计算机控制系统课程设计--超前滞后矫正控制器设计
【自动控制原理课程设计】控制系统的超前校正设计
目录1 超前校正的原理及方法 (2)1.1 何谓校正为何校正 (2)1.2 超前校正的原理及方法 (3)1.2.1 超前校正的原理 (3)1.2.2 超前校正的应用方法 (4)2 控制系统的超前校正设计 (5)2.1 初始状态的分析 (5)2.2 超前校正分析及计算 (8)2.2.1 校正装置参数的选择和计算 (8)2.2.2 校正后的验证 (10)2.2.3 校正对系统性能改变的分析 (14)3 心得体会 (16)参考文献 (17)控制系统的超前校正设计1 超前校正的原理及方法1.1 何谓校正 为何校正所谓校正,就是在系统中加入一些其参数可以根据需要而改变的机构或装置,是系统整个特性发生变化。
校正的目的是为了在调整发大器增益后仍然不能全面满足设计要求的性能指标的情况下,通过加入的校正装置,是系统性能全面满足设计要求。
1.2 超前校正的原理及方法1.2.1 超前校正的原理无源超前网络的电路如图1所示。
图1 无源超前网络电路图如果输入信号源的内阻为了零,且输出端的负载阻抗为无穷大,则超前网络的传递函数可写为1R1()1c aTsaG s Ts+=+ (2-1) 式中1221R R a R +=> , 1212R RT C R R =+ 通常a 为分度系数,T 叫时间常数,由式(2-1)可知,采用无源超前网络进行串联校正时,整个系统的开环增益要下降a 倍,因此需要提高放大器增益交易补偿。
根据式(2-1),可以得无源超前网络()c aG s 的对数频率特性,超前网络对频率在1/aT 至1/T 之间的输入信号有明显的微分作用,在该频率范围内,输出信号相角比输入信号相角超前,超前网络的名称由此而得。
在最大超前交频率m ω处,具有最大超前角m ϕ。
超前网路(2-1)的相角为()c arctgaT arctgT ϕωωω=- (2-2) 将上式对ω求导并令其为零,得最大超前角频率m ω(2-3) 将上式代入(2-2),得最大超前角频率(2-4) 同时还易知 ''m c ωω=ϕm 仅与衰减因子a 有关。
自动控制原理课程设计 超前校正

自动控制原理课程设计一. 设计题目1.掌握控制系统的设计与校正方法、步骤。
2.掌握对控制系统的相角裕度、稳态误差、截止频率和动态性能分析。
3.掌握利用matlab 对控制理论内容进行分析。
4.提高大家分析问题解决问题的能力。
二. 题目任务及要求题目1:已知单位负反馈系统被控制对象的开环传递函数()()10+=s s K s G 用串联校正的频率域方法对系统进行串联校正设计。
任务:用串联校正的频率域方法对系统进行串联校正设计,使系统满足如下动态及静态性能指标:(1)在单位斜坡信号作用下,系统的稳态误差rad e ss 151<; (2)系统校正后,相位裕量 45≥γ。
(3)截止频率s rad c /5.7≥ω。
设单位负反馈系统的开环传递函数为)1()(+=s s K s G用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态性能:(1) 相角裕度045≥γ;(2) 在单位斜坡输入下的稳态误差为1.0=sse ; (3) 系统的剪切频率wc <4.4rad/s 。
(4)模值余度h ≥10dBk=10;num1=[1];den1=conv([1 0],[1 1]); sys1=tf(k*num1,den1); figure(1);Margin(sys1);hold onfigure(2);sys=feedback(sys1,1) step(sys)Transfer function:10-------s^2 + s未校正前的Bode图未校正前的的阶跃响应曲线由图可以看出未经校正的Bode图及其性能指标,还有如图(-2)所示的未校正的系统的阶跃响应曲线。
由图(-1)可以看出系统的:模值稳定余度; h=∞dB; -pi穿越频率:Wg=∞dB;相角稳定余度为γ=180剪切频率:Wc=3.08rad/s;由图(-1)可以知道,系统校正前,相角稳定余度=18<45。
为满足要求,开环系剪切频率wc=3.08rad/s<4.4rad/s。
超前滞后校正课程设计
超前滞后校正课程设计一、课程目标知识目标:1. 学生能够理解并掌握“超前滞后校正”的概念,了解其在控制系统中的应用。
2. 学生能够描述超前滞后校正对系统性能的影响,如稳定性、快速性和平稳性。
3. 学生能够运用数学工具分析超前滞后校正的设计方法和参数调整。
技能目标:1. 学生能够运用模拟软件进行超前滞后校正的设计和仿真。
2. 学生能够通过小组合作,解决与超前滞后校正相关的问题,并提出优化方案。
3. 学生能够运用图表、数据和文字,清晰、准确地表达校正前后的系统性能变化。
情感态度价值观目标:1. 学生能够认识到学习自动控制原理在实际生活和工业中的重要性,增强学习兴趣。
2. 学生能够培养团队协作精神,学会倾听他人意见,尊重他人观点。
3. 学生能够树立正确的科学态度,勇于面对挑战,善于从失败中汲取教训,不断提高自身能力。
课程性质分析:本课程为自动控制原理的相关内容,通过讲解超前滞后校正,使学生了解控制系统性能优化的方法。
学生特点分析:学生具备一定的数学基础和控制理论基础知识,具有较强的逻辑思维能力和动手能力。
教学要求:1. 结合实际案例,激发学生学习兴趣,注重理论与实践相结合。
2. 通过小组讨论、实验操作等形式,培养学生团队协作能力和实际操作能力。
3. 注重过程评价,关注学生在学习过程中的表现,及时给予指导和鼓励。
二、教学内容本课程教学内容主要包括以下三个方面:1. 理论知识:- 控制系统稳定性分析:回顾控制系统稳定性判据,如劳斯-赫尔维茨准则。
- 超前滞后校正原理:讲解超前滞后校正的概念、作用和分类。
- 校正参数设计:介绍超前滞后校正参数的设计方法,如根轨迹法、波特图法等。
2. 实践操作:- 软件仿真:使用MATLAB等软件,进行超前滞后校正的设计与仿真。
- 实验分析:通过实验设备,观察校正前后控制系统性能的变化,如阶跃响应、冲击响应等。
3. 教学案例:- 分析实际工业控制系统中应用超前滞后校正的案例,如电机转速控制、温度控制等。
自动控制原理MATLAB课程设计--滞后-超前校正
滞后-超前校正——课程设计一、设计目的:1. 了解控制系统设计的一般方法、步骤。
2. 掌握对系统进行稳定性的分析、稳态误差分析以及动态特性分析的方法。
3. 掌握利用MATLAB 对控制理论内容进行分析和研究的技能。
4. 提高分析问题解决问题的能力。
二、设计内容与要求:设计内容:1. 阅读有关资料。
2. 对系统进行稳定性分析、稳态误差分析以及动态特性分析。
3. 绘制根轨迹图、Bode 图、Nyquist 图。
4. 设计校正系统,满足工作要求。
设计条件:1、被控制对象的传递函数是m m 1m 2012mn sn 1n 2012nb s b s b s b ()a s a a s a G S ----+++⋯+=+++⋯+(n≥m)2、参数a0,a1,a2,...an和b0,b1,b2,...bm因小组而异。
设计要求:1. 能用MATLAB 解复杂的自动控制理论题目。
2. 能用MATLAB 设计控制系统以满足具体的性能指标。
3. 能灵活应用MATLAB 的CONTROL SYSTEM 工具箱和SIMULINK 仿真软件,分析系统的性能。
三、设计步骤:1、自学MATLAB软件的基本知识,包括MATLAB的基本操作命令。
控制系统工具箱的用法等,并上机实验。
2、基于MALAB用频率法对系统进行串联校正设计,使其满足给定的领域性能指标。
要求程序执行的结果中有校正装置传递函数和校正后系统开环传递函数,校正装置的参数T,α等的值。
已知开环传递函数为G(S)= 0(2)(40)k s s s ++,使用频率法设计串联滞后—超前校正装置,使系统的相角裕度大于等于40°,静态速度误差系数等于20。
校正前根据上式可化简G(S)= 00.0125(0.51)(0.0251)k s s s ++,所以公式G(S)=20(0.51)(0.0251)s s s ++,所以=1,则c w = 6.1310,相角裕度γ为9.3528。
控制系统的超前校正设计教材
控制系统的超前校正设计摘要:用MATLAB 进行控制系统的超前校正设计是对所学的自动控制原理的初步运用。
本课程设计先针对校正前系统的稳定性能,用MATLAB 画出其根轨迹、奈奎斯特曲线及伯德图进行分析,是否达到系统的要求,然后对校正装置进行参数的计算和选择,串联适当的超前校正装置。
最后用MATLAB 对校正前后的系统进行仿真分析,校正后的系统是否达到要求,并计算其时域性能指标。
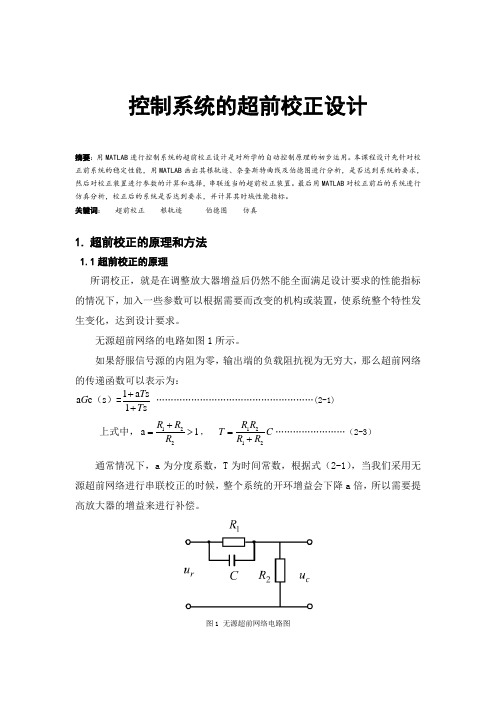
关键词: 超前校正 根轨迹 伯德图 仿真1. 超前校正的原理和方法1.1超前校正的原理所谓校正,就是在调整放大器增益后仍然不能全面满足设计要求的性能指标的情况下,加入一些参数可以根据需要而改变的机构或装置,使系统整个特性发生变化,达到设计要求。
无源超前网络的电路如图1所示。
如果舒服信号源的内阻为零,输出端的负载阻抗视为无穷大,那么超前网络的传递函数可以表示为:1asa c s 1sT G T ++()=………………………………………………(2-1) 上式中,122a 1R R R +=>, 1212R RT C R R =+……………………(2-3) 通常情况下,a 为分度系数,T 为时间常数,根据式(2-1),当我们采用无源超前网络进行串联校正的时候,整个系统的开环增益会下降a 倍,所以需要提高放大器的增益来进行补偿。
图1 无源超前网络电路图同时,根据上式,我们可以得到无源超前网络c a s G ()的对数频率特性。
超前网络对频率在1/aT 至1/T 之间的信号有这明显的微分作用,在该频率段内,输出信号相角比输入信号相角超前,这也即是超前校正网络名称的由来。
在最大超前角频率m ω处,具有最大超前角m ϕ。
超前网络的相角为:c arctga arctgT ϕωω-ω()=T将上式对ω求导并且令其为零,得到最大超前角频率:m 1/ω=将上上式代入上式,得最大超前角:m a 1arcsin a 1ϕ-==+ ……………………………………(2-4)同时还容易得到m c ''ω=ω。
超前滞后校正课程设计

超前滞后校正课程设计一、课程目标知识目标:1. 学生能理解“超前滞后校正”的概念,掌握其在控制系统中的应用。
2. 学生能描述不同类型的超前滞后校正器的设计原理和特点。
3. 学生能运用数学工具分析并计算超前滞后校正器对系统性能的影响。
技能目标:1. 学生能够运用模拟或数字工具设计简单的超前滞后校正电路。
2. 学生能够通过实验或仿真软件评估校正前后控制系统的动态响应和稳定性。
3. 学生能够结合实际案例,分析和解释使用超前滞后校正的意义和效果。
情感态度价值观目标:1. 学生能够培养对自动化和控制系统学科的兴趣,认识到其在现代技术中的重要性。
2. 学生能够通过小组合作和讨论,发展团队协作能力和问题解决的积极态度。
3. 学生能够在面对控制系统的设计和优化问题时,形成科学严谨、勇于创新的精神。
课程性质分析:本课程为自动化控制专业高年级学生设计,旨在深化学生对控制系统校正技术的理解,并通过实践提高学生解决实际问题的能力。
学生特点分析:高年级学生已具备一定的控制理论基础和实际操作技能,能快速接受新概念,并渴望将理论知识与实际应用相结合。
教学要求:1. 理论与实践相结合,注重学生动手能力的培养。
2. 引导学生主动探究,鼓励创新思维和批判性思维。
3. 以学生为中心,提供个性化学习路径,确保每位学生都能达到既定的学习成果。
二、教学内容本课程教学内容围绕“超前滞后校正”这一主题,参考教材相关章节,科学系统地组织以下内容:1. 超前滞后校正基础理论:- 控制系统校正的必要性- 超前滞后校正器的基本原理- 超前滞后校正器的数学模型2. 超前滞后校正器设计方法:- 校正器的设计步骤- 不同类型的超前滞后校正器参数计算- 校正器对系统性能的影响分析3. 实践应用与案例分析:- 超前滞后校正器在控制系统中的应用案例- 实验室或仿真软件实践操作- 控制系统性能评估方法教学大纲安排如下:第一周:控制系统校正概述,超前滞后校正基本理论第二周:超前滞后校正器设计方法,数学模型分析第三周:校正器参数计算,系统性能影响分析第四周:应用案例分析,实验室实践操作与讨论教学内容进度安排与教材章节紧密关联,确保学生能够循序渐进地掌握相关知识,同时注重理论与实践相结合,提高学生的实际操作能力。
控制系统的超前校正设计说明书
课程设计任务书学生姓名: 专业班级: 自动化 指导教师: 工作单位: 自动化学院 题 目: 控制系统的超前校正设计初始条件:已知一单位反馈系统的开环传递函数是)3.01)(1.01()(s s s Ks G ++=要求系统的静态速度误差系数6≤v K ,45γ︒≥。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)(1) 用MATLAB 作出满足初始条件的K 值的系统伯德图,计算系统的幅值裕度和相位裕度。
(2) 在系统前向通路中插入一相位超前校正,确定校正网络的传递函数,并用MATLAB进行验证。
(3) 用MATLAB 画出未校正和已校正系统的根轨迹。
(4) 课程设计说明书中要求写清楚计算分析的过程,列出MATLAB 程序和MATLAB 输出。
说明书的格式按照教务处标准书写。
时间安排:指导教师签名: 年 月 日 系主任(或责任教师)签名: 年 月 日摘要随着社会不断进步,经济飞速发展,无论是工业还是其它产业对系统控制的要求越来越高。
当一个系统不满足要求时,就需要对这个系统进行校正。
本设计详细分析了超前校正网络参数的求取,整个过程中都有效的利用了MATLAB进行计算与验证。
最后对未校正系统与已校正系统的动态性能进行了分析对比。
关键词:系统、控制、校正、MATLAB目录1 超前校正的原理 (1)1.1 什么是校正 (1)1.2 超前校正的原理及方法 (1)1.2.1 超前校正的原理 (1)1.2.2 超前校正的应用方法 (2)2 控制系统的超前校正设计 (4)2.1 初始状态的分析 (4)2.2 超前校正分析及计算 (6)2.2.1 校正装置参数的选择和计算 (6)2.3未校正与已校正根轨迹 (9)2.3.1未校正系统根轨迹 (9)2.3.2已校正系统的根轨迹 (10)2.4校正对系统改变的分析 (11)3心得体会 (13)参考文献 (15)控制系统的超前校正设计1超前校正的原理1.1什么是校正所谓校正,就是在系统中加入一些其参数可以根据需要而改变的机构或装置,是系统整个特性发生变化。
控制系统的滞后-超前校正设计

课 程 设 计题 目: 控制系统的滞后-超前校正设计 初始条件:已知一单位反馈系统的开环传递函数是)2)(1()(++=s s s Ks G要求系统的静态速度误差系数110v K S -≥,相角裕度 45≥γ。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)(1)用MATLAB画出满足初始条件的最小K值的系统伯德图,计算系统的幅值裕度和相角裕度。
(2)前向通路中插入一相位滞后-超前校正,确定校正网络的传递函数。
(3)用MATLAB画出未校正和已校正系统的根轨迹。
(4)用Matlab画出已校正系统的单位阶跃响应曲线、求出超调量、峰值时间、调节时间及稳态误差。
(5)课程设计说明书中要求写清楚计算分析的过程,列出MATLAB程序和MATLAB输出。
说明书的格式按照教务处标准书写。
时间安排:指导教师签名:年月日系主任(或责任教师)签名:年月日目录 (I)摘要 (II)1设计题目和设计要求 (1)1.1题目 (1)1.2初始条件 (1)1.3设计要求 (1)1.4主要任务 (1)2设计原理 (2)2.1滞后-超前校正原理 (2)3设计方案 (4)3.1校正前系统分析 (4)3.1.1确定未校正系统的K值 (4)3.1.2未校正系统的伯德图和单位阶跃响应曲线和根轨迹 (4)3.1.3未校正系统的相角裕度和幅值裕度 (7)3.2方案选择 (7)4设计分析与计算 (8)4.1校正环节参数计算 (8)的确定 (8)4.1.1已校正系统截止频率ωcω的确定 (8)4.1.4校正环节滞后部分交接频率aω的确定 (8)4.1.1校正环节超前部分交接频率b4.2校正环节的传递函数 (8)4.3已校正系统传递函数 (9)5已校正系统的仿真波形及仿真程序 (10)5.1已校正系统的根轨迹 (10)5.2已校正系统的伯德图 (11)5.3已校正系统的单位阶跃响应曲线 (12)6结果分析 (13)7总结与体会 (14)参考文献 (14)本科生课程设计成绩评定表........................................ 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
计算机控制系统课程设计--超前滞后矫正控制器设计《计算机控制》课程设计报告题目: 超前滞后矫正控制器设计姓名:学号: 10级自动化2013年12月2日《计算机控制》课程设计任务书学号班级学生指导教师题目超前滞后矫正控制器设计设计时间2013年 11 月 25 日至 2013 年12 月 2 日共 1 周设计要求设计任务:(按照所选题目内容填写)13.超前滞后校正设计设单位反馈系统的开环传递函数为100()(0.11)(0.011)G ss s s=++,采用模拟设计法设计数字控制器,使校正后的系统满足:速度误差系数不小于100,相角裕度不小于40度,截止角频率不小于20。
方案设计:1.完成控制系统的分析、设计;2.选择元器件,完成电路设计,控制器采用MCS-51系列单片机(传感器、功率接口以及人机接口等可以暂不涉及),使用Protel绘制原理图;3.编程实现单片机上的控制算法。
报告内容:1.控制系统仿真和设计步骤,应包含性能曲线、采样周期的选择、数字控制器的脉冲传递函数和差分方程;2.元器件选型,电路设计,以及绘制的Protel原理图;3.软件流程图,以及含有详细注释的源程序;4.设计工作总结及心得体会;5.列出所查阅的参考资料。
指导教师签字:系(教研室)主任签字:213年11月25日1.控制系统分析和设计 1.1实验要求设单位反馈系统的开环传递函数为)101.0)(11.0(100)(++=s s s s G ,采用模拟设计法设计数字控制器,使校正后的系统满足:速度误差系数不小于100,相角裕度不小于40度,截止角频率不小于20。
1.2系统分析(1)使系统满足速度误差系数的要求:()()s 0s 0100lim ()lim1000.1s 10.011V K s G s s →→=•==++(2)用MATLAB 画出100()(0.11)(0.011)G s s s s =++的Bode 图为:-150-100-50050100M a g n i t u d e (d B )101010101010P h a s e (d e g )Bode DiagramGm = 0.828 dB (at 31.6 rad/s) , P m = 1.58 deg (at 30.1 rad/s)Frequency (rad/s)由图可以得到未校正系统的性能参数为: 相角裕度0 1.58γ=︒, 幅值裕度00.828g KdB dB=,剪切频率为:030.1/c rad s ω=, 截止频率为031.6/g rad sω=(3)未校正系统的阶跃响应曲线0.20.40.60.811.21.41.61.82Step ResponseTime (seconds)A m p l i t u d e可以看出系统产生衰减震荡。
(4)性能分析及方法选择系统的幅值裕度和相角裕度都很小,很容易不稳定。
在剪切频率处对数幅值特性以-40dB/dec 穿过0dB 线。
如果只加入一个超前校正网络来校正其相角,超前量不足以满足相位裕度的要求,可以先缴入滞后,使中频段衰减,再用超前校正发挥作用,则有可能满足要求。
故使用超前滞后校正。
1.3模拟控制器设计(1)确定剪切频率c ωc ω过大会增加超前校正的负担,过小会使带宽过窄,影响响应的快速性。
首先求出幅值裕度为零时对应的频率,约为30/g rad sω=,令30/c g rad sωω==。
(2)确定滞后校正的参数22113/10c rad s T ωω===, 20.33Ts=,并且取得10β=112110.33/rad s T T ωβ===, 13T s =则滞后校正的控制器为10.331()31c s Gs s +=+此时系统的响应曲线为:-150-100-50050100M a g n i t u d e (d B )10101010101010P h a s e (d e g )Bode DiagramGm = 16.9 dB (at 26.5 rad/s) , P m = 26.9 deg (at 8.73 rad/s)Frequency (rad/s)滞后校正后的性能参数为: 相角裕度 026.9γ=︒, 幅值裕度 016.9g KdB dB=,剪切频率为:08.73/c rad s ω=, 截止频率为026.5/g rad s ω=系统仍需要进行超前校正 (3)确定超前校正的参数在图中过(c ω,0dB )作-20dB/dec 线,与原先的Bode 相交,交点的角频率为:3313/rad s T ω==, 30.3Ts=443130/rad s T T βω===,40.03Ts =超前矫正控制器的传递函数为:20.31()0.031c s Gs s +=+(4)超前滞后校正同时作用时系统的Bode 图:-150-100-50050100M a g n i t u d e (d B )10101010101010P h a s e (d e g )Bode DiagramGm = 13.5 dB (at 62.1 rad/s) , Pm = 48.4 deg (at 24.4 rad/s)Frequency (rad/s)相角裕度 048.4γ=︒, 幅值裕度 013.5g KdB dB=,剪切频率为:024.4/c rad s ω=, 截止频率为062.1/g rad s ω=校正后的系统性能已经满足了性能指标要求。
(5)画出校正后系统的阶跃响应曲线0.20.40.60.811.21.4Step ResponseTime (seconds)A m p l i t u d e(6)设计好的控制器传递函数为:(0.331)(0.31)()(31)(0.031)c s s G s s s ++=++1.4用模拟法设计数字控制器(1)模拟控制器离散化采用双线性变换法。
(2)采样周期选择取采样周期T=0.01s,因为考虑到A/D ,D/A 转换的时间以及单片机计算的时间,采样时间不能选的太小,但是为了保证离散控制器的控制仍能满足性能指标的要求,采样时间不能取得太大。
取采样周期为10ms,给程序运行留下了足够的时间,而且由后面可见控制效果仍满足性能指标要求,所以取采样周期为10ms 。
(3)将模拟控制器离散化离散化后得脉冲函数为:220.9715 1.8820.9116() 1.7110.7119c z z G z z z -+=-+(4)被控对象离散化离散化的被控对象为:2320.012870.039840.007441() 2.273 1.6060.3329p z z G z z z z ++=-+-(5)绘制出离散系统的Bode 图-50050100M a g n i t u d e (d B )101010101010-360-270-180-90P h a s e (d e g )Bode DiagramGm = 9.11 dB (at 47.7 rad/s) , P m = 41.3 deg (at 24.4 rad/s)Frequency (rad/s)相角裕度 041.3γ=︒, 幅值裕度 09.11g KdB dB=,剪切频率为:024.4/c rad s ω=, 截止频率为041.3/g rad s ω=离散化的控制器仍旧满足性能指标的要求,设计合理。
(6)离散系统的阶跃响应曲线:0.20.40.60.811.21.4Step ResponseTime (seconds)A m p l i t u d e(6)数字控制器的脉冲传递函数:220.9715 1.8820.9116() 1.7110.7119c z z G z z z -+=-+1.5控制系统的编排结构(1)编排结构的选择如果使用直接型编排结构,如果控制器中任一系数存在误差,则将使控制器所有的零极点产生响应的变化,严重影响系统的性能。
在控制器设计时采用了超前滞后校正,所以采用串联型结构比较简单,而且任何一系数有误差,不会使控制器所有的零极点产生相应的变化。
因为()c G z 有复数零点,故可以写成12121 1.9370.9383()0.9715*1 1.7110.7119c z z G z z z -----+=-+(2)转换为差分方程的形式:0.9715可以通过一个比例环节实现,可以不用考虑。
只需在设计好的控制器上加个比例因子即可。
u()() 1.937(1)0.9383(2) 1.711(1)0.7119(2)k e k e k e k u k u k =--+-+---2.硬件电路设计 2.1元器件选择(1)控制器选择选择8051单片机,外接晶振为2MHz. (2)A/D 选择选择ADC0809,该AD 有8路输入通道,8位A/D 转换器,分辨率为8位,转换时间为100s μ,(时钟为640KHz 时),130s μ(时钟为500KHz 时);单个+5V 供电,模拟输入电压范围为0到5V,不需要零点和满课度校准;内部没有时钟,所以需要外接时钟,时钟从单片机的ALE 引脚引出。
在经过两个D 触发器分频,从而达到500KHz 的时钟信号。
D 触发器选择74LS174。
A/D 转换时间为130s μ,应该能满足设计的要求。
(3)D/A 选择选择DAC0832,分辨率为8位;可单缓冲,双缓冲或者直接数字输入;只需要在满量程下调整线性度;单一电源供电+5V到+15V;可以满足设计的要求。
输出电压值为:82refout D VU* =-2.2电路的设计(1)A/D转换电路的设计将AD转换的ADDA,ADDB,ADDC接地,选择IN0锁存器。
EOC接P2.2,转换结束则输出1,否则输出为0;OE接P2.1,选择是否输出数据。
OE=0,输出高阻态,OE=1输出数字量;ST接P2.0,转化开始信号。
由1变零转换开始;IN0接输入的模拟数据e(t);IN1-IN7悬空;Clock接分频器SUN7474的输出端,输入500HZ时钟信号;Vref(+)接+5V,Vreft(-)接地,VCC接电源,GND接地;ALE地址所存,上跳沿所存,可以接在P2.O口。
D0-D7接单片机的P1.0-P1.7;(2)D/A转换电路设计D0-D7接单片机的P0.0-P0.7,数字量输入;将CS,WR1,WR2,XFER,引脚接地;ILE引脚接+5V,Vref选择+5V,GND接地;此时DAC0832处于直通工作方式,一旦有数字量输入,就直接进入DAC寄存器,进行D/A转换。
(3)8051单片机的电路设计:P0.0-P0.7接D/A转换数字输入端;P1.0-P1.7接A/D转化数字输出端;P2.0接A/D转换ST端;P2.1接A/D转换OE端;P2.2接A/D转换EOC端;外接2MHZ的时钟电路输入到时钟端XTAL1,XTAL2;外接复位电路到RET;2.2硬件电路图V c c20Iout111lsbDI07Iout212DI16DI25Rfb 9DI34DI416Vref8DI515DI614msbDI713ILE 19WR218C S 1WR12Xfer17U3DAC0832IN-026msb2-1212-220IN-1272-3192-418IN-2282-582-615IN-312-714lsb2-817IN-42EOC7IN-53ADD-A 25IN-64ADD-B 24ADD-C 23IN-75ALE22ref(-)16ENABLE 9START 6ref(+)12CLOCK 10U1ADC0809542312U4A CA139GNDGNDVCCEA/VP 31X119X218RESET 9R D 17WR 16INT012INT113T014T115P101P112P123P134P145P156P167P178P0039P0138P0237P0336P0435P0534P0633P0732P2021P2122P2223P2324P2425P2526P2627P2728PSEN29ALE/P 30TXD 11RXD 10U28051A8A7ST A6A5A4CLOCKA3A2EOCA1A8OE A7A6A5A4ST A3OE A2EOC A1NetLabel28D1D2D3D4D5D6D7D8D1D2D3D4D5D6D7D8GNDGNDVCCGNDintputou tp utR 1R 2S1SW -PBC 1VCCGNDY12MHzC 2C 3GNDALE VCCQ12Q25Q37Q410Q512Q615D13D24D36D411D513D614CLK 9MR 1U?74LS174GNDALEVCCCLOCK3.用单片机实现控制算法 3.1流程图开始初始化开定时器N计时时间到10msY启动A/D转换N转换结束Y读AD计算u(k)D/A转换等待下次中断(2)程序编写#include<reg51.h>#define uchar unsigned char #define uint unsigned intsbit ST=P2^0;sbit OE=P2^1;sbit EOC=P2^2; //A/D转换结束标志位void main(){float uk_1=0.0;float uk=0.0;float ek=0.0;float ek_1=0.0;//初始化float ek_2;float uk_2;ST=0;OE=0; //输出高阻态/*定时器中断初始化*/TMOD|=0XF9;// 设置T1工作在方式1,16位定时器方式TH1=0x7E;TL1=0xE0; //装初值,定时10msEA=1;//开总中断ET1=1;//开T1中断TR1=1;//启动定时器1while(1){if(EOC==1){uk_2=uk_1;ek_2=ek_2;uk_1=uk;ek_1=ek;OE=1;//输出转换数据ek=P1;//给单片机输入数据OE=0 ; //输出高阻态}uk=ek-1.937*ek_1+0.9383*ek_2+1.711*uk_1-0 .7119*uk_2; //差分方程P0=(uchar)uk;//数据输入到D/A转换器while (EOC==0) ;//等待A/D转换结束}}/*************定时器中断处理************/void time(void) interrupt 1 using 1{ TH1=0XF9;TL1=0x7E;//重装初值ST=1;ST=0;//开始下一次转换数据}4.设计总结与体会4.1设计过程总结:(1)首先用自动控制原理的知识,设计出满足要求的超前滞后校正控制器。