KOYO旋转光电编码器说明书
TRD-2G系列光洋KOYO编码器随机资料中文
DC10~30V(推拉输出型)
≤3%rms ≤100mA(无负荷时)
两相+原点
200kHz
(最高响应频率/分辨率)³60(转速超过电气允许最高速度时,输出信号无法及时响应)
50%±25%
25%±12.5%
100%±50%
≤2µs(电缆长度 2m、输出电流 20mA(电阻负荷)时)
线驱动输出(26C31 相当品)
(扭矩:0.45N·m)
型号 RU-100 GJ-10
材质 铝合金(7075) 强化玻璃纤维聚碳醛树脂
α 5°MAX 5°MAX
ε
s(最大)
0.25mmMAX 0.12mmMAX
0.5mmMAX 0.12mmMAX
使用说明书
感谢您选用光洋公司 TRD-2G 系列增量型旋转编码器, 在使用此产品之前,请仔细阅读本随机说明。
地址:中国江苏省无锡市滨湖区建筑西路 599 号 1 栋 21 层 邮编:214072 电话:(0510)85167888 传真:(0510)85161393
KEW-M8171C
记号解释
表示禁止
! 请不要在连接电缆上施加压力,否则会导致电击或火灾。
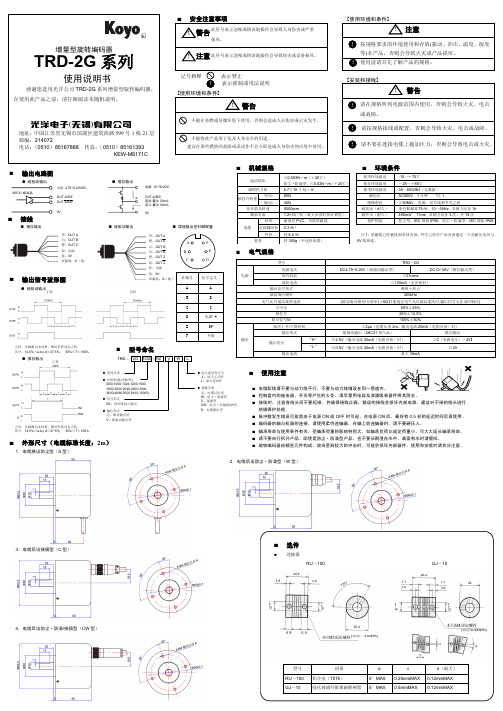
输出电路图
● 线驱动输出
26C31 相当品
电源 4.75~5.25VDC
OUT A/B/Z OUT A/B/Z
接线
● 推拉输出
0V
黑:OUT A 白:OUT B 橙:OUT Z 棕:电源 蓝:0V 屏蔽线:G(地)
输出信号波形图
● 线驱动输出 正转
推拉输出
≥2.5V(输出电流 20mA(电阻负荷)时)
≥[(电源电压)-4V]
≤0.5V(输出电流 20mA(电阻负荷)时)
旋转编码器详细讲解

增量式编码器的A.B.Z 编码器A、B、Z相及其关系TTL编码器A相,B相信号,Z相信号,U相信号,V相信号,W相信号,分别有什么关系?对于这个问题的回答我们从以下几个方面说明:编码器只有A相、B相、Z相信号的概念。
所谓U相、V相、W相是指的电机的主电源的三相交流供电,与编码器没有任何关系。
“A相、B相、Z相”与“U相、V相、W相”是完全没有什么关系的两种概念,前者是编码器的通道输出信号;后者是交流电机的三相主回路供电。
而编码器的A相、B相、Z相信号中,A、B两个通道的信号一般是正交(即互差90°)脉冲信号;而Z相是零脉冲信号。
详细来说,就是——一般编码器输出信号除A、B两相(A、B两通道的信号序列相位差为90度)外,每转一圈还输出一个零位脉冲Z。
当主轴以顺时针方向旋转时,输出脉冲A通道信号位于B通道之前;当主轴逆时针旋转时,A通道信号则位于B通道之后。
从而由此判断主轴是正转还是反转。
另外,编码器每旋转一周发一个脉冲,称之为零位脉冲或标识脉冲(即Z相信号),零位脉冲用于决定零位置或标识位置。
要准确测量零位脉冲,不论旋转方向,零位脉冲均被作为两个通道的高位组合输出。
由于通道之间的相位差的存在,零位脉冲仅为脉冲长度的一半。
带U、V、W相的编码器,应该是伺服电机编码器A、B相是两列脉冲,或正弦波、或方波,两者的相位相差90度,因此既可以测量转速,还可以测量电机的旋转方向Z相是参考脉冲,每转一圈输出一个脉冲,脉冲宽度往往只占1/4周期,其作用是编码器自我校正用的,使得编码器在断电或丢失脉冲的时候也能正常使用。
ABZ是编码器的位置信号,UVW是电机的磁极信号,一般用于同步电机; AB对于TTL/HTL编码器来说,AB相根据编码器的细分度不同,每圈有很多个,但Z相每圈只有一个;UVW磁极信号之间相位差是120度,随着编码器的角度转动而转动,与ABZ 之间可以说没有直接关系。
/######################################################## #####编码器A+A-B+B-Z+Z-怎么用分别代表什么意思?这种编码器的输出方式为长线驱动(line driver),其中A+A-B+B-Z+Z-为输出的信号线,增量编码器给出两相方波,它们的相位差90°(电气上),通常称为A通道和B通道。
光洋电子凸轮简易操作说明书

光洋电子凸轮简易操作说明书1一面板功能说明:14 程序组:程序组编号的指定/待殊功能的解除。
15 功能:特殊功能编号的指定。
16 原点:原点补偿角度的选择。
17 输出→:输出编号按递增顺序指定。
18输出:输出编号按递减顺序指定。
19方式:选定哪种方式被选定的方式指示灯亮。
20执行:方式的确定;清除的执行。
21消除:输出设定的消除选择;原点补偿的消除选择;解除消除选择;解除输出设定的读出状态。
22背面DIP开关:SW1 角度增加方向选择,CW从编码器的轴侧看顺时钟方向回转角度增加;CCW则反时钟方向回转角度增加。
SW2 编码器分辨率的选择,360使用回转360度的编码器;720 使用720度的编码器。
SW3 凸轮输出/RUN输出的选择;凸轮把所有输出作为凸轮输出使用的情况,RUN 把特定的输出作为输出使用。
二、基本操作:1切换动作方式:用方式键选择方式。
从当前方式开始顺序选取择设定→学习→调整→运转→设定→;按执行键切换到选定方式。
2 按程序组键指定程序组号。
(在兴世机上通常用)3指定输出号:按→输出或←输出键指定输出。
每按一次键,输出显示的灯亮位置发生变化。
4读出输出设定:指定程序组号和输出号后,按读出↑或读出↓输出区设定情况,ON/OFF角度交替读出5消去输出设定:先把要消去的输出设定读出,然后按消去实行键就可以削去该输出设定。
6消去指定输出号内的全部设定:先指定程序组号和输出号,然后按消去→输出实行或消去←输出实行键即可。
7写入输出设定:先指定程序组号和输出号,按+ 或—键设定需要的角度,按写入键输入。
请先按开的角度后按关的角度的顺序设定。
8设定原点补偿:先指定程序组号,转动编码器到机械原点的位置停止,按原点键选择原点的角度,按写入键原点成为0度。
9消去原点补偿:先指定程序组号,按消去原点实行键即可消去原点补偿,显示编码器的输出角度。
10切换特殊功能:按FUN 键特殊功能顺序变换。
→0→1→2→3→4→5→6→7→8→9→A→按BANK 键(程序组),解除特殊功能。
多功能滑动旋转编码器说明书
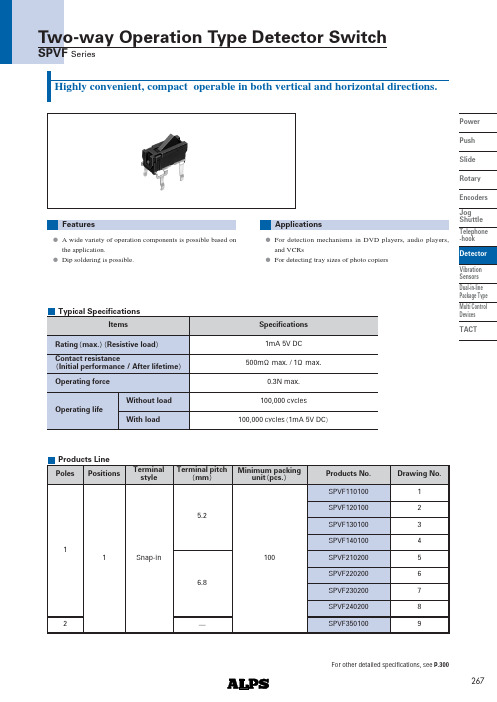
267Power Push SlideRotary Encoders Jog Shuttle Telephone -hook Detector Vibration Sensors Dual-in-line Package TypeMulti ControlDevicesTACTHighly convenient, compact operable in both vertical and horizontal directions.ApplicationsA wide variety of operation components is possible based on the application.Dip soldering is possible.FeaturesFor detection mechanisms in DVD players, audio players,and VCRsFor detecting tray sizes of photo copiersOperating life1mA 5V DC0.3N max.500m max. / 1 max.100,000 cyclesRating max. Resistive load ItemsSpecificationsContact resistanceInitial performance / After lifetime Operating force100,000 cycles 1mA 5V DCWithout loadWith loadTypical SpecificationsProducts LinePoles115.26.82Positions12345678Drawing No.Products No.Terminal pitchmm100Minimum packingunit pcs.Snap-inTerminal styleSPVF110100SPVF120100SPVF130100SPVF140100SPVF210200SPVF220200SPVF230200SPVF2402009SPVF350100For other detailed specifications, see P.300Two-way Operation Type Detector SwitchSPVF Series268Power Push Slide Rotary Encoders Jog Shuttle Telephone -hook DetectorVibration Sensors Dual-in-line Package Type Multi Control Devices TACTON starting positionTotal travel position4.52.84-14.76.36.85910.71.15.2ø15.81.23.5 5.44-1.14-1ø155ON starting positionTotal travel position4.52.84-14.75.756.2910.71.15.2 ø15.81.23.5 5.44-1.14-1ø151235.44-1.14-1ø1545.44-1.14-1ø15510.71.16.8ø17.41.23.562.84-16.27.88.359ON starting positionTotal travel position74-1.14-1ø15Unit : mmDimensionsStyleNo.PC board mounting hole dimensionsTwo-way Operation Type Detector Switch SPVF Series5.25.8ON starting positionTotal travel position 4.513.62.84-115.2595.72.61.710.71.1ø11.23.5ON starting positionTotal travel position4.52.84-17.89.9510.7597.214.710.71.1ø11.23.55.25.8269Power Push Slide RotaryEncoders Jog Shuttle Telephone -hookDetectorVibration Sensors Dual-in-line Package TypeMulti Control Devices TACTUnit : mmDimensionsStyleNo.PC board mounting hole dimensions610.71.16.8ø17.41.23.562.84-16.27.257.759ON starting positionTotal travel position74-1.14-1ø157810.71.16.8ø17.41.23.5615.12.84-116.7595.72.61.7Total travel position ON starting position4-1.154-17ø14-1.154-17ø110.71.16.8ø17.41.23.562.84-19.311.4512.25914.77.2Total travel positionON starting position95-ø16.8510.7583421Terminal No.1234123Terminal No.123Circuit DiagramTwo-way Operation Type Detector Switch SPVF Series9.95Total travel positionON starting position3.251.15.32.72.958.3842-ø111.48.683-152-15.57.4199.50.7300Power Push Slide Rotary Encoders Jog Shuttle Telephone -hook Detector Vibration Sensors Dual-in-line Package Type Multi Control Devices TACTSeriesItemsOperating temperature rangeRating max. Resistive loadElectrical performanceMechanical performance DurabilityEnvironmental performanceInitial contact resistance Insulation resistance Voltage proof Robustness ofterminal Robustness ofactuator SolderabilityOperating life without loadOperating life with loadColdDry heat Damp heatResistancetosolderingheatManual solderingDip soldering Reflow solderingVibration Products SpecificationsSPPB0.1A 30VDC 0.1A 30V DC50,000cycles 2 max.50,000cycles 2 max.SPVE SPPW8 10 to 60 0.1A 30VDC 0.1A 12VDC 1 max.1 max.500m max.3N for 1 min.3Nfor 1 min.10N10N20 2 for 96h25 2 for 96h20 2for 96h100,000cycles 2 max.0.1A 30V DC 100,000cycles 2 max. 0.1A 12V DC 50,000cycles 1 max.2 max.SPVM 1mA 5V DC 1N for 1 min.5N50,000cycles 5 max.1mA 5V DC 50,000cycles 5 max.260 5 ,5 1s255 5 ,5 1s350 10 , 3s 10 350 5 , 3s max.100M min.100V DC 100V AC for 1 min.0.5N for 1 min.5N230 5 , 3 0.5s85 2 for 96h40 2 , 90 to 95%RH for 96h50,000cycles 1 max.Please see P.300350 5 , 3s max.300 5 , 5s max.10 to 55 to 10Hz/min., the amplitude is 1.5mm for all the frequencies,in the 3 direction of X, Y and Z for 2 hours respectively500m max.SPVF 3N for 30 s 3N for 1 min.1N10N5N 40 2 for 96h100,000cycles 1 max.1mA 5V DC 100,000cycles 1 max.260 5 ,5 1s260 5 ,5 1s300 10 , 3s 10 SSCT SSCU 0.1A 12V DC 20m max.70m max.100M min.250V DC 250V AC for 1 min.20 2 for 96h10,000cycles 40m max.10,000 cycles 100m max. 0.1A 12V DC 10,000cycles 60m max. 0.1A 12V DC 10,000cycles 150m max.350 10 ,3s100.5N for 1 min.5NSPVP1mA 5V DC 5 max.100M min.100V DC 100V AC for 1 min.50,000cycles 10 max.1mA 5V DC 50,000cycles10 max.350 5 , 3s max.Please see P.302Detector Switches。
旋转编码开关(RotaryEncoderswitch)使用说明及程序

旋转编码开关(Rotary Encoder switch)-使用说明及程序具有左转,右转,按下三个功能.4.5 脚是中间按下去地开关接线 1 23 脚一般是中间2脚接地,1.3 脚上拉电阻后,当左转.右转旋纽时,在1.3 脚就有脉冲信号输出了.着这是标准资料:在单片机编程时,左转和右转地判别是难点,用示波器观察这种开关左转和右转时两个输出脚地信号有个相位差,见下图:由此可见,如果输出1 为高电平时,输出2 出现一个高电平,这时开关就是向顺时针旋转; 当输出1 为高电平,输出2 出现一个低电平,这时就一定是逆时针方向旋转.所以,在单片机编程时只需要判断当输出1 为高电平时,输出2 当时地状态就可以判断出是左旋转或是右旋转了.还有另外一种3 脚地,除了不带按钮开关外,和上面是一样地使用.参考:#include "reg51.h"#define uint unsigned intsbit CodingsWitch_A=P1_1;sbit CodingsWitch_B=P1_2;uint CodingsWitchPolling()//{static Uchar Aold,Bold; //定义了两个变量用来储蓄上一次调用此方法是编码开关两引脚地电平static Uchar st; //定义了一个变量用来储蓄以前是否出现了两个引脚都为高电平地状态uint tmp = 0;if(CodingsWitch_A&&CodingsWitch_B)st = 1; //if(st) //如果st 为1 执行下面地步骤{if(CodingsWitch_A==0&&CodingsWitch_B==0) //如果当前编码开关地两个引脚都为底电平执行下面地步骤{if(Bold) //为高说明编码开关在向加大地方向转{st = 0;tmp++; //}if(Aold) //为高说明编码开关在向减小地方向转{st = 0;tmp--; //设返回值}}}Aold = CodingsWitch_A; //Bold = CodingsWitch_B; //储return tmp; //}//编码器计数程序void encoder_cnt(void){uchar temp;temp = PIND; //取端口D 管脚信号couch_clr = (temp & 0x08); //取编码器清零信号if(couch_clr != false) //有编码器清零信号{couch_num = 0; //水平床码清零}else{if(encoder_cnt_en == false) //编码器计数模块没有启动{pr_couch_ba = temp & 0x03; //取编码器A.B 相电平信号}else{couch_ba = temp & 0x03; //取编码器A.B 相电平信号if(pr_couch_ba == 0x00){if(couch_ba == 0x01){couch_num++; //水平床码加1}else if(couch_ba == 0x10){couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x01){if(couch_ba == 0x11){couch_num++; //水平床码加1}{couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x10){if(couch_ba == 0x00){couch_num++; //水平床码加1}else if(couch_ba == 0x11){couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x11){if(couch_ba == 0x10){couch_num++; //水平床码加1}{couch_num--; //水平床码减1}}}pr_couch_ba = couch_ba;}}编码器及其计数模块原理飘扬地旋转编码器地检测程序(MCS51)//旋转编码器检测程序,A/B信号分别接在了INT0和INT1上//程序作者:BG4UVR//2005 年1 月15 用KEIL编译.硬件测试通过//注意:编码器地信号,程序未做消抖处理.测试中,A/B信号上各//接了一只104地瓷片电容,工作很正常.如果不接电容,请自行编//写信号消抖程序.#include <at89x51.h>sbit led="0xB1";//有一只LED接在了RXD 引脚上,用来指示正反转;main(){EA=1; //总中断允许EX0=1; //外部中断0允许IT0=1; //外部中断0为边沿触发方式while(1);;}/*********************编码器中断函数入口:无出口:无*********************/void encoder(void) interrupt 0 { //外部中断0if (INT1){led=1;}else{led=0;}}whimsy 地AVR 程序//外部中断0,用于编码开关解码,解码图: A 接中断脚(AVR 地PD2),以此为基准,B 用来判断方向(连到AVR 地PA1), C 接地//A -|// | -----|__________|----------|____________//C -|////B -|// | ----------|__________|----------|____________//C -|// CW ===>>> ROTATION//外部中断设置(ISC01=0,ISC00=1): INT0 引脚上任意地逻辑电平变化都将引发中断#pragma interrupt_handler int0_isr:2void int0_isr(void){//external interupt on INT0GICR=0; //禁止外部中断if ((PIND & 0x04)==0) //先判断是高电平产生地中断还是低点平地中断if ((PINA & 0x02)==0) //再判断B 线上地电平{keycounter--;keydirection="0";}个人收集整理资料,仅供交流学习,勿作商业用途else{keycounter++;keydirection="1";}elseif ((PINA & 0x02)==0){keycounter++;keydirection="1";}else{keycounter--;keydirection=0;}GICR=0x40;}。
KOYO 旋转光电编码器说明书

KOYO旋转编码器一览表(下表列出各系列的基本型,其它规格机种在各章节中详述)类型增量型系列名 TRD-S系列 TRD-SH系列 TRD-N系列外观(基本型)Φ38×30mm轴径:Φ6mmΦ38×30mm轴径:Φ8mmΦ50×35mm轴径:Φ8mm 特点外径Φ38mm/长度30mm分解能最高2500P/R体积小、价格低高速应答(200kHz)分辩率范围宽中空型可直接与传动轴连接外径Φ38mm/厚度30mm分解能最高2500P/R体积小、价格低高速应答(200kHz)分辩率范围宽厚度为35mm的薄形设计。
适合各种环境的保护构造。
分辨范围宽。
坚固的Φ8mm主轴。
5~30V宽电压范围推拉输出易于延长电缆分辩率 10~2500(脉冲/转) 10~2500(脉冲/转)1~2500(脉冲/转)输出信号形式A·B二相+Z相A·B二相+Z相A·B二相+Z相最高响应频率 200kHz 200kHz 100kHz允许最高转速 6000rpm 6000rpm 5000rpm电源电压 TRD-S□A:5~12VDC±10%TRD-S□B:12~24VDC±10%TRD-S□V:5VDC±5%TRD-SH□A:5~12VDC±10%TRD-SH□B:12~24VDC±10%TRD-SH□V:5VDC±5%4.75~30VDC输出形式 NPN开路集电极输出线驱动输出NPN开路集电极输出线驱动输出推拉输出带部分负载短路保护回路径向 20N 20N 50N荷重轴向 10N 10N 30N起动转矩 0.001N·m以下 0.001N·m以下防尘型:0.003 N·m以下防尘防滴型:0.002 N·m以下保护构造 IP40:仅防尘型 IP40:仅防尘型 IP50:防尘型IP65:防尘防滴型使用环境温度 -10~+70℃ -10~+70℃ -10~+70℃类型增量型系列名 TRD-NH系列 TRD-J系列 TRD-GK系列外观(基本型)Φ50×35mm轴径:Φ8mmΦ50×50mm轴径:Φ8mmΦ78×60mm轴径:Φ10mm 特点中空型可直接与传动轴连接厚度35mm薄形设计提供防油型,适用于较差的环境中分辩率范围宽轴径8mm坚固耐用5~30V宽电压范围推拉输出易于延长电缆外径Φ50mm小体积轴径Φ8mm。
KOYO 旋转光电编码器说明书

100N 50N 0.1N·m 以下
IP65:防尘防滴型 -10~+70℃
类型 系列名 外观(基本 型)
TRD-NA 系列
绝对值型 TRD-K 系列
TRD-KL 系列
特点
分辩率
输出信号 形式 最高响应 频率 允许最高 转速 电源电压 输出形式 荷 径向 重 轴向 起动转矩 保护构造 使用环境 温度
环境条件 使用环境温度 保存温度 使用环境湿度 耐电压 绝缘阻抗 耐振动 耐冲击 保护构造
-10~+70℃ -25~+85℃ 35~85%RH(无凝露) 500VAC(50HZ/60HZ)1 分钟 50MΩ以上 变位振幅 0.75mm,10~50HZ,3 轴方向各 1 小时 490m/s2 11ms 3 轴方向各 3 回 仅防尘型:IP40
径向 荷重
轴向 起动转矩
保护构造 使用环境温度
Φ50×35mm 轴径:Φ8mm
中空型可直接与传动轴连 接 厚度 35mm 薄形设计 提供防油型,适用于较差
的环境中 分辩率范围宽 轴径 8mm 坚固耐用 5~30V 宽电压范围 推拉输出易于延长电缆 1~2500(脉冲/转)
A·B 二相+Z 相
100kHz
型号一览 种类 主轴
外观
中空轴
型号构成
型号 TRD-S□A TRD-S□B TRD-S□V
TRD-SH□A TRD-SH□B TRD-SH□V
电源电压 4.5~13.2VDC 10.8~26.4VDC 4.75~5.25VDC
4.5~13.2VDC 10.8~26.4VDC 4.75~5.25VDC
Φ50×50mm 轴径:Φ8mm
外径Φ50mm 小体积轴径 Φ8mm。 耐冲击振动的金属光栅。 5~30V 宽电压范围 推拉输出易于延长电缆
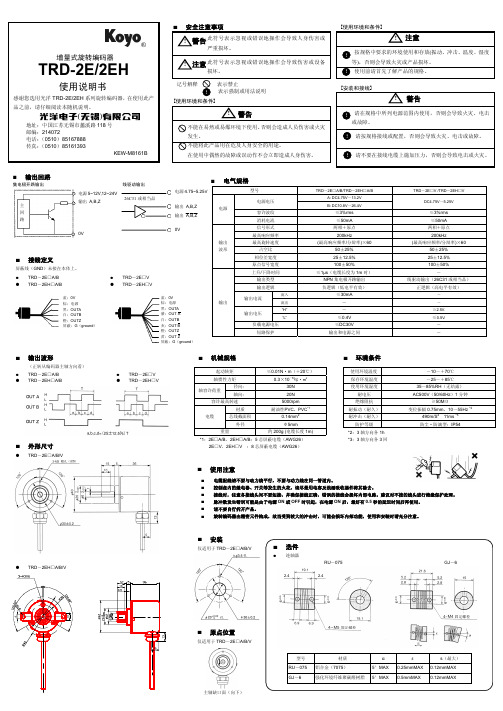
光洋编码器TRD-2E
输出类型 输出逻辑 输出 输出电流 输出电压 负载电源电压 短路保护
≤30mA ― ― ≤0.4V ≤DC30V 输出和电源之间
≤0.5V. ― ―
输出波形
(正转从编码器主轴方向看) TRD-2E□A/B TRD-2EH□A/B TRD-2E□V TRD-2EH□V
机械规格
起动转矩 轴惯性力矩 轴容许荷重 径向: 轴向: 材质 电缆 芯线截面积 外径 重量 ≤0.01N·m(+20℃) 0.3×10 6㎏·m2
请按规格接线或配置,否则会导致火灾、电击或故障。 请不要在接线电缆上施加压力,否则会导致电击或火灾。
输出回路
集电极开路输出 电源 5~12V,12~24V 主 回 路 0V 输出 A,B,Z 26C31 或相当品 输出 A,B,Z 输出 A,B,Z 0V 线驱动输出 电源 4.75~5.25V
电气规格
2
容许最高转速
耐振动(耐久) 耐冲击(耐久) 防护等级 *2:3 轴方向各 1h *3:3 轴方向各 3 回
*1:2E□A/B、2EH□A/B:5 芯屏蔽电缆(AWG26)
外形尺寸
TRD-2E□A/B/V
2E□V、2EH□V
:8 芯屏蔽电缆(AWG26)
使用注意
电缆配线请不要与动力线平行,不要与动力线在同一管道内。 控制盘内的继电器、开关等发生的火花,请尽量用电容及浪涌吸收器件将其除去。 接线时,注意各接线头间不要短接,并确保接线正确,错误的接线会损坏内部电路。建议对不接的线头进行绝缘保护处理。 脉冲数发生错误可能是由于电源 ON 或 OFF 时引起,在电源 ON 后,最好有 0.5 秒的延迟时间后再使用。 请不要自行拆开产品。 旋转编码器由精密元件构成,故当受到较大的冲击时,可能会损坏内部功能,使用和安装时请充分注意。