松下伺服电机行星减速机直角减速机
电机减速器的选型计算实例
电机减速器的选型计算实例集团企业公司编码:(LL3698-KKI1269-TM2483-LUI12689-ITT289-电机减速机的选型计算1参数要求配重300kg,副屏重量为500kg,初选链轮的分度圆直径为164.09mm,链轮齿数为27,(详见misimi手册P1145。
副屏移动的最大速度为0.5m/s,加速时间为1s。
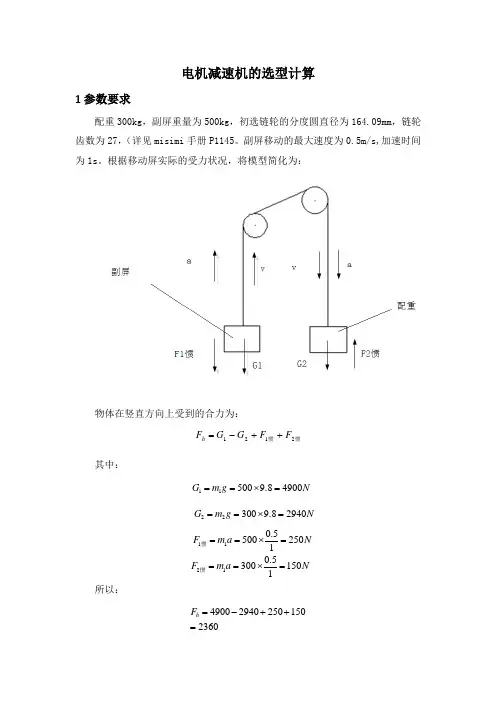
根据移动屏实际的受力状况,将模型简化为:物体在竖直方向上受到的合力为:其中:所以:合力产生的力矩:其中:r为链轮的半径链轮的转速为:2减速机的选型速比的确定:初选电机的额定转速为3000r/min初选减速器的速比为50,减速器的输出扭矩由上面计算可知:193.6262Nm3电机的选型传动方式为电机—减速机—齿轮-链轮-链条传动,将每一级的效率初定位为0.9,则电机的扭矩为:初选电机为松下,3000r/min,额定扭矩为:9.55Nm,功率3kw转子转动惯量为7.85X10-4kgm2带制动器编码器,减速器为台湾行星减速器,速比为50,额定扭矩为650NM 4惯量匹配负载的转动惯量为:转换到电机轴的转动惯量为:惯量比为:电机选型手册要求惯量比小于15,故所选电机减速器满足要求减速机扭矩计算方法:速比=电机输出转数÷减速机输出("速比"也称"传动比")知道电机功率和速比及,求减速机扭矩如下公式:减速机扭矩=9550×电机功率÷电机功率输入转数×速比×使用系数知道扭矩和减速机输出转数及使用系数,求减速机所需配电机功率如下公式:电机功率=扭矩÷9550×电机功率输入转数÷速比÷使用系数。
直角减速机原理
直角减速机原理
x
【直角减速机原理】
直角减速机是通过两个减速机齿轮组成的机构,能够将传入轴上的较高转速和较大扭矩转换为低转速和低扭矩,被广泛应用于各种机械设备中。
原理:直角减速机的基本原理可以概括为:由两个异向又相似的减速机齿轮组成,使传入轴上的转矩转换为输出轴上的较小转矩,同时减小传入轴转速,从而实现电机中大转速和扭矩转换到小转速和小扭矩的功能。
通常所用的直角减速机齿轮为内齿轮和外齿轮,当内齿轮转动时,外齿轮依据圆周运动定律,受到内齿轮的带动便跟着转动,而外齿轮的转动自然带动驱动部件的变换。
由于内齿轮和外齿轮组成不同的传动比,因此可以根据需要将较大的转矩和转速转化为较小的转矩和转速。
应用:直角减速机结构简单、传动效率高,广泛应用于各种机械设备,比如用来控制驱动器转速或传动器速度的应用,可以提供很大的传动比,这对于减少物理损耗起着重要的作用。
此外,直角减速机还可以用于改变传感器类型的传感器,用于检测瞬时力场、负载变化,以及用于调整某些设备的准确性等等。
- 1 -。
电机、减速器的选型计算实例(精编文档).doc
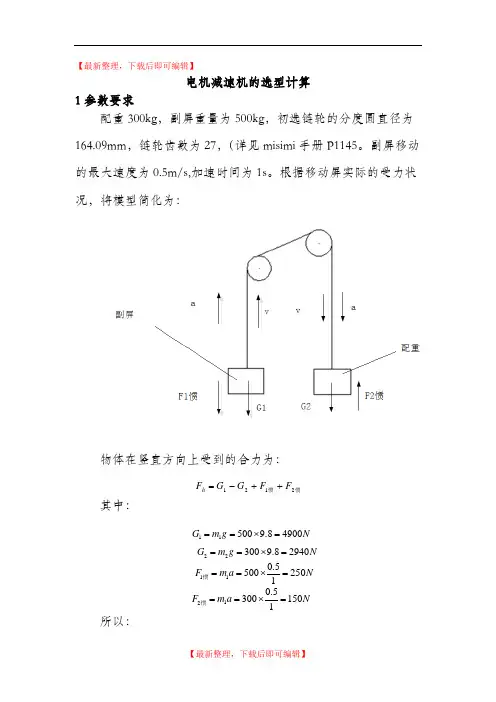
【最新整理,下载后即可编辑】电机减速机的选型计算1参数要求配重300kg ,副屏重量为500kg ,初选链轮的分度圆直径为164.09mm ,链轮齿数为27,(详见misimi 手册P1145。
副屏移动的最大速度为0.5m/s,加速时间为1s 。
根据移动屏实际的受力状况,将模型简化为:物体在竖直方向上受到的合力为:惯惯2121F F G G F h ++-=其中:115009.84900G m g N ==⨯=223009.82940G m g N ==⨯=110.55002501F m a N ==⨯=惯 120.53001501F m a N ==⨯=惯 所以:490029402501502360h F =-++=合力产生的力矩:0.1640923602193.6262h M F rNm =⨯=⨯= 其中:r 为链轮的半径链轮的转速为:0.5 6.1/0.082v w rad s r === 6.1(1/60)58.3/min 22w n r ππ=== 2减速机的选型速比的确定:初选电机的额定转速为3000r/min300051.558.3d n i n === 初选减速器的速比为50,减速器的输出扭矩由上面计算可知:193.6262Nm3电机的选型传动方式为电机—减速机—齿轮-链轮-链条传动,将每一级的效率初定位为0.9,则电机的扭矩为:44193.62 5.9500.9d M T Nm i η===⨯ 初选电机为松下,3000r/min ,额定扭矩为:9.55Nm ,功率3kw 转子转动惯量为7.85X10-4kgm 2带制动器编码器,减速器为台湾行星减速器,速比为50,额定扭矩为650NM4惯量匹配负载的转动惯量为:222(500300)0.082 5.4J mr kgm ==+⨯=转换到电机轴的转动惯量为:31225.4 2.161050J J i -===⨯ 惯量比为:3142.1610 2.757.8510d J J λ--⨯===⨯ 电机选型手册要求惯量比小于15,故所选电机减速器满足要求减速机扭矩计算方法:速比=电机输出转数÷减速机输出转数("速比"也称"传动比") 知道电机功率和速比及使用系数,求减速机扭矩如下公式: 减速机扭矩=9550×电机功率÷电机功率输入转数×速比×使用系数知道扭矩和减速机输出转数及使用系数,求减速机所需配电机功率如下公式:电机功率=扭矩÷9550×电机功率输入转数÷速比÷使用系数。
全球最具影响力的十大机器人减速机品牌
全球最具影响力的十大机器人减速机品牌近年来人力和原材料的上涨给中国制造业带来了巨大的压力,加上发达国家正试图用高度自动化技术来取代中国的制造,一些觉醒的企业已经开始升级自动化,提高工作的生产效率和降低成本。
机器自动化已经成为全球制造业的发展的方向,尤其是机器人产业得到了迅速的发展。
据预测到2015年,中国机器人市场需求将达35000台,占全球比重16.9%,成为全球规模最大的市场。
有如此巨大的市场,自动化行业巨头都在虎视眈眈,纷纷进入中国布局。
中国各地同时掀起了机器人产业大潮,但与外国机器人相比竞争力差距很大,尤其是机器人的零部件,目前大多数国内机器人的零部件都是进口的。
机器人零部件主要由伺服运动控制、减速机等组成,在减速机方面目前国内的上海电机和秦川发展两家企业开始投入研发,以下盘点一下全球最有影响力的十家减速机品牌。
日本帝人减速机(Nabtesco)日本帝人公司(纳博特斯克(Nabtesco))是一家居世界领先地位的精密传动控制系统及组件制造商。
帝人精密减速机在对减速机有特殊要求的行业尽显技术优势,其中RV系列在机器人行业应用中处于非常大的领先地位,而其后推出的RD系列是在拥有世界机器人市场上使用超过200万台骄人业绩的RV系列减速机基础上进行改良,使其使用上更加方便容易。
帝人Nabtesco RVRDRA系列减速机具有高可靠性、高刚性、高精度比、转矩大、轴向尺寸小等特点,为了直接支持较大载荷,内部装有大型角接触球轴承,采用双支撑支持机构和针轮机构,即使施加高达五倍额定转矩时,产品也不会损坏。
帝人Nabtesco RVRDRA 系列减速机特别适用于频繁正反转,对精度和刚度有高要求,对轴向尺寸要求短的行业领域。
Nabtesco製造RV减速器具有长期使用不需再加润滑剂、寿命长、刚度好、减速比大、低振动、高精度、保养便利等优点,适用于在机器人上使用。
其它运用,如:工业机器人、。
电机、减速器的选型计算实例
电机减速机的选型计算1参数要求配重300kg ,副屏重量为500kg ,初选链轮的分度圆直径为164.09mm ,链轮齿数为27,(详见misimi 手册P1145。
副屏移动的最大速度为0.5m/s,加速时间为1s 。
根据移动屏实际的受力状况,将模型简化为:物体在竖直方向上受到的合力为:惯惯2121F F G G F h ++-=其中:115009.84900G m g N ==⨯=223009.82940G m g N ==⨯=110.55002501F m a N ==⨯=惯 120.53001501F m a N ==⨯=惯 所以:490029402501502360h F =-++=合力产生的力矩:0.1640923602193.6262h M F rNm =⨯=⨯= 其中:r 为链轮的半径链轮的转速为:0.5 6.1/0.082v w rad s r === 6.1(1/60)58.3/min 22w n r ππ=== 2减速机的选型速比的确定:初选电机的额定转速为3000r/min300051.558.3d n i n === 初选减速器的速比为50,减速器的输出扭矩由上面计算可知:193.6262Nm3电机的选型传动方式为电机—减速机—齿轮-链轮-链条传动,将每一级的效率初定位为0.9,则电机的扭矩为:44193.62 5.9500.9d M T Nm i η===⨯ 初选电机为松下,3000r/min ,额定扭矩为:9.55Nm ,功率3kw 转子转动惯量为7.85X10-4kgm 2带制动器编码器,减速器为台湾行星减速器,速比为50,额定扭矩为650NM4惯量匹配负载的转动惯量为:222(500300)0.082 5.4J mr kgm ==+⨯=转换到电机轴的转动惯量为:31225.4 2.161050J J i -===⨯ 惯量比为: 3142.1610 2.757.8510d J J λ--⨯===⨯ 电机选型手册要求惯量比小于15,故所选电机减速器满足要求减速机扭矩计算方法:如下公式:减速机扭矩=9550×电机功率÷电机功率输入转数×速比×使用系数知道扭矩和减速机输出转数及使用系数,求减速机所需配电机功率如下公式:电机功率=扭矩÷9550×电机功率输入转数÷速比÷使用系数。
AB115-L1-S2-P2行星斜齿减速机伺服,松下电机减速机

特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.AB系列精密伺服行星减速机:分AB40、AB60、AB90、AB115、AB142、AB180、AB220、AB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:AB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
AB系列精密行星减速机性能参数:AB系列精密行星减速机转动惯量:配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
伺服电机匹配行星减速机的方法
伺服电机匹配行星减速机的方法
伺服电机匹配行星减速机的方法包括以下步骤:
1. 确定减速器的类型:根据应用需求,选择适合的减速器类型。
伺服电机匹配的行星减速器通常分为直齿、斜齿、方法兰和圆法兰等类型。
2. 确定减速器的规格:减速器的规格通常与伺服电机的功率有关。
根据电机的功率,选择相应规格的行星减速机法兰。
3. 确定减速器的减速比:减速比是根据需要伺服电机达到的效果来确定的。
可以询问技术人员所需的减速比,或者根据减速器扭矩和电机扭矩进行计算。
4. 计算减速器的扭矩:根据电机的工作条件,计算出减速器的输出扭矩。
减速器的额定扭矩应大于或等于电机的额定扭矩乘以减速比。
5. 确定减速器的精度:根据具体工作要求,选择适合的减速器精度等级。
一般来说,用于伺服电机的减速器间隙不应大于15arcmin,等级区分为P1、P2、P0。
6. 考虑其他因素:在选择伺服电机匹配的行星减速机时,还需要考虑其他因素,如减速机的刚性、质量、使用寿命和维护要求等。
综上所述,伺服电机匹配行星减速机的方法需要综合考虑多个因素,包括减速器类型、规格、减速比、扭矩、精度和其他因素。
只有选择合适的减速器才能达到理想的效果。
松下伺服马达A5的性能特点
松下伺服马达A5的性能特点据日弘忠信了解,松下伺服马达A5是目前国内用得最多、需求量最大、市场覆盖率最高的伺服产品之一,这是因为它具有超高速响应、智能化、更轻巧、使用方便、安全等级高等优势,在此,我们主要介绍其安全等级。
松下伺服马达A5的畅销离不开其安全等级更高的特性,松下A5系列伺服电机的安全等级达到IP67标准。
采用与电机电源、编码器输入输出部直接连接的连接器,使电机的密封性得以提高,达到IP67标准,同时电机的耐环境性也更高。
安全等级IP67,6的意思是防异物,防止因完全接触而侵入灰尘;7是防水,对规定压力时间内的渗水进行保护。
2013年9月,松下公司又推出松下A52伺服电机系列,其性能更高过A5系列电机。
松下伺服马达A5拥有良好的速度控制特性,整个速度区内可实现平滑控制,几乎无振荡;高效率,90%以上,不发热,高速控制。
高精确位置控制(取决于何种编码器),额定运行区域内,实现恒力矩,低噪音,没有电刷的磨损,免维护,不发生磨损颗粒、没有火花,适用于无尘间、易暴环境。
伺服主要靠脉冲来定位,基本上可以这样理解,松下伺服马达A5接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机自身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
深圳市日弘忠信电器有限公司是一家集品牌代理、产品配套、解决方案、工程服务于一体的运营服务商。
公司秉承“共赢发展,忠信为本”的经营理念,自成立以来,不断引入欧、日、台及国内名优品牌工业自动化产品,服务于广大自动化机械设备厂商,在业内拥有较高知名度。
四种减速机配伺服电机详情
斜齿轮伺服减速机:是通用性强、组合性好、承载能力高、齿轮间隙小,定位精度高、传动比准确的一种减速器,它不仅很方便地与各家交流伺服电机,直流伺服电机相连接,而且效率高、振动小、允许有高的轴伸径向载荷。
性能与特点:1、齿轮采用优质合金渗碳淬火,齿面硬度高达60±2HRC,齿面磨削精度高达5-6级2、采用计算机修形技术,对齿轮进行预修形,大大提高了减速机的承载能力3、从箱体至内部齿轮,采用完全的模块化结构设计,适合大规模生产及灵活多变的选型4、标准减速机型号按扭矩递减形式划分,与传统的等比例划分相比,更符合客户要求,避免了功率浪费5、采用CAD/CAM设计制造,保证质量的稳定性6、采用多种密封结构,防止漏油7、多方位的降噪措施,确保减速机优良的低噪音性能8、产品安装方式灵活多变,易于客户选用参数:1、规格:PA27/PA37/PA47/PA57/PA67/PAR77/PA87/PA97/PA107/PA1 27/PA147/PA1672、速比:1:4,1:5,1:6,1:8,1:9,1:10,1:12,1:15,1:18,1:22,1:25,1:30,1:35,1:40,1:50,1:60,1:75,1:90,1:100,1:120,1:150,1:200,1:250,1:300, 1:400,1:500,1:600,1:800,1:1000,1:1500,1:2000,1:2500,1:30003、输入转速:1000-4000r/min。
4、输出转矩:50至15000Nm 。
5、电机功率:0.1~250kw。
6、安装形式:立式安装卧式安装。
应用场合:钢铁冶炼、环保设备、输送运输、起重建筑、石油化工、空港码头、木板造纸、玻璃陶瓷、烟草、食品、船舶运输、啤酒饮料、纺织印染、自动电梯、交通桥梁、汽车工业、航空航天、立体停车库与机械动力等精密定位领域。
伺服电机用蜗轮蜗杆减速机
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE减速机特点:为圆形法兰输出方式,具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达的减速传动。
精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
技术参数:外形尺寸: 40mm---160mm减速比: 3---512传递力矩: 5Nm---895Nm精密侧隙:≤5arcmin安装方式:任意PLE型号及速比:PLE40 PLE60 PLE80 PLE90 PLE120 PLE160 PLE190 PLE200L1级速比(3 4 5 7 8 10)L2级速比(9 12 15 16 20 25 32 40 64)L3级速比(60 80 100 120 160 200 256 320 512)S1光轴 S2单键轴 S3花键轴、P1精密背隙 P2标准背隙 P0超精密 K1光孔 K2单键孔 K3花键孔行星减速机产品特色:.高效率,达95%以上.低噪音,噪音小于64dB.多速比3-1000范围内可选。
.多功率电机匹配,可配套50W-18kW范围内电机.高输出扭矩,高于其它品牌同规格减速机。
.多种类型电机匹配,如步进,交流、直流电机等。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE系列伺服行星减速机可与全球任何厂家所生产的驱动马达产品连接使用,如:安川伺服、台达伺服、东元伺服、埃斯顿伺服、和利时伺服、汇川伺服、广数伺服、大森伺服、华中伺服、凯奇伺服、华大伺服、登齐伺服、雷赛伺服、步进电机、博孚伺服、三洋伺服、松下伺服、富士伺服、三菱伺服、欧姆龙伺服、日立伺服、发格伺服、施耐德伺服、西门子伺服、法那克伺服、科尔摩根伺服、科比伺服、帕克伺服、AMK伺服等伺服电机和步进电机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
KFR系列直角伺服行星减速机:
具有高精度、高钢性、高负载、高效率、高速比、高寿命、低惯性、低振动、低噪音、低温升、外观美、结构轻小、安装方便、精确定位等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.
应用领域:
伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于中等精度程度的工业领域。
如:印刷机床、火焰切割、激光切割、数控机床、工具机械,食品包裝、自动化产业、工业机器人、和自动化的机电产品行业。
性能和特点:
KFR系列直角伺服行星减速机提供了高性价比,应用广泛、经济实用、寿命长等优点,在伺服控制的应用上,发挥了良好的伺服刚性效应,准确的定位控制,在运转平台上具备了中低背隙,高效率,高输入转速,高输入扭矩,运转平順,低噪音等特性,外观及结构设计轻小。
使用免更换的润滑油,及无论安装在何处,都可以免维修操作全封闭式设计,并且具有IP65的保护程度,因此工作环境差时亦可使用。
KFR系列伺服减速机性能参数:
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 200 246 287 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 200 246 287 4200W 215 4-M12 38/42(F7) 115 180(H7) 10 190 200 246 287
配备电机LA LZ S LR LB LE LC L1(一级传动) L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 214 262 300
4200W 215 4-M12 38/42F7 115 180H7 10 192 214 262 300
7500W 235 4-M12 55F7 120 200H7 10 220 214 262 300。