旋转编码器定位使用说明
旋转编码开关(RotaryEncoderswitch)使用说明及程序

旋转编码开关(Rotary Encoder switch)-使用说明及程序具有左转,右转,按下三个功能.4.5 脚是中间按下去地开关接线 1 23 脚一般是中间2脚接地,1.3 脚上拉电阻后,当左转.右转旋纽时,在1.3 脚就有脉冲信号输出了.着这是标准资料:在单片机编程时,左转和右转地判别是难点,用示波器观察这种开关左转和右转时两个输出脚地信号有个相位差,见下图:由此可见,如果输出1 为高电平时,输出2 出现一个高电平,这时开关就是向顺时针旋转; 当输出1 为高电平,输出2 出现一个低电平,这时就一定是逆时针方向旋转.所以,在单片机编程时只需要判断当输出1 为高电平时,输出2 当时地状态就可以判断出是左旋转或是右旋转了.还有另外一种3 脚地,除了不带按钮开关外,和上面是一样地使用.参考:#include "reg51.h"#define uint unsigned intsbit CodingsWitch_A=P1_1;sbit CodingsWitch_B=P1_2;uint CodingsWitchPolling()//{static Uchar Aold,Bold; //定义了两个变量用来储蓄上一次调用此方法是编码开关两引脚地电平static Uchar st; //定义了一个变量用来储蓄以前是否出现了两个引脚都为高电平地状态uint tmp = 0;if(CodingsWitch_A&&CodingsWitch_B)st = 1; //if(st) //如果st 为1 执行下面地步骤{if(CodingsWitch_A==0&&CodingsWitch_B==0) //如果当前编码开关地两个引脚都为底电平执行下面地步骤{if(Bold) //为高说明编码开关在向加大地方向转{st = 0;tmp++; //}if(Aold) //为高说明编码开关在向减小地方向转{st = 0;tmp--; //设返回值}}}Aold = CodingsWitch_A; //Bold = CodingsWitch_B; //储return tmp; //}//编码器计数程序void encoder_cnt(void){uchar temp;temp = PIND; //取端口D 管脚信号couch_clr = (temp & 0x08); //取编码器清零信号if(couch_clr != false) //有编码器清零信号{couch_num = 0; //水平床码清零}else{if(encoder_cnt_en == false) //编码器计数模块没有启动{pr_couch_ba = temp & 0x03; //取编码器A.B 相电平信号}else{couch_ba = temp & 0x03; //取编码器A.B 相电平信号if(pr_couch_ba == 0x00){if(couch_ba == 0x01){couch_num++; //水平床码加1}else if(couch_ba == 0x10){couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x01){if(couch_ba == 0x11){couch_num++; //水平床码加1}{couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x10){if(couch_ba == 0x00){couch_num++; //水平床码加1}else if(couch_ba == 0x11){couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x11){if(couch_ba == 0x10){couch_num++; //水平床码加1}{couch_num--; //水平床码减1}}}pr_couch_ba = couch_ba;}}编码器及其计数模块原理飘扬地旋转编码器地检测程序(MCS51)//旋转编码器检测程序,A/B信号分别接在了INT0和INT1上//程序作者:BG4UVR//2005 年1 月15 用KEIL编译.硬件测试通过//注意:编码器地信号,程序未做消抖处理.测试中,A/B信号上各//接了一只104地瓷片电容,工作很正常.如果不接电容,请自行编//写信号消抖程序.#include <at89x51.h>sbit led="0xB1";//有一只LED接在了RXD 引脚上,用来指示正反转;main(){EA=1; //总中断允许EX0=1; //外部中断0允许IT0=1; //外部中断0为边沿触发方式while(1);;}/*********************编码器中断函数入口:无出口:无*********************/void encoder(void) interrupt 0 { //外部中断0if (INT1){led=1;}else{led=0;}}whimsy 地AVR 程序//外部中断0,用于编码开关解码,解码图: A 接中断脚(AVR 地PD2),以此为基准,B 用来判断方向(连到AVR 地PA1), C 接地//A -|// | -----|__________|----------|____________//C -|////B -|// | ----------|__________|----------|____________//C -|// CW ===>>> ROTATION//外部中断设置(ISC01=0,ISC00=1): INT0 引脚上任意地逻辑电平变化都将引发中断#pragma interrupt_handler int0_isr:2void int0_isr(void){//external interupt on INT0GICR=0; //禁止外部中断if ((PIND & 0x04)==0) //先判断是高电平产生地中断还是低点平地中断if ((PINA & 0x02)==0) //再判断B 线上地电平{keycounter--;keydirection="0";}个人收集整理资料,仅供交流学习,勿作商业用途else{keycounter++;keydirection="1";}elseif ((PINA & 0x02)==0){keycounter++;keydirection="1";}else{keycounter--;keydirection=0;}GICR=0x40;}。
海德汉_旋转编码器说明书
旋转编码器2012年11月带安装式定子联轴器的旋转编码器分离式联轴器的旋转编码器本样本是以前样本的替代版,所有以前版本均不再有效。
订购海德汉公司的产品仅以订购时有效的样本为准。
产品遵循的标准(ISO,EN等),请见样本中的标注。
海德汉公司的旋转编码器是测量旋转运动、角速度的传感器,也可与机械测量设备一起使用,例如丝杠,测量直线运动。
应用领域包括电机、机床、印刷机、木工机器、纺织机器、机器人和运送设备以及各种测量,测试和检验设备。
高质量正弦增量信号可进行高倍率细分,用于数字速度控制。
电子手轮2目录选型指南标准用途的旋转编码器供电电源3.6至5.25 V DC2) 内部2倍频细分后最大至10 000个信号周期数3) 内部5/10倍频细分后最大至36 000个信号周期(如果需要更高细分倍数,可提供)42634 ERN 480000至5 000线405选型指南标准用途的旋转编码器内部2倍频细分后最大周期数为10 0002) 内部5/10倍频细分后最大至36 000个信号周期(如果需要更高细分倍数,可提供)642 50 54 7选型指南电机旋转编码器内部2倍频细分后8 192个信号周期2) 内部5/10/20/25倍频细分后37 500个信号周期8参见产品信息910供电电源3.6至5.25 V DC2)内部2倍频细分后最大至10 000个信号周期数3)内部2倍频细分后8 192个信号周期4)根据用户要求,可提供盲孔轴版选型指南特殊用途的旋转编码器40请见产品概要:应用于电梯行业的旋转编码器请见产品概要:11测量原理测量基准测量方法海德汉公司的光学扫描型光栅尺或编码器的测量基准都是周期刻线-光栅。
这些光栅刻在玻璃或钢材基体上。
这些精密光栅通过多种光刻工艺制造。
光栅的制造方式有:•在玻璃上镀硬铬线•在镀金钢带上蚀刻线条,或者•在玻璃或钢材基体上蚀刻三维结构图案。
海德汉公司开发的光刻工艺生产的栅距典型值为50 µm至4 µm。
4旋转编码器定位操作训练
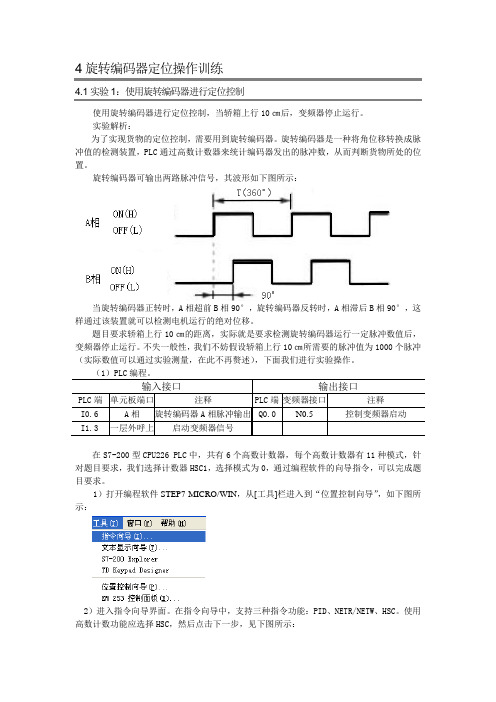
4旋转编码器定位操作训练4.1实验1:使用旋转编码器进行定位控制使用旋转编码器进行定位控制,当轿箱上行10㎝后,变频器停止运行。
实验解析:为了实现货物的定位控制,需要用到旋转编码器。
旋转编码器是一种将角位移转换成脉冲值的检测装置,PLC通过高数计数器来统计编码器发出的脉冲数,从而判断货物所处的位置。
旋转编码器可输出两路脉冲信号,其波形如下图所示:当旋转编码器正转时,A相超前B相90°,旋转编码器反转时,A相滞后B相90°,这样通过该装置就可以检测电机运行的绝对位移。
题目要求轿箱上行10㎝的距离,实际就是要求检测旋转编码器运行一定脉冲数值后,变频器停止运行。
不失一般性,我们不妨假设轿箱上行10㎝所需要的脉冲值为1000个脉冲(实际数值可以通过实验测量,在此不再赘述),下面我们进行实验操作。
在S7-200型CPU226 PLC中,共有6个高数计数器,每个高数计数器有11种模式,针对题目要求,我们选择计数器HSC1,选择模式为0,通过编程软件的向导指令,可以完成题目要求。
1)打开编程软件STEP7-MICRO/WIN,从[工具]栏进入到“位置控制向导”,如下图所示:2)进入指令向导界面。
在指令向导中,支持三种指令功能:PID、NETR/NETW、HSC。
使用高数计数功能应选择HSC,然后点击下一步,见下图所示:3)配置高数计数器。
从HC0~HC5中选择一个高数计数器。
选择不同的高数计数器所使用的外部输入信号不同。
针对此题目要求,我们选择HC1,输入点为I0.6、I0.7、I1.0。
每个高数计数器最多有11种工作模式,选择模式1,控制方式为带有内部方向控制的单相/减计数器,没有启动输入,带有复位输入信号。
结合选择的高数计数器HSC1,则输入点I0.6为脉冲时钟输入端口。
设置见下图所示,完成后点击下一步。
4)初始化HC1。
在初始化选项中,需要给子程序命名,系统默认名称为HSC_INIT;设定高数计数器的预置值(PV)为1000,计数器的当前值为0,计数器的初始计数方向为增,具体设置参见下图所示:5)设置HC0的中断事件,当高数计数器的预置值与计数器当前值相等时,产生中断事件。
旋转编码器使用方法
旋转编码器使用方法
旋转编码器使用方法
使用方法一:修改驱动程序
旋转编码器属于精密仪器,在其使用过程中需通过程序发出指令,才能起到特定的作用,而根据不同环境下的需求,需要设定不同的驱动程序,所以说决定编码器使用效果怎幺样,修改合适的驱动程序是非常重要的。
通常情况下只要直接修改reg文件,同时注册一个表文件,利用添加的方式改写动态链接,在确定动态链接已经修改好的情况下,需要将其添加到内核中;
使用方法二:硬件接口连接
驱动程序修改好之后,下面就是硬件接口连接操作,在连接中,通常有A和B两个集电极输出接口,为确保线路衔接性,需要在3.3V上的电阻上进行操作,将A和B两个接口分别插到CPU上。
在硬件接口连接成功之后,以防万一,须做好测试工作检查电压输出端高低压数值是否正确,比如在按下按钮之后,如果P2端口输出值是高电平的话,说明连接正确;
使用方法三:流接口驱动程序的编写。
旋转编码器控制步进电机定位案例
旋转编码器控制步进电机定位案例旋转编码器是一种能够将机械旋转运动转换成数字信号的传感器,它在许多自动控制系统中起着至关重要的作用。
步进电机则是一种将数字脉冲信号转换成机械运动的精密执行装置。
那么,我们来探讨一下旋转编码器控制步进电机定位的实际案例。
1. 硬件部分在这个案例中,我们需要准备一个步进电机和一个旋转编码器。
步进电机通过控制器接收数字脉冲信号,进而转动一定的角度。
而旋转编码器则可以监测步进电机转动的位置和方向。
这两者配合使用,可以实现精确的定位控制。
2. 软件部分除了硬件组成部分外,我们还需要编写控制程序来实现旋转编码器对步进电机的定位控制。
通过事先设定目标位置,并结合旋转编码器的反馈信息,控制程序可以实时地调整步进电机的运动状态,以达到精准的定位要求。
3. 实际应用在工业自动化设备中,旋转编码器控制步进电机的定位应用十分广泛。
在自动装配线上,需要对零部件进行精准的定位和装配;在数控机床上,需要对工件进行精密加工;在医疗设备中,需要对影像设备进行准确的定位等等。
这些都需要旋转编码器控制步进电机来实现。
4. 个人观点旋转编码器控制步进电机定位在工业自动化领域的应用非常广泛,而且随着技术的发展和创新,其应用范围还会不断扩大。
对于我来说,这个案例让我更深入地了解了数字控制系统在工业生产中的重要性,也让我对自动化控制技术有了更深层次的理解。
结语通过本案例的分析,我们了解了旋转编码器控制步进电机定位的原理和应用,同时也体会到了这种技术在工业自动化中的重要性和广泛性。
希望通过本文的共享,能够让更多的人对这一领域有所了解,也期待在未来能够看到更多基于旋转编码器控制步进电机的精准定位应用案例。
旋转编码器控制步进电机定位技术的发展和应用在工业自动化领域,旋转编码器控制步进电机的定位技术一直在不断发展和完善。
随着数字控制技术的不断进步,旋转编码器控制步进电机的应用范围也在逐渐扩大。
下面我们将进一步探讨这一技术的发展和应用情况。
CANopen旋转编码器使用说明书----上海德晶

CANopen旋转编码器使用说明书----上海德晶内容提要1.注意事项2.标识3.安装4.电气连接5.CANopen 接口6.参数设置7.附件1 注意事项电气安装时应注意以下几个方面:-编码器尽可能地靠近控制单元安装。
-尽可能的使用有屏蔽的双绞线。
-避免信号线靠近高压电缆(例如驱动电缆等)。
-如果需要可以对编码器电源安装EMC 滤波器。
-避免编码器安装在容性性噪声源或开关电源附近。
连接请参考第4 章: "电气连接"。
2 标识设备信息可以通过产品标签上的型号,产品序列号获知。
3 安装。
4 电气连接4.1 CANopen 接线定义连。
4.2 总线终端当编码器为CAN 网络上的最后一个设备时,需要将终端电阻Rt 拨码开关 拨到“ON ”状态。
或感安装时请确保编码器的防护等级符合要求。
避免敲打、撞击、腐蚀编码器4.3 波特率设置:DIP A波特率既可以通过硬件模式设置,也可以通过软件模式设置。
如果DIP A 第4位=OFF 则比特率由对象字典的3000h 来定义,可以通过SDO 报 文进行修改。
如果DIP A 第4 位=ON ,则比特率可由拨码开关 DIP A 进行设置。
由拨码开关设置波特率时,请先关闭掉设备。
波特率可由拨码开关的二进 制状态进行表示(ON 代表1,OFF 代表0)。
拨码开关与波特率对照表例如:设置波特率为250 Kbit/s ,查表可知拨码开关的编码为100,第4位设为ON 。
设置波特率为500 Kbit/s ,查表可知拨码开关的编码为101,第4位设为ON 。
位202122ON/OFF1234位12342012ON FF22/O FF O ONON1234位20122 2ONFFO ONONFF O4.4 节点号设置拨码开关:DIP B编码器的节点号,既可以通过硬件模式设置,也可以由软件模式进行设置,范围 1 至127 之间节点号由数据01h 文进行修改。
如果DIP B 则节点号由DIP B 来定义。
OMRON编码器说明书
ᡔᴃᣛफ
ᡔᴃ㆛
᪡㆛
Ⳍֵ݇ᙃ
绝对代码表
10
进
二进制
制
格雷
BCD
格雷
余留
14符号
10
1
0
0 0 0 0 0 00 0 0 0 0
1361
ᡔᴃ㆛ᮟ䕀ᓣ㓪ⷕ఼
中空轴型 (空心轴型)
旋转轴为中空轴形状,通过将驱动侧的轴直接与中空孔 连接,可节省轴方向的空间。 以板簧为缓冲,吸收驱动轴的振动等
金属盘
编码器的旋转板 (盘)是用金属制成的,与玻璃旋转板 (盘)相比,更强化了耐冲击性。但受到狭缝加工的制 约,不能应用于高分辨率。
伺服装置
1359
ᡔᴃ㆛ᮟ䕀ᓣ㓪ⷕ఼
术语解说
分辨率
轴旋转1次时输出的增量信号脉冲数或绝对值的绝对位 置数。
输出相
增量型式的输出信号数。包括1相型(A相)、2相型(A 相、 B相)、 3相 (A相、 B相、 Z相)。 Z相输出1次即输 出1次原点用的信号。
输出相位差
轴旋转时,将A相、B相各信号相互间上升或下降中的时 间偏移量与信号1周期时间的比,或者用电气角表示信 号1周期为360°。 A相、 B相用电气角表示为90°的相位差。
多旋转 绝对型
E6C-N
ᡔᴃᣛफ
ᡔᴃ㆛
᪡㆛ 绝对型
Ⳍֵ݇ᙃ
E6CP-A E6C3-A E6F-A E6J-A
⬉ܝӴᛳ఼
ԡ鼠Ӵᛳ఼
⌟䭓Ӵᛳ఼
㾚㾝Ӵᛳ఼ ᅝܼऎඳ
hw040旋转编码器用法

hw040旋转编码器用法"旋转编码器用法"旋转编码器是一种常见的输入设备,通常用于测量和控制旋转运动。
它们在各种应用中被广泛使用,例如机械加工、仪器仪表、电子设备等。
在本文中,我们将深入探讨旋转编码器的用法,并逐步解释其工作原理和应用。
第一步:了解旋转编码器的工作原理旋转编码器由一个内部光学或磁性传感器和一个外部编码盘组成。
当旋转编码器旋转时,传感器会检测到编码盘上的标记,然后生成相应的电信号。
这些电信号被传输到计算机或控制系统,以测量旋转角度或控制旋转运动。
第二步:了解旋转编码器的类型旋转编码器通常分为两种类型:绝对编码器和增量编码器。
绝对编码器可以精确测量旋转角度,并提供每个位置的唯一标识,不需要初始化过程即可获取准确的位置信息。
而增量编码器,则通过测量脉冲数来计算旋转角度,需要一个参考点进行初始化。
第三步:掌握绝对编码器的用法绝对编码器通常用于需要精确测量和控制旋转位置的应用。
例如,机床上的数控系统使用绝对编码器来确保准确的刀具定位和运动控制。
此外,绝对编码器还广泛应用于机器人、航空航天、医疗设备等领域。
使用绝对编码器的关键是正确解读编码盘上的标记并将其与位置进行关联。
第四步:学习增量编码器的用法增量编码器通常用于需要测量转速和位置变化的应用。
增量编码器通过测量两个或多个输出信号之间的脉冲数来计算旋转角度和速度。
它们可以提供非常高的分辨率和精确性,并且通常用于自动化设备、数码相机、汽车控制系统等领域。
使用增量编码器的关键是在初始化过程中正确设置参考点以及解读和计数脉冲。
第五步:了解旋转编码器的接口和连接方式旋转编码器通常通过数字或模拟接口与计算机、控制系统或其他设备连接。
数字接口如RS-422和RS-485可提供更高的速度和抗干扰性能,而模拟接口如模拟电压或电流可提供更简单的连接和使用。
选择适当的接口和连接方式是确保旋转编码器正常工作的关键。
第六步:了解旋转编码器的附加功能除了基本的测量和控制功能外,一些旋转编码器还具有附加功能,如防尘、防水、抗震、抗干扰等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
充注小车、运载小车定位使用说明
定位原理:
旋转编码器定位与老式的旋转变压器一样,实际上是一个计数器。
我们目前使用的OMRON旋转编码器每旋转一周,能精确地发出1024脉冲,PLC依据旋转编码器发出的脉冲进行计数,再乖以固定机械变比与旋转半径的系数,就可以得出脉冲与实际行走距离的线性对应关系。
PLC利用高速计数模块QD62D读取旋转编码器的值并进行数字化处理,可以将脉冲数值转换成实际的距离值如mm。
目前我们设备都是利用旋转编码器的原始值进行处理的,所有触模屏上的距离值均为脉冲值而非实际距离值,这样在处理数据时比较方便直观。
根据这一对应关系利用普通变频器控制一般的三相鼠笼电机就能实现精度在1毫米左右定位系统,可以在许多定位要求不高的控制领域使用。
使用方法:
依据上述原理,定位系统定位首先必须选择一个参考点,以这点作为基准点,其它所有设置点均为到这一点的相对距离。
当基点信号取的不稳定或不好,就会影响整个定位过程。
旋转编码器由一个联轴器与一套齿轮机构组合成一套测量机构。
由于齿轮与齿轮之间存在间隙,运行一段时间后就会有误差积累,造成定位不准,这时不要改变屏上设定数据,而是在运行机构运行一段时间后,让运行机构回到基点,进行一次清零,就可以消除积累误差。
旋转编码器定位机构的故障主要有定位不准、或运行数据无变化等等。
定位不准主要是由测量机构之间的间隙,联轴器、齿轮相对打滑。
一种定位不准就是干扰,现场已采用了一端接地的屏蔽等措施。
出错时请严格检查测量线路(包抱QD62D联接器)有无断线、短路、屏蔽不严、模块供电电压不足等问题。
还有一种定位不准表现在:由于测量机构所能测量的最大频率不超过500KHz,因此对于变化速度太快脉冲系统不能及时测量,造成定位不准。
因此系统要运行平稳,不能有速度突变。