各类卫星星座系统
GLONASS系统
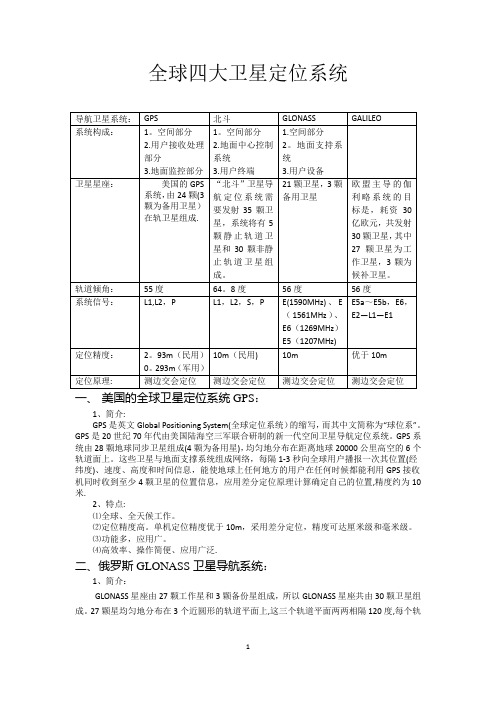
卫星星座
• 共有卫星24颗,正式使用卫星21颗,备份星3 颗 • 分别布置在A、B、C三个轨道面上。每个轨 道 面上有八颗卫星 • 轨道高度为19100km(轨道半径为 25510km),轨道面的倾斜角为64.8°,周期 为11h15.73m
用户设备
• 到1995年为止,俄罗斯已研制了两代用户设备 • 用户设备能接收卫星发射的导航信号,并测量其 伪距和伪距变化率,同时从卫星信号中提取并处 理导航电文。接收机处理器对上述数据进行处理 并计算出用户所在的位置、速度和时间信息。 GLONASS系统提供军用和民用两种服务。GLONASS 系统绝对定位精度水平方向为16米,垂直方向为 25米。目前,GLONASS系统的主要用途是导航定位, 当然与GPS系统一样,也可以广泛应用于各种等级 和种类的定位、导航和时频领域等。
系统的功能
系统的主要作用是实现全 球、全天候的实时导航与定位, 另外,还可以用于全球时间传 递 系统工作时,由地面控制 设备负责搜索、处理卫星的轨 道和信号信息,并向每颗卫星 发射控制指令和导航信息 每颗 卫星上都装备有着 稳定度的铯原子钟, 并接收地 面控制站的导航信息和控制指 令,星载计算机对其中的导航信 息进行处理, 生成导航电文 用户通过接收机接收卫星信
星座建立的阶段
第一阶段
第二阶段
第三阶段
1983年1985年, 星座实验 时期
1986年1993年, 完成飞行 实验验证, 初始系统 运行
1993年1995年,完 成了24颗星 的星座系统, 系统投入运 行
系统的组成
ห้องสมุดไป่ตู้
卫星 星座
GLONASS
地面控 制设施
用户 设备
地面控制设施
• 这部分也称为地基控制设施,由系统控制 中心和分布在俄罗斯各地的指令跟踪站网 组成。 • 主要包括6个组成单元:系统控制中心 (SCC)、中央同步器(SC)、指令和 跟踪站(CTS,即地基跟踪站)、相位控 制系统(PCS)、光量子跟踪站 (QOTS)、导航字组控制设备(NFCE)
全球四大卫星定位系统
全球四大卫星定位系统一.GPS系统(美国)二.北斗系统(中国)三.GLONASS系统(俄罗斯)四.伽利略卫星导航系统(欧盟)GPS系统(美国)GPS系统是美国从上世纪70年代开始研制,历时20年,耗资近200亿美元,于1994年全面建成的新一代卫星导航与定位系统。
GPS利用导航卫星进行测时和测距,具有在海、陆、空全方位实时三维导航与定位能力。
它是继阿波罗登月计划、航天飞机后的美国第三大航天工程。
如今,GPS已经成为当今世界上最实用,也是应用最广泛的全球精密导航、指挥和调度系统。
GPS系统概述GPS系统由空间部分、地面测控部分和用户设备三部分组成。
(1)空间部分GPS系统的空间部分由空间GPS卫星星座组成。
(2)控制部分控制部分包括地球上所有监测与控制卫星的设施。
(3)用户部分GPS用户部分包括GPS接收机和用户团体。
主要功能:导航测量授时标准:全球定位系统(GPS)测量规范GB/T 18314-2001 Specifications for global positioning system (GPS) surveys种类:GPS卫星接收机种类很多,根据型号分为测地型、全站型、定时型、手持型、集成型;根据用途分为车载式、船载式、机载式、星载式、弹载式。
北斗卫星导航系统中国北斗卫星导航系统(BeiDou Navigation Satellite System,统(GPS)、俄罗斯格洛纳斯卫星导航系统(GLONASS)之后第三个成熟的卫星导航系统。
段和用户段三部分组成,可在全球范围内全天候、全天时为各类用户度0.2米/秒,授时精度10纳秒。
系统构成北斗卫星导航系统空间段由5颗静止轨道卫星和30颗非静止轨道卫星组成,中国计划2012年左右,“北斗”系统将覆盖亚太地区,2020年左右覆盖全球。
中国正在实施北斗卫星导航系统建设,已成功发射16颗北斗导航卫星。
根据系统建设总体规划,2012年左右,系统将首先具备覆盖亚太地区的定位、导航和授时以及短报文通信服务能力。
GPS系统如何组成GPS卫星星座
GPS系统如何组成GPS卫星星座GPS工作卫星及其星座 由21颗工作卫星和3颗在轨备用卫星组成GPS卫星星座,记作(21+3)GPS星座。
24颗卫星均匀分布在6个轨道平面内,轨道倾角为55度,各个轨道平面之间相距60度, 即轨道的升交点赤经各相差60度。
每个轨道平面内各颗卫星之间的升交角距相差90度, 一轨道平面上的卫星比西边相邻轨道平面上的相应卫星超前30度。
在两万公里高空的GPS卫星,当地球对恒星来说自转一周时,它们绕地球运行二周, 即绕地球一周的时间为12恒星时。
这样,对于地面观测者来说,每天将提前4分钟见到同一颗GPS 卫星。
位于地平线以上的卫星颗数随着时间和地点的不同而不同,最少可见到4颗, 最多可见到11颗。
在用GPS信号导航定位时,为了结算测站的三维坐标,必须观测4颗 GPS卫星,称为定位星座。
这4颗卫星在观测过程中的几何位置分布对定位精度有一定的影响。
对于某地某时,甚至不能测得精确的点位坐标,这种时间段叫做“间隙段”。
但这种 时间间隙段是很短暂的,并不影响全球绝大多数地方的全天候、高精度。
GPS工作卫星的编号和试验卫星基本相同。
地面监控系统对于导航定位来说,GPS卫星是一动态已知点。
星的位置是依据卫星发射的星历—描述卫星运动及其轨道的 的参数算得的。
每颗GPS卫星所播发的星历,是由地面监控系统提供的。
卫星上的各种设备是否正常 工作,以及卫星是否一直沿着预定轨道运行,都要由地面设备进行监测和控制。
地面监控系统 另一重要作用是保持各颗卫星处于同一时间标准—GPS时间系统。
这就需要地面站监测 各颗卫星的时间,求出钟差。
然后由地面注入站发给卫星,卫星再由导航电文发给用户设备。
GPS工作卫星的地面监控系统包括一个主控站、三个注入站和五个监测站。
GPS信号接收机GPS 信号接收机的任务是:能够捕获到按一定卫星高度截止角所选择的待测卫星的信号, 并跟踪这些卫星的运行,对所接收到的GPS信号进行变换、放大和处理,以便测量出GPS信号从卫星 到接收机天线的传播时间,解译出GPS卫星所发送的导航电文,实时地计算出测站的三维位置, 位置,甚至三维速度和时间。
GPS、GALILEO、BDS、GLONASS四大卫星定位系统的论述
GPS、GALILEO、BDS、GLONASS四大卫星定位系统得论述一、基本介绍➢GPS数量:由24颗卫星组成。
轨道:高度约20200公里,分布在6条交点互隔60度得轨道面上。
精度:约为10米、用途:军民两用。
进展:1993年全部建成,正在实验第二代卫星系统,计划发射20颗。
➢GLONASS数量:24颗卫星组成;精度:10米左右;用途:军民两用;进展:目前已有17颗卫星在轨运行,计划2008年全部部署到位、➢GALILEO数量:30颗中高度圆轨道卫星组成,27颗为工作卫星,3颗为候补;轨道:高度为24126公里,位于3个倾角为56度得轨道平面内;精度:最高精度小于1米;用途:主要为民用;进展:2005年12月28日首颗实验卫星已成功发射,预计2008年前可开通定位服务。
➢BDS数量:3颗卫星组成,2颗为工作卫星,1颗为备用卫星;用途:军民两用;进展:前两颗分别于2000年与2003年发射成功。
二、系统组成❖空间部分➢GPS:GPS得空间部分就是由24颗卫星组成(21颗工作卫星;3颗备用卫星),它位于距地表20200km得上空,均匀分布在6个轨道面上(每个轨道面4 颗),轨道倾角为55°。
卫星得分布使得在全球任何地方、任何时间都可观测到4颗以上得卫星,并能在卫星中预存导航信息,GPS得卫星因为大气摩擦等问题;随着时间得推移,导航精度会逐渐降低➢GLONASS:GLONASS系统采用中高轨道得24颗卫星星座,有21颗工作星与3颗备份星,均匀分布在3个圆形轨道平面上,每轨道面有8颗,轨道高度H=19000km,运行周期T=11h15min,倾角i=64。
8°。
➢GALILEO:如下图所示,30颗中轨道卫星(MEO)组成Galileo得空间卫星星座。
卫星均匀地分布在高度约为23616km得3个轨道面上,每个轨道上有10颗,其中包括一颗备用卫星,轨道倾角为56°,卫星绕地球一周约14h22min,这样得布设可以满足全球无缝隙导航定位、卫星得设计寿命为20年,每颗卫星都将搭载导航载荷与一台搜救转发器。
四大卫星定位系统
全球四大卫星定位系统一、美国的全球卫星定位系统GPS:1、简介:GPS 是英文Global Positioning System(全球定位系统)的缩写,而其中文简称为“球位系”。
GPS是20世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统。
GPS系统由28颗地球同步卫星组成(4颗为备用星),均匀地分布在距离地球20000公里高空的6个轨道面上。
这些卫星与地面支撑系统组成网络,每隔1-3秒向全球用户播报一次其位置(经纬度)、速度、高度和时间信息,能使地球上任何地方的用户在任何时候都能利用GPS接收机同时收到至少4颗卫星的位置信息,应用差分定位原理计算确定自己的位置,精度约为10米.2、特点:⑴全球、全天候工作。
⑵定位精度高。
单机定位精度优于10m,采用差分定位,精度可达厘米级和毫米级。
⑶功能多,应用广。
⑷高效率、操作简便、应用广泛.二、俄罗斯GLONASS卫星导航系统:1、简介:GLONASS星座由27颗工作星和3颗备份星组成,所以GLONASS星座共由30颗卫星组成。
27颗星均匀地分布在3个近圆形的轨道平面上,这三个轨道平面两两相隔120度,每个轨道面有8颗卫星,同平面内的卫星之间相隔45度,轨道高度2.36万公里,运行周期11小时15分,轨道倾角64。
8度。
格洛纳斯卫星发射2、特点:⑴抗干扰能力强。
⑵GLONASS系统采用了军民合用、不加密的开放政策。
⑶GLONASS系统采用频分多址(FDMA)方式,根据载波频率来区分不同卫星(GPS是码分多址(CDMA),根据调制码来区分卫星).3、GLONASS与GPS不同之处:一是卫星发射频率不同。
GPS的卫星信号采用码分多址体制,每颗卫星的信号频率和调制方式相同,不同卫星的信号靠不同的伪码区分。
而GLONASS采用频分多址体制,卫星靠频率不同来区分,每组频率的伪随机码相同.由于卫星发射的载波频率不同,GLONASS可以防止整个卫星导航系统同时被敌方干扰,因而,具有更强的抗干扰能力。
卫星定位系统原理及各国发展的历史

简述:卫星定位系统原理及各国发展的历史1、子午卫星导航系统(NNSS)该系统又称多普勒卫星定位系统,它是58年底由美国海军武器实验室开始研制,于64年建成的“海军导航卫星系统”(Navy Navigation Satellite System)。
这是人类历史上诞生的第一代卫星导航系统。
1957年10月前苏联成功发射了第一颗人造卫星后,美国霍普金斯大学应用物理实验室的吉尔博士和魏分巴哈博士对卫星遥测信号的多普勒频移产生了浓厚的兴趣。
经研究他们认为:利用卫星遥测信号的多普勒效应可对卫星精确定轨;而该实验室的克什纳博士和麦克卢尔博士则认为已知卫星轨道,利用卫星信号的多普勒效应可确定观测点的位置。
霍普金斯大学应用物理实验室研究人员的工作,为多普勒卫星定位系统的诞生奠定了坚实的基础。
而当时美国海军正在寻求一种可以对北极星潜艇中的惯性导航系统进行间断精确修正方法,于是美国军方便积极资助霍普金斯大学应用物理实验室开展进一步的深入研究。
1958年12月在克什纳博士的领导下开展了三项研究工作:①研制卫星;②建立地球重力场模型以便卫星的精确定轨和准确预报卫星的空间位置;③研制多普勒接收机。
经过众人的努力子午卫星导航系统于1964年1月正式建成并投入军方使用,直至19 67年7月该系统才由军方解密供民间使用。
此后用户数量迅速增长,最多达9.5万户,而军方用户最多时只有650个,不足总数的1%,可见因生产的需要民间用户远远大于军方。
1.1 子午卫星导航系统的组成(1)卫星星座:子午卫星星座,由六颗独立轨道的极轨卫星组成。
在设计上要求卫星的轨道的偏心率为零,轨道倾角i =90°;卫星运行周期为T=107m;卫星高度约为H=1075km;按理论上的设计,六颗卫星应当均匀分布在相互间隔为30度轨道平面上。
但由于早期卫星入轨精度不高,各卫星周期、倾角、偏心率都存在不同程度的误差,故各卫星轨道进动的大小和方向也都不尽相同,这样经过一段时间后各卫星轨道间的间距就变得疏密不一。
星座导航及其卫星通信系统的研究

星座导航及其卫星通信系统的研究一、引言卫星导航与通信已经成为了现代社会不可或缺的技术,星座导航及其卫星通信系统作为卫星导航与通信的重要组成部分,受到了国内外学者的广泛关注。
本文将详细阐述星座导航及其卫星通信系统的起源、发展、现状及未来发展趋势。
二、星座导航的概念及历史星座导航是指将多颗卫星安排在不同轨道上,形成一个星座网络来提供导航和定位服务的技术。
星座导航系统最早起源于1960年代美国海军的TRANSIT卫星导航系统,它由6-8颗卫星组成,并定期更新,并在1974年正式向公众开放。
其他比较知名的星座导航系统还包括GPS、GLONASS、BeiDou等。
三、星座导航系统的原理星座导航系统是通过测量卫星与地面用户之间的距离来实现定位和导航,常用的技术包括天线接收器接收到卫星信号、定位计算、信号校正等。
在定位计算中,经纬度和高度是星座导航系统最基本的定位信息。
用户需要的所有信息都可以通过卫星信号来获取。
四、星座导航系统的卫星通信卫星通信是将信息通过卫星传输到任何一个地球上的任何一个点的技术,并能满足不同地区的通信需求。
星座导航系统可以通过多颗卫星来实现全球覆盖,并进行卫星通信。
卫星通信系统的主要组成部分包括发射机、卫星、接收机以及随从站等。
五、星座导航及其卫星通信系统的应用星座导航及其卫星通信系统可以应用于许多领域,如军事、民用、科学研究、航空航天以及金融等。
它可以为旅行者提供可靠的导航和定位服务,为救援提供及时响应,为金融行业提供安全快捷的交易通道等。
六、星座导航及其卫星通信系统的未来展望随着技术的不断发展,星座导航及其卫星通信系统将面临更多的挑战和机遇。
未来星座导航及其卫星通信系统的发展方向包括更高的性能、更精确的定位服务、更高的数据传输速率、更低的能耗以及更优化的卫星网络结构等。
七、结论星座导航及其卫星通信系统是卫星导航与通信的重要组成部分,随着技术的不断发展,它将在日常生活的各个领域中发挥越来越重要的作用。
卫星星座设计

设计基本出发点
以最少数量的卫星实现对指定区域的覆盖
6
6.2 卫星星座设计
卫星星座选择
续1
仰角要尽可能高 传输延时尽可能小 星上设备的电能消耗尽可能少 如果系统采用星际链路,则面内和面间的星际链路 干扰必须限制在可以接收的范围内 对不同国家、不同类型的服务,轨位的分配需要遵 循相应的规章制度 多重覆盖问题以支持特定业务(GPS定位)或提供有 QoS保证的业务
多标准,难以全球通用
蜂窝小区小,频率利用率高
全球通用
频率利用率低
提供足够的链路余量以补偿信号 遮蔽效应使得通信链路恶化 衰落 适合于人口密度高,业务量密集 适合于低人口密度、业务量 的城市环境 有限的农村环境
5
6.2 卫星星座设计
卫星星座的定义
具有相似的类型和功能的多颗卫星,分布在相似的 或互补的轨道上,在共享控制下协同完成一定的任 务
续4
sub-satellite point
c
/s
coverage edge of satellite
式中S是每轨道面的卫星数量
Street of coverage Nhomakorabea10
6.2 卫星星座设计
极轨道星座
顺行/逆行轨道面和‘缝隙(seam)’ π星座 由于存在逆向飞行现象, 星座第一个和最后一个 轨道面间的间隔小于其 它相邻轨道面间的间隔
续15
倾角85º 的单重全球覆盖近极轨道星座参数
) 1 (º 103.8252 97.3951 93.9877 66.2803 64.4511 63.3170 48.3551 47.6005 47.0729 38.0816 37.7000 37.4139 31.4151
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
可见GPS导航系统卫星部分的作用就是不断 地发射导航电文和误差校正值。 由于用户接受机使用的时钟与卫星星载时钟 不可能总是同步,所以除了用户的三维坐标x、 y、z外,还要引进一个Δt即卫星与接收机之 间的时间差作为未知数,然后用4个方程将这 4个未知数解出来。所以如果想知道接收机所 处的位置,至少要能接收到4个卫星的信号。 用户可用4颗卫星确定4个导航参数:纬度、 经度、高度、时间。
首先,接收机通过卫星发射的伪码与本地 伪码的相关运算,可获求得卫星信号的传 输时延。 然后,用户从接收到导航电文中,可以提 取时间标记,该标记标明发送信号什么时 候离开的卫星,再利用导航电文中的卫星 星历数据,可以推算出卫星发射电文时所 处位置,以及卫星与用户的距离,由此进 一步推导用户在大地坐标系中的位置速度 等信息。
卫星编号
GPS系统包括SVN(空间飞行器编号)、PRN(伪随机码 编号)、SVID(卫星号)、NAVSTAR(导航星编号)以及 卫星代号在内的五类卫星编号 GPS每颗卫星向下播发的导航信号中调制的伪随机码是唯 一的,并且采用PRN编号的方式来对伪随机码进行标记区分 。 目前在轨运行的GPS卫星向下播发伪随机码的PRN编号 范围为1~32 PRN编号是地面用户进行信号捕获、跟踪的关键参数,必须
10.2 GLONASS
“格洛纳斯GLONASS”是俄语中“全球卫星导航系统”的缩 写。 设计有24颗卫星正常工作、3颗维修中、3颗备用、1颗测试 中。分布于3个圆形轨道面上,轨道高度19100千米,倾角 64.8°。这3个轨道平面两两相隔120°,同平面内的卫星之 间相隔45°,轨道周期为11小时15分钟。 每颗格洛纳斯卫星广播两种信号,L1和L2信号。具体地说, 频率分别为L1=1602+0.5625*k(MHz)和 L2=1246+0.4375*k(MHz),其中 k为1~24为每颗卫星的频 率编号,同一颗卫星满足L1/L2=9/7。民用码仅调制在L1上, 而军用码在(L-1和L2)双频上
P码
P码又被称为精码,它被调制在L1和L2载波上,是10MHz的 伪随机噪声码,其周期为七天。在实施AS时,P码与W码进 行模二相加生成保密的Y码,一般和称P(Y)码 P码用4个12位移位寄存器的PN序列产生,重复周期266.4 天,被截断成38个短序列,每个序列码长6.1871012,频率 10.23MHz,重复周期7天,码间距0.1微秒,相当于30m。P 码因频率较高,不易受干扰,定位精度高达3米,因此受美 国军方管制,并设有密码,一般民间无法解读,主要为美国 军方服务。
差分校正和监测系统(SDCM)
俄罗斯的SDCM增强系统的空间段由三颗 GEO卫星——“射线”(Luch或Loutch)卫星 组成,分别为Luch-5A、Luch-5B和Luch-4。 “射线”卫星是苏联/俄罗斯民用数据中继卫 星系列,第一颗卫星“Luch-5A”,于2011年 发射到西经16°的轨道位置,第二颗卫星 “Luch-5B”,于2012年发射到东经95°的轨 道位置。到了2014年,随着第三颗卫星 “Luch-4”发射到东经167°轨道位置, SDCM的空间段将部署完成。
GPS的基本原理
GPS的基本原理是测量出已知位置的卫星到用户接 收机之间的距离,然后综合多颗卫星的数据就可知 道接收机的具体位置。 卫星的位置可以根据星载时钟所记录的时间在卫星 星历中查出,每一颗卫星都会广播其星历表。 用户到卫星的距离则通过纪录卫星信号传播到用户 到达时间(TOA),再将其乘以光速得到。由于大 气层电离层的干扰,这一距离并不是用户与卫星之 间的真实距离,而是伪距(PR)。
保证编号的连续性和可用性。
GPS卫星发射频率
当GPS卫星正常工作时,会不断地用1和0二进制码元组成 的伪随机码(简称伪码)发射导航电文。导航电文包括卫 星星历、工作状况、时钟改正、电离层时延修正、大气折 射修正等信息。 GPS卫星发射两种频率的载波信号,即频率为 1575.42MHz的L1载波和频率为1227.60HMz的L2载波,它 们的频率分别是基本频率10.23MHz的154倍和120倍,波 束方向图能覆盖约半个地球。在L1和L2上又分别调制着多 种信号,这些信号主要有: 分别是民用的粗/截获码(C/A码)和军用的精密码(P 码),P码加密后构成Y码,因此常将精密码记为P(Y)码。 对0A码测得的伪距称为UA码伪距,精度约为20米左右, 对P码测得的伪距称为P码伪距,精度约为2米左右。
由于俄罗斯地处高纬度地区,GLONASS卫星的轨道设计上 照顾了这一点。在高纬度地区,如极地,卫星分布和定位表 现会比GPS好一些。 与其他GNSS系统采用CDMA码分多址不同,GLONASS使 用了FDMA频分多址的策略。对接收机带宽要求略高。为了 平衡这个问题,GLONASS 民用信号选择了较低的码速率以 节约带宽,其码速率只有GPS民用信号速率一半,大概 511kHz,导致单点定位精度低于GPS,现在标准差椭圆半 径在5m左右。 GLONASS卫星的载波上也调制了两种伪随机噪声码:S码 和P码 另外GLONASS系统的数据公开程度非常好,有一个网站叫 分析中心,网址 /?target=https%3A//glonass-iac.ru/ 点开里面可以选英语,提供GLONASS和GPS卫星的实时参 数和系统状况,以及性能分析。 GLONASS对EGO卫星也直接给出卫星xyz坐标,因EGO卫 星变化小,直接采用差值积分就可以解算
目录
10.1 美国的GPS 10.2 俄国的GLONASS 10.3 欧洲的伽利略系统 10.4 中国的北斗系统 10.5 印度 10.6 日本天顶 10.7卫星系统辅助技术
10.1 GPS来自全球定位系统(Global Positioning System, GPS)是美国从20世纪70年代开始研制的, 耗资300亿美元,于1994年全面建成,2018 年开始启动第三代,精度可达0.6米。
一个主控站,5
GPS星座
卫星距地面2万公里(20200km)倾斜圆轨道上的24颗卫星 组成,旋转周期为12小时。 由24颗分布在6个等间隔轨道上的卫星组成,每个轨道平面 上有4颗卫星,与赤道成55度的相同方向运行,空间间隔为 90度,3颗为活动的备用卫星。 每颗卫星大约5小时在地平线以上,同时位于地平线以上的 最少4颗,最大11颗,一般可观察到6-9颗。 卫星上的核心设备是高精度铯原子钟(稳定度为10-13~1014),具有抗辐射性能,它发射标准频率信号,为GPS定 位提供高精度的时间标准。
GPS全球卫星定位系统由三部分组成:
空间部分:GPS星座 地面控制部分:地面监控系统
个全球监测站和3 个地面控制站组成。 负责维护每颗GPS卫星的星历(即描述卫星运动及其 轨道的参数)。对于导航定位功能而言,GPS卫星的 星历是唯一的动态已知参数。监控卫星正常工作,以 及保持各颗卫星处于同一时间标准。地面站监测出相 关信号以后,将控制命令通过地面注入站发给卫星。 用户设备部分:GPS 信号接收机。 在GPS中使用单向传输,只有从卫星到用户的链路, 用户不需要发射机,只需要一个GPS接收机即可。
PVT解算
PVT解算即指用户接收机的位置、速度和时 间解算,可以解算速度,一般需要六颗星。 利用星历来解算 推算星位置的 2h解算一次 利用历书来解算 防止欺骗
卫星信号的主要误差来源
1、射频干扰:不同卫星,不同星座,地面电 磁波发射源和人为干扰
GPS的L2和L5频率没有L1纯净,许多国家准许固定和移动服务器工作在1215M-1240MHz波段上 在高功率发射机中偶尔可能产生非线性效应(如放大器饱和),引起低功率的谐波,形成对GNSS接收 机的带内RF干扰 地中海有些电台发射台产生强的带内谐波,是L1接收机无法工作
GLONASS与GPS不同之处
一是卫星发射频率不同。GPS的卫星信号采用码分多址体制 ,每颗卫星的信号频率和调制方式相同,不同卫星的信号靠 不同的伪码区分。而GLONASS采用频分多址体制,卫星靠 频率不同来区分,每组频率的伪随机码相同。由于卫星发射 的载波频率不同,GLONASS可以防止整个卫星导航系统同 时被敌方干扰,因而,具有更强的抗干扰能力。 二是坐标系不同。GPS使用世界大地坐标系(WGS-84), 而GLONASS使用前苏联地心坐标系(PE-90)。 三是时间标准不同。GPS系统时与世界协调时相关联,而 GLONASS则与莫斯科标准时相关联。 随着GLONASS与GPS的合作,地理坐标和时间误差以逐步 消失,新的GLONASS也将采用码分多址
CA码
C/A码又被称为粗捕获码,它被调制在L1载波上,是1MHz 的伪随机噪声码(PRN码),其码长为1023位(周期为1ms )。由于每颗卫星的C/A码都不一样,因此,我们经常用它 们的PRN号来区分它们。 C/A码是Gold码,码长1023,频率1.023MHz,重复周期1 毫秒,码间距1微秒,相当于300m。
10.3 伽利略系统
由27颗卫星加3颗备用星,与赤道相隔120度在三个轨道平 面 2016年11月18日,伽利略卫星数量达到18颗 频率有六种RHCP(右旋圆极化)导航信号 L波段,L1F,L1P(1559-1592 MHZE2-L1-E1) L1F:OS、CS、SOL L1P:RPS E5a:1176.45MHz、OS 导航和授时 E5b:1207.14MHz(1196.91—1207.14MHz)OS、CS、SOL E6C:1278.75MHz 商业服务 E6P:PRS
当我们把GPS的天线或者GPS接收机(内置GPS天线)放在一个固定的 位置的时候,GPS的定位输出并不是一层不变的,而是在不断的围绕一 个圆心跳动,如果记录这种跳动数据的时间足够长的话,你可以看到跳 动的轨迹是一个圆,这个圆的圆心才是GPS天线真实的位置,或者说是 GPS天线准确的位置,从距离上看,这个圆的半径在十几米以内,这就 是GPS定位的误差; 为什么会跳动呢?因素非常多,其中最主要的因素就是时间信号的抖动 造成了定位点的跳动,因为GPS系统在核心上是一个时间系统,是通过 不同卫星时间信号到达天线时的时间差,解三角方程组,而得出经纬度 坐标的,时间信号的抖动,必然造成了位置信息的跳动; 如果认为仅仅是在十几米的范围内跳动(换算成相应的时间抖动)还是 可以接受的话,其实你还忽略了GPS定位上的“飞点”现象,所谓的“ 飞点”其实也是定位信息的跳动,跳动的距离特别远,可以达到几百甚 至上千公里,只不过出现的几率很小,而且在GPS显示方面已经用软件 的方式把这些“飞点”过滤掉了而已,这种过滤仅仅是“面子”上的过 滤,实际上的抖动仍然存在; 造成GPS定位“飞点”的时间抖动就非常大了(甚至接近分钟的量级) ,如果系统对时间的敏感性要求较高的话,这样的“飞点”对系统的损 害是相当大的。