ENVI监督分类与非监督分类
基于envi的地物分类

一、非监督分类
仅凭遥感影像地物的光谱特征的分布规律,即自然聚类性, 迚行“盲目”的分类;其类别的属性是通过分类结束后目 视判读或实地调查确定的。
1.K-均值聚类法 2.IsoData聚类算法
1.K-均值聚类法
K-均值算法的聚类准则是使每一聚类中,多模式点 到该类别的中心的距离的平方和最小。 基本思想是:通过迭代,逐次移动各类的中心,直 至得到最好的聚类结果为止。
分类后处理
1.合并:在主菜单中Classification—post classification—Sieve Classes
• 2.生成混淆矩阵:主 菜单中, Classification—post classification— confusion Matrix— Using Ground Truth ROIS.将所有类别都选 上。
参数值<1.8需重新选择,>1.9说明样本之 间分离性好
6.Roitools对话框中单击saveRois保存
7.选取的训练区保存以后,迚行分类。主菜 单—Classification—supervised-------maximum likelihood(最大似然法)
在弹出的对话框中选待分类的图像:
保存混淆矩阵
在分类中遇到的问题:
1. 类别数的确定:目视判读?经验指导? 2. 样本训练区的选择:有代表性的多训练区选取,如丌同的植 被区域选取. 3. 训练样本间的可区分度指标(这一点在erdas实习中没有 涉及,在实习中,七类分别为长江、汉江、湖泊、水田等, 但在envi的样点选取中这些类别之间的可区分度均小于 1.8,意味着这些类别之间丌可区分需要迚行删除或者合 并,因此涉及到了类别数的确定问题和分类精度问题以 及分类的精确度问题) 4. 两类的边界线上的样点分类的丌确定性
实验四遥感图像的监督分类和非监督分类

实验四遥感图像的监督分类和⾮监督分类实验四遥感图像的⾮监督分类与监督分类⼀、实验⽬的1.⾮监督分类是对数据集中的像元依据统计数字,光谱类似度和光谱距离进⾏分类,在没有⽤户定义的条件下练习使⽤,在ENVI环境下的⾮监督分类技术有两种:迭代⾃组织数据分析技术(ISodata)和K均值算法(K-Means);2.分类过程中应注意:1)怎样确定⼀个最优的波段组合,从⽽达到最佳的分类精度,基于OIF和相关系数,协⽅差矩阵以及经验的使⽤来完成对最适合的组合的选取,分类效果的关键即在于此;2)K-Means的基本原理;3)Isodata的基本原理;4)分类结束后,被分类后的图像是⼀个新的图像,被分类类码秘填充,从⽽可以获得数据提取信息,统计不同类码数量,转化为实际⾯积,在得到后的图像上,可对不同⽬标的形态指标进⾏分析。
3.对训练区中的像元进⾏分类;4.⽤训练数据集估计查看监督分类后的统计参数;5.⽤不同⽅法进⾏监督分类,如最⼩距离法、马⽒距离法和最⼤似然法。
⼆、实验设备与材料1、软件ENVI 4.7软件2、所需材料TM数据三、实验步骤1.选择最优的波段组合ENVI主⼯具栏中File →Open image file →选择hbtmref.img打开→在Basic Tools中选择Statistics →Compute statistics选定原图,在Spectral subset中可选项全部选定→OK →OK →全选→保存→OK,则各类统计数字均可查;OIF计算,选择分类波段:1,2;2,3;1,3波段标准差分别为2.665727;3.473308;4.574609,和为10.713644。
Correlation Matrix 中1和2波段的相关系数0.964308,加上2和3波段的相关系数0.980166,再加上1和3波段的相关系数0.945880,最终等于2.890354。
⽤标准差相加的结果10.713644⽐上相关系数之和2.890354等于3.70668922。
envi7-监督与非监督分类
第二步: 第二步:样本选择
打开分类图像, Display->Overlay打开分类图像,在Display->Overlay->Region of Interest,默认ROIs为多边形, ROIs为多边形 Interest,默认ROIs为多边形,按照默认设置在影像上 定义训练样本。如下图所示, 定义训练样本。如下图所示,设置好颜色和类别名称 支持中文名称)。 (支持中文名称)。
3.2 监督分类——练习
3.2 监督分类——练习
ROIs面板中 选择Option 面板中, Option1. 在ROIs面板中,选择Option->Compute ROI Separability,计算样本的可分离性 计算样本的可分离性。 Separability,计算样本的可分离性。如下 图所示,表示各个样本类型之间的可分离性, 图所示,表示各个样本类型之间的可分离性, Jeffries用Jeffries-Matusita, Transformed Divergence参数表示 参数表示, Divergence参数表示,这两个参数的值在 0~2.0之间 大于1.9 之间, 1.9说明样本之间可分离性 0~2.0之间,大于1.9说明样本之间可分离性 属于合格样本;小于1.8 1.8, 好,属于合格样本;小于1.8,需要重新选 择样本;小于1 择样本;小于1,考虑将两类样本合成一类 样本。 样本。
遥感图像处理遥感图像处理-11
北京大学深圳研究生院
3.影像信息基本提取方法 3.影像信息基本提取方法
•3.1 3.1 •3.2 3.2 •3.3 3.3 •3.4 3.4 影像信息提取技术概述 影像增强处理 监督分类 非监督分类
3.1 影像信息提取技术概述
遥感影像通过亮度值或像元值的高低差异 反映地物的光谱信息)及空间变化( (反映地物的光谱信息)及空间变化(反映 地物的空间信息)来表示不同地物的差异, 地物的空间信息)来表示不同地物的差异, 这是区分不同影像地物的物理基础。 这是区分不同影像地物的物理基础。 遥感影像分类就是利用计算机通过对遥感影 像中各类地物的光谱信息和空间信息进行分 选择特征, 析,选择特征,将图像中每个像元按照某种 规则或算法划分为不同的类别, 规则或算法划分为不同的类别,然后获得遥 感影像中与实际地物的对应信息, 感影像中与实际地物的对应信息,从而实现 遥感影像的分类。 遥感影像的分类。
(完整word版)ENVI监督分类与非监督分类
对照原影像将30种类型进行编号并改名字,改变颜色;进行相同类别的合并:选择Classification中的分类后处理post classification,选择合并同类别Combine Classes,选择之前的非监督分类影像,在输入的文件中依次选择要合并的类,在输出的文件中选择相同的类别,点击Add Combination,所有的类别合并完后点击确定即可。
结果与分析1、各个样本之间的可分离性.说明哪些地物类型之间较易区分,哪些类型之间难以区分。
Jeffries-Matusita(J—M距离):水稻田水浇地河流居民地草地林地工业区裸地水稻田1。
99982。
00002.00002。
00001.95252.00002。
0000水浇1。
99982.00002。
00001.94941。
98902。
00002.0000Band0。
85 0。
90 0。
88 0.93 1.00 0.97 5Band0.90 0.93 0。
92 0。
92 0。
97 1。
00 63、最大似然法进行监督分类结果:原影像最大似然法进行监督分类结果监督分类的最大似然法分类结果中,主要的地物都可以被区分出来,地物分工业区94.7494.7418/1918/19裸地100.00100。
0042/4242/425、Clump Classes和Sieve classes结果:Clump Classes3*3处理结果:Clump Classes5*5处理结果:在聚类统计的结果上很容易看出原本监督分类的生成结果中严重的椒盐现象消失了,地物类型都相对完整,但有些细节已经被消除看不清楚,3*3窗口与5*5窗口生成的结果区别就在于3*3窗口的细节较5*5窗口的更加清楚具体, 5*5窗口将周边的面积较小的地物完全合并在一起.Sieve classes结果(Number of Neighbors设为8):Sieve classes结果(Number of Neighbors设为4):对影像的过滤分析生成的结果显得椒盐现象更加严重,结果影像上出现了很多小黑点,Number of Neighbors的值设置的越小,小黑点越密集,但是经过过滤分析的影像”孤岛”现象都已经消失。
监督与非监督ENVI及ERDAS操作步骤

非监督分类1、在ERDAS中裁剪出一部分的区域进行分类,利用AOI工具进行裁剪,另存裁剪的区域。
2、在ENVI中打开裁剪的区域dsb.img在Basic Tool菜单下Region of Interest工具打开ROI Tool新建类别名,由于裁剪的区域没有森林,所以共分五类:水体、耕地、城市、裸地、草地。
分别给予不同颜色。
3、在Zoom 窗口中进行采样即采集训练区。
采样前先判读熟悉影像,在采集样本时注意:采取训练区内颜色越纯越好。
4、采集完训练区后在Classification 菜单下选择Supervised ,利用Maximun Likelihood (最大似然法)进行非监督分类。
5、在分类中遇到的问题①进行第一次分类的结果是城市中的道路被归为了水体, 改进办法:更改城市的训练区样本,对城市的采样除了取建筑物的样本还应在城市的街道处采取几个样点,然后再进行第二次分类。
②第二次分类的结果是部分休耕(收割后)的耕地归为了城新建类别名市区域。
因为该影像是2000年9月14日的影像,故部分耕地已收割休耕,在原图上表现为规则的深紫色,我将其归为耕地。
改进方法:增加耕地的训练区的样本,在颜色为深紫色的的区域采取几个样本点作为耕地的训练区。
③第三次分类的结果是发现河流两岸的落地被归为了城市改进方法:增加裸地的训练区样本。
在河流两岸处选取几个样本做为裸地训练区。
第一次分类的结果:其中:水体耕地城市草地裸地第二次分类结果:其中:水体耕地城市草地裸地第三次分类结果:其中:水体耕地城市草地裸地。
监督分类和非监督分类
影像的分类可分为监督与非监督分类。
监督分类器根据其原理有基于传统统计分析的、基于神经网络的、基于模式识别的等。
本专题以ENVI的监督与非监督分类的实际操作为例,介绍这两种分类方法。
有以下内容组成:∙ ∙ ●非监督分类∙ ∙ ●监督分类∙ ∙ ●分类后处理非监督分类非监督分类:也称为聚类分析或点群分类。
在多光谱图像中搜寻、定义其自然相似光谱集群的过程。
它不必对影像地物获取先验知识,仅依靠影像上不同类地物光谱(或纹理) 信息进行特征提取,再统计特征的差别来达到分类的目的,最后对已分出的各个类别的实际属性进行确认。
目前比较常见也较为成熟的是ISODATA、K-Mean和链状方法等。
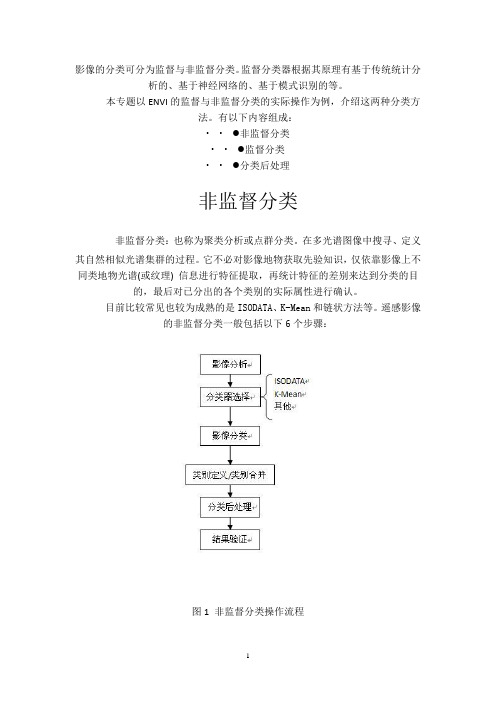
遥感影像的非监督分类一般包括以下6个步骤:图1 非监督分类操作流程1、影像分析大体上判断主要地物的类别数量。
一般监督分类设置分类数目比最终分类数量要多2-3倍为宜,这样有助于提高分类精度。
本案例的数据源为ENVI自带的Landsat tm5数据Can_tmr.img,类别分为:林地、草地/灌木、耕地、裸地、沙地、其他六类。
确定在非监督分类中的类别数为15。
2、分类器选择目前非监督分类器比较常用的是ISODATA、K-Mean和链状方法。
ENVI包括了ISODATA和K-Mean方法。
ISODATA(Iterative Self-Orgnizing Data Analysize Technique)重复自组织数据分析技术,计算数据空间中均匀分布的类均值,然后用最小距离技术将剩余像元进行迭代聚合,每次迭代都重新计算均值,且根据所得的新均值,对像元进行再分类。
K-Means使用了聚类分析方法,随机地查找聚类簇的聚类相似度相近,即中心位置,是利用各聚类中对象的均值所获得一个“中心对象”(引力中心)来进行计算的,然后迭代地重新配置他们,完成分类过程。
3、影像分类打开ENVI,选择主菜单->Classification->Unsupervised->IsoData或者K-Means。
实习三 遥感图像的监督分类与非监督分类

实验三遥感图像的监督分类与非监督分类[实验目的]1.理解遥感图像的监督分的含义;2.会使用ENVI软件对遥感图像进行监督分类。
[实验原理]在遥感图像分类中,按照是否有已知训练样本的分类依据,分类方法又分为两大类:监督分类与非监督分类。
遥感图像的监督分类是在已知类别的训练场地上提取各类别训练样本,通过选择特征变量、确定判别函数或判别式(判别规则),进而把图像中的各个像元点划归到各个给定类的分类。
遥感图像的非监督分类是在没有先验知识(训练场地)的情况下,根据图像本身的统计特征及自然点群的分布情况来划分地物类别的分类处理,事后再对已分出的各类的地物属性进行确认,也称作“边学习边分类法”。
两者的最大区别在于,监督分类首先给定类别,而非监督分类则由图像数据本身的统计特征来决定。
[实验步骤]一监督分类(数据采用njtmcorrected)监督分类技术需要在执行以前事先定义训练分类器(training classes), 训练分类器也可以用ENVI 感兴趣区(ROI)函数限定。
ENVI的监督分类技术包括平行六面体(平行管道)、最小距离、马氏距离、最大似然、波谱角度制图仪以及二进制编码方法1. “开始”->“程序”->RSI ENVI4.0->ENVI,打开ENVI4.0界面;2. 选择File > Open Image File.3. 当出现Enter Data Filename 对话框,选择要打开的文件名,再点击“OK”,在Available Bands List框里点击Load Band ,图像显示在图像显示窗口。
4. 选择“基本工具”->感兴趣区->ROI工具,弹出ROI Tool对话框。
5. 在ROI_Type菜单里选择建立感兴趣区的类型,可以选择Polygon、Polyline、point、Rectangle、Ellipse等类型。
6. 在Window栏里选择要建立感兴趣区的窗口,可以选择Image、Scroll、Zoom窗口。
ENVI图像分类实验
3、分类精度评价
实验数据:
融合后的SPOT5影像(SPOT5_FusionImage)及其对应的DEM数据,影像和DEM经过了精确配准。其中,融合后的SPOT5影像有3个波段,R、G、B分别对应NIR(近红外)、R(红波段)、G(绿波段)。
实验方法与步骤:
一、
监督分类:又称训练分类法,用样本像元去识别其他未知类别像元的过程。
在图像窗口上画出感兴趣区,单击鼠标右键确定选择形状(此时可以拖动感兴趣区域,用Ctrl+鼠标左键可以删除。单击滑轮键是取消操作。),再次单击右键确定此训练区(此时若要删除训练区,需要点击ROI Tool窗口中的Delete控键,此操作将删除所有该类型的感兴趣区域)。
ROI Tool窗口中将会显示选择区域的颜色和相关信息,其中,感兴趣区域名称(ROI Name)和色彩可以修改。可就某一类训练区选择多个感兴趣区域。
(2).选择要进行分类的影像(SPOT5_FusionImage)。
(3).设置分类参数,选择训练样本(Select All Items):
图12
Data scale factor:数据比例系数。这个比例系数是一个比值系数,用于将整型反射率或辐射率数据转化为浮点型数据。例如:如果反射率数据在范围0-10000之间缩放,则设定的比例系数就为10000。对于没有定标的整型数据,将比例系数设为该仪器所能测量的最大值2n-1,n为仪器的bit容量,例如:对于8-bit仪器,设定的比例系数为255,对于10-bit仪器(如NOAA 12 AVHRR),设定的比例系数为1023,对于11-bit仪器(如IKONOS),设定的比例系数为2047。
实验三
实验目的:
通过上机操作,了解遥感图像分类的几种常用的分类方法与过程,熟悉ENVI软件中图像分类的方法与分类后处理的过程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
选择classification/unsupervised/Isodata,选择子区为输入文件,,点击OK,设置参数如下图所示。
对照原影像将30种类型进行编号并改名字,改变颜色;进行相同类别的合并:选择Classification中的分类后处理post classification,选择合并同类别Combine Classes,选择之前的非监督分类影像,在输入的文件中依次选择要合并的类,在输出的文件中选择相同的类别,点击Add Combination,所有的类别合并完后点击确定即可。
原影像
最大似然法进行监督分类结果
监督分类的最大似然法分类结果中,主要的地物都可以被区分出来,地物分布也很清楚的展现出来,只是生成的结果又很严重的椒盐现象,分析可能是选取训练区时认为造成了误差。
缺点就是没有将结果中的颜色按照真实地物的颜色进行修改,下次
在聚类统计的结果上很容易看出原本监督分类的生成结果中严重的椒盐现象消失
但有些细节已经被消除看不清楚,3*3窗口与5*5窗口生成的
5*5窗口的更加清楚具体, 5*5窗口将周边的面积较
对影像的过滤分析生成的结果显得椒盐现象更加严重Number of Neighbors的值设置的越小,小黑点越密集
象都已经消失.
主要成分分析得到的结果较好,椒盐现象得到避免邻地物之间的合并,分析窗口越小,地物信息更加具体次要分析(kernal size为3*3):
利用次要成分分析的影像不但没有减轻椒盐现象,反而椒盐现象更加严重,未定义的黑点更密集,并且变得更大,效果很不好.
7、非监督分类结果:
在进行非监督分类的时候首先将地物分成了30类,然后人工进行识别分类后最终与监督分类结果一样合并成了8类,但是最后的效果并不是很好,在非监督分类一开始就将水稻田与林地分类到一起,最后生成的结果只能区分大致的地物分布,与监督分类结果相比,非监督分类结果更粗糙.。