环境系统阐述教程之箱式大气质量模型
环境系统分析教程之箱式大气质量模型(ppt 43张)
度常数;Q为污染源的源强;u为平均风速;t为时间坐标
一、单箱模型
3. 模型的解
dC ubh ( C C ) lbQ 若K=0,则控制方程为 lbh 0 dt
以上控制方程的初始条件为:t=0时,C=C0;
其解析解为:
Ql C C [ 1 e 0 uh
u t l
]
Ql 当t=∞时, CP C 0 uh
若K≠0,则其解析解为:
Q C u 0K ( K)t h l C C [ 1 e ] 0 u K l
当t=∞时, C P
Q C0 K C0 h u K l
思考
已知某工业基地位于一山谷地区,计算的混合高度h=120m,该地区长
45km,宽5km,上风向的风速为2m/s,SO2的本地浓度为0。该基地建 成后的计划燃煤量为7000t/d,煤的含硫量为3%,SO2转化率为85%,
2 2 2 C C C C C u E E E x x 2 y 2 2 t x x y z z
各种高架点源模型的基础
一、无边界的点源模型
1. 瞬时单烟团正态扩散模型
瞬时释放的单烟团正态扩散模型是一切正态扩散模型的基础。 假设点源位于坐标原点,释放时间为t=0,在无边界的大气环 境中,瞬间排出的一个烟团将沿三维方向扩散。基于上述基 本运动方程及对应假设条件,得空间任一点、任一时刻的污 染物浓度:
1. 瞬时单烟团正态扩散模型
令三个坐标方向上的污染物分布的标准差为:
2 2 2 σ 2E t , σ 2E t , σ 2E t x x y y z z
2 2 2 (y u t) M (x u t) (z u t) y x z C(x, y, z, t) exp 2 2 2 3 σ 2 σ 2 σ 8 π σ σ σ x y z 2 x y z
环境质量评价系统分析 (1)
第一章1、 环境质量:一般指在一个具体的环境中,环境的总体或环境的某些要素对人类的生存繁衍及社会经济发展的适宜程度。
2、 环境质量评价:是对环境的优劣所进行的一种定量描述,即按照一定的评价标准和评价方法对一定区域范围内的环境质量进行说明、评定和预测。
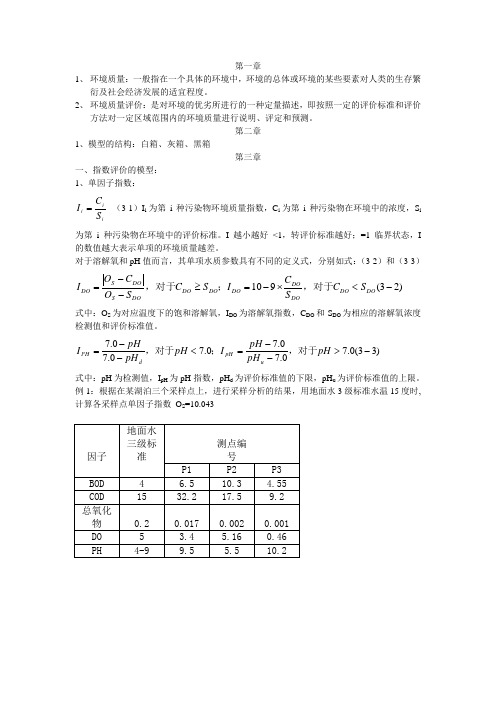
第二章1、模型的结构:白箱、灰箱、黑箱第三章一、指数评价的模型: 1、单因子指数:iii S C I =(3-1)I i 为第i 种污染物环境质量指数,C i 为第i 种污染物在环境中的浓度,S i 为第i 种污染物在环境中的评价标准。
I 越小越好 <1,转评价标准越好;=1 临界状态,I 的数值越大表示单项的环境质量越差。
对于溶解氧和pH 值而言,其单项水质参数具有不同的定义式,分别如式:(3-2)和(3-3))23(910-<⨯-=≥--=DO DO DODODO DO DO DOS DO S DO S C S C I S C S O C O I ,对于;,对于 式中:O S 为对应温度下的饱和溶解氧,I DO 为溶解氧指数,C DO 和S DO 为相应的溶解氧浓度检测值和评价标准值。
)33(0.70.70.70.70.70.7->--=<--=pH pH pH I pH pH pH I u pH d PH ,对于;,对于式中:pH 为检测值,I pH 为pH 指数,pH d 为评价标准值的下限,pH u 为评价标准值的上限。
例1:根据在某湖泊三个采样点上,进行采样分析的结果,用地面水3级标准水温15度时, 计算各采样点单因子指数 O S =10.043(1) 均值型多因子指数:∑∑====n i iin i i S C n I n I 1111 n 为参与评价的因子数,其余符号含义同单因子环境质量指数。
(2) 计权型多因子环境质量指数:∑==ni i i I W I 1W i 为第i 个环境因子的权系数(3) 内梅罗指数:2)()(22i i AveI MaxI I +=MaxIi 为各单因子指数的最大者,AveI i 为各单因子环境质量指数的平均值。
大气污染模拟-盒子模式
第一节
¾ 盒子模式是最简单的空气质量模式
欧拉盒子模式
¾ 欧拉盒子模式把模拟区域设想为一个 简单的盒子: 底部为地面,面积一般几百平方公里 盒子顶通常为混合层顶 在东西南北存在假想的盒子侧面 ¾假设污染源排放的污染物在盒子内部 瞬时混合均匀 ¾ 盒子内部的污染物与外部的交换一般 通过风传输及混合层的变化实现(即盒 子高度的变化)
0 dc s q s vs cs − cs = − kc s − c s + dt H H τr
解析解:
cs (t ) =
A⎞ A ⎛ + ⎜ c s (0) − ⎟e − Bt B⎠ B ⎝
其中, 0 qs c s A= + = 2(源排放 ) + 0.1(输入 ) = 2.1μg / m 3 / h (源项) H τr
v dc s q s = − kc s − s c s dt H H
解析解: 其中,
D=
0 (初始条件: c s (0) = c s )
cs (t ) =
D ⎛ 0 D ⎞ − Et + ⎜ c s − ⎟e E⎠ E ⎝
qs = 2(源排放 ) = 2 μg / m 3 / h (源项) H
vs E=k+ = 0.03( 反应消耗 ) + 0.036(干去除 ) = 0.066h −1 (汇项) H
类似的,y方向和z方向上传输导致的单位时间内气 体浓度的变化分别为:
−
∂ ( Fy ) ∂y
=−
∂ ( Fz ) ∂ (vn) ∂ ( wn) =− ; − ∂y ∂z ∂z
因此,可以用如下的公式来表达该体积内气体浓度随时间的变化:
∂n ∂ ( un) ∂ (vn) ∂ ( wn) − − + P − L = −∇ ⋅ (Un) + P − L =− ∂t ∂x ∂y ∂z
环境监测领域中的大气污染模型使用教程

环境监测领域中的大气污染模型使用教程大气污染是当前全球范围内面临的重要环境问题之一。
为了保护人类健康和环境可持续发展,科学家们开发了各种大气污染模型来预测和评估不同因素对空气质量的影响。
本文将介绍环境监测领域中常用的大气污染模型以及如何使用它们进行预测和分析。
1. 模型介绍在环境监测领域中,常用的大气污染模型包括:CMAQ模型、WRF-Chem模型、AERMOD模型等。
这些模型基于物理、化学和数学原理,通过模拟大气过程、污染物传输和变化,提供了对大气污染的准确预测和评估。
- CMAQ模型(Community Multiscale Air Quality Model)是一种广泛应用于大气环境模拟和预测的模型。
它可以模拟大尺度到细尺度的空气流动和污染物传输,包括气溶胶、氧化物、二氧化氮等。
- WRF-Chem模型(Weather Research and Forecasting model coupled with Chemistry)是一种将大气动力学模拟和化学传输过程相结合的模型。
它可以模拟气象过程和污染物分布,有助于理解不同气象条件下的空气污染形成和传播机理。
- AERMOD模型是一种广泛用于工业源排放和城市环境中污染物传输建模的模型。
它基于高斯模型原理,能够预测工业源的排放对周围地区空气质量的影响。
2. 模型使用教程为了能够准确有效地使用这些大气污染模型,以下是一些基本的使用教程和注意事项:2.1 数据准备在使用大气污染模型之前,首先需要准备好相关的输入数据。
这些数据包括气象数据、地理信息、土地利用数据、废气排放数据等。
可以从气象台、环境保护部门等机构获取这些数据,也可以使用开源数据集和模型提供的默认数据。
2.2 模型配置配置大气污染模型是一个重要的步骤,决定了模型的运行方式和输出结果的准确性。
在配置模型时,需要设置模型的运行时间、空间范围、污染物的初始浓度和排放源信息等。
每个模型都有相应的配置文件和参数,使用者需要根据应用需求进行相应的设置。
06第6章:大气质量模型
1. 单箱模型 单箱模型是计算一个区域或城市的大 气质量的最简单的模型。这个模型假定 所研究的区域或城市为一个箱子所笼罩, 这个箱子的平面尺寸就是所研究的区域 或城市的平面,箱子的高度是由地面计 算的混合层高度。
图1-箱式模型
根据整个箱子的输入、输出,可以写出 质量平衡方程:
dC lbh ubh (C 0 C ) lbQ KClbh dt
箱式大气质量模型
有很多模型用来预测和模拟大气质量, 其中最简单的是箱式大气质量模型。 箱式大气质量模型的基本假设是:在模 拟大气的污染物浓度时,可以把所研究 的空间范围看成是一个尺寸固定的“箱 子”,这个箱子的高度就是从地面计算 的混合层高度,而污染物浓度在箱子内 处处相等。 箱式大气质量模型可以分为单箱模型和 多箱模型。
Ql C C0 (1 e uh
ut l
Hale Waihona Puke )( 2)当式(2)中的t很大时,箱内的污染 物浓度C随时间的变化趋于稳定状态,这 时的污染物浓度称为平衡浓度Cp,由式 (2)可得:
Ql C p C0 uh
( 3)
如果污染物在箱内的衰减速度常数 K≠0,式(1)的解为:
Q h C0 K C C0 u/l K u 1 exp( ( K ) t ) l
对于子箱1-4 :
A 和 D 均为已知,则: 1 CA D
(10)
由于第一列4个子箱的输出就是第2列4个子 箱的输入,如果Δl和Δh是常数,对第二列来说, D A的值和式(8)中相等,只是 有所变化,这时:
Q5 l a1C1 a2C2 D a3C3 a4C4
( 8)
大气环境质量评价与预测模型(ppt 52页)

22
3.2 大气环境影响预测模型
E、熏烟模型
假定发生熏烟后,污染物浓度在垂直方向为均匀分布,则熏烟条件下的地面浓度:
Cf
Q
2 uh f yf
exp
y2
2
2 yf
( p)
t
( p) -
1
2
exp
t2 2
dt
p hf He
z
yf
y
He 8
式中:hf——逐渐增厚的混合层高度,m; yf——熏烟条件下的侧向扩散参数,它们是下风距离x的函数,m; (p)——正态分布函数,它用来反映原稳定状态下的烟羽进入混合层中
8
3.1 大气环境质量现状评价
(5)美国橡树岭大气质量指数
I 橡
5 5.7 i1
Ci Si
1.37
式中:Ci ——第i种污染物24小时平均浓度; Si——第i种污染物的大气质量标准。
质量分级 I橡
优良 <20
I橡与大气环境质量分级
好
尚可
差
20~39 40~59 60~79
坏 80~100
危险 >100
不同大气稳定度下的m值
大气稳定度级别
A
B
C
D
E
F
城市
0.10
0.15
0.20
0.25
0.30
0.30
m
乡村
0.07
0.07
0.10
0.15
0.25
0.25
15
3.2 大气环境影响预测模型
3.2.2 大气环境影响评价预测模型
(1)点源扩散的高斯模型
A、 连续点源高斯模型的推出
C
t
环境系统分析教程之箱式大气质量模型

数据来源:实时监测、历史数据、卫星遥感等 数据处理:大数据分析、机器学习、深度学习等 模型优化:根据大数据进行模型参数调整和优化 应用领域:环境监测、气象预报、城市规划等
PART SIX
假设大气层是静止的,但实 际上大气层是流动的
假设大气层是均匀的,但实 际上大气层是不均匀的
假设大气层是均质的,但实 际上大气层是不均质的
,a click to unlimited possibilities
汇报RT TWO
箱式模型是一种大气质量模型,用于模拟大气污染物的传输、扩散和转化过程。
箱式模型将大气划分为若干个箱体,每个箱体代表一个区域,区域内的大气污染 物浓度和传输过程可以通过模型进行模拟。
箱式模型的基本原理是利用质量守恒定律和扩散方程,通过求解这些方程得到大 气污染物的浓度分布和传输过程。
箱式模型可以应用于大气环境质量评价、污染源解析、污染控制等方面。
单箱模型:只有一个箱体,适用于简单大气环境 双箱模型:有两个箱体,适用于复杂大气环境 多箱模型:有多个箱体,适用于更复杂的大气环境 混合模型:结合单箱、双箱或多箱模型,适用于特定大气环境
参数的调整:根据 模型运行结果调整 参数,提高模型精 度
参数的优化:采用 优化算法对参数进 行优化,提高模型 性能
参数的验证:通过 实验验证参数优化 的效果,确保模型 的准确性和可靠性
箱式大气质量模型与其他大气质量模型的比较和结合 箱式大气质量模型与其他环境模型的结合,如气候模型、水文模型等 箱式大气质量模型与其他领域模型的结合,如交通模型、经济模型等 箱式大气质量模型与其他技术手段的结合,如遥感技术、大数据技术等
假设大气层是线性的,但实 际上大气层是非线性的
模型需要大量 的气象数据, 但实际数据获
第3章大气环境模型

dC lbh ubhC0 lbQ ubhC KClbh dt
箱内污染 物量的瞬 时变化 箱内恒 定增加 的污染 物的量 推出箱 内的污 染物的 量 衰减的 污染物 的量
推进箱内 的污染物 的量
当不考虑衰减,即K为0时,上式的解为:
Ql ut l C C0 (1 e ) uh
Q y2 (z H )2 C exp[( )]{exp[ ] 2 2 2 y 2 z 2 u y z (z H ) exp[ ]} 2 2 z
2
• 上式为适应于连续排放高架源的高斯公 式。式中H为有效源高,是实际源高和烟 气抬升高度之和。
平坦地面高架点源地面浓度的估算
经过以上假设和一系列推导简化, 上述方程可以得到解为下式:
Q y z c ( x, y , z ) exp[( 2 2 )] 2 y 2 z 2 u y z
式中 • C(x,y,z)为下风向某点(坐标为x,y,z)处的 空气污染物浓度 • Q为污染物的源强(g/s) • U为排气筒出口处平均风速 / y z 为水平方向和垂直方向的扩散参 • 数,是下风向距离x及大气稳定度的函数。
0.941015 1.09356
h n0Q H / u x
n1 h n2 s
T Qh 0.35Pa Qv Ts T Ts Ta n0 : 烟气热状况及地表状况系数 n1:烟气热释放率指数 n2:烟囱高度指数 H s : 烟囱距地面的几何高度,超过240米时取240米 Pa : 大气压力(实测值或取平均值) Q v:实际排烟率(m /s)
常用的大气质量模型
• • • • • 箱式模型 高斯高架点源扩散模型 高斯地面点源扩散模型 高斯线源模型(略) 面源模型(略)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
M为0时刻,由原点(0,0,0)瞬间排放量,即污染物的源强
1. 瞬时单烟团正态扩散模型
C为箱内的污染物浓度;l为箱的长度;b为箱的宽度;h为箱的 高度;C0为初始条件污染物的本底浓度;k为污染物的衰减速 度常数;Q为污染源的源强;u为平均风速;t为时间坐标
一、单箱模型
3. 模型的解
若0,则控制方程为
lbddhC tub(C h0C)lbQ
以上控制方程的初始条件为:0时,0;
其解析解为: CC0Q uh[l1eu lt]
C(yz x,t,,)2πQ xσ πyσzex p 2 1 σ yy 2 2σ z2 z 2
Q为在原点(0,0,0)连续稳定排放的污染源源强,即 单位时间排放的污染物量
二、高架连续排放点源模型
高烟囱产生的地面污染物浓度比具有相同源强的低烟囱要低。 烟囱高度是大气污染控制的主要变量之一。
直上升); ②是因烟流温度高于环境温度产生的静浮力。
这两种动力引起的烟气浮力运动称烟云抬升,烟云抬升 有利于降低地面的污染物浓度。
高架源须考虑到地面对扩散的影响。
用“像源法”处理——把P点污染物浓度看成
为两部分(实源和像源)作用之和。
建立三个坐标系: 1、以实源在地面的投 影点为原点;P点坐标 为(x,y,z); 2、以实源为原点; 3、以像源为原点。
当∞时,
CP
C0
Ql uh
若K≠0,则其解析解为:
CC0
Q h C0K[1e(ul K)t uK
]
l
当∞时,
CP
C0
Q h
C0 K
u K
l
思考
已知某工业基地位于一山谷地区,计算的混合高度120m,该地区长45, 宽5,上风向的风速为2,2的本地浓度为0。该基地建成后的计划燃煤量 为7000,煤的含硫量为3%,2转化率为85%,试用单箱模型估计该地区 的2浓度。
? 烟囱高度?
烟囱的有效高度=物理高度+烟气抬升高度;
物理高度:烟囱实体的高度; 烟气抬升高度:烟气在排出烟囱口之后在动量和热浮力 的作用下能够继续上升的高度,这个高度可达数十至上 百米,对减轻地面的大气污染有很大作用。
烟云抬升的原因有两个: ①是烟囱出口处的烟流具有一初始动量(使它们继续垂
可以分为单箱模型和多箱模型
一、单箱模型
1. 基本假设: 箱子的平面尺寸就是所研究的区域或城市的平面, 箱子的高度是由地面计算的混合层高度h。
推
2. 基本模型
推流通 量uc0
l Q
h uc b
dC lb hu dt
b0 h(C C )lb Q kCl
二、多箱模型
在纵向和垂直向把单箱分为多箱,以考虑纵向 和垂直向大气污染物的不均匀分布,但横向还 是作为一个箱体,不考虑横向浓度的不均匀分 布。
多箱模型可以反映区域或城市大气质量的空间 差异,其精度要比单箱模型好,是模拟大气质 量的有效工具。
第六章 大气质量模型
第四节 点源扩散模型
大气污染物在大气中的运动,一般呈三维运动, 其基本运动方程为:
3. 无边界无风的瞬时点源模型
在无风的条件下,0
Cy (zx ,t,) , 8 π 3 M σ xσ yσ ze x p 2 x σ 2 x 22 y σ 2 y 22 z σ 2 z 2
4. 无边界连续点源模型
连续稳定点源,∂ ∂0,在有风(≥1.5)时,可 以忽略扩散作用。
假定大气流场是均匀的,和都是常数,C为湍 流时平均浓度:
C tux C xEx x 2 C2Ey y 2 C2Ez z 2 C2
各种高架点源模型的基础
一、无边界的点源模型
1. 瞬时单烟团正态扩散模型
瞬时释放的单烟团正态扩散模型是一切正态扩散模型的基础。
假设点源位于坐标原点,释放时间为0,在无边界的大气环境 中,瞬间排出的一个烟团将沿三维方向扩散。基于上述基本 运动方程及对应假设条件,得空间任一点、任一时刻的污染 物浓度:
2. 无边界有风的点源模型
设风向平行于x轴,忽略y方向和z方向上的流动,即0, 则在空间任一点、任一时刻的污染物浓度可以用下式 计算。
Cy (z,tx, ), 8 π 3 M σ x σ y σ ze x p ( x 2 σ u x 2 x t2)2 y σ 2 y 22 z σ 2 z 2
令三个坐标方向上的污染物分布的标准差为:
σ x 2 2x t, E σ y 2 2y t, E σ z 2 2z tE
Cy z (t,x , ) , 8 π 3 M σ x σ y σ ze x (p 2 x σ u x 2 x t2 ) ( 2 y σ u y 2 y t2 ) ( 2 z σ u z 2 z t2 )
C t u x C x u y C y u z C z x (x E C x ) y (y E C y ) z (z E C z ) k
忽略污染物扩散过程中自身的衰减,即0,同时忽略y方向 和z方向上的流动,即,上式可以简化为:
C t u x C x x (x E C x ) y (y E C y ) z(zE C z)
环境系统分析教程 第13讲
第六章 大气质量模型
第三节 箱式大气质量模型
箱式大气质量模型
基本假设:在模拟大气的污染物时可以把研究的空间 范围看成是一个尺寸固定的“箱子”,高度就是从地 面计算的混合层高度,而污染物浓度在箱子内处处相 等。
混合层是由于温度层结不连续产生上下层间的湍流不连续而形成。下层空 气湍流强,上层空气湍流弱,这就造成不连续面以下能够发生强烈的湍流 混合,使得位温、水汽等要素随高度分布均匀。由于混合层是湍流受热对 流控制的近地面层以上的大气边界层,所以它也常被称为自由对流层。