光干涉法测距原理
激光干涉法是一种常用的测量距离的方法。
它基于激光在空间中传播时受到干涉效应的原理,通过测量干涉条纹的参数来确定两点之间的距离。
激光干涉法的原理是利用激光光源发出的激光束,将其分成两束,一束被称为参考光束,另一束被称为测量光束。
这两束光线经过分束器分开后,通过反射或折射到达被测物体或目标表面。
其中一束光束被反射或折射回来,与另一束光束进行干涉。
当这两束光线重合时,由于光的波动性质,会出现干涉现象。
在干涉区域内,两束光线叠加会形成明暗交替的干涉条纹。
这些干涉条纹的形状和参数与两束光线之间的相位差有关,而相位差又与两点之间的距离有关。
通过对干涉条纹的分析和测量,可以得到干涉条纹的周期、强度、位置等参数,从而计算出两点之间的距离。
一般而言,通过调节其中一束光线的路径长度或改变光程差,可以改变干涉条纹的特征,进而精确测量出两点之间的距离。
激光干涉法具有测量精度高、测量范围大、非接触式测量等优点,因此在工程测量、制造业以及科学研究等领域得到了广泛应用。
相位法激光测距原理及算法详解
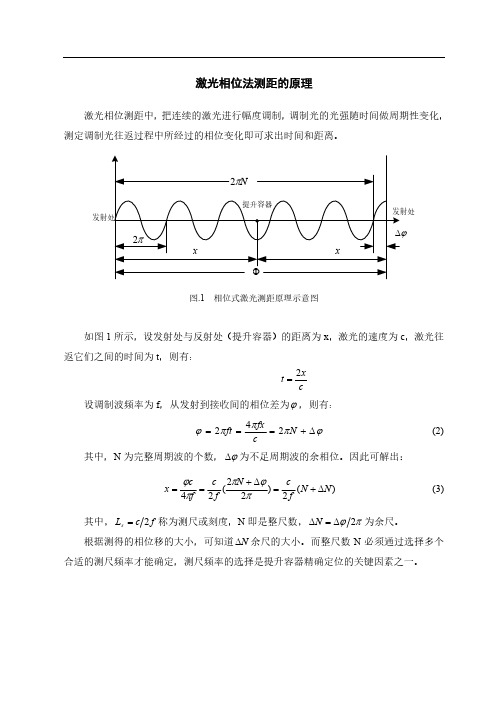
激光相位法测距的原理激光相位测距中,把连续的激光进行幅度调制,调制光的光强随时间做周期性变化,测定调制光往返过程中所经过的相位变化即可求出时间和距离。
图.1 相位式激光测距原理示意图如图1所示,设发射处与反射处(提升容器)的距离为x ,激光的速度为c ,激光往返它们之间的时间为t ,则有:cxt 2设调制波频率为f ,从发射到接收间的相位差为 ,则有:N cfxft 242 (2) 其中,N 为完整周期波的个数, 为不足周期波的余相位。
因此可解出:)(2)22(24N N fcN f c f c x(3) 其中,f c L s 2 称为测尺或刻度,N 即是整尺数, 2 N 为余尺。
根据测得的相位移的大小,可知道N 余尺的大小。
而整尺数N 必须通过选择多个合适的测尺频率才能确定,测尺频率的选择是提升容器精确定位的关键因素之一。
多尺测量方法测量正弦信号相移的方法都无法确定相位的整周期数,即不能确定出相位变化中 2的整倍数N ,而只能测量不足 2的相位尾数 ,因此公式(2.3)中的N 值无法确定,使该式产生多个解,距离D 就不能确定。
解决此缺陷的办法是选用一个较低的测尺频率s f ,使其测尺长度s L 稍大于该被测距离,这种状况下不会出现距离的多值解。
但是由于测相系统的测相误差,会导致测距误差,并且选用的s L 越大则测距误差越大。
因此为了得到较高的测距精度而使用较短的测尺长度,即较大的测尺频率s f ,系统的单值测定距离就相应变小。
为了解决长测程和高精度之间的矛盾,一般使用的解决办法是:当待测距离D 大于基本测尺sb L (精测测尺)时,可再使用一个或几个辅助测尺sl L (又叫粗测测尺),然后将各个测尺测得的距离值组合起来得到单一的和精确的距离信息。
由此可见,用一组测尺共同对距离D 进行测量就可以解决距离的多值解,即用短尺保证精度,用长尺保证量程。
这样就解决高精度和长测程的矛盾[4]。
本系统选用10米作为精尺,1000米作为粗尺,带入公式即可求得精尺频率和粗尺频率:精尺频率 MHz L cf 152510(4) 粗尺频率 kHz L cf 150210001000 (5) 其中,光速s m c /1038 。
相位式激光测距——间接tof法

相位式激光测距——间接tof法全文共四篇示例,供读者参考第一篇示例:相位式激光测距是一种常用的测距方法,它通过测量光波的相位差来确定物体与传感器之间的距离。
而间接TOF(Time of Flight)法则是一种常见的相位式激光测距方法之一,其原理是通过测量光波往返传播的时间来计算距离。
本文将详细介绍相位式激光测距及间接TOF法的基本原理、应用领域以及优缺点。
一、相位式激光测距的基本原理相位式激光测距利用了光波的波长特性,通过测量光波的相位差来确定距离。
在相位式激光测距中,激光器向目标发射一束光波,光波经过目标反射后返回传感器,传感器接收到反射光波并测量与发射光波的相位差,通过相位差的变化来计算目标与传感器之间的距离。
相位式激光测距的精度通常很高,可以达到亚毫米级别。
二、间接TOF法的原理及优缺点间接TOF法是相位式激光测距的一种常见方法,其原理是通过测量光波往返传播的时间来计算距离。
具体来说,激光器向目标发射一束光波,光波经过目标反射后返回传感器,传感器测量光波往返的时间并将其除以光速来计算距离。
间接TOF法的优点在于测距精度高、测量速度快、适用于长距离测距等特点,但其缺点是受到光波传播速度波动的影响,可能在复杂环境中出现误差。
相位式激光测距在工业、汽车、航空航天等领域有着广泛的应用。
在工业领域,相位式激光测距可以用于精密加工、质量检测等工作中;在汽车领域,相位式激光测距可以用于自动驾驶、停车辅助等功能;在航空航天领域,相位式激光测距可以用于飞行器导航、高精度测绘等应用。
四、结论相位式激光测距是一种精确、高效的测距方法,间接TOF法作为其中一种方法,在实际应用中具有一定优势和局限性。
相位式激光测距在各个领域都有着重要的应用价值,未来随着技术的不断进步和应用领域的拓展,相位式激光测距将会得到更广泛的应用和发展。
【本文2000字,已完整】第二篇示例:相位式激光测距是一种常用的激光测距方法,通过测量激光光束的相位变化来计算目标物体的距离。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
激光相位测距原理
激光相位测距是一种高精度测量距离的技术,其原理是利用受测
物体反射的激光光束与光源发出的激光光束之间的相位差来计算距离。
激光相位测距系统由激光发生器、光学系统、光电探测器和数据
处理器组成,其中最关键的部分是光学系统。
激光光束从发光器发出后,经由激光器发生器准直后送入距离测
量区域。
受测物体反射的激光光束再次经过激光器发生器,进入光电
探测器后,将信号转化为电信号。
根据物理学原理,光在传播过程中会发生折射和反射等现象,从
而导致光程差发生变化,引起光的相位差。
由于激光的相位差与反射
光路的长度成正比,因此通过测量激光两次入射和反射的光程差得到
的相位差,就可以计算出受测物体的距离。
在激光相位测距技术中,主要应用了光干涉原理、反射原理以及
光电探测技术。
其中,光干涉原理强调了光的相位差,反射原理强调
了光的反射和折射,光电探测技术则是将光信号转化为数字信号进行
计算和处理。
激光相位测距技术具有高精度、高灵敏性、高速度的特点,常用
于地质勘探、测量建筑物高度、制造业检测、制造高精度仪器等领域。