状态空间模型计算和例子
python马尔可夫链的转移概率计算

马尔可夫链是一种基于概率转移的模型,可以通过计算每个状态转移到每个其他状态的转移概率来理解和模拟状态转换的过程。
在Python中,可以使用许多库来处理马尔可夫链,例如`numpy`和`scipy`。
以下是一个简单的例子,展示如何使用Python和`numpy`库来计算马尔可夫链的转移概率。
```pythonimport numpy as np# 定义状态空间states = ['state1', 'state2', 'state3']# 定义转移矩阵# 假设从状态1转移到状态1的概率是0.8, 从状态1转移到状态2的概率是0.1, 从状态1转移到状态3的概率是0.1# 从状态2转移到状态1的概率是0.4, 从状态2转移到状态2的概率是0.3, 从状态2转移到状态3的概率是0.3# 从状态3转移到状态1的概率是0.4, 从状态3转移到状态2的概率是0.6transition_matrix = np.array([[0.8, 0.1, 0.1],[0.4, 0.3, 0.3],[0.4, 0.6, 0]])# 计算转移概率# 使用numpy的linalg.inv函数来计算逆矩阵,然后乘以转移矩阵,得到转移概率forward_probabilities = np.linalg.inv(transition_matrix).dot(np.eye(len(states)))print(forward_probabilities)```这段代码首先定义了状态空间和转移矩阵。
然后,它使用numpy的linalg.inv函数来计算转移矩阵的逆矩阵,并使用这个逆矩阵乘以转移矩阵,得到每个状态的转移概率。
最后,它打印出这些转移概率。
请注意,对于大型的马尔可夫链,直接计算逆矩阵可能会非常耗时,甚至可能导致内存溢出。
在这种情况下,可能需要使用更复杂的方法来求解转移概率,例如使用动态规划或蒙特卡洛方法。
车辆二自由度模型状态空间方程

车辆二自由度模型状态空间方程一、车辆二自由度模型状态空间方程车辆二自由度模型是车辆动力学中常用的简化模型之一,它将车辆简化为一个在平面上运动的质点。
在这个模型中,车辆可以做平面上的平移和转动运动,因此被称为车辆的二自由度模型。
而状态空间方程则是描述这一模型运动规律的数学工具。
在车辆二自由度模型中,通常采用平移运动的位置和速度以及转动运动的姿态角和角速度作为描述车辆状态的变量。
通过对车辆动力学和控制理论的研究,可以得到描述车辆二自由度模型的状态空间方程。
这些方程包括车辆的位置、速度、姿态角和角速度之间的动态关系,可以用来描述车辆在不同行驶状态下的运动规律。
二、深度分析车辆二自由度模型状态空间方程车辆二自由度模型状态空间方程的深度分析需要从车辆动力学和控制理论的角度进行。
我们需要深入了解车辆的平移和转动运动规律,包括车辆在不同速度和转角条件下的运动特性,以及外部环境对车辆运动的影响。
我们需要探讨车辆控制系统对车辆状态的影响,包括如何通过控制输入来影响车辆的运动状态。
我们需要分析车辆二自由度模型状态空间方程的数学推导和物理意义,以深入理解车辆状态空间方程的结构和参数含义。
在具体的分析过程中,我们可以通过建立车辆运动的动力学模型和控制模型,使用数学工具进行模型分析和仿真验证,从而深入理解车辆二自由度模型状态空间方程的动态性质和稳定性。
三、撰写高质量车辆二自由度模型状态空间方程文章基于以上的深度分析,我们可以着手撰写一篇高质量的文章。
我们可以介绍车辆二自由度模型的基本原理和概念,然后逐步展开对车辆状态空间方程的分析和推导,包括车辆运动学和动力学的描述,以及状态空间方程的数学结构和物理意义。
在文章中,我们可以多次提及车辆二自由度模型状态空间方程的关键词,以加强文章的专业性和知识性。
我们还可以结合个人的观点和理解,对车辆二自由度模型状态空间方程进行综合性的总结和回顾,为读者提供全面、深刻和灵活的理解。
一篇关于车辆二自由度模型状态空间方程的高质量文章需要具备深度和广度兼具的分析能力,结合个人观点和实践经验,以及对读者的引导和启发。
状态和状态空间表达式

补偿器解耦(7/7)
基于所求解的补偿器Gc(s),可实现如图4-3示的解耦控制系统。 例4-8求得的解耦补偿器Gc(s)的传递函数阵的某个元素 出现分子多项式阶次高于分母多项式阶次,这会带来该解 耦控制器工程上物理实现的困难,一般工程上只能做到近 似实现。
状态反馈解耦(1/16)
4.4.2 状态反馈解耦
状态反馈解耦(14/16)
由于E是非奇异阵,所以系统可以解耦。 因此,状态反馈解耦矩阵为
0 0 1 K E F 1 2 3 1 0 1 H E 0 1
1
状态反馈解耦(15/16)
此时闭环系统状态方程和输出方程为:
0 x (t ) 0 0 1 y (t ) 0
为实现系统解耦,要求为W(s)对角线矩阵,因此, I-W(s)也为 对角线矩阵。 故,得出Gp(s)Gc(s)也需为对角线矩阵。 即为实现如图6-3所示结构的系统的解耦,应取合适补偿 器Gc(s)使Gp(s)Gc(s)是非奇异对角线矩阵。
补偿器解耦(4/7)—例6-8
例4-8 已知系统如图4-4所示,
1 s l2 1
状态反馈解耦(9/16)
可以看出W(s)是对角线矩阵,所以其闭环系统是一个完全解 耦系统。 另外,传递函数对角元素均是积分环节,故称这样的系统 为具有积分型的解耦系统。 下面通过例子来说明如何借助状态反馈实现解耦。
状态反馈解耦(10/14)
例4-9 设系统的状态空间模型为:
s 2 3s 1 s ( s 1)( s 2) 1 G ( s) C ( sI A) B 1 ( s 1)( s 2)
因此,系统存在耦合现象。 系统的状态图如图4-6所示。
马尔可夫链的定义及例子
3、转移概率
定义 i, j S, 称 P Xn1 j Xn i
的一步转移概率。
pij n 为n时刻
若i, j S, pij n pij ,即pij与n无关,称转移概率
具有平稳性.此时称{Xn,n≥0}为齐次(或时齐的)马尔 可夫链。记P=(pij),称P为{Xn,n≥0}的一步转移概率矩阵.
0
j!
j 0,1, i
pi0公式略有不同,它是服务台由有i个顾客转为空闲的
概率,即第n个顾客来到时刻到第n+1个顾客来到时刻之
间系统服务完的顾客数≥i+1。
pi0 P X n1 0 X n i P(Yn i 1) P(Yn k) k i1
et (t)k dG t ,
0 P{Yn
j Tn1 x}dG x
( x) j exdG x, j 0,1, 2,
0 j!
因此, {Xn,n≥1}是马尔可夫链。其转移概率为
P0 j P( X n1 j X n 0) P(Yn j X n 0)
P(Yn
P( X n1 in1 X n in )
所以{Xn,n≥0}是马尔可夫链,且
pij P( X n1 j X n i) P( f i,Yn1 j) P( f i,Y1 j)
二、切普曼-柯尔莫哥洛夫方程
1,随机矩阵 定义:称矩阵A=(aij)S×S为随机矩阵,若aij ≥0,且
一步转移概率矩阵
0.5009
0.0458 0.2559 0.1388 0.2134
0.0466 0.0988 0.36584 0.14264
状态空间模型计算和例子
状态空间模型计算和例子x(t+1)=Ax(t)+Bu(t)y(t)=Cx(t)+Du(t)其中,x(t)是n维的状态向量,表示系统在时刻t的状态;u(t)是m维的输入向量,表示系统在时刻t的输入;y(t)是p维的输出向量,表示系统在时刻t的输出;A是n×n的矩阵,描述状态向量x(t)的转移规律;B是n×m的矩阵,描述输入向量u(t)对状态向量x(t)的影响;C是p×n的矩阵,描述状态向量x(t)对输出向量y(t)的影响;D是p×m的矩阵,描述输入向量u(t)对输出向量y(t)的影响。
下面以一个简单的例子来说明状态空间模型的应用。
假设我们有一个竖直方向上的弹簧振子系统,其中弹簧的运动受到外界施加的力的影响。
我们希望通过状态空间模型来描述和控制弹簧振子系统的运动。
首先,我们需要定义系统的状态变量。
在这个例子中,我们可以选择弹簧的位置和速度作为系统的状态变量。
设弹簧位置为x(t),速度为v(t),则系统的状态向量可以表示为:x(t)=[x(t);v(t)]接下来,我们需要建立状态向量的转移方程。
弹簧振子系统的运动由弹簧的力和外界施加的力共同决定。
设弹簧的劲度系数为k,质量为m,外界施加的力为f(t),则弹簧振子系统的转移方程可以表示为:x(t+1)=Ax(t)+Bf(t)其中,A是2×2的矩阵,描述位置和速度的转移规律;B是2×1的矩阵,描述外界施加的力对位置和速度的影响。
最后,我们需要定义系统的输出方程。
在这个例子中,我们可以选择弹簧的位置作为系统的输出变量。
则输出方程可以表示为:y(t)=Cx(t)其中,C是1×2的矩阵,描述位置对输出的影响。
通过建立状态空间模型,我们可以分析和预测弹簧振子系统的运动。
例如,我们可以通过模型计算系统在给定初始状态和外界施加力的情况下,弹簧的位置随时间的变化。
同时,我们还可以设计控制算法,通过调节外界施加的力,控制弹簧振子系统的运动。
状态空间方程表示二次方程
状态空间方程表示二次方程全文共四篇示例,供读者参考第一篇示例:二次方程是一种常见的数学方程,具有形式为ax^2 + bx + c = 0的特点。
我们可以通过多种方法来解决二次方程,其中一种方法就是使用状态空间方程来表示它。
状态空间方程是一种描述动态系统的数学模型,通过它我们可以描述系统在不同状态下的行为和演变。
在处理二次方程时,我们可以将其转化为状态空间方程的形式。
假设我们有一个简单的二次方程y = ax^2 + bx + c,我们可以定义状态变量x和y。
然后,我们可以将这个二次方程表示为状态空间方程的形式:x' = x + 0*yy' = -a*x^2 - b*x - cx'和y'分别代表状态变量x和y的变化率。
通过这样的表示,我们可以更清晰地理解二次方程在不同状态下的演变过程。
值得注意的是,状态空间方程对于二次方程的表示并非唯一的。
我们可以根据系统的特点和需求来选择不同的状态变量和方程形式,以便更好地理解和分析二次方程。
通过状态空间方程的表示,我们可以更深入地了解二次方程的性质和行为规律,为进一步的数学研究和应用提供更多的可能性。
第二篇示例:状态空间方程是描述系统动态行为的一种数学工具,它将系统的输入、输出和状态之间的关系以矩阵形式表示,通常用于控制系统的分析与设计。
在控制理论中,线性动态系统通常可以用状态空间方程表示,其中最典型的就是二次方程系统。
本文将介绍二次方程系统的状态空间方程表示,并探讨其性质及应用。
二次方程是一种具有最高次为二次的多项式方程,通常表示为:\[ a x^2 + b x + c = 0 \]其中\(a\), \(b\), \(c\)是系数,\(x\)是变量。
这类方程在数学和物理中有着广泛的应用,比如在力学中描述自由落体运动、在电路分析中描述振动系统等等。
二次方程系统可以用状态空间方程表示为:其中\(x\)是状态向量,\(\dot{x}\)是状态向量的导数,\(u\)是输入向量,\(y\)是输出向量,\(A\), \(B\), \(C\), \(D\)分别是状态空间方程的系数矩阵。
2-控制系统状态变量法建模21
态。
➢ 随着时间的推移,状态不断地变化,tt0各瞬时的状态在状 态空间构成一条轨迹,它称为状态轨线。
➢ 状态轨线如图2-2所示。
系统的状态空间模型(1/11)
2.1.2 系统的状态空间模型
状态空间模型是应用状态空间分析法对动态系统所建立的一 种数学模型,它是应用现代控制理论对系统进行分析和综合的 基础。 ➢ 状态空间模型由 ✓ 描述系统的动态特性行为的状态方程和 ✓ 描述系统输出变量与状态变量间的变换关系的输出 方程 所组成。 ➢ 下面以一个由电容、电感等储能元件组成的二阶RLC电 网络系统为例,说明状态空间模型的建立和形式,然后再进 行一般的讨论。
定义2-1 动态系统的状态,是指能够完全描述系统时间域动态 行为的一个最小变量组。 ➢ 该变量组的每个变量称为状态变量。 ➢ 该最小变量组中状态变量的个数称为系统的阶数。
系统的状态和状态变量(2/5)
“状态”定义的三要素
➢ 完全描述。即给定描述状态的变量组在初始时刻(t=t0)的 值和初始时刻后(tt0)的输入,则系统在任何瞬时(tt0)的行 为,即系统的状态,就可完全且唯一的确定。
系统的状态空间(1/1)
2. 系统的状态空间
x2 x(t0)
x(t1)
若以n个状态变量x1(t),x2(t),…,xn(t)
为坐标轴,就可构成一个n维欧氏空
x(t2)
间,并称为n维状态空间,记为Rn.
x(t)
状态向量的端点在状态空间中的位 置,代表系统在某一时刻的运动状
x1 图2-2 二维空间的状态轨线
概述(12/12)
状态和状态空间模型(1/2)
2.1 状态和状态空间模型
系统的状态空间模型是建立在状态和状态空间概念的基础上 的,因此,对这些基本概念进行严格的定义和相应的讨论,必须 准确掌握和深入理解。 ➢ 状态 ➢ 状态变量 ➢ 状态空间 ➢ 状态空间模型
现代控制理论课后答案(俞立)第五章
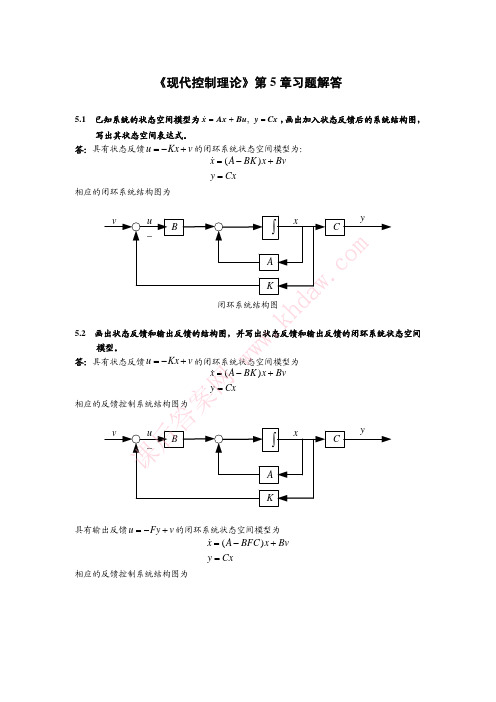
《现代控制理论》第5章习题解答5.1 已知系统的状态空间模型为Cx y Bu Ax x =+=, ,画出加入状态反馈后的系统结构图,写出其状态空间表达式。
答:具有状态反馈的闭环系统状态空间模型为:u Kx =−+v ()xA BK x Bv y Cx=−+=相应的闭环系统结构图为闭环系统结构图5.2画出状态反馈和输出反馈的结构图,并写出状态反馈和输出反馈的闭环系统状态空间模型。
答:具有状态反馈的闭环系统状态空间模型为u Kx =−+v ()xA BK x Bv y Cx=−+=相应的反馈控制系统结构图为具有输出反馈的闭环系统状态空间模型为u Fy =−+v ()x A BFC x Bv y Cx=−+=相应的反馈控制系统结构图为后案网 ww w.kh d5.3 状态反馈对系统的能控性和能观性有什么影响?输出反馈对系统能控性和能观性的影响如何?答:状态反馈不改变系统的能控性,但不一定能保持系统的能观性。
输出反馈不改变系统的能控性和能观性。
5.4 通过检验能控性矩阵是否满秩的方法证明定理5.1.1。
答:加入状态反馈后得到闭环系统K S ,其状态空间模型为()x A BK x Bv y Cx=−+=开环系统的能控性矩阵为0S 1[,][]n c A B BAB A B −Γ="闭环系统K S 的能控性矩阵为 1[(),][()()]n cK A BK B B A BK B A BK B −Γ−=−−"由于222()()()()(A BK B AB BKBA BKB A ABK BKA BKBK B)A B AB KB B KAB KBKB −=−−=−−+=−−−#以此类推,总可以写成的线性组合。
因此,存在一个适当非奇异的矩阵U ,使得()m A BK B −1,,,m m A B A B AB B −[(),][,]cK c A BK B A B U Γ−=Γ由此可得:若rank([,])c A B n Γ=,即有个线性无关的列向量,则n [(),]cK A BK B Γ−也有个线性无关的列向量,故n rank([(),])cK A BK B n Γ−=5.5 状态反馈和输出反馈各有什么优缺点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1965
1970
1975
1980
Series 2
0
5
10
1955
1960
1965
1970
1975
1980
#library(dse) my2=TSdata(output=newdat[,3,drop = F]) my2=tframed(my2, list(start=c(1953,1), frequency=4))
library(dse) my=TSdata(input= newdat[,3,drop = F],output=newdat[, 2,drop = F]) my=tframed(my, list(start=c(1953,1), frequency=4)) seriesNamesInput(my)="CPI" seriesNamesOutput(my)="BILLS"
seriesNamesInput(my)="CPI" seriesNamesOutput(my)="BILLS“ bb=estBlackBox(my,g=3) #lag=?!!! tfplot(bb) bb$model #Giving F, G, H, K bb$estimates #giving $cov, $like, $pred attributes(bb)#model #看结果
Step 4: Kalman Filter Filtering, Smoothing, and Forecasting
• FKF: using R function fkf • Shumway using functions Kfilter0, Ksmooth0, Kfilter1, Ksmooth1, Kfilter2, Ksmooth2 • dlm: using function dlmFilter, dlmSmooth, dlmFilterdlmForecast • dse: using functions such as forecast, featherForecasts, horizonForecasts, etc Note: you have to pay attention to the meanings of the output!
Step 2: Log Likelihood Function
• FKF: write function such as objective to create log likelihood function • Shumway: write function via Kfilter0, Kfilter1, Kfilter2 to create log likelihood function • dlm: write function such as buildFun
状态空间模型及例子
吴喜之
Models and Computation Steps for State-Space Model
Sources (for four packages): Package: FKF, related article (not for R, but having formulas): /p/dgr/kubcen/1998141.html (file3826.pdf) Package: dlm dlm.pdf (in R project or your R directory) Package: Shumway: /stoffer/tsa2/chap6.htm Package: dse In your R directory : dse-guide.pdf and article: http://www.bank-banque-canada.ca/pgilbert/gil93.pdf
ans <- fkf(a0 = c(0, 0), P0 = diag(c(10, 10)), dt = rbind(0, 0), ct = matrix(0), Tt = matrix(c(ar1, 1, ar2, 0), ncol = 2), Zt = cbind(1, 0), HHt = matrix(c(sigma^2, 0, 0, 0), ncol = 2), GGt = matrix(0), yt = rbind(a))
#library(dse) my1=TSdata(output=newdat[,c(3,2),drop = F]) my1=tframed(my1, list(start=c(1953,1), frequency=4)) bb1=estBlackBox(my1,g=3) tfplot(bb1) attributes(bb1)#model
Series 1
One step ahead predictions (dotted) and actual data (solid)
12
bb1$model #Giving F, H, K bb1$estimates #giving $cov, $like, $pred #看结果
0
4
8
1955
1960
Filtering, Smoothing, Forecast
• s<t: forecasting or prediction • s=t: filtering • s>t: smoothing
Kalman Filter (Forecast ): with
Prediction equations
with
0 2
4
6
bb2$model #Giving F, H, K (one dimention) bb2$estimates #giving $cov, $like, $pred
8
10
12
14
1955
1960
1965
1970
1975
1980
bb4=estVARXls(my1,g=3)#two variables (TWO output) bb4$model #Giving A(L), B(L), C(L) bb4$estimates #giving $cov, $like, $pred
Model (Shumway notation)
Transition equation and observation equation
• • • • • • •
xt : p×1 state vector N(m, S) yt : q×1 observation/measurement vector wt : p×1 system noise iid N(0,Q) vt : q×1 observation noise iid N(0,R) ut : r×1 fixed input At : q×p observation/measurement matrix F : p×p ; G : q×r, U: p×r, Q: p×p, R: q×q
updating equations where
The MSE of
is Kalman gain
Kalman Smoother: with initial
The Lag-one Covariance Smoother
With initial condition
for t=n,n-1,…,2
Three “levels” of Shumway’s models
One step ahead predictions (dotted) and actual data (solid)
bb2=estBlackBox(my2,g=3) tfplot(bb2) attributes(bb2)#model
Series 1
bb3=estVARXls(my,g=1)#two variables (one input one output) bb3$model #Giving A(L), B(L), C(L) bb3$estimates #giving $cov, $like, $pred
– dlmModARMA , dlmModPoly, dlmModReg , dlmModSeas , dlmModTrig
• dse: using functions such as ARMA, SS (can transfer to each other) to build an empty model (but)
Example: FKF
Example: FKF
#Shumway Example 6.12 newdat = read.table("f:/xzwu/2009/berkeley/ts/shumway/mydata/Newbold1.txt", comment.char="#") y = newdat[1:50,2] # quarterly inflation (column 2) z = newdat[1:50,3] # quarterly interest rates (column 3) plot(ts(y,start=c(1953,1),frequency=1)) points(ts(y,start=c(1953,1),frequency=1),type='p',pch=15) lines(ts(z,start=c(1953,1),frequency=1),lty=2) points(ts(z,start=c(1953,1),frequency=1),type='p',pch=18)
One step ahead predictions (dotted) and actual data (solid) bb=estBlackBox(my,g=3) #lag=?!!! tfplot(bb)
15 Series 1 0 5 10