第八章逻辑控制电路赵
电路基础原理理解电路中的电路逻辑与电路控制

电路基础原理理解电路中的电路逻辑与电路控制电路是电子技术的基础,它是由电子元器件组成的一种电子线路。
对于电子工程师而言,了解电路的基础原理尤为重要。
在电路中,电路逻辑和电路控制是两个重要的概念,它们对电路的功能和操作起着至关重要的作用。
首先,我们来讨论电路逻辑。
电路逻辑是指电路中各个电子元器件之间的逻辑关系。
在电子电路中,逻辑电平可以表示为高电平和低电平。
高电平通常表示逻辑“1”,低电平则表示逻辑“0”。
当电路中的信号在逻辑门内传输时,根据逻辑门的真值表,输入的信号将通过门电路的内部布局,最终将输出相应的逻辑结果。
这种逻辑关系在数字电路中起到了重要的作用。
接下来,我们谈谈电路控制。
电路控制是指利用电子元器件或电子系统来控制电路的工作状态。
控制电路可以通过开关、传感器、计时器等实现。
例如,在自动化领域中,我们经常会见到的温度控制器。
这个设备通过控制电流和电压,监测温度并进行相应的控制,确保温度在设定的范围内。
另一个例子是门禁系统,该系统通过读取身份证或密码,控制门的打开和关闭。
这些例子中,电子元器件或电子系统起到了控制电路的作用。
在实际应用中,电路的逻辑和控制往往紧密相连。
逻辑电路可以作为控制电路的输入,通过逻辑判断来控制电路的工作状态。
逻辑门的输出信号可以驱动继电器、触发开关以及其他控制装置。
此外,控制电路中的开关和传感器也能够输出对应的逻辑电平信号,进一步影响电路中的逻辑关系。
电路的逻辑与控制不仅在数字电路中有广泛应用,在模拟电路中也同样重要。
模拟电路中的逻辑通常通过比较电压或电流的大小来判断,并将结果输出到控制电路中。
控制电路则通过增加或减少电流、改变电压等方式控制电路的运行状态。
总之,电路的逻辑和控制是电子工程师必须要理解和掌握的基础知识。
逻辑决定了电路中信号的传输和处理,而控制则实现了对电路的操作和控制。
无论是数字电路还是模拟电路,在实际工程项目中,了解逻辑和控制对于设计和开发电子产品都是至关重要的。
如何使用逻辑门设计和实现电子电路的控制逻辑
如何使用逻辑门设计和实现电子电路的控制逻辑逻辑门是现代电子学中非常重要的基础组件,它可以根据输入信号的逻辑值产生输出信号。
逻辑门的设计和实现对于电子电路的控制逻辑至关重要。
本文将介绍如何使用逻辑门设计和实现电子电路的控制逻辑。
一、逻辑门的基本原理逻辑门是基于逻辑运算的电子元件,它能够根据输入的逻辑信号产生相应的逻辑输出信号。
常见的逻辑门有与门(AND)、或门(OR)、非门(NOT)、与非门(NAND)、或非门(NOR)、异或门(XOR)等。
逻辑门的输入和输出都是高电平(1)或低电平(0),根据输入的不同组合,逻辑门可以实现各种复杂的逻辑控制功能。
二、逻辑门的符号和真值表每种逻辑门都有其独特的符号表示和对应的真值表。
例如,与门的符号是一个圆圈,有两个输入端和一个输出端,真值表显示只有当两个输入信号都为1时,输出信号才为1。
不同的逻辑门有不同的符号和真值表,掌握它们对于设计和实现复杂逻辑电路非常重要。
三、逻辑门的设计和实现步骤1.明确逻辑功能:根据逻辑电路的功能需求,确定所需的逻辑关系,例如判断条件、运算方法等。
2.选择适当的逻辑门:根据逻辑功能的要求,选择合适的逻辑门进行设计和实现。
不同的逻辑门有不同的特点和应用场景,需要根据具体需求做出选择。
3.确定输入和输出:根据逻辑功能,确定所需的输入和输出信号的数量和类型。
例如,与门需要两个输入信号和一个输出信号。
4.绘制逻辑电路图:根据逻辑门的真值表和对应的输入输出关系,画出逻辑电路的图示。
逻辑电路图要清晰简洁,能够直观地表达逻辑关系。
5.根据逻辑电路图,选择合适的逻辑门进行连接和布线。
将逻辑门按照电路图的要求进行连接,确保输入和输出信号的正确传递和逻辑运算。
6.搭建电路原型:根据逻辑电路图,使用逻辑门和其他必要的元器件,搭建电路原型进行测试和验证。
通过观察输出信号和预期结果的一致性,判断逻辑电路的正确性。
7.优化和改进:根据测试和验证的结果,对逻辑电路进行优化和改进。
控制电路的工作原理
控制电路的工作原理
电路控制是通过合理的设计和配置电路元件,以实现特定的功能和控制目标。
控制电路的工作原理主要涉及以下几个方面:
1. 信号传输:控制电路通常需要通过信号传输来实现信息的传递和转换。
信号可以是电流、电压或频率等,在电路中通过导线、电缆或无线电波进行传输。
2. 逻辑运算:控制电路中的逻辑运算是基础的操作,它通过将输入信号进行逻辑运算,并通过输出信号来实现控制目标。
逻辑运算可以包括与门、或门、非门等,通过它们的组合可以实现更复杂的控制逻辑。
3. 时序控制:许多控制电路需要根据特定的时间序列来实现控制目标。
时序控制可以通过计时电路、时钟信号等方式实现,以确保电路按照事先设计的顺序和时间来执行。
4. 脉冲宽度调制(PWM):PWM是一种常用的控制电路技术,通过控制信号的高电平和低电平时间比例来实现对输出的控制。
PWM可以用于调节电机速度、控制亮度等应用场景。
5. 反馈控制:在一些需要持续监测和调整的控制电路中,反馈控制起着重要的作用。
通过采集反馈信号并与设定值进行比较,可以实现对输出信号的动态调整和稳定控制。
除了以上几个方面,控制电路的工作原理还与具体应用场景和
控制目标有关。
因此,在设计和实现控制电路时,需要根据具体情况进行综合考虑和优化。
【doc】以X-D图设计逻辑控制电路
以X-D图设计逻辑控制电路中国砚代教甫装备2007年第9期(总第55期)以X—D图设计逻辑控制电路廖伟超佛山高明区技工学校广东佛山528500摘要:本文针对逻辑控制电路设计过程中的一些实际问题,特别是执行元件的动作多于2n个信号时,采用x—D图(信号一动作图)可以较直观,较容易实现.关键词:X—D图逻辑控制电路仿真一,一般逻辑控制电路的实现方案和设计方法一般逻辑控制电路的实现方案可以用继电器,数字逻辑电路,单片机,PLC(可编程逻辑控制器),PLD(可编程逻辑控制元件)等来实现.除用PLC的步进指令外,其他的一般都要进行逻辑设计,常见逻辑设计的方法有:1.经验设计;2.如果是组合逻辑电路,先根据电路要求列出真值表,后写出逻辑表达式,直接或通过卡诺图化简逻辑表达式从而画出逻辑图;3.如果是时序逻辑电路先根据电路要求作出状态图或状态表,简化状态,确定触发器个数和特性方程,经过化简得出组合逻辑表达式和触发器的驱动方程,画出逻辑图.二,萌发采用X-D图设计逻辑控制电路的原因由于采用经验设计方法来设计很大程度上限于设计者的设计经验,但碰到难度较大的程序方案时,比较难按部就班地进行设计,对于采用逻辑化简的方法,特别对于时序逻辑电路的设计难度较大,而采用x—D图来设计逻辑控制电路,对于信号与执行动作的关系一目了然,较直观,较容易地解决问题.同时结合Electron—iCSWorkbench软件进行仿真,可以直接检查程序的对错,便于针对出现问题进行修改,且最后得出的结果可收稿日期:2007—03—14作者简介:廖伟超,男,大学本科,助教..6直接用于数字逻辑电路,PLD,和西门子的通用逻辑控制模块LOGO等方案.其他的如继电器,PLC基本指令等通过逻辑关系转换也不难得出.三,以X—D图设计逻辑控制电路经过实践,该方法能较直观,顺利地设计逻辑控制电路,现以一有防爆要求的食品加工机械逻辑控制电路的设计作说明:1.动作过程与电气控制要求该系统为两缸往复系统,系统由两个双作用单出杆气缸组成执行机构,分别以A,B表示,每个循环有六个动作,分别是:(1)A缸伸出从1—至『L2(2)A缸退回从2—1(3)B缸伸出从3—4(4)B缸退回从4—3(5)B缸伸出从3—4(6)B缸退回从43(7)在按下手动开关q之后,A,B,两个气缸按给定的程序自动运行,并能连续循环动作.2.动作说明A,B——分别代表两个双作用气缸A1,B1——分别代表两个气缸的伸出动作.A0,B0——分别代表两个气缸的退回动作.傩@2.膨2007年第9期(总第55期)中国砚贰教育装备ai,bl——分别代表两个气缸伸出位置开关发出的信号.aO,bO——分别代表两个气缸退回位置开关发出的信号.AI*,Bl术——分别代表两个气缸伸出时的执行信号(驱动电磁铁的信号).AO*,BO术——分别代表两个气缸退回时的执行信号(驱动电磁铁的信号).3.程序流程图说明:气缸的动作顺序如下闭合开关q—A缸伸出一A缸退回一B缸伸出一B缸退回一B缸伸出一B缸退回. ao,bo,al,bt,分别为气缸到位后由位置开关发出的原始信号.4.校核程序N个执行元件的程序有2N个位置开关,N对位置开关组合起来有2种不同状态最多可控制2w个动作的程序.实际程序中,由于一执行元件多次动作,整个程序中动作次数多于2w次,或由于位置开关组合达不~I]2N 种,程序中不同动作将由同一个控制信号组合来控制.这样系统会出现误动作或卡死,这就需要校核程序.(i)列程序相位,信号关系表行程程序中存在标准程序和非标准程序.行程程序用同一信号组合控制不同动作,部分执行信号既不能用原始信号又不能在原始信号"与"组合中找到,需要增加记忆元件(触发器)的程序为非标准程序;行程程序中每一个动作都由不同的信号组合来控制,则该程序为标准程序.因此判断该系统行程程序是否为标准程序, 可检查最小项,有重复小项出现的是非标准程序,无重复小项出现的是标准程序.下面通过程序相位,信号关系表说明程序校核过程(见表i):表i程序相位,信号关系表相位I11l1l1l1I1程序名稚IAAolBIBolBtIBo终端信号qQ1QobIbob1bo(bo)信号a舢Q1Qo舢组合bb.bob0b】boblbo二进制表示最小项(oo)10O0O1O0O1O0十进制表示最小项(O)20l0l00一——I-?IIl一一l'I插入元件▲×i▲Yi▲Xo▲由于出现0~0,i~i重复项,即aobo要控SUB.两次动作,aobt要控制B.两次动作,故该程序为非标准程序, —一,邑嬲@需另加入记忆元件▲X?,▲Y?,▲Xo,▲Y o,如上表所示, 分断重复小项区间段.新程序为【AlX1AoB1Y1BoXoB1Y oBo】(2)校核新程序(见表2)表2插入记忆元件后程序相位,信号关系表相位J1J2J3J4I5J6I7I8I9J10程序名称lAl×lAoIBllI&llBllY0l&终端信号q1)aQ0by1bobbD(b.)二进制表十(i0O0)(0010)(0111)(0O01)(0100)示最小项'(1010)(01i0)(O011)(0i0i)(0CO0)十进制表示最小项(0)8i026731540由于没有出现重复项,故该程序为标准程序.5.绘制X—D图行程程序的整个设计过程中,可采用X—D图求出标准程序的逻辑表达式(各个动作的执行信号).X-D图其特点是直观性强,并且在X—D图中可直接看出行程信号和被控缸的动作状态,能按一定的方法和原理找出并排除障碍信号,求出各程序动作的执行信号.(1)X-D图的概念X—D图法又称X—D图线法(信号——动作状态图法简称).它根据行程程序的工作程序将执行动作和信号在整个循环过程中的状态用相应的图线表示在X—D图中,并从该图中找出并排除障碍,求出被控程序动作的执行信号.(2)X—D图的绘制步骤①绘X—D图方格线绘X—D图方格线,将已知程序相位填入最上面小方格中,并填入相应程序的动作符号;最右边填写求出的执行信号;最左边由上到下分2N格,N为气缸数+记忆元件数,图中分8格,填入气缸两个动作符号,并填入该动作主控信号及记忆元件输出和控制信号.如At动作主控信号为bo,将At,bo都填入一格;Bt的两次动作主控信号为ao~13xo,则Bl,ao,xo,都填入一格,同样可填其它气缸动作和主控信号.②绘制动作线(D线)按行程程序表示的次序画出程序动作从起点到终点的横线,该横线称动作线,其上下位置与最左纵栏中动作符号相对应,横线起点用"0"表示,终点用"×"表示,连接线用粗实线画出,B缸两次伸出和退回动作都应在相应栏中画出.③绘制信号线(X线)按程序的次序画出信号从起点到终点的横线,该横.7中国砚代苏唷装各2007年第9期(总第55期)线称信号线,其上下位置应与最左纵栏信号符号相对应,起点用"0"表示,终点用"×"表示,连接线用细实线表示.④绘制x—D图应注意的问题A.程序的最未一个动作和第一个动作应看成是闭合的,即第10相位的B.动作后紧接着第1相位的A动作.B.程序的纵向分界线是执行元件和位置开关的切线,信号起点就是信号开始执行点.C.位置开关发出的都是长信号,即气缸动作到位后,相应的行程阀一直有信号,并且保持到气缸相反动作的开始.⑤绘Nx—D工序动作状态图X-一D1234567891D执行信号蛆A'×'AnR'Y'R门×力R'YR a:q.bo.1b0-A'X0.y0×1:x12AoaO:Ba0.Y03XO(R1X1?X0.y1y1B矗y1x1.4yo日nyo.X0a1X1=a15×16boVV×0___X口!b0y1b1———{Y;-b1.Xl7Y18b1—Yb1.x0Y0图1X—D图(3)以X—D图求出各动作的执行信号①障碍信号或信号的障碍两种情况A.I型障碍——主控信号本身比动作信号线长.B.II型障碍——由于主控信号多次出现,障碍被控制动作.C.用"…"表示信号的障碍段.②排除障碍的方法与过程并求出逻辑表达式A.逻辑"与"门排障法——在X—D图中利用主控信号与制约信号的选取将长信号变成短信号,可排除I,II型障碍.排除障碍原则是保留主控信号的执行段,去掉障碍段,自由段可保留可去掉.B.列写执行信号:将主控信号排除障碍后填入X—D8'图最右一栏,从而写出各动作执行信号.6.绘制逻辑控制原理图根据执行信号的逻辑表达式画出逻辑图:图2逻辑控制原理图四,用EIectronicsWorkbench软件进行仿真通过用E1ectroniCSWorkbench软件进行仿真可以确认程序是正确的,但在第1,2,3相位Bo,还有动作,第4,5相位A还有动作,这对于气动和液压控制没有影响,但如果是用电动机拖动的电路就会出现在该相位堵转,因此用电动机拖动的电路还要给Bo,Ao*找制约信号得Bo=ylX1+yo.Xob0;Ao=x1.bo再仿真,程序能满足控制要求.五,结束语综上所述采用X—D图能简单,直观,合理地设计逻辑控制电路,由于应用时间不长,还没有很系统地分类整理,今后将进一步研究.参考文献[1]康华光主编.电子技术基础数字数字部分[M].北京:高等教育出版社,1998[2]许福玲,陈尧明主编.液压与气压传动[M].北京:机械工业出版社,2OO2[3]王划一主编.自动控制原理[M].北京:国防工业出版社,2OO1。
逻辑电路习题解答
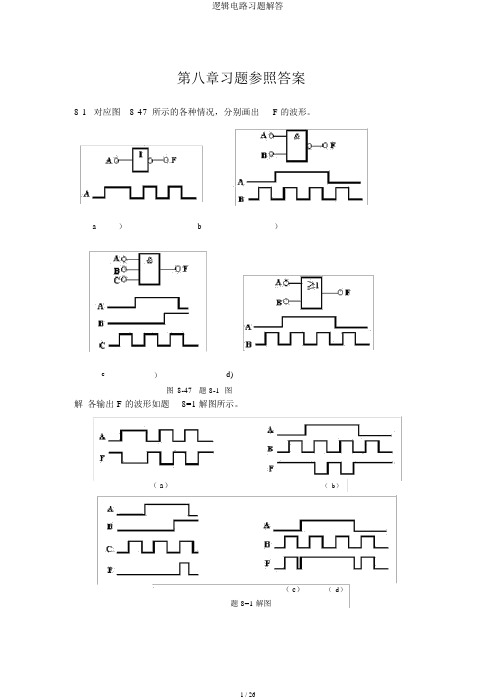
第八章习题参照答案8-1对应图8-47所示的各种情况,分别画出 F 的波形。
a)b)c)d)图8-47题 8-1图解各输出 F 的波形如题8=1 解图所示。
( a)(b)( c)(d)题 8=1 解图8-2 若是“与”门的两个输入端中, A 为信号输入端, B 为控制端。
设 A 的信号波形如图 8-48 所示,当控制端 B=1 和 B=0 两种状态时,试画出输出波形。
若是是“与非”门、“或”门、“或非”门则又如何?分别画出输出波形,最后总结上述四种门电路的控制作用。
图 8-48题8-2图解各种门电路的输出波形如图5- 4 所示。
与门与非门或门或非门图 5-4 习题 5- 2 的解图它们的控制作用分别为:(1)与门:控制端 B 为高电平时,输出为 A 信号;控制端 B 为低电平时,输出为低电平。
( 2)与非门:控制端 B 为高电平时,输出为 A 信号;控制端 B 为低电平时,输出为高电平。
( 3)或门:控制端 B 为高电平时,输出为高电平;控制端 B 为低电平时,输出为 A 信号。
( 4)或非门:控制端 B 为高电平时,输出为低电平;控制端 B 为低电平时,输出为A信号。
8-3 对应图 8-49 所示的电路及输入信号波形,分别画出 F 、 F 、 F 、 F 的波形。
1234a)b)c)d)e)图 8-49题8-3图解各电路的输出波形题8-3 解图所示。
( a)( b)( c)( d)题 8-3 解图8-4化简以下逻辑函数(方法不限)1) F AB A C C D D2) F A(C D CD) B CD A CD ACD3) F( A B)D(A B BD) C A CBD D 4) F AB CD A CDE BDE AC D EF A B A C C D D解 1)A B A C C D(屡次利用吸取率)A B A C DB AC DF A (CD CD) B CD A CD A CDA CD A CD BCD ACD A CD2)(合并同类项)CD CD BCDCD CDF A (CD CD) B CD A CD A CD或CD CD BCD A CD CDCDF(A B )D(A B BD) C A CBD D3)A B D A B C BD C A CBD DAB D A B C BD C A CBD再利用卡诺图,如题8-4 解图( a)所示。
高中物理8.逻辑电路和控制电路优秀课件
三、开关“非〞电路
1.“非〞逻辑关系:输出状态和输入状态 相反的逻辑关系叫做“非〞逻辑关 系. 2.“非〞电路:具有 “非〞关逻系辑的电路叫做“非〞电路.
即学即用 1.判断以下说法的正误. (1)“与〞电路中,A、B两个输入端中只要有其中一个为“1〞,输出端就为“1 〞.( ) × (2)“与〞电路中,A、B两个输入端都为“1〞时,输出端才是“1〞.( ) √ (3)“或〞电路中,A、B两个输入端有一个是“0〞时,输出端就是“0〞.( ) × (4)“或〞电路中,A、B两个输入端有一个是“1〞时,输出端就是“1〞.( ) √
第二章 直流电路
8 逻辑电路和控制电路
学科素养与目标要求
物理观念:
初步了解简单的逻辑电路及表示符号.
科学探究:
通过实验理解“与〞、“或〞和“非〞门电路在逻辑电路中的结果与条件的逻辑关
系科.学态度与责任:
初步了解集成电路的开展对社会进步的意义.
内容索引
NEIRONGSUOYIN
自主预习 重点探究 达标检测
表.
1234567
本课结束
(2)在下表中填写对应条件下事件的结果(灯泡P是亮还是熄).
条件
开关A 开关B
断
断
断
通
通
断
通
通
结果 灯泡P
熄 熄 熄 亮
知识深化 1.“与〞电路是指一个事件的几个条件都满足时,事件才能发生,即“与〞 电路的输入端都是“1〞时,输出端才是“1〞. 2.“与〞电路的真值表:
输入
A
B
0
0
0
1
1
0
1
1
输出 P 0 0 0 1
(1)条件A和事件P之间的关系如何? 答案 条件A满足,事件P不发生,二者总是相反关系
继电器接触器控制电路
第八章 继电器-接触器控制电路
8.2.2 继电器-接触器自动控制的 基本线路
集中控制与分散控制
第八章 继电器-接触器控制电路
8.2.2 继电器-接触器自动控制的 基本线路
双速异步电机的基本控制线路
第八章 继电器-接触器控制电路
8.2.2 继电器-接触器自动控制的 基本线路
电磁铁、电磁离合器的基本控制线路
主动摩擦片 绝缘层
铁粉
线圈
主动轴
从动轴
图8.25 多片式电磁离合器的摩擦片 图8.26 电磁粉末离合器
第八章 继电器-接触器控制电路
8.1.4 执行电器
电磁夹具 工件
绝缘材料 工作台
线圈
铁心
图8.27 电磁工作台
第八章 继电器-接触器控制电路
8.2 继电器-接触器控制的常用
基本线路
8.2.1继电器-接触器自动控制线路的构成
8.1.1 非自动控制电器
转换开关
倒顺开关
第八章 继电器-接触器控制电路
8.1.2 自动控制电器
接触器(交流、直流) KM
常闭触头
动
常
铁
开
心
触
头
线 圈
静 铁 心
图8.15 交流接触器的结构
图8.16 直流接触器的原理结构图
第八章 继电器-接触器控制电路
8.1.2 自动控制电器
接触器(交流、直流) KM
第八章 继电器-接触器控制电路
8.2.1继电器-接触器自动控制线路
电原理图绘制规的律构成
1.主电路用粗线表示,并绘 制在左边控制电路用细线绘 制在图的右边(或下边)。
2,控制电路电源分列两边, 按各电器动作先后由上而下 平行绘制。 3,同一电器各部件用同 一字符表示,相同电器 用数字序号表示。
互锁控制电路原理

互锁控制电路原理首先,互锁功能是通过使用几个相关的接点或开关来实现的。
这些接点和开关通过连接或断开电路来控制设备或系统的运行。
当其中一个接点或开关处于特定的状态时,其他接点或开关就不能改变其状态,从而实现了互锁功能。
互锁功能的原理是基于逻辑判断和动作反馈。
其次,逻辑控制是互锁控制电路的核心。
逻辑控制是通过逻辑运算电路来实现的,一般采用与门或或门组成的逻辑门电路。
逻辑控制电路接收输入信号,并按照设定的逻辑运算规则进行计算和判断,然后生成输出信号控制设备或系统的动作。
互锁控制电路通常由以下几个基本元件组成:电源、接触器、继电器、触点、限位开关和按钮开关等。
电源为整个电路提供电能,接触器是电气控制装置,用于打开或关闭电流回路。
继电器是电磁驱动的开关,用于控制较大功率负载。
触点是连接电路的部分,当触发条件满足时,触点会闭合或断开电路。
限位开关通常用于检测机械设备或系统的位置和行程,从而实现互锁保护功能。
按钮开关用于手动控制设备或系统的启停。
在互锁控制电路中,互锁信号的传递和判断是非常重要的。
当一个设备或系统发生故障或异常时,互锁信号会被传递到逻辑控制电路,通过逻辑运算电路的计算和判断,确定问题的原因,并采取相应的措施进行处理。
这些互锁信号的传递和判断可以通过接线和逻辑运算电路来实现。
为了保证互锁控制电路的可靠性和稳定性,还需要考虑以下几个因素:选择合适的电气元件和设备,确保其质量和性能符合要求;合理设计电气连接和布线,减少电气干扰和误操作的可能性;安装正确的保护装置,保护电气元件和电路免受过载、短路等故障的损害;定期维护和检修互锁控制电路,保持其正常运行和工作。
总的来说,互锁控制电路是一种重要的电气控制电路,可以实现设备或系统的互锁保护和顺序运行。
它的原理基于互锁功能和逻辑控制,通过逻辑运算电路和互锁信号的传递和判断,实现对设备或系统的控制和保护。
在设计和应用互锁控制电路时,需要考虑电气元件的选择、电路的连接和布线、保护装置的安装以及定期维护和检修等因素,以确保其可靠性和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ctg Acos u2 1.33 Asin u1 2.56
因 此 对 应 的 =26.65° , 由 于 26.65°/1.8°=14.81 , 所 以
k=15。
7-4 在图7-9所示只读存储器256细分电路中,请计算 第A000(十六进制)单元的存储值。
A000( 十 六 进 制 ) 对 应 的 二 进 制 为 1010000000000000 , 即 X=10100000 、 Y=00000000 , 对 应 十 进 制 X=160 、 Y=0 , 由下式
2π arctg Y 128 X 128
(X 128, Y 128)
可得θ=284°,284°×(256/360°)=201.96,取整为202, 对应的二进制为11001010。
因此,A000(十六进制)单元的存储值为11001010,对应 十进制为202。
7-5 在图7-14a所示的鉴相电路中为什么要设置门槛, 门槛电路是如何工作的?
图7-31为一单稳辨向电路,输入信号 A、B为相位差90的方波信号,分析其 辨向原理,并分别就A导前B 90、B导
前A 90的情况,画出A、Uo1、Uo2的波
形。
A
A
B
B
A
A
B
B
A'
A'
Uo1
Uo1
Uo2
Uo2
当A导前B 90时,Uo1有输出,Uo2无输出,当 B导前A 90时,Uo1无输出,Uo2有输出,实现 辨向。
7-3 若测得待细分的正余弦信号某时刻值为u1=2.65V, u2=-1.33V,采用微机对信号进行200细分,请判别其所属
卦限,并求出对应的值和k值。
某时刻正弦信号值为u1=2.65V, 余弦信号值为 u2=-1.33V, 根据两信 号的极性 (u1为+、u2为-)和绝对值大小 (|u1|〉|u2|),可判别出信号在3卦限。 由于对信号进行200细分,因此在一个卦限内,需实现
①在触发之后是双向导通的;
②触发电压不分极性,只要绝对值 达到触发门限值即可使双向晶闸管 导通。
ZL
IL
+E
P1
R5
R1 Ui
VD
VLC V1
4N25
R2
R3
b2
VS
V2
e b1
C
R4
P2
~u
A V3 K
G
图8-4 交流半波导通功率驱动电路
按照电路所控制的负载电源类型分类, 常见的有直流电源负载驱动电路和交流 电源负载驱动电路等类型
(一)晶体管直流负载功率驱动电路
负载所需的电流不太大
+Ec
VD ZL 驱动电路
设计要点:
合理确定Ui、R与V的电流放大系数 值之间的数值关系,充分满足
I b I L / ,可确保V导通时工作于 饱和区,以降低V的导通电阻及减小 功耗。
阳极 A 门极 G
阴极 K 图8-3a 单向晶闸管图形符号
单向晶闸管的工作状况:
一、导通条件 二、关断条件
晶闸管导通条件:
在阳极A与阴极K之间加正向电 压,同时在门极G与阴极K之间 加正向电压(触发),这样阳 极A与阴极K之间即进入导通状 态。晶闸管一旦导通,只要阳 极A与阴极K之间的电流不小于 其维持电流IH,门极G与阴极K 之间是否还存在正向电压,对
第八章 逻辑控制电路
二值可控元件驱动电路 可编程逻辑器件
第一节 二值可控元件驱动电路
一、功率开关驱动电路 二、继电器与电磁阀驱动电路 三、步进电动机驱动电路
一、功率开关驱动电路
分类:
按照电路中所采用的功率器件类型分类, 常见的有晶体管驱动电路、场效应管驱 动电路和晶闸管驱动电路等类型。
按照电路所驱动的负载类型分类,常见 的有电阻性负载驱动电路和电感性负载 驱动电路等类型。
已经导通的晶闸管完全没有影 响。
阳极 A
门极 G 阴极 K
晶闸管关断条件:
主电极阳极A与阴极K之间的电流小 于其维持电流IH,晶闸管即进入关 断状态。
双向晶闸管亦称双向半导体开关元件(TRIAC)
电极 MT2
电极 MT1
门极 G
图8-3b 双向晶闸管图形符号
与单向晶闸管相比较,双向晶闸管 的主要区别是:
鉴相电路若没有设置门槛,会有在平衡点附近 振摆跟踪的问题。鉴相电路设置门槛(见图714a),只是在鉴相电路中加有两个RC延时回 路 只 于 达 高 1延4c开U有时起电)j的门D信门平,G上电号槛的1只有升平,的相有可。前也作位D能若,G可用差2输U有U起。信jd出与可已门在号低U能经槛Ud,电的输上j作超当平相出跳用前U、位低,。时j 滞U差电就调(j后很平的不节见U小,上会电图dU,升发时阻d7在是生要-(R1U4UU和滞图bjdx)后到 为电的7-, 容C可改变门槛的大小。
(二)场效应晶体管直流负载功率驱动电路
用于功率驱动电路的场效应晶体管称为 功率场效应晶体管。功率场效应晶体管 是电压控制器件,具有很高的输入阻抗, 所需的驱动功率很小,对驱动电路要求 较低。功率场效应晶体管具有较高的开 启阈值电压,有较高的噪声容限和抗干 扰能力。
场效应晶体管大多数为绝缘栅型场效应 管,亦称MOS场效应管。功率场效应 晶体管在制造中多采用V沟槽工艺,简 称为VMOS场效应管。其改进型则称为 TMOS场效应管
漏极 D
+Ec
栅极 G
V DS
源极 S
VD ZL IL
R Ui
V
VS
a)
b)
图8-2 场效应晶体管功率驱动电路 a)VMOS场效应管电极 b)场效应管驱动电路
(三)晶闸管交流负载功率驱动电路
交流负载的功率驱动电路,通常采用晶 闸管来构成。晶闸管有单向晶闸管和双 向晶闸管两种类型。
单向晶闸管亦称单向可控硅(SCR)
控制电路
开环控制 闭环控制
(一) 开环控制
测量电路
传感器 扰动量
给定 机构
设定 电路
放大 电路
变换 电路
控制电路
执行 机构
被控 输出 对象
图1-8 开环控制系统的基本组成
精度不高:
一、对扰动的测量误差影响控制精度。 二、扰动模型的不精确性影响控制精度。
加校正电路
主要考虑从发现输出量发生变化到执行控制需 要一段时间,为了提高响应速度常引入微分环 节。 另外,当输出量在扰动影响下作周期变化时, 由于控制作用的滞后,可能产生振荡。为了防 止振荡,需要引入适当的积分环节。在实际电 路中,往往比较电路的输出先经放大再送入校 正电路,视需要可能再次放大