走迷宫程序(含自动迷宫生成)
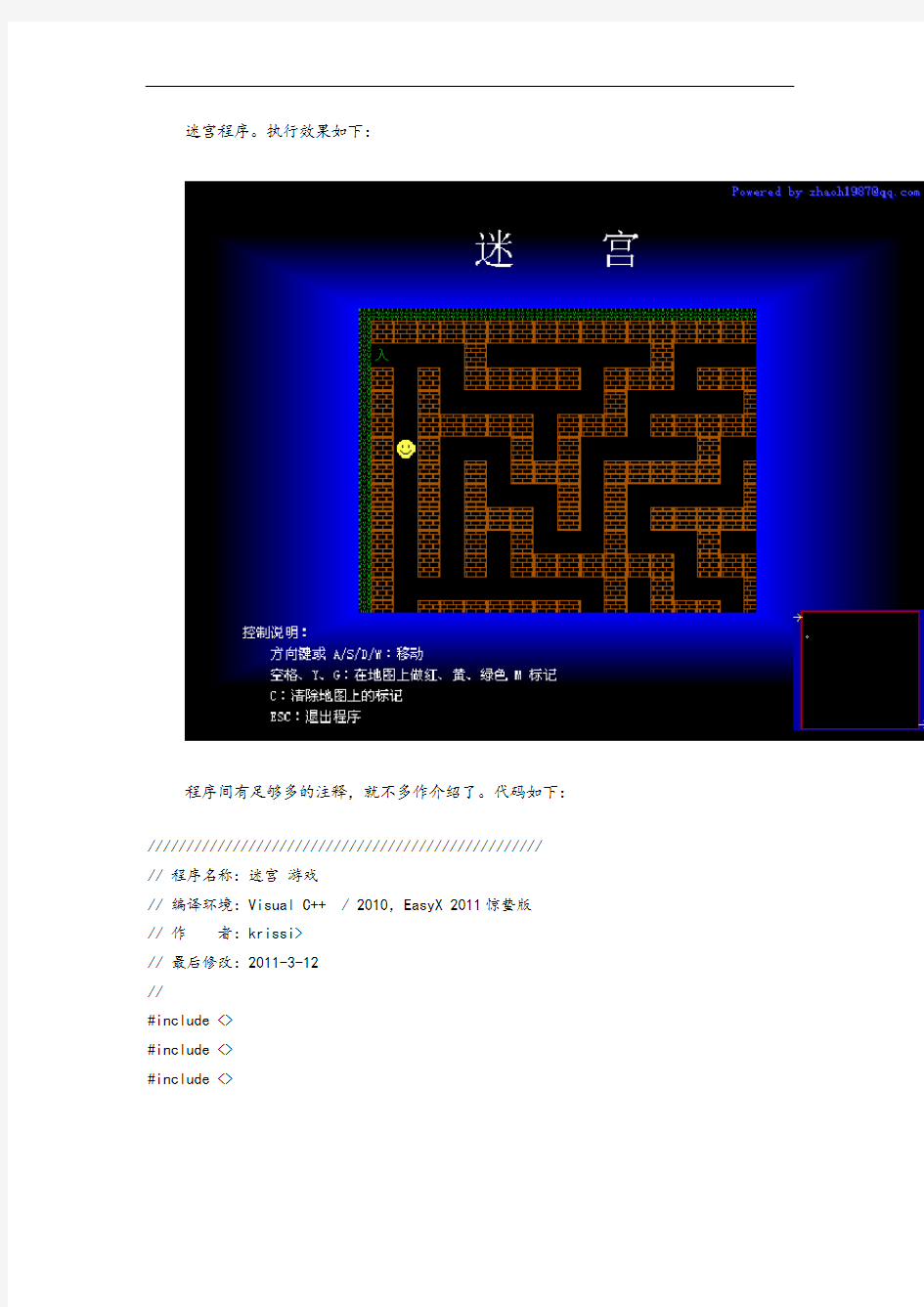
迷宫程序。执行效果如下:
程序间有足够多的注释,就不多作介绍了。代码如下:
///////////////////////////////////////////////////
// 程序名称:迷宫游戏
// 编译环境:Visual C++ / 2010,EasyX 2011惊蛰版
// 作者:krissi>
// 最后修改:2011-3-12
//
#include <>
#include <>
#include <>
//////////////////////////////////////////////////////
// 定义全局变量
//
BYTE** g_imgMap = NULL; // 迷宫地图
SIZE g_szMap; // 迷宫地图的尺寸
IMAGE g_imgSight(360, 280); // 游戏的视野
RECT g_rtSight; // 游戏的视野的范
围
IMAGE g_imgItem(180, 20); // 地图元素
IMAGE g_imgGPS; // 迷你地图,用于显示游戏者在地图中的位置
POINT g_ptGPS; // 迷你地图的显示位置
SIZE g_szGPS; // 迷你地图的尺寸
POINT g_ptPlayer; // 游戏者的位置
// 枚举地图元素,兼做元素位置的 x 坐标
enum MAPITEM { MAP_WALL = 0, MAP_PLAYER = 20, MAP_GROUND = 40, MAP_MARKRED = 60, MAP_MARKGREEN = 80, MAP_MARKYELLOW = 100, MAP_ENTRANCE = 120, MAP_EXIT = 140, MAP_OUTSIDE = 160 };
// 枚举用户的控制命令
enum CMD { CMD_QUIT = 1, CMD_UP = 2, CMD_DOWN = 4, CMD_LEFT = 8, CMD_RIGHT = 16, CMD_MARKRED = 32, CMD_MARKGREEN = 64, CMD_MARKYELLOW = 128, CMD_CLEARMARK = 256 };
//////////////////////////////////////////////////////
// 函数声明
//
void Welcome();
// 绘制游戏界面
void InitImage(); // 初始化游戏图片
void InitGame();
// 初始化游戏数据
void GetMazeSize(); // 提示用户输入迷宫大小
void MakeMaze(int width, int height); // 生成迷宫:初始化(注:宽高必须是奇数)
void TravelMaze(int x, int y); // 生成迷宫:遍历 (x, y) 四周MAPITEM GetMazeItem(int x, int y); // 获取指定坐标的迷宫元素void Paint(); // 绘制视野范围内的迷宫
int GetCmd(int* c);
// 获取用户输入的命令
void DispatchCmd(int cmd); // 处理用户输入的命令
void OnUp();
// 向上移动
void OnLeft(); // 向左移动
void OnRight();
// 向右移动
void OnDown(); // 向下移动
void OnMark(MAPITEM value); // 在地图中做标记bool CheckWin();
// 检查是否到出口
bool Quit();
// 询问用户是否退出游戏
//////////////////////////////////////////////////////
// 函数定义
//
// 主程序
void main()
{
// 初始化
initgraph(640, 480); // 创建绘图窗口
srand((unsigned)time(NULL)); // 设置随机种子
// 显示主界面
Welcome();
// 初始化
InitImage();
InitGame();
// 游戏过程
int c;
while( !((GetCmd(&c) == CMD_QUIT) && Quit()) )
{
DispatchCmd(c);
Paint();
if (CheckWin())
break;
// 延时
Sleep(100);
}
// 清理迷宫地图占用的内存
for(int x = 0; x < + 2; x++)
delete[] g_imgMap[x];
delete [] g_imgMap;
// 关闭图形模式
closegraph();
}
// 绘制游戏界面
void Welcome()
{
// 绘制渐变色外框
for(int i=0; i<128; i++)
{
setcolor(RGB(0, 0, (127 - i) << 1));
rectangle(149 - i, 109 - (i >> 1), 490 + i, 370 + (i >> 1));
}
// 设置字体样式
setcolor(WHITE);
setbkmode(TRANSPARENT);
// 绘制标题
setfont(36, 0, _T("宋体"));
outtextxy(248, 40, _T("迷宫"));
// 绘制操作说明
setfont(12, 0, _T("宋体"));
outtextxy(50, 382, _T("控制说明:"));
outtextxy(74, 400, _T("方向键或 A/S/D/W:移动"));
outtextxy(74, 418, _T("空格、Y、G:在地图上做红、黄、绿色 M 标记"));
outtextxy(74, 436, _T("C:清除地图上的标记"));
outtextxy(74, 454, _T("ESC:退出程序"));
}
// 初始化游戏图片
void InitImage()
{
// 预绘制游戏图片到 IMAGE 缓存(可以修改为加载图片以获得更好效果)
SetWorkingImage(&g_imgItem);
cleardevice();
// 绘制 PLAYER
setorigin(MAP_PLAYER, 0);
setfillstyle(YELLOW);
setcolor(YELLOW);
fillellipse(2, 2, 17, 17);
setcolor(BLACK);
line(7, 7, 7, 8);
line(12, 7, 12, 8);
arc(5, 6, 14, 14, , ;
// 绘制墙壁
setorigin(MAP_WALL, 0);
setfillstyle(BROWN, PATTERN_FILL, "\x20\x20\x20\xff\x04\x04\x04\xff");
setcolor(BROWN);
bar(1, 1, 18, 18);
rectangle(0, 0, 19, 19);
// 绘制红色标记
setorigin(MAP_MARKRED, 0);
setcolor(RED);
moveto(5, 15);
linerel(0, -10); linerel(5, 5); linerel(5, -5); linerel(0, 10);
// 绘制绿色标记
setorigin(MAP_MARKGREEN, 0);
setcolor(GREEN);
moveto(5, 15);
linerel(0, -10); linerel(5, 5); linerel(5, -5); linerel(0, 10);
// 绘制黄色标记
setorigin(MAP_MARKYELLOW, 0);
setcolor(YELLOW);
moveto(5, 15);
linerel(0, -10); linerel(5, 5); linerel(5, -5); linerel(0, 10);
// 绘制入口
setorigin(MAP_ENTRANCE, 0);
setcolor(GREEN);
setfont(12, 0, _T("宋体"));
outtextxy(4, 4, _T("入"));
// 绘制出口
setorigin(MAP_EXIT, 0);
outtextxy(4, 4, _T("出"));
// 绘制迷宫外面的空地
setorigin(MAP_OUTSIDE, 0);
setfillstyle(GREEN, PATTERN_FILL, "\x50\x55\x22\x20\x05\x55\x22\x02");
bar(0, 0, 19, 19);
// 恢复坐标系
setorigin(0, 0);
// 显示作者
SetWorkingImage();
setcolor(BLUE);
TCHAR author[] = _T("Powered by");
outtextxy(471, 4, author);
setcolor(LIGHTBLUE);
outtextxy(470, 3, author);
}
// 初始化游戏数据
void InitGame()
{
// 提示用户输入迷宫大小
GetMazeSize();
// 初始化参数
if (g_imgMap != NULL)
{ // 清理迷宫地图占用的内存
for(int x = 0; x < + 2; x++)
delete[] g_imgMap[x];
delete [] g_imgMap;
}
MakeMaze, ; // 创建迷宫
= 2; // 设置游戏者的位置
= 2;
= 0; // 设置视野范围
= 0;
= 17;
= 13;
// 设置 GPS 显示区
setfillstyle(BLUE);
bar(522, 368, 637, 471);
if > { = 100; = (int) * / + ; }
else {
= 100; = (int) * / + ; }
Resize(&g_imgGPS, , ;
= 530 + 50 - / 2;
= 370 + 50 - / 2;
// 画迷你地图外框
setcolor(RED);
rectangle - 1, - 1, + , + ;
// 画迷你地图入口和出口
setcolor(YELLOW);
moveto - 8, + / ;
linerel(7, 0); linerel(-3, -3); moverel(3, 3); linerel(-3, 3);
moveto + , + - / ;
linerel(7, 0); linerel(-3, -3); moverel(3, 3); linerel(-3, 3);
// 绘制游戏区
Paint();
}
// 提示用户输入迷宫大小
void GetMazeSize()
{
= = 0;
// 获取用户输入的宽高
TCHAR s[4];
while < 20 || > 200)
{
InputBox(s, 4, _T("请输入迷宫的宽度\n范围:20~200"), _T("输入"), _T("25"));
= _ttoi(s);
}
while < 20 || > 200)
{
InputBox(s, 4, _T("请输入迷宫的高度\n范围:20~200"), _T("输入"), _T("25"));
= _ttoi(s);
}
// 确保宽高为奇数
if % 2 != 1) ++;
if % 2 != 1) ++;
}
// 生成迷宫:初始化(注:宽高必须是奇数)
void MakeMaze(int width, int height)
{
if (width % 2 != 1 || height % 2 != 1)
return;
int x, y;
// 定义迷宫尺寸,并分配迷宫内存
g_imgMap = new BYTE*[width + 2];
for(x = 0; x < width + 2; x++)
{
g_imgMap[x] = new BYTE[height + 2];
memset(g_imgMap[x], MAP_WALL, height + 2);
}
// 定义边界
for (x = 0; x <= width + 1; x++)
g_imgMap[x][0] = g_imgMap[x][height + 1] = MAP_GROUND;
for (y = 1; y <= height; y++)
g_imgMap[0][y] = g_imgMap[width + 1][y] = MAP_GROUND;
// 定义入口和出口
g_imgMap[1][2] = MAP_ENTRANCE;
g_imgMap[width][height - 1] = MAP_EXIT;
// 从任意点开始遍历生成迷宫
TravelMaze(((rand() % (width - 1)) & 0xfffe) + 2, ((rand() % (height - 1)) & 0xfffe) + 2);
// 将边界标记为迷宫外
for (x = 0; x <= width + 1; x++)
g_imgMap[x][0] = g_imgMap[x][height + 1] = MAP_OUTSIDE;
for (y = 1; y <= height; y++)
g_imgMap[0][y] = g_imgMap[width + 1][y] = MAP_OUTSIDE;
}
// 生成迷宫:遍历 (x, y) 四周
void TravelMaze(int x, int y)
{
// 定义遍历方向
int d[4][2] = {0, 1, 1, 0, 0, -1, -1, 0};
// 将遍历方向乱序
int n, t, i;
for(i = 0; i < 4; i++)
{
n = rand() % 4;
t = d[i][0], d[i][0] = d[n][0], d[n][0] = t;
t = d[i][1], d[i][1] = d[n][1], d[n][1] = t;
}
// 尝试周围四个方向
g_imgMap[x][y] = MAP_GROUND;
for(i = 0; i < 4; i++)
if (g_imgMap[x + 2 * d[i][0]][y + 2 * d[i][1]] == 0)
{
g_imgMap[x + d[i][0]][y + d[i][1]] = MAP_GROUND;
TravelMaze(x + d[i][0] * 2, y + d[i][1] * 2);
// 递归
}
}
// 获取指定坐标的迷宫元素
MAPITEM GetMazeItem(int x, int y)
{
return (MAPITEM)g_imgMap[x][y];
}
// 绘制视野范围内的迷宫
void Paint()
{
int x1, y1;
// 绘制视野内的迷宫
SetWorkingImage(&g_imgSight);
for(int x = ; x <= ; x++)
for(int y = ; y <= ; y++)
{
x1 = (x - * 20;
y1 = (y - * 20;
putimage(x1, y1, 20, 20, &g_imgItem, GetMazeItem(x, y), 0);
}
// 绘制游戏者
x1 = - * 20;
y1 = - * 20;
putimage(x1, y1, 20, 20, &g_imgItem, MAP_PLAYER, 0);
// 绘制迷你地图
SetWorkingImage(&g_imgGPS);
cleardevice();
int tx = (int)( - 1) * / (double) - 1) + ;
int ty = (int)( - 1) * / (double) - 1) + ;
setcolor(YELLOW);
circle(tx, ty, 1);
// 更新到绘图窗口
SetWorkingImage();
putimage(150, 110, 340, 260, &g_imgSight, 10, 10);
putimage, , &g_imgGPS);
}
// 获取用户输入的命令
int GetCmd(int *c)
{
*c = 0;
if (GetAsyncKeyState(VK_LEFT) & 0x8000) *c |= CMD_LEFT;
if (GetAsyncKeyState(VK_RIGHT) & 0x8000) *c |= CMD_RIGHT;
if (GetAsyncKeyState(VK_UP) & 0x8000) *c |= CMD_UP;
if (GetAsyncKeyState(VK_DOWN) & 0x8000) *c |= CMD_DOWN;
if (GetAsyncKeyState('A') & 0x8000) *c |= CMD_LEFT;
if (GetAsyncKeyState('D') & 0x8000) *c |= CMD_RIGHT;
if (GetAsyncKeyState('W') & 0x8000) *c |= CMD_UP;
if (GetAsyncKeyState('S') & 0x8000) *c |= CMD_DOWN;
if (GetAsyncKeyState(' ') & 0x8000) *c |= CMD_MARKRED;
if (GetAsyncKeyState('G') & 0x8000) *c |=
CMD_MARKGREEN;
if (GetAsyncKeyState('Y') & 0x8000) *c |=
CMD_MARKYELLOW;
if (GetAsyncKeyState('C') & 0x8000) *c |=
CMD_CLEARMARK;
if (GetAsyncKeyState(VK_ESCAPE) & 0x8000) *c |= CMD_QUIT;
return *c;
}
// 处理用户输入的命令
void DispatchCmd(int cmd)
{
if (cmd & CMD_UP) OnUp();
if (cmd & CMD_DOWN) OnDown();
if (cmd & CMD_LEFT) OnLeft();
if (cmd & CMD_RIGHT) OnRight();
if (cmd & CMD_MARKRED) OnMark(MAP_MARKRED);
if (cmd & CMD_MARKGREEN) OnMark(MAP_MARKGREEN);
if (cmd & CMD_MARKYELLOW) OnMark(MAP_MARKYELLOW);
if (cmd & CMD_CLEARMARK) OnMark(MAP_GROUND);
}
// 向上移动
void OnUp()
{
if > 1 && GetMazeItem, - 1) != MAP_WALL)
{
;
if - < 4 && > 0)
{
;
;
}
}
}
// 向左移动
void OnLeft()
{
if > 1 && GetMazeItem - 1, != MAP_WALL && GetMazeItem - 1, != MAP_ENTRANCE)
{
;
if - < 5 && > 0)
{
;
;
}
}
}
// 向右移动
void OnRight()
{
if < && GetMazeItem + 1, != MAP_WALL)
{
++;
if - < 5 && <=
{
++;
++;
}
}
}
// 向下移动
void OnDown()
{
if < && GetMazeItem, + 1) != MAP_WALL)
{
++;
if - < 4 && <=
{
++;
++;
}
}
}
// 在地图中做标记
void OnMark(MAPITEM value)
{
g_imgMap[][] = value;
}
// 检查是否到出口
bool CheckWin()
{
if == && == - 1)
{
HWND hwnd = GetHWnd();
if (MessageBox(hwnd, _T("恭喜你走出来了!\n您想再来一局吗"), _T("恭喜"), MB_YESNO | MB_ICONQUESTION) == IDYES)
{
InitGame();
return false;
}
else
return true;
}
return false;
}
// 询问用户是否退出游戏
bool Quit()
{
HWND hwnd = GetHWnd();
return (MessageBox(hwnd, _T("您确定要退出游戏吗"), _T("询问"), MB_OKCANCEL | MB_ICONQUESTION) == IDOK);
}
人工智能与机器人教学教材
人工智能与机器人
1 1.机器人定义的三个共有属性是:有类人的功能、根据人的编程能自动的工作、人造的机器或机械电子装置。 2.简述机器人的发展史? 1954年美国人(George C. Devol)乔治·德沃尔制造出世界上第一台可编程的机器人,并在1956年获得美国专利。 1959年德沃尔与美国发明家约瑟夫·英格伯格联手制造出第一台工业机器人。 1960年,Conder公司购买专利并制造了样机。 1961年,Unimation公司(通用机械公司)成立,生产和销售了第一台工业机器“Unimate”,即万能自动之意。 1962年,美国万能自动化(Unimation)公司的第一台机器人Unimate在美国通用汽车公司(GM)投入使用标志着第一代机器人的诞生。 1963年麦卡锡则开始在机器人中加入视觉传感系统。 1965年 MIT推出了世界上第一个带有视觉传感器。 1967年, Unimation公司第一台喷涂用机器人出口到日本川崎重工业公司。 1968年,第一台智能机器人Shakey在斯坦福研究所诞生。 1972年,IBM公司开发出直角坐标机器人。 1973年,Cincinnati Milacron公司推出T3型机器人。 1978年,第一台PUMA机器人在Unimation公司诞生 1998年世界著名玩具厂商丹麦乐高(LEGO)公司推出机器人(Mind-storms)套件,让机器人制造变得跟搭积木一样, 1999年日本索尼公司推出犬型机器人爱宝(AIBO)。 2002年5月2日本田制造的名叫阿西(Asimo)四英尺高的白色机器人摇响开市铃声,摇响了机器智能时代的开始。 2006年6月,微软公司推出基于Windows的开发环境,用于构建面向各种硬件平台的软件---Microsoft Robotics Studio,试图实现机器人统一的标准或平台。
(完整word版)走迷宫游戏程序设计.docx
《C 语言程序设计》 题目走迷宫游戏程序设计 一、内容 本系统主要实现了走迷宫游戏,执行游戏的时候出现迷宫图案,每次各不相同,但是入 口均在左上角,出口在右下角,出入口各有“出”、“入”提示。人物为㊣,“█”表示墙,外围为一圈墙,空白部分为可行走的路,使用“上”、“下”、“左”、“右”键操作㊣,当遭遇“墙”时无法前进,操作“█”上下左右移动,直至走到出口,游戏胜利。当无法走出迷宫 时,按“ Esc”键即可退出游戏。 二、上机环境 操作系统: windows XP 开发工具: vc6.0 三、函数调用关系图
main 函数 creat 函数paint 函数game 函数gotoxy 函数get_key函数gotox 函数 图一:函数调用关系图 四、各函数功能说明 main 函数:主函数; create函数:随机生成迷宫; paint函数:画出迷宫; game函数:开始游戏; gotoxy 函数:在文本窗口设置光标; get_key函数:接受按键; 五、算法描述或流程图
开始 游戏界面 画长 33 宽 31 迷宫玩家继续移动人物 开始游戏 N 玩家移动人物 是否到达 口? 出N Y 是否遇 到墙?游戏成功 Y 结束人物坐标位置不变 图二:算法流程图 六、程序运行效果图
图三:游戏开始效果图
图四:到达终点效果图 七、总结 课程设计是培养学生综合运用所学知识,发现,提出,分析和解决实际问题,锻炼实践 能力的重要环节。大学来说掌握计算机开发技术是十分重要的。在程序设计的过程中,我遇到了不少的问题,请教过学姐或者学长,也请教了老师,最后将程序设计好了。回顾起此次 课程设计,我感慨良多,从拿到题目到完成整个编程,从理论到实践,在整整两个星期的日 子里,我学到了很多很多的东西,同时不仅可以巩固了以前所学过的知识,而且还学到了很多在书本上所没有学到过的知识,我发现 c 语言是一门有趣的课程,对它产生了很大的兴趣。并且我明白了细心真的很重要,有时候就是因为一点点的小错误,而导致程序无法调试,并且需要花较长的时间去寻找错误。细心很重要的。 两个星期前的现在,当听到老师布置给我们的题目时,我们都蒙了,这么难的题目我们怎么会啊,我们只能尽我们自己最大的努力把程序给写出来,虽然知道这一路肯定是异常的 艰苦,但豁出去了。上网查资料、去图书馆查,查相关的函数,经过两三天的努力,我把框 架弄出来了,可是还有计算难题摆在我的面前,真的是个难题,自从把框架弄好了以后就没 有进展了,眼看一个星期快过去了,我那个急啊,可是急也没有用。我坚持,终于工夫不负 有心人,大功告成了。
智能机器人走迷宫比赛规则
智能机器人走迷宫比赛规则 一、任务 制作一个由计算机程序控制的机器人,在一间模拟平面结构的房间里运动,由“H”为起点访问指定房间。 二、标准 1、模拟平面结构的房间和特性 机器人走迷宫比赛的场地平面结构示意图见《规则附件》,最终比赛场地以当天现场提供为准。 示意图中的尺寸供练习和实践时参考,竞赛场地的实际尺寸与示意图给定尺寸基本相同,但允许有1cm范围内制作误差。 模拟房间的墙壁33cm高,材质为木板。墙壁为白色。竞赛场地的地板为黑色的光滑木制表面。地板可以有接口,但接合处平整并是同样的黑色。场地的平整度要求,只要机器人可以处理0.3cm的不连续区域就可以。竞赛场地模拟房间里整体地面是水平的,没有斜坡和楼梯。 房子中,所有的走廊和门口宽都不小于46cm。门口并没有门,在地面上用一条2.5cm宽的白线表示房间入口。 竞赛场地的地板是黑色的。 机器人将从示意图中一个标有“H”的正方形开始,代表起始位臵。实际竞赛场地中代表起始位臵的白色正方形是实心的,并不标记“H”。 代表起始的位臵为30cm×30cm边长的白色正方形,正方形的对角线交点将设在46cm走廊的纵向中心线上。 竞赛场地示意图中在代表起始位臵的正方形左侧的墙壁没有标注缺口。竞赛场地这一部分墙壁可以移开,让参赛者比较方便地设臵机器人。机器人也可以用一些装臵来校正机器人在正方形中的位臵。机器人必须在白色正方形中启动。一旦启动,它可以在比赛场地中向所希望的横向或纵向运动。 2、照明设备 竞赛场地周围将尽量使用冷光源,且光线强度适中、均匀。但最终照明等级在比赛时才能确定。参赛者在比赛的当天有时间了解周围的灯光等级及标定
信息技术《机器人走迷宫》教案
信息技术《机器人走迷宫》教案 中学信息技术《机器人走迷宫》教案 第15课机器人走迷宫 【教学目标】 1.知识与技能 ◆学习红外传感器,完成机器人走迷宫; ◆理解机器人走迷宫的策略; ◆学会编写机器人迷宫程序流程图; ◆掌握子程序及复杂程序的编写。 2.过程与方法 ◆通过视频播放机器人走迷宫,激发学生兴趣; ◆通过教师讲解左右手走,培养学生的编程思维; ◆通过让学生自己动手编程、调试,体会成功的乐趣。 3.情感态度与价值观 ◆通过制作走迷宫的机器人,培养学生的想像力和创造力; ◆培养学生积极探索、敢于实践、大胆创新的精神和意识。 【教法选择】 任务驱动、自主探究、分组协作。 【教学重点】
1.理解机器人走迷宫的策略; 2.学会如何编写机器人走迷宫的流程图。 【教学难点】 1.机器人行走方向的判断; 2.掌握子程序及复杂程序的编写; 3.红外传感器在实际生活中的多元运用。 【教学过程】 一、创设情景,导入新课 教师活动 1.设置情景:欣赏走迷宫的机器人视频; 2.引人课题:引导学生分析机器人走迷宫的原理,观察走迷宫机器人中运用到的知识,引出本堂课的任务。 学生活动 欣赏视频,所学知识的整理和回顾,明确学习目标。 二、展现目标,引入任务 教师活动 实例讲解机器人走迷宫的原理及左、右手走:如果一个人在漆黑的迷宫场地中寻找出口,怎么才能走出迷宫呢?一般地,人会通过手的触摸寻找行走路线,沿迷宫的围墙的某一侧行走可以使机器人走遍迷宫的每个地方,这是走迷宫的一般方法。由于场地漆黑,粮据两手获得的墙壁触摸信息可以做出判断,我们称沿左侧行走的方法为左手走,称沿右侧
行走的方法为右手走。让机器人假设按左手法则行走,用左手去摸索左侧的墙壁,以确定前进的方向,同时右手伸向前方,避免在前进的过程中撞到前方拐弯处的墙上。 学生活动 通过观察和教师的讲解,了解机器人走迷宫的策略。 三、自主学习,任务探究 教师活动 1.布置学习任务一(走迷宫策略——左右手走) 阅读教材,根据教师所讲解的内容以及自主理解,强化对左右手走的理解。 2.指导学生以小组为单位,进行探究式协作学习,完成搭建走迷宫机器人,鼓励完成快的同学当小组长,辅导制作有困难的学生。 3.布置学习任务二(走迷宫程序的设计及子程序的引入) 通过分析“走迷宫机器人"的程序以及观察流程图,小组讨论出程序设计的意图,并独立完成程序的再设计。 对“子程序"概念的归纳及讲解,为学生整理一下编程思路。 学生活动 1.结合教材完成任务一。在练习过程中,完成快的同学辅导制作有困难的同学; 2.结合教材完成任务二。在实践过程中,收集出各组
java课设走迷宫含代码
目录1.设计目的 1.1课程设计的目的 2.总体设计 2.1设计思路 2.2设计方法 3.关键技术 4.程序流程 5.主要源代码 6. 运行结果及结论 7.参考文献
1.设计目的 1.1课程设计的目的 随着科技进步,时代发展,计算机走进了大家的生活。计算机程序强大的功能为使用者提供服务,编程语言也变得越来越流行。Java语言是当今流行的网络编程语言,它具有面向对象、跨平台、分布应用等特点。面向对象的开发方法是当今世界最流行的开发方法,它不仅具有更贴近自然的语义,而且有利于软件的维护和继承。 为了进一步巩固课堂上所学到的知识,深刻把握Java语言的重要概念及其面向对象的特性,熟练应用面向对象的思想和设计方法解决实际问题的能力,也是为了增加同学们娱乐游戏选择而开发了一个适合学生的,能提升思考力的迷宫冒险游戏,这既锻炼了动手能力,还能进行消遣娱乐,可谓一举两得。 2.总体设计 2.1设计思路 根据对游戏系统进行的需求分析,本系统将分为6个模块:分别是迷宫主界面模块、记时设计模块、迷宫设计模块、道路和障碍设计模块、动漫冒险者设计模块、出入口设计模块。实现的功能有: (1)迷宫的选择 玩家可以根据自身需求来进行选择简单迷宫、中等迷宫、难度迷宫三类中选择一类迷宫进行游戏。 (2)选择道路和障碍的图像 玩家可以根据个人喜好对迷宫中的道路和障碍的图片进行选择,但是图片的格式有规定,必须是“jpg”或“gif”格式的。 (3)游戏记时 当玩家控制迷宫中的动漫人物进行游戏时,计时器就开始进行记时,直到动漫人物到达出口时,记时结束,并在屏幕上显示游戏用时。 (4)开始游戏 玩家将鼠标移动至迷宫中的动漫冒险者,即可看到“单击我然后按键盘方向键”,单击后,游戏开始。玩家即可通过键盘上的方向键进行游戏。 (5)游戏结束 玩家控制动漫冒险者移动至迷宫地图的出口处时,游戏的计时器停止计时,并弹出信息框“恭喜您通关了”,游戏结束。
人类智能的特性表现在4个方面
:人类智能的特性表现在 4 个方面 。 A:聪明、灵活、学习、运用。 B:能感知客观世界的信息、能对通过思维对获得的知识进行加工处理、能通过学习积累知识 增长才干和适应环境变化、能对外界的刺激作出反应传递信息。 C:感觉、适应、学习、创新。 D:能捕捉外界环境信息、能够利用利用外界的有利因素、能够传递外界信息、能够综合外界 信息进行创新思维。 2:人工智能的目的是让机器能够 ,以实现某些脑力劳动的机械化。 A:具有智能 B:和人一样工作 C:完全代替人的大脑 D:模拟、延伸和扩展人的智能 3:下列关于人工智能的叙述不正确的有: 。 A:人工智能技术它与其他科学技术相结合极大地提高了应用技术的智能化水平。 B:人工智能是科学技术发展的趋势。 C:因为人工智能的系统研究是从上世纪五十年代才开始的,非常新,所以十分重要。 D:人工智能有力地促进了社会的发展。 4:人工智能研究的一项基本内容是机器感知。以下列举中的 不属于机器感知 的领域。 A:使机器具有视觉、听觉、触觉、味觉、嗅觉等感知能力。 B:让机器具有理解文字的能力。 C:使机器具有能够获取新知识、学习新技巧的能力。 D:使机器具有听懂人类语言的能力 5:自然语言理解是人工智能的重要应用领域,下面列举中的 不是它要实现的 目标。 A:理解别人讲的话。 B:对自然语言表示的信息进行分析概括或编辑。 C:欣赏音乐。 D:机器翻译。 6:为了解决如何模拟人类的感性思维,例如视觉理解、直觉思维、悟性等,研究者找到一个 重要的信息处理的机制是: 。 A:专家系统 B:人工神经网络 C:模式识别 D:智能代理 7: 根据下列选项来判断可以用指纹来鉴定的是: ①证件 ②签字 ③照片 ④ 密码 ⑤钥 匙 ⑥印签( ) A : ① ② B : ① ② ③ C:①②③④ D:①②③④⑤⑥ 8:下列选项错误的是( ) A:研究人工智能成为当前信息化社会的迫切需求 B:智能化是自动化发展的必要趋势 C:人工智能的研究方法:结构模拟、功能模拟和行为模拟 D:人工智能的实质是人造的智能 9:机器人之父是指: ( ) A:阿兰.图灵 B:伯纳斯.李 C:莎佩克 D:英格伯格和德沃尔 10:下列哪个应用领域不属于人工智能应用?( )
1/5
《机器人走迷宫》教学设计
《机器人走迷宫》教学设计 一、教学目标 1.知识与技能 学习红外传感器,完成机器人走迷宫; 理解机器人走迷宫的策; 学会编写机器人迷宫程序流程图; 掌握子程序及复杂程序的编写。 2.过程与方法 通过视频播放机器人走迷宫,激发学生兴趣; 通过教师讲解左右手走,培养学生的编程思维; 通过让学生自己动手编程、调试,体会成功的乐趣。 3.情感态度与价值观 通过制作走迷宫的机器人,培养学生的想象力和创造力; 培养学生积极探索、敢于实践、大胆创新的精神和意识。 二、教材分析 机器人走迷宫是本节课在经过几节实验课后,在掌握了相关知识后的一项大的、传统的,并具有一定任务难度的活动课,它要求我们的同学能够综合运用前面所学的各种传感器,加上自己的创造、创新,去分析、解释任务,搭建机器人,理解机器人走迷宫的策,写出详细的流程图,并通过运行机器人来检验其正确性,通过反复调试最终完成学习任务。同时,走迷宫也是一项比较有趣的活动,可以有效地考验学生的记忆和判断能力。 在前面的课程中,我们学习了红外传感器的使用,了解了红外传感器在实际中的某些应用,本节课我们继续使用红外传感器,通过动手搭建迷宫机器人,理解机器人走迷宫的策,学习子程序及复杂程序的编写。 任务驱动、自主探究、分组协作。
三、教学重点 1.理解机器人走迷宫的策; 2.学会如何编写机器人走迷宫的流程图。 四、教学难点 1.机器人行走方向的判断; 2.掌握子程序及复杂程序的编写; 3.红外传感器在实际生活中的多元运用。 五、教学过程 (一)创设情景,导入新课 教师活动 1.设置情景:欣赏走迷宫的机器人视频; 2.引入课题:引导学生分析机器人走迷宫的原理,观察走迷宫机器人中运用到的知识,引出本堂课的任务。 学生活动 欣赏视频,所学知识的整理和回顾,明确学习目标。 (二)展现课标,引入任务 教师活动 实例讲解机器人走迷宫的原理:如果一个人在漆黑的迷宫场地中寻找出口,怎么才能走出迷宫呢?一般地,人会通过手的触摸来寻找行走路线,沿迷宫的围墙的某一侧行走可以使机器人走遍迷宫的每个地方,这是走迷宫的一般方法。由于场地漆黑,根据两手获得的墙壁触摸信息可以做出判断,我们称沿左侧行走的方法为左手走,称沿右侧行走的方法为右手走。让机器人假设按左手法则行走,用左手去摸索左侧的墙壁,以确定前进的方向,同时右手伸向前方,避免在前进的过程中撞到前方拐弯处的墙上。 学生活动 揭过观察和教师的讲解,了解机器人走迷宫的原理。
大班游戏教案《走迷宫》
大班游戏教案《走迷宫》 【设计意图】 走迷宫能有效地提高幼儿的有意注意和空间智能,帮助幼儿学会整体观察、全方位思考,培养幼儿逆向思维能力及沉着冷静、敢于挑战的品质等。 我班幼儿对走迷宫有一定经验,但能力参差不齐。有的幼儿能迅速判断并选择通畅的路径走出迷宫; 有的幼儿很容易迷失方向,多次“碰壁”后才能走出迷宫; 有的幼儿急于求成,缺乏一定的耐心,等等。基于此,我们设计了这个活动,将数学学习融入走迷宫游戏中,让幼儿在轻松愉快又富有挑战的情境中,提升经验,形成策略,巩固走迷宫的方法。 【活动目标】 1. 掌握走迷宫的一般方法(从进口走向出口;遇到岔路口选路线遇到死胡同回岔路口换条路线走等),学会反向检查(即从出口走向进口)。 2. 喜欢走迷宫,体验探究成功的喜悦。 3. 通过小组合作的形式,运用自己喜欢的的方式表达表现。 4. 初步培养幼儿有礼貌的行为。 【活动准备】 1. 幼儿会认读数字l ~10,知道数序。
2. 教具:电脑课件或图片《走迷宫》一套(大鱼迷宫(图1),数字迷宫(图2),公园迷宫(图3)]。 3. 学具:第1组,“菠萝迷宫”图(图4)、盒子、笔;第2 组,“灰熊迷宫”图(图5)、盒子、笔;第3组,“到海边去”图(图6)、盒子、笔;第4 组,“去吃汉堡"图(图7)、盒子、笔;第5 组,“送 花给妈妈”图(图8)、盒子、笔。 4. 每个幼儿胸前挂一个夹子。 5. 在数学角投放多种已塑封的迷宫图,水彩笔,抹布。 【活动过程】 一、感知了解 1. 揭示课题,引发兴趣。 师(操作课件或图片):欢迎来到迷宫王国。今天,我们要在迷宫王国里玩闯关游戏。有没有信心获胜? 2. 引导幼儿了解走迷宫的方法。 (1)出示“大鱼迷宫”图。 ①感知线条迷宫的结构,了解走迷宫的方法。 师:这是什么迷宫?这个箭头表示什么?(迷宫的进口。)那个箭头又表示迷宫的什么?(出口。) 师:谁知道迷宫一般是怎么走的?(幼儿自由回答。)师幼(小结):迷宫图,拿到手,先找进口和出口,沿着进口通道走,最后顺利到出口。
最简单的c语言迷宫游戏实验报告
一、内容: 1、本游戏主要实现了人控制键盘方向键使小人(*)走出迷宫。 2、具有的功能: 1)、在游戏菜单里人可以选择不同难度的游戏进行游戏; 2)、在游戏过程中,可以通过键盘方向键使小人移动,走出迷宫; 3)、在游戏过程中,当人碰到墙壁(#)的时候小人过不去; 4)、当人顺利完成游戏之后,输出“========you are win!======”字样,30秒钟后自动返回到游戏菜单; 5)、在游戏过程中,人可以通过按Esc键返回游戏菜单;也可以可以按0直接退出游戏; 6)、在游戏菜单里,按0键可以退出游戏。 3、具体应用: 1)、人主要同过键盘的1,2,3数字键来选择游戏难度; 2)、在游戏中通过Esc键来返回菜单; 3)、同过0键退出游戏。 二、上机环境 操作系统:windows7 开发工具:VC6.0 三、函数调用关系图
四、各函数功能说明 main() 主函数; menu() 游戏菜单; roadcake() 消去小人路径; introduce() 游戏介绍; system(“cls”) 消屏函数; exit(0) 退出游戏; drawmg1() 画初级难度迷宫; drawmg2() 画中级难度迷宫; drawmg3() 画高级难度迷宫; control1() 控制初级难度游戏; control2() 控制中级难度游戏; control3() 控制高级难度游戏; 五、算法流程图 首先定义三个全局数组mg1[20][20]、mg2[30][30]、mg3[30][30]用于画出迷宫的地图;1表示墙(#),0表示空地(); Introduce( )函数里如果按Enter键,则调用menu( )函数,从键盘中输入相应的提示数字,进入难度不同的游戏;游戏的执行在此只初级难度进行描述,其余的难 度与其类似; 选了1后调用system(”cls”)进行清屏;drawmg1()函数进行迷宫的地图的绘
走迷宫机器人——控制系统的设计
走迷宫机器人——控制系统的设计 上海交通大学:钱真彦(F9903406班)苏稚英(F9903501班) 摘要 走迷宫机器人主要是基于自动导引小车(AGV——auto-guided vehicle)的原理,实现小车识别路线,判断并自动规避障碍,选择正确的行进路线。导引方式采用与地面颜色有较大差别的导引线,使用反射式光电传感器感知导引线,障碍判断采用机械式传感器。驱动电机采用直流电机,电机控制方式为单向PWM开环控制。控制核心采用51单片机,控制系统与电路用光耦完全隔离以避免干扰。控制上采用分时复用技术,仅用一块单片机就实现了信号采集,路线判断,电机控制。该技术可以应用于无人工厂,仓库,服务机器人等领域。 总体规划 对于走迷宫小车控制系统设计主要有三个方面:一、控制电路设计;二、传感器选择以及安放位置设计;三、程序设计。从总的方面来考虑,传感器的使用数量应该尽量少以减少单片机的信号处理量,但是又必须能使小车行驶自如。控制电路要根据选用的电机和传感器来设计,主要考虑稳定性,抗干扰性。 一、电路设计 控制电路主要有电机驱动电路,单片机接口电路,电源电路三个部分。考虑到电机的起动电流和制动时比较大,会造成电源电压不稳定容易对单片机和传感器的工作产生干扰,所以,电机驱动电路和单片机以及传感器电路用光耦隔离。传感器的电源直接使用24V蓄电池,单片机的电源则通过7805将24V电源转换到5V。这里主要对驱动电路进行一下介绍: 小车使用24V直流电机,对于这种小功率直流电机的调速方法一般有两种。 (1)线性型 使用功率三极管作为功率放大器的输出控制直流电机。线性型驱动的电路结构和原理简单,成本低,加速能力强,但功率损耗大,特别是低速大转距运行时,通过电阻R的电流大,发热厉害,损耗大。 (2)脉宽调制 另外一种是较常用的脉宽调速(PULSE WIDE MODULATION——PWM),这种调速方式有调速特性优良、调整平滑、调速范围广、过载能力大,能承受频繁的负载冲击,还可以实现频繁的无级快速启动、制动和反转的等优点。 因此决定采用PWM方式控制直流电机。PWM调速分为双向式和单向式两种 ①双向式 图一即为较常用的PWM调速电路,在一个脉冲周期内(T=Ta+Tb),T1和T3导通的时间为Ta,T2和T4导通的时间为Tb,这样在Ta这段时间内,电机通过的是正向电流,在Tb这段时间内为反相电流。当Ta=Tb时电机停转,Ta>Tb时电机正转,Ta
初中信息技术七年级《Scratch:小猫走迷宫》公开课精品教案
Scratch《小猫走迷宫》教学设计
刘亚丽 一、教材分析 Scratch 是一门全新的程序设计语言,用其可以很容易的创造交互式故事情节,动画,游 戏,可以大大增加学生的学习兴趣。本课是学生学习的第三课,前两节介绍了 scratch 的界面 和功能,角色的添加、绘制,角色造型的切换,舞台的设置,基本模块的简单应用等,本节课 通过 《小猫走迷宫》 这个生动有趣的实例, 让学生在实践中了解程序设计的思维方式, 熟悉 “动 作、控制、外观、侦测”等模块的用法,提高学生的学习兴趣。本课的内容有承上启下的作用, 为后面程序的编写做了铺垫。b5E2RGbCAP 二、学情分析 本课的教学对象是七年级内初班学生,大部分学生计算机操作水平较低,也是初次接触 scratch 软件, 通过前两节课的学习, 已经掌握了添加、 删除角色, 造型编辑与切换, 对 Scratch 编程创作有了一定的体会,能设计控制角色运动的简单脚本,为本节课的学习奠定了基础。并 且学生对学习本软件很高的兴趣,有利于后续课程的开展。p1EanqFDPw 三、教学目标分析 (一)知识与技能: 1. 学会使用方向键或键盘字母控制角色的运 2.学会使用 3. 能 够 将 4. 会用 , 插入到 模块表达角 , 等模块指令。 条件判断模块中,实现条件的选择功能。 色心里想说的内容。 动。
(二)过程与方法: 1.通过案例分析,让学生理解程序设计的思维方式。 2.通过教师演示、引导,学生自主练习,合作探究,实现知识的拓展和迁移。 3.通过自己编写游戏,激发学生学习兴趣,感受成功喜悦。 (三)情感态度价值观: 1.激发创作热情,建立科学的思维方式。 2.培养自主学习、合作学习的精神。 四、教学重点:“动作、控制、侦测”等模块的用法。 五、教学难点:对循环语句“重复执行”和条件判断语句“如果”的应用,能为游戏角色搭建
人工智能复习试题和答案及解析
一、单选题 1. 人工智能的目的是让机器能够(D),以实现某些脑力劳动的机械化。 A. 具有完全的智能 B.和人脑一样考虑问题 完全代替人D.C. 模拟、延伸和扩展人的智能 下列关于人工智能的叙述不正确的有(C) 2. 。 人工智能技术它与其他科学技术相结合极大地提高了应用技术 的智能化水平。 A. 人工智能是科学技术发展的趋势。B. C. 因为人工智能的系统研究是从上世纪五十年代才开始的,非常新,所以十分重要。 D.人工智能有力地促进了社会的发展。 3. 自然语言理解是人工智能的重要应用领域,下面列举中的(C )不是它要实现的目 标。 B.A. 理解别人讲的话。对自然语言表示的信息进行分析概括或编辑。 D.C. 欣赏音乐。机器翻译。 下列不是知识表示法的是(4.)。 A. B.计算机表示法谓词表示法
C. D.框架表示法产生式规则表示法 关于“与/ 或”图表示知识的叙述,错误的有(5. D)。 用“与/ 或”图表示知识方便使用程序设计语言表达,也便于计算机存储处理。A. “与/ 或”图表示知识时一定同时有“与节点”和“或节点”。B. C.“与/ 或”图能方便地表示陈述性知识和过程性知识。 D.能用“与/ 或”图表示的知识不适宜用其他方法表示。 6. 一般来讲,下列语言属于人工智能语言的是(D)。 A. VJ B. C# C. Foxpro D. LISP 7.专家系统是一个复杂的智能软件,它处理的对象是用符号表示的知识,处理的过程是(C )的过程。 A. 思考 B.回溯 C.推理 D.递归 确定性知识是指( A )知识。8. B.A. 可以精确表示的正确的 C. 在大学中学到的知识 D.能够解决问题的 下列关于不精确推理过程的叙述错误的是(9. B)。 不精确推理过程是从不确定的事实出发A. B.不精确推理过程最终能够推出确定的结论 C.不精确推理过程是运用不确定的知识 D.不精确推理过程最终推出不确定性的结论 ..
幼儿园大班游戏:走迷宫
大班游戏:走迷宫 【设计意图】 走迷宫能有效地提高幼儿的有意注意和空间智能,帮助幼儿学会整体观察、全方位思考,培养幼儿逆向思维能力及沉着冷静、敢于挑战的品质等。 我班幼儿对走迷宫有一定经验,但能力参差不齐。有的幼儿能迅速判断并选择通畅的路径走出迷宫;有的幼儿很容易迷失方向,多次“碰壁”后才能走出迷宫;有的幼儿急于求成,缺乏一定的耐心,等等。基于此,我们设计了这个活动,将数学学习融入走迷宫游戏中,让幼儿在轻松愉快又富有挑战的情境中,提升经验,形成策略,巩固走迷宫的方法。 【活动目标】 1.掌握走迷宫的一般方法(从进口走向出口;遇到岔路口选路线;遇到死胡同回岔路口换条路线走等),学会反向检查(即从出口走向进口)。 2.喜欢走迷宫,体验探究成功的喜悦。 【活动准备】 1.幼儿会认读数字l~10,知道数序。 2.教具:电脑课件或图片《走迷宫》一套(大鱼迷宫(图1),数字迷宫(图2),公园迷宫(图3)]。 3.学具:第1组,“菠萝迷宫”图(图4)、盒子、笔;第
2组,“灰熊迷宫”图(图5)、盒子、笔;第3组,“到海边去”图(图6)、盒子、笔;第4组,“去吃汉堡"图(图7)、盒子、笔;第5组,“送花给妈妈”图(图8)、盒子、笔。 4.每个幼儿胸前挂一个夹子。 5.在数学角投放多种已塑封的迷宫图,水彩笔,抹布。 【活动过程】 一、感知了解 1.揭示课题,引发兴趣。 师(操作课件或图片):欢迎来到迷宫王国。今天,我们要在迷宫王国里玩闯关游戏。有没有信心获胜? 2.引导幼儿了解走迷宫的方法。 (1)出示“大鱼迷宫”图。 ①感知线条迷宫的结构,了解走迷宫的方法。 师:这是什么迷宫?这个箭头表示什么?(迷宫的进口。)那个箭头又表示迷宫的什么?(出口。) 师:谁知道迷宫一般是怎么走的?(幼儿自由回答。) 师幼(小结):迷宫图,拿到手,先找进口和出口,沿着进口通道走,最后顺利到出口。 ②个别幼儿尝试。 师:谁会走“大鱼迷宫”?(先请个别幼儿上来“行走”,然后师幼一起分析如何很快找到出口和进口,最后请一位幼儿用水彩笔在迷宫上画出路线。)
C语言的图形编程应用—迷宫游戏
课程设计报告书 题目C语言的图形编程应用—迷宫游戏 系别计算机工程系 专业计算机科学与技术 班级 姓名 指导教师 下达日期2011 年12 月14 日 设计时间自2011年12月19日至2011年12月30日
指导教师评语
课程设计任务书
目录 Ⅰ.程序设计目的 (3) Ⅱ.运行环境 (3) Ⅲ.程序功能 (3) Ⅳ.程序设计内容 (3) Ⅳ.1设计界面 (3) Ⅳ.2设计思路 (3) Ⅳ.3流程图 (4) Ⅳ.4主要功能模块 (4) Ⅴ.小结与启发 (10) Ⅵ.参考文献 (11)
Ⅰ.程序设计目的 通过典型实例―——迷宫问题,加深对递归算法的理解和编制,掌握数组的运用。 Ⅱ.运行环境 主要在Windows 2000/XP操作系统TC下运行。 Ⅲ.程序功能 迷宫是深受大家喜爱的游戏之一,一般设计迷宫为二维平面图,将迷宫的左上角做入口,右下角做出口,求出从入口点到出口点的一条通路,作为线性结构的典型应用,大多是用非递归方法实现,输出用0代表通路,1代表墙壁。而本程序生成一个美观逼真的迷宫图,它是随机生成的且迷宫大小可以改变,迷宫的大小为N*N,N预定义为常数,修改N的值可以改变迷宫的大小(只要不超过屏幕显示范围),而程序不必做修改。程序采用了两种运行方式:一种系统自动运行探索,用递归方法实现;一种是由人工操作探索通路,这利用了手动操作8个代表不同的方向的键位来实现。用白色表示可走的路,棕色表示墙壁不可以通过。 Ⅳ.程序设计内容 Ⅳ.1设计界面 系统运行首先出现提示字符串“Please select hand(1)else auto”,询问是选择人工探索还是系统自动探索,当用户输入字符1按回车键后出现一个迷宫图,红色矩形块(表示探索物)出现在左上角,这是可以代表8个方向的字符选择通路,遇到墙壁不能通行,按回车键结束探索,如果这时探索物移动到右下角出口,则显示找到通路信息,否则显示没找到通路信息。如图1为人工探索通路的界面。 在提示信息后,如果输入的字符不是1,则系统自动查找通路,如果没有找到通路,则显示没有找到通路信息。如果找到通路,则用红色标记走过的路径。 图1 Ⅳ.2设计思路 程序首先要考虑迷宫的表示,这是一个二维关系图,典型的存贮储方式是选择二维数组,数组元素的值只有两种状态,所以取值为0或1,0表通路,1表示墙壁,这里取名为map。图形的显示就可以根据数组元素的值来确定。如果是人工探索,则根据按键来确定探索物的位置坐标,
中学信息技术《机器人走迷宫》教案
中学信息技术《机器人走迷宫》教案 第15课机器人走迷宫 【教学目标】 .知识与技能 ◆学习红外传感器,完成机器人走迷宫; ◆理解机器人走迷宫的策略; ◆学会编写机器人迷宫程序流程图; ◆掌握子程序及复杂程序的编写。 .过程与方法 ◆通过视频播放机器人走迷宫,激发学生兴趣; ◆通过教师讲解左右手走,培养学生的编程思维; ◆通过让学生自己动手编程、调试,体会成功的乐趣。 .情感态度与价值观 ◆通过制作走迷宫的机器人,培养学生的想像力和创造力; ◆培养学生积极探索、敢于实践、大胆创新的精神和意识。 【教法选择】 任务驱动、自主探究、分组协作。 【教学重点】 .理解机器人走迷宫的策略;
.学会如何编写机器人走迷宫的流程图。 【教学难点】 .机器人行走方向的判断; .掌握子程序及复杂程序的编写; .红外传感器在实际生活中的多元运用。 【教学过程】 一、创设情景,导入新 教师活动 .设置情景:欣赏走迷宫的机器人视频; .引人课题:引导学生分析机器人走迷宫的原理,观察走迷宫机器人中运用到的知识,引出本堂课的任务。 学生活动 欣赏视频,所学知识的整理和回顾,明确学习目标。 二、展现目标,引入任务 教师活动 实例讲解机器人走迷宫的原理及左、右手走:如果一个人在漆黑的迷宫场地中寻找出口,怎么才能走出迷宫呢?一般地,人会通过手的触摸来寻找行走路线,沿迷宫的围墙的某一侧行走可以使机器人走遍迷宫的每个地方,这是走迷宫的一般方法。由于场地漆黑,粮据两手获得的墙壁触摸信息可以做出判断,我们称沿左侧行走的方法为左手走,称沿右侧行走的方法为右手走。让机器人假设按左手法则行走,用
左手去摸索左侧的墙壁,以确定前进的方向,同时右手伸向前方,避免在前进的过程中撞到前方拐弯处的墙上。 学生活动 通过观察和教师的讲解,了解机器人走迷宫的策略。 三、自主学习,任务探究 教师活动 .布置学习任务一 阅读教材,根据教师所讲解的内容以及自主理解,强化对左右手走的理解。 .指导学生以小组为单位,进行探究式协作学习,完成搭建走迷宫机器人,鼓励完成快的同学当小组长,辅导制作有困难的学生。 .布置学习任务二 通过分析“走迷宫机器人"的程序以及观察流程图,小组讨论出程序设计的意图,并独立完成程序的再设计。 对“子程序"概念的归纳及讲解,为学生整理一下编程思路。 学生活动 .结合教材完成任务一。在练习过程中,完成快的同学辅导制作有困难的同学; .结合教材完成任务二。在实践过程中,收集出各组制作机器人时出现的问题,协作探究,找到解决问题的方法,
C语的迷宫小游戏_源代码
C语言编写的迷宫游戏源代码 #include
C程序课程设计报告—走迷宫
C程序课程设计报告—走迷宫 一课题分析 1.1 设计要求 走迷宫:绘制和选择迷宫地图,系统能够自动寻找出口,支持鼠标和键盘操作。通过画图函数设定迷宫,运用数据结构的相关知识,利用一定的算法,实现单步找寻迷宫出口的操作。 1.2 实现功能 小游戏,游戏者从左侧入口处走到右侧的出口处,则胜;中途退出,则败。 二整体设计 2.1框架设计 1.定义操作键键码,用#define实现。 2.系统BGI初始化模块: 3.画出迷宫模块:其中包括边框、出口、入口、墙壁等相关信息;用函数drawmaze()实现此操作。 4.定义迷宫中的人模块:用函数move()实现此操作。实现点的移动,并判断是否到达出口。 5.退出系统模块:用if函数进行判断,如胜则输出-You win,如败则输出you lose.用函数getch()查看结果。 三详细设计 3.1界面设计 此游戏界面采用图形设计。 主界面设计如下:
图1 走迷宫图3.2结构设计: 用if语句实现人的坐标移动和判断游戏者输赢。 四总结 参考文献 暂无 附录#include
智能机器人行为能力的
智能机器人行为能力的获得 Chenghwn(chenghw) Chenghwn@https://www.360docs.net/doc/579177623.html, 1前言 如何让智能机器人具有像人一样的行为能力,正是本文努力讨论的目的,这里讨论的不是技术性的细节问题,而是策略方向,并从理论上证明了这种策略的可行性。本文先讨论了如何设置智能机器人的运动中枢、运动调节中枢、感觉中枢的结构与功能及相互关系(同时也讨论了为什么要这样设置。),然后在此基础上以智能机器人的运动结构在直线与空间中的运动学习为例,讨论了智能机器人是如何通过这些设置的结构与功能来获得像人一样的运动能力的。 2运动中枢、运动调节中枢、感觉中枢 就如人一样,智能机器人的行为应由专门的中枢来控制。 本文对智能机器人控制运动的中枢的结构与功能的设置参考了人的运动皮质及小脑等的结构与功能。这里将控制运动的中枢分为:1、运动中枢(类似于人脑的运动皮质及前运动区。)2、运动调节中枢(类似于小脑及基底节等。) 智能机器人的运动中枢的特定记忆柱群的兴奋使智能机器人的某一运动结构具有某一基本运动。而这时一基本运动调节中枢的同时兴奋能使这一运动结构的这一基本运动具有某一运动特点。编程时我们可以适当的设置运动调节中枢的联系与兴奋特点(调节基本运动中枢的记忆柱的兴奋,或直接调节运动结构的运动),使某一运动结构的基本运动,在调节中枢的兴奋下获得我们所需要的运动特点。 智能机器人应具有什么运动结构及这一结构应具有什么样的基本运动,这一基本运动在什么样的调节中枢的调节下具有我们所需要的什么运动特点……,这些都是具体的技术问题,在现有的科技水平下应不难解决。本文所要讨论的是,智能机器人是如何通过学习获得:要进行某项运动时是如何达到目的地,也就是说当智能机器人需要某一特点的运动时,智能机器人是如何选择相应的运动中枢的记忆柱群及相应调节中枢的记忆柱群兴奋而使这一特点的运动得于实现。解决了这个问题,也就从战略上解决了智能机器人的运动问题,剩下的其它的技术性问题都好说。 打个简单的比方:这里的运动中枢就象程序的主体,调节中枢就象程序的补丁插件,当一基本运动在哪一方面我们不满意的时候,我们都可给它打个补丁插件来使这一基本运动的运动特点让我们满意,而新打上的“补丁”,都能通过下面所论述的奖惩学习过程来获得正确的调节能力。 每个运动结构(比如一个手指)都有其基本的运动动作(如伸或屈),每个基本的运动动作都对应运动中枢(就如人脑的皮质运动中枢、前运动皮质)中相应的记忆柱群。这个中枢有联络区能与其它中枢产生兴奋性记忆联系。同时存在多个运动调节中枢,它们能分别调节每个基本运动的某一运动特点。运动中枢中一群记忆柱的兴奋使对应的一运动结构具有某一运动,而相应调节中枢的兴奋使这一运动结构所进行的这一运动具有某一我们所需要的特点(比如伸或屈的速度及稳定性等。)。所有的基本运动都存在众多的基本调节方式(如减慢运动的调节—通过力的改变进行调节),每类基本调节方式都对应相应的中枢(比如小脑的模块化兴奋)。这样,每个运动的某类基本调节都由相应的中枢控制,而且每个运动结构的基本运动在运动的基本调节中枢都应存在相应的结构。它们也存在联络区,它们的联络区
“走迷宫的机器人”设计与制作
“走迷宫的机器人”设计与制作 走迷宫的机器人是移动机器人路径规划算法的典型应用,在国际上迷宫机器人一直是控制领域和计算机领域的研究热点问题,文章结合迷宫机器人走迷宫的实际特点,对机器人走迷宫的一些算法进行了研究和改进,从而实现了机器人在无人为干预下自主走迷宫的目标。 标签:迷宫机器人;单片机;数据通信;智能化 1 走迷宫的机器人设计的目的 随着科学技术的高速发展,國内的教育和科研机构也日益关注机器人事业,有关科研工作在深度和规模上逐渐提高。一些著名高校基本形成了完整的研究体系,对推动高校的科技创新和产学研一体化产生了重要作用,因此我们将设计一种机器人,能够在迷宫中寻找出最短路径。 2 走迷宫的机器人系统设计 本设计以STC89C52单片机系统为控制中心,通过4路红外电路检测黑线,并保证小车能够按照黑线前行,而当单片机检测到需要转向的传感器信号时,单片机通过改变PWM波的占空比来调整小车两侧的电机转速,从而使其两侧轮产生速度差,以实现小车的转向。同时超声波探测周围障碍物,并通过WIFI模块实时传输给计算机。小车遍历整个迷宫区域,同时计算机绘制出迷宫概况,并用递归算法计算出最短路径。 3 走迷宫的机器人硬件设计 3.1 总体硬件结构图 说明:小车以STC89C52单片机控制器,采用红外传感器及其处理模块实现对黑线的循迹;通过单片机产生PWM波对电机进行驱动并通过转速对小车的方向和速度进行控制;用WIFI模块将小车周边障碍物情况传送给电脑,电脑经过运算后将最优路径传输回小车。数据采集系统以单片机为控制核心,模拟实况、算法分析由计算机完成。 3.2 微处理器的选择 单片机我们选用STC89C52,该单片机是宏晶公司推出的新一代单片机,指令代码完全兼容传统8051单片机;内部集成512字节RAM,具有EEPROM功能和看门狗功能,可上电擦除;通用I/O口32个,3个16位定时器/计数器,且功耗低。对于该项目,晶振不能采用常用12兆晶振,否则通信时便会产生积累误差,进而产生波特率误差,影响通信的同步性。采用11.0592兆晶振可以得到非常准确的数值,方便通信。
《机器人走迷宫》参考教案#(精选.)
第15课机器人走迷宫 【教学目标】 1.知识与技能 学习红外传感器,完成机器人走迷宫; 理解机器人走迷宫的策; 学会编写机器人迷宫程序流程图; 掌握子程序及复杂程序的编写。 2.过程与方法 通过视频播放机器人走迷宫,激发学生兴趣; 通过教师讲解左右手走,培养学生的编程思维; 通过让学生自己动手编程、调试,体会成功的乐趣。 3.情感态度与价值观 通过制作走迷宫的机器人,培养学生的想象力和创造力; 培养学生积极探索、敢于实践、大胆创新的精神和意识。 【教材分析】 机器人走迷宫是本节课在经过几节实验课后,在掌握了相关知识后的一项大的、传统的,并具有一定任务难度的活动课,它要求我们的同学能够综合运用前面所学的各种传感器,加上自己的创造、创新,去分析、解释任务,搭建机器人,理解机器人走迷宫的策,写出详细的流程图,并通过运行机器人来检验其正确性,通过反复调试最终完成学习任务。同时,走迷宫也是一项比较有趣的活动,可以有效地考验学生的记忆和判断能力。 在前面的课程中,我们学习了红外传感器的使用,了解了红外传感器在实际中的某些应用,本节课我们继续使用红外传感器,通过动手搭建迷宫机器人,理解机器人走迷宫的策,学习子程序及复杂程序的编写。 任务驱动、自主探究、分组协作。 【教学重点】 1.理解机器人走迷宫的策; 2.学会如何编写机器人走迷宫的流程图。
【教学难点】 1.机器人行走方向的判断; 2.掌握子程序及复杂程序的编写; 3.红外传感器在实际生活中的多元运用。 【教学过程】 一、创设情景,导入新课 教师活动 1.设置情景:欣赏走迷宫的机器人视频; 2.引入课题:引导学生分析机器人走迷宫的原理,观察走迷宫机器人中运用到的知识,引出本堂课的任务。 学生活动 欣赏视频,所学知识的整理和回顾,明确学习目标。 二。展现课标,引入任务 教师活动 实例讲解机器人走迷宫的原理:如果一个人在漆黑的迷宫场地中寻找出口,怎么才能走出迷宫呢?一般地,人会通过手的触摸来寻找行走路线,沿迷宫的围墙的某一侧行走可以使机器人走遍迷宫的每个地方,这是走迷宫的一般方法。由于场地漆黑,根据两手获得的墙壁触摸信息可以做出判断,我们称沿左侧行走的方法为左手走,称沿右侧行走的方法为右手走。让机器人假设按左手法则行走,用左手去摸索左侧的墙壁,以确定前进的方向,同时右手伸向前方,避免在前进的过程中撞到前方拐弯处的墙上。 学生活动 揭过观察和教师的讲解,了解机器人走迷宫的原理。 三、自立学习,任务探究 教师活动 1.布置学习任务一(走迷宫策——左右手走) 阅读教材,根据教师所讲解的内容以及自主理解,强化对左右手走的理解。2.指导学生以小组为单位,进行探究式协作学习,完成括建走迷宫机器人,鼓励完成快的同学当小组长,辅导制作有困难的学生。