材料力学教学课件16讲简单超净定梁
合集下载
材料力学-简单的超静定问题
2021/6/16
4
2021/6/16
5
2021/6/16
6
§6-2 拉压超静定问题
拉压变形时的胡克定律 l FN l EA
综合考虑变形的协调条件、虎克定律和静力 学平衡条件求解拉压超静定问题。
2021/6/16
7
例 已知1、2杆抗拉刚度为E1A1, 3杆抗拉刚度为E3A3, F的大小已知,求各杆内力。
13
2
l
A
A*
l3
FN 3l E3 A3
9
4、联解方程
FN1
2 cos
F
E 3 A3
E 1 A1 c o s 2
FN 3
1
2
F E 1 A1
cos3
E 3 A3
2021/6/16
10
装配应力的计算:超静定结构中由于加工误 差, 装配产生的应力。
平衡方程:
FN1 FN2
F N 3(F N 1F N 2)cos
超静定问题:若未知力的个数多于独立的平
衡方程的个数,仅用静力平衡方程便无法确定
全部未知力,这类问题为超静定问题。相应结
构称为超静定结构。
2021/6/16
2
超静定次数:未知力个数与独立平衡方程数之 差,也等于多余约束数。
多余约束:在结构上加上的一个或几个约束, 对于维持平衡来说是不必要的约束称多余约束。 对应的约束力称多余约束反力。
由于超静定结构能有效降低结构的内力及变 形,在工程上应用非常广泛。
2021/6/16
3
基本静定系:解除多余约束代之于未知力后的 结构。
●超静定问题的解法:综合考虑变形的几何相 容条件、物理关系和静力学平衡条件。
材料力学 简单的超静定问题

l1 F N 1l1 E 1 A1
FN 3 l 3 E 3 A3
FN1
FN3
a a A
A1 FN2
l3
FN 3l3 E 3 A3
(3)
(4)补充方程:由几何方程和物理方程得:
F N 1l1 E1 A1
2
cos a
(5)联解(1)、(2)、(3)式,得:
FN 1 FN 2 E1 A1 F cos a 2 E1 A1 cos a E 3 A3
第六章
简单的超静定问题
1
第六章
§6-1
§6-2
简单的超静定问题
超静定问题及其解法
拉压超静定问题
§6-3 §6-4
扭转超静定问题 简单超静定梁
2
§6-1
超静定问题及其解法
1.单纯依靠静力平衡方程能够确定全部未知力(支反 力、内力)的问题,称为静定问题。 相应的结构称为静定结构。
2.单纯依靠静力平衡方程不能确定全部未知力(支反 力、内力)的问题,称为超静定问题。 相应的结构称为超静定结构。
3
F N3 A3 9F 14 A [ ]
F
[F ]
14 9
14 9
[ ] A
[ ] A
11
[例6-2-4]木制短柱的四角用四个40404的等边角钢 加固,角钢和木材的许用应力分别为[]1=160MPa和 []2=12MPa,弹性模量分别为E1=200GPa 和 E2 =10GPa;求许可载荷P。 解:(1)以压头为研究对象, 设每 个角钢受力为FN1,木柱受力为FN2.
14
B
1
D
C
3 2
(2) 几何方程
l1 ( l 3 ) cos a
FN 3 l 3 E 3 A3
FN1
FN3
a a A
A1 FN2
l3
FN 3l3 E 3 A3
(3)
(4)补充方程:由几何方程和物理方程得:
F N 1l1 E1 A1
2
cos a
(5)联解(1)、(2)、(3)式,得:
FN 1 FN 2 E1 A1 F cos a 2 E1 A1 cos a E 3 A3
第六章
简单的超静定问题
1
第六章
§6-1
§6-2
简单的超静定问题
超静定问题及其解法
拉压超静定问题
§6-3 §6-4
扭转超静定问题 简单超静定梁
2
§6-1
超静定问题及其解法
1.单纯依靠静力平衡方程能够确定全部未知力(支反 力、内力)的问题,称为静定问题。 相应的结构称为静定结构。
2.单纯依靠静力平衡方程不能确定全部未知力(支反 力、内力)的问题,称为超静定问题。 相应的结构称为超静定结构。
3
F N3 A3 9F 14 A [ ]
F
[F ]
14 9
14 9
[ ] A
[ ] A
11
[例6-2-4]木制短柱的四角用四个40404的等边角钢 加固,角钢和木材的许用应力分别为[]1=160MPa和 []2=12MPa,弹性模量分别为E1=200GPa 和 E2 =10GPa;求许可载荷P。 解:(1)以压头为研究对象, 设每 个角钢受力为FN1,木柱受力为FN2.
14
B
1
D
C
3 2
(2) 几何方程
l1 ( l 3 ) cos a
简单超静定梁-PPT精品文档
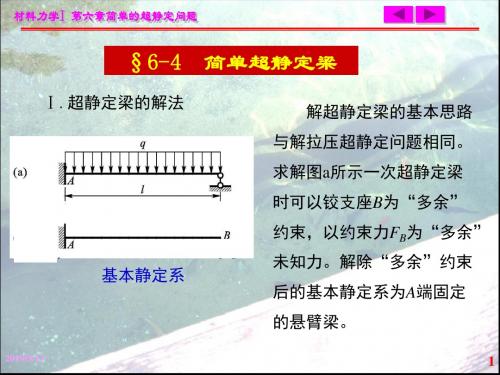
t2>t1,从而产生约束力如图中所示。
(a)
l
由于未知的约束力有6个,而独立的平衡方程只有3
个,故为三次超静定问题。
2019/3/13
15
现将右边的固定端B处的3个约束作为“多余”约束,
则解除“多余”约束后的基本静定系为左端固定的悬臂梁。
(a)
l
(b)
(c)
它在上,下表面有温差的情况下,右端产生转角Bt和挠度
2019/3/13
4
例题1 试求图a所示系统中钢杆AD内的拉力FN。钢梁和 钢杆的材料相同,弹性模量E已知;钢杆的横截面积A和钢
梁横截面对中性轴的惯性矩I 亦为已知。
2019/3/13
5
解: 1. 该系统共有三个未知力(图b)FN ,FB ,FC ,但平面
平行力系仅有两个独立的平衡方程,故为一次超静定问题。
2. 取杆和梁在点A处的连接铰为“多余”约束,相应的
“多
余”未知力为FN。位移(变形)相容条件(参见图b)为wA=DlDA。
2019/3/13
6
3. 物理关系(参见图c,d)为
3 4 F a F l 7 qa N N w w w , D l A Aq AF DA 12 EI EI EA
B B
2019/3/13
11
3. 利用教材中的附录Ⅳ可得物理关系为
20 10 N/m 4 m M 4 m
3 3 B B
24 EI
3 EI
B
30 10 N 3 m 2 m 5 m 2 m M 5 m
需要注意,因DlDA亦即图b中的 A A1是向下的,故上式中wAF 为负的。
简单的超静力问题
简单的超静定问题
20
例题 6-2
2. 取1杆和2杆为AB杆的多余约束,FN1和FN2 为多余未知力。得基本静定系如图c。
F
3
AC
B
(c)
材料力学(Ⅰ)电子教案
简单的超静定问题
21
例题 6-2
3. 由变形图(图d)可得变形相容条件为
E
(d) C Dl1 FN1
Δl1 2Δl3 Δl2 2Δl1
F
A
F
FN3
2E F 1A 1F cNo 2 3 l 1sF N E l1 3 3c A 3o s
于是可求出多余未知力FN3 。
材料力学(Ⅰ)电子教案
简单的超静定问题
例2
y
q
A
C
BxA
l/2
l/2
l
8
B
超静定梁
q
A
l/2
FC
l
基本静定系统
B 补充方程为 5ql4 FCl3 0 38E4 I 48EI
材料力学(Ⅰ)电子教案
简单的超静定问题
1
第 6 章 简单的超静定问题
§6-1 超静定问题及其解法 §6-2 拉压超静定问题 §6-3 扭转超静定问题 §6-4 简单超静定梁
材料力学(Ⅰ)电子教案
简单的超静定问题
2
§6-1 超静定问题及其解法
Ⅰ. 关于超静定问题的概述
(b)
材料力学(Ⅰ)电子教案
简单的超静定问题
mm×30 mm的矩形,钢的弹性
模量E=210 GPa,铜的弹性模
量E3=100 GPa。
材料力学(Ⅰ)电子教案
简单的超静定问题
29
例题 6-3
解:1. 装配后有三个未知的装配内力FN1, FN2 , FN3,如 图d所示。但平行力系只有二个独立的平衡方程,
材料力学教学课件 第六章 简单的超静定问题

FN a EA
2qa 3 A FN 2 3a A I Z
FN a 3 FN a q2a FN 2a 8EI Z 3EI Z 3EI Z EA
4
例题 6.10
当系统的温度升高时,下列结构中的____ A 不会 产生温度应力.
A
B
C
D
例题 6.11
所有超静定结构,都是在静定结构上再加一个或几个约束,这些约束对 于特定的工程要求是必要的,但对于保证结构平衡却是多余的,故称为多余 约束。未知力个数与平衡方程数之差,称为超静定次数。
对超静定问题,可综合运用平衡条件、变形的几何相容条件和力与变形 间的物理关系等三个方面来求解。
6-2.拉压超静定问题
例题:求图 ( a ) 所示等直杆 AB 上下端的约束力,并求 C 截面的位移。 杆的拉压刚度为EA。
解: 1、有两个未知约束力FA , FB (见 图a ) , 但只有一个独立的平衡方程, 故为一次超静定问题。
FA +FB - F = 0
2、取固定端B 为“多余”约束。相应 它应满足相容条件 的静定杆如图 (b)。 ΔBF + ΔBB = 0,参见图(c) (d)。 3、补充方程为
A. 有弯矩,无剪力;
q
B
B. 有剪力,无弯矩;
C. 既有弯矩又有剪力; D. 既无弯矩又无剪力;
A
L2
C
L2
例题 6.13
等直梁受载如图所示.若从截面C截开选取基本结 构,则_____. A
A. 多余约束力为FC,变形协调条件为ωC=0; B. 多余约束力为FC,变形协调条件为θC=0; C. 多余约束力为MC,变形协调条件为ωC=0; D. 多余约束力为MC,变形协调条件为θC=0;
《超静定梁》PPT课件

B
8 Fa 9 - 2021/4/23
FN' wBB2
1F 9 B
wB1 wB2
C
查表得:
wB1
(F
FN 3EI
)a3
C
wB 2
FN (2a)3 3EI
代入上式得:FN
FN
1 9
F
C
弯矩图为:
2
-
Fa 9
21
四、超静定结构(梁)的其它解法及研究现状
将未知问题转化为 已知问题,通过消除已 知问题和原问题的差别, 使未知问题得以解决。
2021/4/23
16
么么么么方面
• Sds绝对是假的
方法二 取支座 A 处阻止梁转动的约束 为多余约束。 代之以与其相应的多余反力偶 MA 得基本静定系。
变形相容条件为:
A 0
2021/4/23
q
B
A l
MA
q
B A
l
基本静定系
18
MAqΒιβλιοθήκη 变形相容条件为: A 0 B
几何方程
A
Aq AMA 0
郑州大学的李会知教授分析了集中荷载或均布荷载作用下 两端固支梁和一次超静定梁的弹塑性加载及变形过程,并 给出了加载各阶段的弯矩和位移计算公式。
中南大学的陈玉骥副教授采用半逆解法,求出了一端固定 一端铰支单跨超静定梁在均布荷载作用下的应力和位移, 并由此说明了材料力学解的精度和适用性。
燕山大学的韩晓娟副教授在三弯矩方程应用中引入刚度系 数和载荷分布系数,使应用这一定理解决工程实际问题时 更简捷、方便和实用.
2021/4/23
9
三 、变形比较法解超静定梁
图示为抗弯刚度为 EI 的一次超静定梁。 变形比较法: (1)将可动铰链支座B
结构力学计算超静定梁结构力学PPT学习教案

条件可用公式表达如下:
Δ1 =0
(a)
第6页/共61页
等式左端表示基本结构在作用点的竖向线位移(沿方向 等式左端表示基本结构在作用点的竖向线位移(沿方向的
位移),等号右端表示原结构在B点的 竖向线 位移。 设、分 别表示基本结构在及荷载单独作用时 ,作用 点沿方 向的位
移,其符号都以沿假定的方向为正, 见图7-4(c)、(d),根 据 叠加原理,变形协调条件式(a)可写为
图7-5
由于虚拟状态的 M 图与 M 1 图相同,故
11
M 1 M ds 1 (1 l l 2 l) l3
EI
EI 2
3
3EI
1P
M 1M P ds EI
1 [1 l (2 l Fl l Pl )]
EI 6 2
2 22
5Fl 3
48EI
(5) 解力法方程。
X1
q
C X1
"基本体系"
在力法中把原超静定结构称 (c) A
为原结构,去掉多余联系后
11
B
C
X1
的静定结构称为基本结构。
q
(d)
所去掉的多余联系,则以相 A
B
C
ip
应的多余未知力X1来代替。
图7-
第5页/共61页
4
这样,基本结构就同时承受着荷载和多余未知力X1的作用, 基本结构在原有荷载和多余未知力X1共同作用下的体系称为 力法的基本体系。现在分析一下如何计算X1 。对原结构讲它 代表B支座反力,是一个被动力,而对基本结构来讲它是一
链杆不是多余约束。
(a)
(b)
(c)
(d)
A
B
A
B X1
Δ1 =0
(a)
第6页/共61页
等式左端表示基本结构在作用点的竖向线位移(沿方向 等式左端表示基本结构在作用点的竖向线位移(沿方向的
位移),等号右端表示原结构在B点的 竖向线 位移。 设、分 别表示基本结构在及荷载单独作用时 ,作用 点沿方 向的位
移,其符号都以沿假定的方向为正, 见图7-4(c)、(d),根 据 叠加原理,变形协调条件式(a)可写为
图7-5
由于虚拟状态的 M 图与 M 1 图相同,故
11
M 1 M ds 1 (1 l l 2 l) l3
EI
EI 2
3
3EI
1P
M 1M P ds EI
1 [1 l (2 l Fl l Pl )]
EI 6 2
2 22
5Fl 3
48EI
(5) 解力法方程。
X1
q
C X1
"基本体系"
在力法中把原超静定结构称 (c) A
为原结构,去掉多余联系后
11
B
C
X1
的静定结构称为基本结构。
q
(d)
所去掉的多余联系,则以相 A
B
C
ip
应的多余未知力X1来代替。
图7-
第5页/共61页
4
这样,基本结构就同时承受着荷载和多余未知力X1的作用, 基本结构在原有荷载和多余未知力X1共同作用下的体系称为 力法的基本体系。现在分析一下如何计算X1 。对原结构讲它 代表B支座反力,是一个被动力,而对基本结构来讲它是一
链杆不是多余约束。
(a)
(b)
(c)
(d)
A
B
A
B X1
材料力学课件-梁的超静定问题
qx3 Rx2 Mx θ= + − =0 6EI 2EI EI
B
R
L− x
R B
D
滚轴
qx2 Rx + −M = 0 6 2
qx2 Rx + −M = 0 6 2 qx2 qx(L − x) 3qLx q(L − x)2 3qL(L − x) + − + − =0 6 2 16 2 8 x2 3Lx 3L(L − x) 2 + x(L − x) − + (L − x) − =0 3 8 4
2 x2 5Lx L − + =0 3 8 4 x 15 ξ 3 2 ξ − + =0 ξ = L 8 4 15 − 33 15− 33 x= L ≈ 0.58L ξ= 16 16
(2) 把滚轴安在AB 间某处, 一球可以放在B 处静 把滚轴安在AB 间某处, 一球可以放在B 止不动.不具体计算,说明滚轴D是更靠近A 止不动.不具体计算,说明滚轴D是更靠近A点还是 更靠近B 画出板挠曲线的示意图.(12分 更靠近B点?画出板挠曲线的示意图.(12分) 更靠近B 更靠近B点 球要放在B 处静止不动. 球要放在B 处静止不动. 点处的转角必须为零. 则B点处的转角必须为零. 滚轴在中点时: 滚轴在中点时: 滚轴在右端时: 滚轴在右端时: 滚轴在靠右端 的某处必有: 的某处必有:
5.刚度 5.刚度
θ (x)
y(x)
max
max
≤ [θ ]
≤ [y]
6.超静定 6.超静定
∆
X
11
+ ∆
1
F
1F
= ∆
= ∆
1
δ
X
+ ∆
本节内容结束
B
R
L− x
R B
D
滚轴
qx2 Rx + −M = 0 6 2
qx2 Rx + −M = 0 6 2 qx2 qx(L − x) 3qLx q(L − x)2 3qL(L − x) + − + − =0 6 2 16 2 8 x2 3Lx 3L(L − x) 2 + x(L − x) − + (L − x) − =0 3 8 4
2 x2 5Lx L − + =0 3 8 4 x 15 ξ 3 2 ξ − + =0 ξ = L 8 4 15 − 33 15− 33 x= L ≈ 0.58L ξ= 16 16
(2) 把滚轴安在AB 间某处, 一球可以放在B 处静 把滚轴安在AB 间某处, 一球可以放在B 止不动.不具体计算,说明滚轴D是更靠近A 止不动.不具体计算,说明滚轴D是更靠近A点还是 更靠近B 画出板挠曲线的示意图.(12分 更靠近B点?画出板挠曲线的示意图.(12分) 更靠近B 更靠近B点 球要放在B 处静止不动. 球要放在B 处静止不动. 点处的转角必须为零. 则B点处的转角必须为零. 滚轴在中点时: 滚轴在中点时: 滚轴在右端时: 滚轴在右端时: 滚轴在靠右端 的某处必有: 的某处必有:
5.刚度 5.刚度
θ (x)
y(x)
max
max
≤ [θ ]
≤ [y]
6.超静定 6.超静定
∆
X
11
+ ∆
1
F
1F
= ∆
= ∆
1
δ
X
+ ∆
本节内容结束
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
静定梁(基本静定基) — 将超静定梁的多余约束解除,得到相应 的静定系统,该系统仅用静力平衡方程就可解出所有反力以 及内力。 多余约束 — 杆系在维持平衡的必要约束外所存在的多余约束
或多余杆件。
L
多余约束的数目=超静定次数
q
B
多余约束的数目=1
静定梁(基本静定基)选取
q
A
B
L
F By
(1)解除B支座的约束,以 F代By 替, 即选择A端固定B端自由的悬臂梁 作为基本静定梁。
F y0, F AF B4q0
FA
FB
F A 4 q F B 4 2 8 0 .7 5 7.2 1 k 5N
FB
MC
M A 0 , M A 4 q 2 4 F B 0
wB2
MA4q24FB
FC
420 248.7512k5N m
确定B 端约束力
F y0, F B F CF0
FCFFB 408.75
q
3、列出变形协调条件。
L A
B
比较原静不定梁和静定基在解除约
束处的变形,根据基本静定梁的一
q
切情况要与原超静定梁完全相同的
A L
B 要求,得到变形协调条件。
F By yB 0
MA
q
A
L
B
A 0
4、用积分法或叠加法求变形,并求出多余未知力。
本例: (1)
仅有q作用,B点挠度为:
ql4 yBq 8EI
因此
仅有F
作用,B点挠度为:
By
yBF
FByl 3 3EI
yB yBFyBq
ql 4 8 EI
F By l 3 3 EI
0
解得:
q
FBy
3 8
ql()
A
l
B
F By
5、根据静力平衡条件在基本静定梁上求出其余的约束反力。
本例: (1)
MA
q
F Ax A
L
F Ay
Fx 0
B
Fy 0
FBy
MA 0
FQmaxql
Mmax
1 2
ql2
例题1: 图示静不定梁,等截面梁AC的抗弯刚度EI,拉杆BD的
抗拉刚度EA,在F力作用下,试求BD杆的拉力和截面C的挠度 。
D
解: 1、选择基本静定梁。
2、列出变形调条件。
A
B
l/2
FN
A
B
l/2
lF
C l/2
F
C l/2
而
wB lBD (1)
wBwBFwBN F
wB1
q44 FB43 8EI 3EI
MC
wB2F 6 E22I342F3 B ' E 43I
FC
代入得补充方程:
q 4 4F B 4 3F 2 23 4 2 F B 4 3
8 EI3 EI 6 EI
3 EI
FB2 346 0412 0 28 044348.75kN
确定A 端约束力
MA
wB1
FA 71.25kN( ) MA125kNm( ) FC 48.75kN( ) MC 115kNm( ) 最后作梁的剪力图和弯矩图
作业:孙训方,《材料力学》(第五版) 6-15 a;6-17
w Bw BF w BN F lBD
例2: 梁AB 和BC 在B 处铰接,A、C 两端固定,梁的抗弯 刚度均为EI,F = 40kN,q = 20kN/m。画梁的剪力图和弯矩图。
解 从B 处拆开,使超静定结构变
成两个悬臂梁。
MA
FA FB
FB FB
wB2
wB1
FB
变形协调方程为: wB1wB2
物理关系
FAx 0,
5 FAy 8ql(),
MA
1 8
ql 2(
)
6、在基本静定梁上按照静定梁的方法求解内力、应力和变形。
MA
F Ax A
L
F Ay
5 ql
8 (+)
5l 8
q B
F By
Fs 图
(-)
3 ql
9 ql 2 8 128
1 ql 2
M 图
8
因此
FQmax
5 8
ql
Mmax
1 8
ql2
q
B L
4.875kN
MA
M C0 , M C2 F 4 F B 0
wB1
FA
FB
F´B
MC 4FB 2F
48.75240115kN.m
MC
wB2
FC
MA
MC
FC FA
71.25
FS ()
kN
8.75 ( )
M
(kN m ) ( ) 125
48.75 1.94
()
17.5 115
A、B 端约束力已求出
F2x
5F3l
wBF6E(I3lx)xl
() 4E 8 I
2
wBFN
FN
(
l )3 2
3EI
()
代入(1):5Fl3 FNl3 FNl
FN
48EI 24EI EA A B
解得:
5F
1
l/2
FN
2
(124
I
)
Al2
3、在基本静定梁上由叠加法求w C 。
在F力单独作用下:
在F N力单独作用下:
第十六讲 简单超静定梁
湖南理工学院——曾纪杰
1、超静定梁的概念
2、用变形比较法解简单超静定梁的基本思想:
(1)解除多余约束,变超静定梁为静定梁;
(2)用静定梁与超静定梁在解除约束处的变形 比较,建立协调方程;
(3)通过协调方程(即补充方程),求出多余 的约束反力。
3、简单超静定梁求解举列。
1、超静定梁的概念
wCF
Fl3 3EI
()
wCNFF 6N E x2(I3lx)x2 l 2 9F E 5 63(lI121A 4I2)l ()
F
C l/2
解得:
wCwCFwCN F
Fl3 [1
25 ]
3EI 32(124 I )
Al2
在本例中,在F力作用下,拉杆BD伸长,因而B处下
移, B处下移的大小应该等于拉杆的伸长量,即
超静梁—未知力的数目多于能列出的独立平衡方程的数目, 仅利用平衡方程不能解出全部未知力,则称为超静定问题(或 静不定问题)。
超静次数=未知力的数目- 独立平衡方程数
q
B L
4个约束反力, 3个平衡方程,
静不定次数=1
2 、用变形比较法解简单超静定梁的基本思想:
(1) 确定超静定次数。 (2) 选择基本静定梁。
MA
(2)解除A端阻止转动的支座反力
q
A
矩 M作A 为多余约束,即选择两端简 B 支的梁作为基本静定梁。
L
基本静定基选取可遵循的原则:
(1) 基本静定基必须能维持静力平衡,且为几何不变系统;
(2) 基本静定基要便于计算,即要有利于建立变形协调条 件。一般来说,求解变形时,悬臂梁最为简单,其次 是简支梁,最后为外伸梁。